基于视频的人体上半身运动跟踪系统
人体运动追踪技术的原理与实现步骤
人体运动追踪技术的原理与实现步骤人体运动追踪技术是一种通过计算机视觉和图像处理技术对人体运动进行实时跟踪和分析的技术。
它在许多领域中有着广泛的应用,如体育训练、医疗康复、安防监控等。
本文将介绍人体运动追踪技术的原理和实现步骤。
一、原理1. 图像采集:人体运动追踪技术首先需要获取人体运动的图像或视频。
通常使用摄像机、深度相机或红外热像仪等设备进行图像的采集。
这些设备能够捕捉到人体运动时的位置、姿态、速度等信息。
2. 特征提取:从采集到的图像中提取出与人体有关的特征。
这些特征可以是人体关节的位置、骨骼的姿态、身体的形状等。
通常使用计算机视觉和图像处理技术来进行特征提取,例如边缘检测、图像分割等算法。
3. 运动估计:根据特征的变化来估计人体的运动。
通过分析特征在连续帧之间的差异和变化,可以计算出人体的运动轨迹和轨迹的速度。
常用的运动估计算法包括光流法、KLT算法等。
4. 姿态估计:根据人体的运动估计出人体的姿态。
姿态估计是一个复杂的问题,通常需要先推测人体的骨骼结构,再通过寻找最佳匹配的方法来估计人体的姿态。
现在常用的姿态估计算法有基于模型的方法、基于深度学习的方法等。
二、实现步骤1. 数据采集:使用合适的设备对人体的运动进行采集。
常见的设备包括摄像机、深度相机、红外热像仪等。
采集时需要注意灯光、背景等环境因素的影响,确保图像的质量和准确性。
2. 特征提取与选择:根据具体的应用需求选择合适的特征。
例如,如果需要检测人体的关节位置和姿态,可以选择提取关节点的坐标信息。
如果需要检测人体的形状和轮廓,可以选择进行图像分割和形态学处理。
3. 模型训练与优化:根据采集到的数据进行模型的训练和优化。
常见的方法有机器学习算法和深度学习算法。
在训练时需要对数据进行预处理、特征选择和模型调优,以提高运动追踪的准确性和鲁棒性。
4. 运动追踪与分析:使用训练好的模型对实时的图像或视频进行运动追踪和分析。
根据采集到的特征,计算人体的运动轨迹、姿态和速度等信息。
基于视频的人体运动肢体检测

Absr c t a t:T a t r n n l z h o e o ma r m i e o c p u e a d a ay e t e p s fhu n fo v d o we mus e e tt e mo i o y fr t W he h td t c h vng b d is n te
fa i e e t l t o n p i a o g rt m a o e e t h o t u fmo i g b d c u a ey B s d o r med f r n i h d a d o t l f w a o h c n n t tc e c n o ro v n o y a c r tl . a e n f a me c l l i d t fa i e e t l t o , r p s emeh d o a i g t e e g i esi e d n mi r g o oo t i h d e r med f r n i h d wep o o et t o f v n d e p x l t y a c e in t b a n t e e g f a me h s h n h p i t o v me t Ac o d n ep i r n wld e o u n b d ,a o h r l o i m s s r p s d t k o n s fmo e n c r i g t t r o e g f ma o y n t e g rt i a o p o o e ma e a oh o k h a h l o f r e r c s ig o h n e a e d e p i t t r t a h vn o y c n b e e t d mo e c mp e ey u t r p o e sn f t e i t g td e g o n s Af h t t e mo i g b d a e d t ce r o l tl. h r e
基于视频人体运动分析
l 引 言
波 器 对 视 频 进 行 滤 波 , 波 响应 经 过 处 理 后 得 到 特 定 的 动作 特 征 。 滤 该 方 法 的 灵 感 来 自与 滤 波 方 法 在 基 于 图 像 的 识 别 巾 的 成 功 应 用 。 时 空 滤 波 结 构 , 方 向 高 斯 核 以 及 它 的 梯 度 和 方 向 G b r 波 器 如 ao 滤
轨 迹 : 动物体 的轨 迹也 常被 用来 作 为人们 活动 的特 征 。现 在 已 运
个 3 的 时空 卷 体 很 自然 的可 以看 作 是 一 个 3 的 张量 。V s e u D 维 ai s lc 提 出将 人 体 的 动 作 、 的 身 份 以 及 关 节 角 度 轨 迹 作 为 一 个 张量 的 人 独 立 维 度 。通 过 将 所 有 的数 据 张 量 分 解 到 主 导 的模 式 ( 成 份 分 主 析 的一 种 推 广 ) 。基 于 张 量 的方 法 为 整 体 匹 配 视 频 提 供 了 一 个 直 接的方法 , 而不 用 像 前 面 的 那 些 方 法 那 样 利 用 中 间 的 特 征 表 示 。 而 且 , 们 可 以 与其 他 特 征 结 合 , 如 光 流 、 空 滤 波 响 应 。这 种 他 例 时
ห้องสมุดไป่ตู้
近年来 , 随着 视 频 分 析 技 术 的不 断 进 步 , 人 的 动 作或 活 动 相 与 关 的行 为 分 析 在 高 级 人 机 交 互 、 全 监 控 、 频 会 议 、 疗 诊 断 及 安 视 医
基 于 内容 的 图像 存储 与检 索 等方 面具 有 广泛 的应 用 前景 和 潜 在 的 经 济 价 值 。术语 “ 作 ” A t n 和 活 动 ( t i ) 有 关视 觉 的 文 动 ( ci ) o Ac vt 在 i y
pose detect原理

pose detect原理
Pose detection是一种计算机视觉技术,用于识别和跟踪人体的姿势和动作。
其原理是基于深度学习和计算机视觉算法,通过分析图像或视频中的人体轮廓和关键点来识别人体的姿势。
下面我将从几个方面来解释pose detect的原理。
首先,pose detect的原理基于深度学习模型,通常使用卷积神经网络(CNN)来提取图像中的特征。
这些特征可以包括人体的轮廓、关节位置和姿势信息。
通过对大量标注好的人体姿势数据进行训练,模型能够学习到人体姿势的特征和模式。
其次,pose detect的原理还涉及到关键点的检测和跟踪。
在训练好的深度学习模型的帮助下,系统可以识别图像中的人体关键点,如头部、肩部、手肘、膝盖等关节的位置。
通过跟踪这些关键点在连续帧中的变化,系统可以实时地捕捉人体的姿势和动作。
此外,pose detect的原理还包括姿势估计和优化。
一旦系统检测到人体的关键点,它可以利用数学模型和优化算法来估计人体的姿势。
这可能涉及到对关键点之间的相对位置和角度进行推断和计算,以确定人体的具体姿势。
总的来说,pose detect的原理基于深度学习模型和计算机视觉算法,通过识别人体的关键点和姿势信息来实现对人体姿势和动作的检测和跟踪。
这项技术在许多领域都有广泛的应用,包括体育训练、医疗康复、虚拟现实和增强现实等。
希望这个回答能够全面地解释pose detect的原理。
基于视频的三维人体运动跟踪系统的设计与实现

北 1 0 8 ) 0 0 0
北 京 1 0 4 ) 0 0 9
摘
要
在 优 化 粒 子 滤 波 跟 踪 框 架 下 , 计 并 实 现 了一 个 结 合 多 种 图像 特 征 、 多 摄 像 机 环 境 下 跟 踪 人 体 运 动 的 三 设 在
J n ,2 0 ue 07
基 于 视频 的 三维 人体 运 动 跟踪 系统 的设 计 与 实现
邓 宇 李振波 华 李
( 国科 学 院计 算 技 术 研 究 所 智 能 信 息 处 理 重 点 实 验 室 中 ( 家智 能 计 算 机 研 究 中心 国
( 国科 学 院研 究 生 院 中
3 b d d l a r d l n ma el eio d mo e ,wec n d f et eta kn be tf n t n a d D o y mo e ,c meamo e d i g i l o d l a k h a ei h rc ig o jc u ci n n o
r s l e i sn p i ie p ril i e e o v t i g o tm z d a tce fl r.Th e e i n s s w ha ta ki a e o s r tn r s ls u t e xp rme t ho t t r c ng nd r c n tuc ig e u t ma e b urs s e a e a c r t n fe tv d y o y t m r c u a e a d e f c ie.Th ss s e c n b p l d t e e a r a u h a p tn i y t m a e a p i O s v r la e s s c ss ori g e mo i n a l ssa d h to nay i n uma n’ to na i ma i n
基于视频序列的人体运动分析系统的研究与实现

术, 具有十分广阔和重要 的应 用领域 , 它在智能监控 、 交互 、 人机 运 动分析 和虚拟现实等领域都有着广泛的应用。 尽 管在过去 的十多年 时间里 , 人们对 该问题作 了不少 有益 的工作 。然而到 目 为止 , 前 还没有 任何一 套系统 可以真正鲁 棒 地从视频序列 中得到和恢复人体的运动信息和三维结构。究其 原因。 首先人体运动是 一个 复杂的运动 系统 , 人体的运 动具有很 大的 自由度和高度的非 线性特 点。其次人 体是非刚 体 , 且结 而
体的属性诸如空间位置 、 态 、 姿 运动速度 以及恢 复物体的三维结
1 前
言
构, 即而可以对场 景在较高层 次上 作 出相应 的解 释与分 析。人
人 体运动分析是近年来计算机视觉领域 中备受关注的前沿 方向之一 , 是当代生物 力学和计算 机视觉 相结合 的一项重要技
体生物力学研究人体运动过程中肢体间的各种运动学量和动力 学世 , 而设计 、 、 进 制造 仿生人 体运 动模 型。因为人 体运动 的全
关键词
人体运动分析 图像处理 运动 目 检测 运 动 目 跟踪 标 标
T HE S TEM YS OF Vm EO. AS B ED HUM AN OTI M ON ANAL YS S I
THAT RES EARCHED AND COM PLE TED
构复杂 , 动中存在 着严重的遮 挡现象。此外 , 在运 人体 的外表 由 于穿着服装 , 人体的外 观表现出极 大的差异 , 很难用统一的模型 加以表 达。正是 由于上述 问题 的存 在 , 目前对于人 体运动 分析
基于视频图像分析的行人检测与轨迹跟踪
基于视频图像分析的行人检测与轨迹跟踪随着智能化技术的不断发展和普及,越来越多的应用场景需要对行人进行检测和轨迹跟踪。
行人检测与轨迹跟踪技术可以应用于视频监控、交通管理、智能巡检等领域,具有重要的实际意义和应用价值。
本文将介绍基于视频图像分析的行人检测与轨迹跟踪的方法与应用。
行人检测是指在视频图像中准确地识别出行人目标,并进行定位。
行人检测的关键在于准确地判断图像中的目标是否为行人,并将其与背景进行有效区分。
通过深度学习算法,可以让计算机模型学习到行人在图像中的特征和模式,并使用这些特征进行行人检测。
常用的深度学习算法包括卷积神经网络(CNN)、目标检测算法(如Faster R-CNN、YOLO等)等。
这些算法能够对图像进行快速且准确的行人检测,实现实时监测和预警。
轨迹跟踪是指通过连续帧图像的时间序列,对行人在不同帧之间的运动进行跟踪与分析。
轨迹跟踪主要分为两个步骤:检测和匹配。
检测步骤利用行人检测算法对每一帧图像进行目标检测,得到每一帧中的行人目标区域。
匹配步骤则利用跟踪算法将相邻帧中的行人目标区域进行匹配,形成行人轨迹。
常用的轨迹跟踪算法包括卡尔曼滤波、粒子滤波、多目标跟踪等。
这些算法能够有效地对行人进行轨迹分析,提供行人的运动轨迹和路径信息。
基于视频图像分析的行人检测与轨迹跟踪具有广泛的应用前景。
在视频监控领域,利用行人检测与轨迹跟踪技术可以实现对人员的自动识别与跟踪,提高视频监控的效果和效率。
在交通管理领域,行人检测与轨迹跟踪技术可以用于行人过马路的安全管理与交通流量分析,提供有关行人行为的统计和决策依据。
在智能巡检领域,行人检测与轨迹跟踪技术可以应用于巡检机器人和智能无人车等设备,提供智能化的巡检和运输服务。
然而,基于视频图像分析的行人检测与轨迹跟踪面临一些挑战。
首先,图像数据的质量和噪声会影响算法的准确性和鲁棒性。
其次,行人的姿态、遮挡、尺度变化等因素也会对检测和跟踪结果产生影响。
此外,复杂的场景和多目标跟踪也是研究的难点之一。
视频中的行为识别与跟踪技术研究
视频中的行为识别与跟踪技术研究在数字化时代,我们生活的世界正变得越来越图像化,其中最具代表性的就是视频。
视频技术已经广泛应用于监控、安防、娱乐等领域,如何通过技术手段从视频中提取有价值的信息对这些领域之外的生产和生活也有很大的意义。
而其中最为关键的技术就是行为识别与跟踪技术。
行为识别技术是指从视频流中对人物行为进行识别,包括弯腰、举手、走路、奔跑、跳跃等各种动作,目前主要采用的方法是通过计算机视觉技术来完成。
识别技术是基于人体姿态估计的,在人进行各种动作的过程中,其身体的一些部位比如四肢、身体轮廓等有规律地移动和变化,通过对这些变化的分析和测量,我们可以建立各种动作的模型,从而对行为进行识别。
但是这项技术受到人体姿态的影响比较大,如何在不同的环境下对行为进行准确的识别是一个难点问题。
为了解决这个问题,学者们提出了一种新的行为识别技术——物体轮廓跟踪技术。
该技术通过对视频场景中的每一个物体进行轮廓提取和持续跟踪,建立了物体与轮廓间的对应关系,并通过物体跟踪算法识别物体在视频中的运动,从而实现对人体行为的识别。
这种方法的优点在于不需要事先预测人体姿态,利用物体轮廓的变化能够更好地对运动进行识别。
除了行为的识别,行为的跟踪同样具有很重要的意义。
行为跟踪技术是指识别并跟踪特定行为或物体,该技术可以在广泛应用于人脸识别、犯罪侦查、交通检测、医疗监控等领域中。
特别是在犯罪侦查和医疗监控领域中,行为跟踪技术的作用更为突出。
在犯罪侦察方面,通过行为跟踪技术可以有效地帮助警方追踪嫌疑人的行踪,并为破案提供有力的证据。
传统的行为识别方法容易受到环境干扰和误差影响,而行为跟踪技术可以对目标进行准确跟踪,不会受到周围环境的影响,从而提高了行为识别的准确率。
在医疗监控方面,行为跟踪技术可以帮助医护人员监控患者的行为,比如是否出现意识混乱、是否需要帮助等情况。
其实现原理同样是通过采用计算机视觉技术对患者进行轮廓识别和运动跟踪,从而发现潜在的医疗问题,为医疗人员提供准确的诊断和治疗。
基于视频的人体目标跟踪与识别技术
工作展望
技术发展
随着计算机视觉和人工智能技术的不 断发展,基于视频的人体目标跟踪与 识别技术将会有更多的应用场景和需 求。未来,该技术将进一步向着智能 化、自动化、高效化的方向发展,为 各个领域提供更加精准和高效的服务 。
技术挑战
虽然该技术已经取得了很大的进展, 但是仍然存在一些挑战和问题需要解 决。例如,如何提高算法的鲁棒性和 适应性,如何处理大规模和复杂场景 下的目标跟踪与识别问题等。未来, 研究者们需要进一步探索和创新,以 解决这些问题并推动技术的发展。
计算资源和存储空间来处理大规模数据集。
实时性挑战
计算效率
人体目标跟踪与识别技术需要大量的计算资源,包括高性能的处理器和GPU等。为了实现 实时性,需要优化算法和代码,提高计算效率,以满足实时处理的需求。
并行处理
为了加速目标跟踪与识别过程,可以采用并行处理技术,将计算任务分配给多个处理器或 GPU同时进行,以提高处理速度。
基于深度学习的方法
总结词
基于深度学习的方法利用神经网络学习图像中的特征表示进行目标跟踪。
详细描述
基于深度学习的方法通过训练深度神经网络来学习图像中的特征表示,并利用这些特征在后续帧中寻找匹配的目 标。这种方法能够自动提取有效的特征表示,对光照变化和目标形变具有较强的鲁棒性,但需要大量的标注数据 进行训练。
技术应用
基于视频的人体目标跟踪与识别技术 的应用前景非常广阔。未来,该技术 将在智能安防、智能交通、智能家居 等领域得到更加广泛的应用。同时, 该技术还可以与其他技术相结合,如 语音识别、手势识别等,实现更加智 能化和自然化的人机交互方式。
THANKS
谢谢您的观看
该技术面临的主要挑战包括目标遮挡 、光照变化、动态背景等。为了解决 这些问题,研究者们采用了多种算法 和技术,如特征提取、目标检测、运 动跟踪等,以实现准确的目标跟踪与 识别。
基于视频分析的人体行为检测系统即肢体动作检测
目录
目录
CONTENTS
1 平台基本情况
2 主要应用
1
本系统特点
使用基于深度学习视觉分析技术,采用行人分割、人体姿态识别、人脸识别相结合,不同于传统数 人头和活动目标检测方式来统计小场景人数,可以对密集人群进行分析。有效对抗人体之间的遮挡, 可对人进行精确识别、跟踪和行为分析,准确率高。
异常行为识别-入侵检测
基于深度学习技术进行人员监测和 跟踪, 并针对进入所设定虚拟禁区或跨 越所设定的折线(虚拟边界)的目标进 行监测跟踪,并按照用户设置的规则触 发报警。
可用于高速公路、轨道交通、机场、 军事禁区、边境线监控等非常多的场景。
异常行为识别-逗留徘徊检测
基于深度学习进行行人检测,并 对人进行动态跟踪,根据人的轨迹分 析,判断此人是否在一个区域内长期 反复滞留徘徊,当其逗留徘徊超过一 定时间之后,进行自动告警。
采用基于深度学习检测算法,对 视频画面内的人群密度进行监测,并 对超过指定密度的区域进行告警提示。
可用于景区、广场、火车站、轨 道交通等大客流区域人流密度进行监 测,并对人流密度超限区域进行告警。
人数统计分析-活跃度分析
采用基于深度学习的人体姿态动作 识别,对视频内的人员进行动作识别, 并对每个人员个体的活跃度进行评价, 对低于活跃度临界值或高于活跃度临界 值的人员进行告警。
示例
站立
举手
蹲
动态效果
பைடு நூலகம்录
目录
CONTENTS
1 平台基本情况
2 主要应用
1
基于深度学习的行人识别效果
示例
人数统计分析-人数统计
采用深度学习行人检测 技术,通过视频分析对指定 断面或范围内的行人进行人 数统计,可区分行人方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
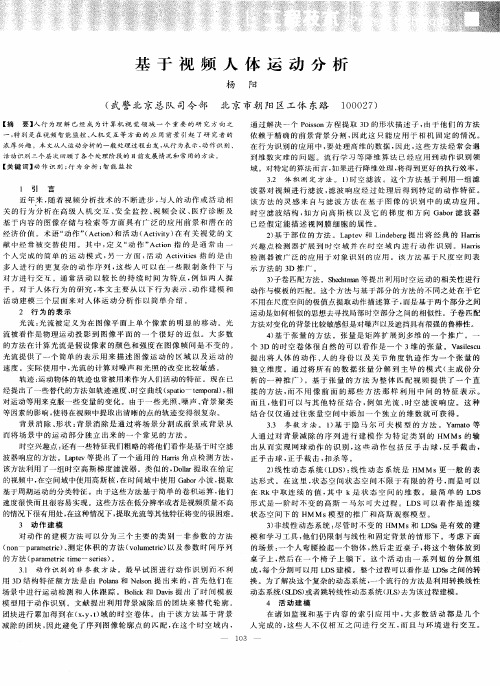
由叶1心屯标长短轴半径和眨轴的倾角,共5个参数来描述(图 2(b))。
图2(a) 肤色分割结果 图2【h1 blab分析结果
本文中使用了与【7】相类似的非参数肤色模型。该肤色模型 可以秤训练阶段通过学习得到,行根据贝叶斯央策理论对每个 象素颜色进行分类。设互斥的两个变量s.’s分别表示肤色和 非肤色,它们的先验概率分别为p(s),p(9 s)。p(xls)是颜色z属 于肤色的条件概字密度。当最大后验概率P(slx)>p(9six)时,我 们将x分类为肤色象素。根据贝叶斯定理,有:
卫堕盟:』生山丛兰垃:>1
P(sIx)P(s)P(刊j) 因此将z分类为肤色的判定法则为:
2【尘』、匹il:l卫f盟 口(z一)P(5 J P(5 J 本文采用RGB空间的离散三维直方幽来表币颜色的分布 函数。RGB空间被分割为32x32x32个小立方体.每个立方体 内的象素计数除以总象素个数表示对应其颜色的概率值。在训 练阶段,首先从一些罔片中手工标记出肤色区域。通过统计肤 色象素个数的百分比,得到P(s),通过对训练图片的肤色象素 颜色进行直方图计数并归一化得到p(xls).并保存在文件中。 背景颜色分布p(xl’s)在运行时获取。
(3)当头部倾斜雨l噪声影响造成脸部检测失败时,利用下 一节L}】介绍的区域分析方法匹配历史跟踪信息,获取脸部位置。 3.3 区域分析及关节位置推断
图2(a)是应用3.1节肤色分割算法得到的结果。从图中町 以看到头部和手臂的肤色区域都近似于椭圆形。我们使用椭圆 形状(blob)描述这些肤色区域块,便于后面的分析。每个椭圆
2系统设计 本文的目标是通过一个非定标的普通USB摄像头.存不
假设已知背景和衣服颜色的条件下,对人体上半身(头和手臂 关节),进行实时跟踪和定位(15帧,s)。被跟踪对象需要面对摄 像机.其上半身位于摄像机视野内。
相邻帧差分、轮廓、肤色是儿种常见的可以被快速提取和 处理的图像特征。在选择图像特征时,考虑到相邻帧差分特征 无法检测静止姿态;另外用来提取轮廓的减背景算法容易受到 光照变化、阴影的影响,背景也不容易获取:凼此本文采用了相 对稳定可靠的肤色特征。冉大多数情况F.肤色区域可以给出 手(或手臂)的粗略位置。由于手在低分辨率视频巾包含的象素 较少,运动到脸部附近时容易与脸部象素混淆,冈此本系统要 求用户必须霹出前臂,“提供一个较大的肤色区域。
Keywofds:upper body tracking,face detection.skin color model,probabilistie tracking
1引言 利用人体姿态来操纵计算机是一种自然友好的人机交互
方式,近年米遂渐被研究者们所重视。目前在科研和商业领域 已经有一些典型的基于人体运动捕捉的人机交互系统.如Mrr 媒体实验窀的Pfinder系统【_I。Pfinder系统使用基于颜色统计的 方法对身体的各个部分进行实时跟踪与定位,通过识别跟踪结 果判断人的行为,进而与虚拟环境进行交巨,比如控制一只虚 拟的狗。另外,随着USB摄像头的普及,近年来出现r一种基 于摄像头的游戏,其tp包括由Sony公司推出的PS2游戏 “EyeToy”系列。“EyeToy”通过摄像头捕捉玩家的身体运动,然 后使用捕捉的运动数据来操纵游戏,从而实现玩家与画面上各 种物体的瓦动。这类游戏会对玩家动作做出即时反应,增加了 游戏趣味性和参与感。另外基于人体姿态的人机交互方式也可 以用于智能家电.视频会议等其他一些领域巾。
(1)使用历史跟踪结果对当前时刻的脸部位置进行预测, 并利用预测位置将搜索区域限制在一个较小的“感兴趣区域”内, 以缩小处理范围.提高检测速度。另外在初始化阶段.仅仅在图 像的上半部分进行人脸检测。
(2)结合肤色分割信息来去除错误的脸部检测。如果输出 脸部矩形区域包含不足50%的肤色面积.则认为当前的检测结 果是错误的。
detection,skin color segd/lentation,and probabilistie tracking pmhability tracking,a∽used to track 8 person’s upper body’s motion in usual indoor environments.This system call initialize the tracking and recover frmn failure automatically,and is robust to illumination change and body self-occlusion 7Fhis syNem can be applied to several fields such as‘‘virtual reality”.‘‘video conference”.and“web一12am games”.
点
图1跟踪系统设计
3关键功能模块分析 3.1 自适应的肤色区域检测算法
肤色检测是一种常用的脸部跟踪和手臂跟踪的手段。肤色 分割算法根据使用肤色模型的不同,可以分为基丁规则的肤色 模型[61,非参数的概率肤色模型m,以及参数的概率肤色模型m几 类。其中基于规则的肤色模型和非参数的肤色模型可以被快速 计算,适台于实时跟踪的应用。
(2p)。ls‘
其中,(1)式巾的求和符号针列那些位于检测出来的脸部
区域内部.且被分割为“肤色”的那些象素进行求和。协方差矩
阵陋表示核函数的带宽。E为单位矩阵.用来控制平滑程度。
在实际计算时.(1)式被离散化,以三维直上『图的形式进行计算。
背景颜色分布P(xl’5)通过对人体包围盒以外的区域的颜色进 行统计得到。为了加快运算速度,仅仅在跟踪初始化时计算
万方数据
普通摄像头成像效果受光照、曝光度以及伽马校正的影响
较大.呈献m颜色失真,亮度变化较大的特点。本文采用一种自 动更新直方图的方法来解决光照变化,颜色失真,以及人与人 之间的肤色差异对肤色分割产生的影响。系统启动后,首先从
文件中读人p(xls),然后在后继帧中统i;r当前时刻肤色医域内 的肤色分布来逐渐更新p(xls).以反映光照以及颜色失真引起 的肤色分布变化的情况。注意判,如果使用肤色检测的分割结 果来更新肤色模型.会使得肤色模型很不稳定,因此系统采用
了一种小依赖于肤色提取的人脸检测方法来得到人脸区域,并 使用该区域内的肤色象素来更新肤色的直方图。
由于脸郎的象素个数较少,我们利用混合高斯核甬数的方 法来对腧部的肤色分布进行平滑估计,并加权到上时刻的肤 色模型中去。肤色分布的更新公式为:
p.0tx)=(1-aJP川(sIx)4-
1Ⅳ
1
r—l
畴…io——÷Tl—Tefxp(一}‘(‘1)‘S‘(t飞))(1)
基于视频的人体上半身运动跟踪系统
刘国翌“2李华1 (中国科学院计算技术研究所智能信息处理重点实验室,北京100080)
2(中国科学院研究生院,北京100039)
E—mall:gyliu@ietact,Ⅱ
摘要文章舟绍了一个可以实时捕捉人体上半身运动的系统。该系统通过结合健用人脸检测、肤色检刹和概率跟踪等 技术,利用单个普通摄像头在一般的室内环境下跟踪人体的脸部和手臂关节位置。作为一个实时跟踪系统.该系统实现 了跟踪的自动初始化以及自动从跟踪错误中性复.并且在一定程度上处理光照变化、身体自遮挡等问题。该系统可以用 于“虚拟现实”、“视颊套议”、“基于摄像头的游戏”等一些领域中。 关壁词 上半身运动跟踪 人腔捡刹 肤色楗型 概率跟踪 文章编号1002—8331-(2005)36一0068—04 文献标识码A 中国分类号TP391
基金项目:国家科技攻关计划课题奥运科技专项(编号:2001BA904808);国家973重点基础研究发展规划资助项目(编号:2004CB318000) 作者筒介:刘[N翌(1977一).男,在读博十,研究方向:计算机图形学、计算机视觉。李华(1957一),男,博上,研究员,研究方向:计算机图形学与可视化。
p
P(xl s)。 分割结束后.利用连通K域分析将所有肤色区域进行标
号.并将那些较小的肤色区域合并到邻近的较大肤色区域中 去.以处理因分割错误造成的区域断开的情况。
3.2脸部检测与跟踪
前面提到的肤色椅测算法和跟踪初始化过程都依赖于脸 部检测算法。本文使用了文献【9】中提山了基于Adaboost算法 人脸检测由法。该方法利用_迭代训练从大量的弱分类器中选取 最具有分类意义的部分组合成强分类器.来检测人脸。并构建 一个瀑布式的分类器在检测早期去除那些容易区分的非脸部 候选位置.进而加快检测速度。该人脸检测算法仅仅依赖于灰 度图像特征。直接使用该算法存在一些|bj题:该算法用于整个 图像检测.运行时间较长;只能检测止向的脸。头部倾斜或者部 分遮挡会造成检测失败;有时会在错误的位置检测出人脸。因 此,下面一些手段被用来改进【9】中算法,以实现更可靠的人脸 检测.
68 20 万05方36数计算 据机、人脸检测与跟踪、 关节位置推断、..维关节角度恢复和三维显示等几个模块。图 1给H{了水文系统设计的个图示。系统在启动后处于未初始 化状态,通过在检测人脸来判断图像中人的存在。当检测到人 腧位嚣后,系统进人初始化状态。在初始化过程中.系统通过统 计颜色信息,建立起肤色和背景的颜色分布模型,井对图像进 行肤色分割。假设初始化过程中,用户双手处于自然卜垂状态。 通过对分割结果进行区域分析.系统获取手臂长度.以及肩膀 宽度等人体测量参数。初始化成功后,存跟踪过程中.我们结合 使用人脸检测和肤色分割结果对人腧进行定位,并使用区域分 析得到手臂关节他置的候选点。最后综合关节位置的先验分布 与历史跟踪结果对候选关节进{r推断,得出当前时刻各个关节 位置。在跟踪过程中,系统使用人脆桅测的结果米更新肤色直 方图,以实现肘环境的自适麻性。对于手臂相交和重叠引起的 肤色区域缝接的情况,本文使用粒子滤波算法跟踪每个手臂。 当人聆跟踪失败时,系统进人跟踪丢失状态,任这个阶段,系统 试罔重新恢复跟踪过程。若系统处于跟踪丢失状态超过4s.则 认为跟踪失败,系统恢复到来初始化状态。