FARO-Laser-ScanArm-Techsheet_CN(激光扫描测量臂)
FARO激光跟踪仪

FARO Laser Tracker/LaserTracker/cnFARO激光跟踪仪简介应对测量挑战全世界的客户都信赖FARO激光跟踪仪,并利用它来应对日常的测量挑战以及过去无法解决的复杂难题。
重新定义效率FARO激光跟踪仪在设备校准、设备安装、部件检测、工装建造与设置、制造与装配集成和逆向工程等应用领域都缔造了突破性的效率。
增加产量通过提高工作速度、缩短停工时间、消除昂贵的废料以及获得精确、一致和值得报告的测量数据,许多公司节省了数百万美元的费用。
提供优质产品利用FARO激光跟踪仪,您可以制造出更具竞争力的产品,加快实施产品改进计划并为当今的技术市场提供高性能的产品。
三维测量两个角度编码器会测量俯仰角度和旋转角度,同时利用高精度的绝对测距仪来确定靶标的 三维位置。
该位置在软件中显示为X,Y 和 Z 值。
跟踪靶标将激光束平行反射回来,但反射回来的激光束返回至跟踪仪时会发生偏移,这时位置探测器(PSD)将计算出反射与入射两道光束之间的偏移量。
伺服电机会不断地 (每秒数千次)调整跟踪仪的跟踪头, 将两道光束之间的偏移量降至最小,从而实现高速、动态的测量。
实际应用校准• 比传统方法更准确、更省时• 重复性测量,合理的趋于失真• 通过实时测量来确定公差和验证设计逆向工程• 获取高精度的数字化扫描数据• 不再需要硬件母版工装建造• 全程精确测试(确保部件达到最高的装配标准)• 验证工装的尺寸完整性和可重复性(确定或预先防范工装缺陷)零件检测• 将复杂的几何结构、曲面和特征位置与标称数据进行比较• 不需要移动工件到固定的检测工具中• 减少生产废料和不合格产品带来的损失设备安装• 安放/调平床身• 防止机床在磨合期运行时造成的损坏• 降低设备上的零件磨损和撕裂制造与装配集成• 实时获取关键的定位反馈• 设置移动部件的标称坐标• 在移动过程中动态地持续测量,以提供定位点的数据FARO Laser Tracker Vantage小型、轻量化设计Vantage是FARO所制造的体积最小、重量最轻的激光跟踪仪,不仅具有极佳的易用性,而且便于在不同的工作地点之间进行运输。
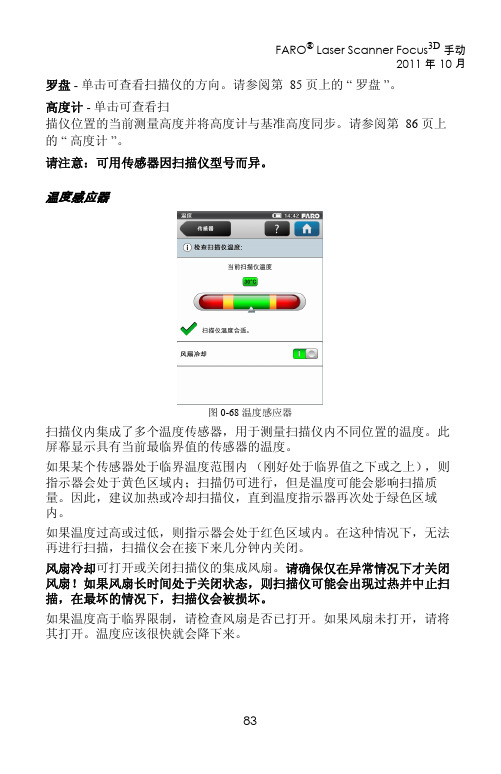
法如3d激光扫描仪技术手册2
可用替换零件
• 带电源线的供电单元 • AC 电源线
• 装运箱
LED 行为
“
启动 / 停止 ”
按钮下方的 LED
扫描仪光学镜 一侧的 LED
扫描仪传感器 一侧的 LED
扫描仪底座上 的 LED
扫描仪关闭,外部 电源未连接
关闭
关闭
关闭
关闭
扫描仪关闭,外部 电源已连接
关闭
蓝色持续亮起 蓝色持续亮起 蓝色持续亮起
扫描仪传感器 一侧的 LED
扫描仪底座上 的 LED
扫描操作激光打开 红色闪烁 红色闪烁 红色闪烁 红色闪烁
扫描操作激光关闭 蓝色闪烁 蓝色闪烁 蓝色闪烁 蓝色闪烁
错误
橙色持续亮起 橙色持续亮起 橙色持续亮起 橙色持续亮起
关机
蓝色快速闪烁 蓝色快速闪烁 蓝色快速闪烁 蓝色快速闪烁
图 0-77 LED 行为
SD 存储卡的文件结构
Focus3D SD 卡的文件结构如下所示:
图 0-78 SD 卡文件结构
Backup (备份)- 扫描仪备份会保存到此文件夹中。在启动扫描仪备份 后,会立即自动创建备份文件夹。请参阅第 78 页上的 “ 备份 ”。 Log file (日志文件)- 从扫描仪导出日志文件时,该文件会保存到此文件 夹中。此文件夹将由扫描仪自动创建。请参阅第 77 页上的 “ 日志文件 ”。 Preview (预览)- 捕获的扫描的预览图片会保存到此文件夹中。在启动扫 描后,会立即自动创建此文件夹。请参阅第 48 页上的 “ 开始扫描 ”。 Projects (项目)- 扫描项目信息会保存到此文件夹中。此文件夹将由扫描 仪自动创建。请参阅第 59 页上的 “ 管理扫描项目 ”。 Scans (扫描)- 捕获的扫描会保存到此文件夹中。在启动扫描后,会立即 自动创建扫描文件夹。请参阅第 48 页上的 “ 开始扫描 ”。 Updates (更新)- 固件更新会复制到此文件夹中。此文件夹必须手动创 建。请参阅第 81 页上的 “ 固件更新 ”。
ThePhoton120美国FARO大空间三维激光扫描仪
测量行业的革命性产品美国FARO大空间三维激光扫描仪The Photon 120三维激光扫描技术是国际上近期发展的一项革命性的高新技术。
随着三维激光扫描仪在地质、矿业、考古、工程、航空航天、汽车、地震监控等的实际应用,这种技术已经引起了广大科研人员的关注。
利用三维激光扫描技术获取的空间点云数据,可快速建立结构复杂、不规则的场景的三维可视化数字模型,还可以迅速得到任何的距离、面积、体积的测量结果,既省时又省力,这种能力是现行的三维建模软件所不可比拟的。
公司简介纳斯达克上市公司---法如科技,世界领先的三维测量设备系统及软件供应商。
法如专业从事设计、开发、推广和销售测量设备以及用来创建虚拟模型或对现有模型进行评估的专用软件。
全球已安装了超过20,000台设备,并拥有10,000个客户。
法如科技设备和软件可以满足任何精确的3D测量需求,包括部件和总成的检测、工厂规划和实际建造文件记录,以及诸如调查、重现事故和犯罪现场,具有历史意义场所的数字化保存等各种特殊应用。
法如的技术极大地缩短了现场测量时间,从而提高了生产效率。
针对不同行业的软件包能够使得用户能够快速有效地处理和显示他们的测量结果。
法如总部位于美国佛罗里达州奥兰多市,亚太总部设在新加坡;The Photon 120: 以最快速度进行大面积扫描高速三维扫描仪可对所有细节进行测量和记录!FARO Photon大空间激光扫描仪采用非接触激光技术,可以在几分钟内对复杂的环境和几何体生成非常详细的三维数据。
Photon 扫描仪在其虚拟空间内定义并重现了真实的世界。
生成的图像是用数百万次三维测量数据来精确数字化表现原物和原样。
Photon 120 扫描速度高达每秒976,000点,最长可扫描503英尺(153米),对于记录三维数据状态,它是最有效的方法。
世界上唯一的模块化的三维激光扫描系统扫描速度,:976,000点/秒58秒捕捉760万点•最高分辨率: 10m处两条垂直扫描线间距垂直方向1.5mm•视角范围:水平360度,垂直320度最大扫描距离:根据模块的不同,最大距离有20米,40米,80米,250米. 精度: 25米处3mm.•内置PC: Pentium III ,700 MHz,256 MB RAM 40GB HD •集成倾斜传感器•扫描控制: PC或PDA控制独立电源系统: 10小时供电集成设计理念: 14Kg.携带方便,手提箱和背包数字化矿山的顶级硬件设备!!1 、矿山地质2、矿山内部三维数字模型---澳大利亚比斯菲尔得金矿•当爆破后不易近距离接触时扫描•点云可以产生网格计算•普通全站仪无法实现测量3、数分钟内精确捕捉隧道内3D数据4、矿井中的爆破和体积结果分析5、其他行业应用产品特点1、世界上最快的三维大空间激光扫描仪以每秒最大976,000点的速率可扫描最长为503英尺(153米)的文档。
faro focus 指标 -回复

faro focus 指标-回复Faro Focus 指标:专业三维激光扫描解决方案引言:随着科技的不断发展,三维激光扫描已经成为现代测绘、建筑、制造以及文化遗产保护等领域的重要工具。
在许多场景中,Faro Focus 激光扫描仪以其高精度、高速度和易于操作的特点备受推崇。
本文将详细介绍Faro Focus 指标,从设备参数、扫描精度以及应用范围等多个方面来全面解读这一专业的三维激光扫描解决方案。
第一部分:设备参数Faro Focus 是一款由Faro Technologies 所开发的激光扫描仪,该设备具备多项强大的功能和特点。
首先,Faro Focus 激光扫描仪具备高速度扫描能力,在最快的模式下,每分钟可以进行一百万个测量点的扫描,快速且高效。
其次,该设备具备高精度测量能力,误差范围在毫米级别,可满足各种精细度要求。
此外,Faro Focus 激光扫描仪还配备了高清晰度相机,可以捕捉精确的彩色图像,完美地补充了激光测量数据。
第二部分:扫描精度Faro Focus 激光扫描仪在扫描精度方面表现卓越。
其扫描误差在标准测量条件下约为±2mm,这意味着在正常使用情况下,所得到的点云数据与实际物体表面几乎无差异。
这种高精度的扫描能力使得Faro Focus 在测绘、建筑和制造等领域的各种场景中得到了广泛应用。
无论是建筑测量、拓扑测绘、工业模型建立还是文物保护与重建,Faro Focus 都能准确地捕捉目标物体的几何形状和细节,实现精准测量和可视化。
第三部分:应用范围Faro Focus 激光扫描仪具备广泛的应用范围。
首先,它在建筑与建造领域中扮演着重要角色。
例如,在房屋测量中,Faro Focus 可以通过将扫描仪放置在合适位置来快速捕捉多个房间的几何结构,以创建精确的建筑平面图。
在大型建筑项目中,Faro Focus 可以进行实时监控,及时检测并纠正施工偏差。
其次,Faro Focus 也被广泛应用于文化遗产保护领域。
FARO激光跟踪仪案例一

车工专家采用FARO 激光跟踪仪(FARO Laser Tracker),只需耗费一半时间,即可达到更高精度更高智能的工程与技术往往是促进任何工业发展的关键动力。
其中,精密工程科学至今依然是制造业的复杂制造工艺的核心因素。
Self Levelling Metal Machines Pte Ltd (SLMM)正是一家精密工程公司,该公司是业务遍布全球的Self Levelling Machines (SLM)公司属下成员之一。
SLMM 创办于2000年,是Self Levelling Machines (Australia)与Metal Machines Engineering Services (Singapore)两家公司的联盟企业,公司总部设在新加坡。
SLMM 为多家公司提供巨型的原位精密车工服务,包括镗孔、铣削及钻孔等。
SLMM 项目工程师Lok Qiuquan 分享其经验时表示,“我们多数客户是来自海事与岸外工业。
我们所从事的岸外石油加工产品包括浮式生產儲油及卸油系統(FPSO)、转塔系泊系统、岸外起重機及悬链锚腿系泊(CALM)浮筒等等。
这些部件的体积非常巨大,无法放置在一般的车工中心,我们必须将设备带到客户所在地点,在现场为他们进行车削。
”SLMM 所承接的所有项目,都必须在车削工作开始前及完成后进行检验。
模拟安装、机器对准及几何尺寸检验等都是SLMM 的日常工作之一。
“这些工作需要详细测量,每次测量的条件都可能有所不同。
”Lok 表示,“测量对象可能是30毫米的小孔,也可能是直径30米的巨型结构,经常需要使用多种不同的传统仪器和手持工具。
”这些测量方法尽管效果相对良好,但是SLMM 依然在寻求效率更高的替代方法。
“由于我们的项目日益复杂,我们意识到需要改善工作流程,以防止出现瓶颈。
我们的美国伙伴向我们推荐FARO 激光跟踪仪,因为他们使用后觉得效果极好,尤其是针对需要用到圆形自调平机器(CSLMs)的项目而言。
FAROLaser Scanner Focus3DX330新型激光扫描仪:用于三维数字建档和土地测量的理想工具

沉淀 ,同时能够确保每台搅拌泵具有 相等的累计
运 行 时 间 ,确 保 了污 水池 的水 处 于 最 佳状 态 。一 旦 水 位 到 达 上 高 位 时 ,P L C就 会 启 用 干 运 转 保 护 措 施 ,使 全 部 的补 水 泵停 止 运 行 ,这样 对 水 泵 起 到 了保 护作 用 。
号 ,P L C 控制污水池 中水泵给蓄水池补水 ,直到
蓄水 池 液 面 达 到 高位 ;同时 P L C还 控 制 骨料 层 蓄 水 池 内搅拌 泵 定时搅 拌 ,避免 污水 沉 淀 。
[ 2 ]陈燕兵. 基 于P L C 及 组 态王技 术 的污水 处理 自控 系统
应 用分析 [ J ]. 工业控 制计 算机 ,2 0 1 2( 1 ) :3 6 .
j f F A R O ⑧L a s e r S c a n n e r F o c u s 。 D X 3 3 0 新型激光扫描仪:用于三维数字 j 1
;
+
建 档 和 土 地 测 量 的理 想 工具
阜
+
{
+
佛罗里达州玛丽湖 ( 2 0 1 3 年l 0 月8 日) 一 全球最值得信赖的三维测量、 成像和实现技术 供应商F A R O T e c h 一 {
ห้องสมุดไป่ตู้
, r —卜 。 - +- 。 - +- 。 - 4 -。 —卜 - +- 。 - +- 。 - 4 -。 — 卜 - 4 - - + - 。 - +- 。 - 4- 。 _ 4 - - 。 - 4 - - + - 。 - 4 - - 。 - 4 - - 。 - 4 - 。 - + - 。 - +- 。 - 4 - - 。 - + - 。 - + - ’ - +- 。 - 4 -。 — 卜 - 4 - - 。 - 4 . - 。 - 4 - 。 - + - 。 - +- 。 - F’
激光跟踪仪组装说明
如果红色指示灯持续闪烁超过15 分钟,则检查 PC 与 MCU 电源 开关旁的端口之间的以太网网线 连接。 可使用 IFM 模式或 ADM 设置的� IFM 模式进行扫描。 当将跟踪器设置为 ADM 模式时, 建议每小时运行一次 Home 命令。
应使用哪一种远景模式进行 扫描? 当将跟踪器设置为 ADM 模式时,应多长时间运行 一次 Home 命令?
2. 安装跟踪器
• 用螺丝将主轴安装到稳定的仪器架上,使 用提供的活动扳手旋紧螺丝。检查装好的 仪器架,确保仪器架稳定且牢固。� • 用手柄抬起跟踪器并将它放在主轴上。 • 转动联锁杆将主轴上紧。
6. 启动
完成所有连接后,打开位于MCU 右侧的电源。接通电 源后首次运行应用软件时,将运行 Startup Checks。 Startup Checks 等待激光稳定,需要大约 10 分钟,然后 初始化跟踪器。
3. 连接系统
警告:在正确连接好所有线缆之前,不要
接通系统中任何部件的电源。 • 将 30 英尺通信线/电源线与跟踪器头 ( 底部)和 MCU ( 左侧)连接。 • 将提供的以太网网线从 MCU 的右侧连接 至 PC 以太网端口。 • 将远程气温传感器连接至MCU 温度 端口 1。 • 将MCU 电源线连接至MCU 和 120 或 240 伏交流电源。建议在电源和跟踪器之 间使用不间断电源( UPS)。
FARO 激 光 跟 踪 器 组 装 说 明
包装箱2
1. 拆开系统包装
• • • • • • • 跟踪器头 主控单元(MCU) MCU 电源线 30 英尺通信线/电源线 以太网网线 远程温度传感器 带活动扳手的主轴
5. 计算机配置
FARO 激光跟踪器需要以下配置:奔腾 III PC、运行� Windows 2000 或 Windows XP 及带有以太网卡。 • 只应启用一个以太网卡。 • TCP/IP 设置应设置为静态地址 128.128.128.1,子网 掩码为 255.255.255.0. • 激光跟踪器的 IP 地址为128.128.128.100。直接连接 激光跟踪器需要提供的绞接以太网网线和 RJ-45 插头。
faro激光跟踪仪工作原理解析资料讲解
❖ 2环境因素
温度、气压、气流的波动、空气污染将影 响光线的传播,导致测量误差的增大;地板的 稳固程度、振动、设备用电电流的稳定性不但 会造成测量误差的增大,甚至会造成仪器的损 坏。针对以上因素,测量时应控制室内温度恒 定,不要把仪器摆在厂房门口、空调旁边。保 持空气清洁,不要把仪器摆放在地板接缝处或 地基不牢处,避免测量区域附近有振源,配置 稳压器。
2
3
4
测量的难点及解决措施
❖ 1.坐标系的建立
❖
飞机具有外形尺寸及重量大、外部结构特殊、部
件之间相互位置关系要求严格等特点。而激光跟踪仪
则要求一个站位内测量点光线直线可达, 不可断光再续,
且中间不能有障碍物, 但在飞机上的水平测量点大部份
是对称分布, 比如机翼、平尾的安装角就需要测量机身
左右的坐标点, 由于中间被机身、起落架或其他挂载挡
11
1 测前准备工作
(1)考察测量现场; (2)跟踪仪设置; (3)作出测量汁划
12
2 建立工装坐标系
确定测量坐标系可采用两种 方式。一种方式采用迭代法建立 坐标系,可在被测表面拾取多个 基准点,然后计算生成坐标系坐 标原点。所选6个基准点建立了 该表面的测量坐标系 6个基准点 分布另一种方式是采用外加基准 板或采用飞机制造基准面方式确 定测量坐标系,在基准板或飞机 制造基准面上选取三个以上基准 点进行测量坐标系建立。如果是 对整个机身测绘,要进行内外表 面全部的多角度多方位测量,则 采用第一种坐标系建立方式;若 要测量的型面仅是飞机的部件, 则采用第二种坐标系建立方式
7
影响因素
❖ 激光跟踪仪通过优化测量方式可以完全实现全机的水 平测量工作, 提高了测量效率、精度及可靠性, 具有操 作简单、人为干扰因素少、多次测量差异性小等特点, 但也有一些影响误差的因素。如:
1Faro 跟踪仪的基本操作与规范
Faro 跟踪仪的补偿和使用步骤一、Faro跟踪仪的补偿概述:如所有其它高精度仪器一样,必须定期检查 FARO 激光跟踪器。
补偿在必要时能够测试跟踪器和调节参数。
补偿能够修正激光跟踪器的误差,在跟踪器交付后或受到碰撞后需要进行现场补偿操作。
1.自动补偿自动补偿是一种完全自动化程序,也是补偿跟踪器的主要方法。
该程序纠正角度测量误差。
命令:设备---硬件配置--- CompIT主菜单按钮“自动补偿”按钮开始程序。
该过程完成(大约需要5分钟)后,跟踪器位于定向精确度规范内-做好测量准备。
2.后视自动补偿程序运行完成之后,检查后视误差以验证精确度。
命令“后视”,将Faro跟踪仪1.5”SMR置于鸟巢和测量范围内的几个位置,最后点击继续按钮,以确定Faro跟踪仪的后视精度是否通过。
3.Faro跟踪仪经过长途运输或长时间工作之后,经过自动补偿也许不能通过后视精度验证。
此时就需要作定向补偿。
定向补偿包括两个过程:中间测试和定向补偿。
1).中间测试是把1.5”SMR置于电脑屏幕提示位置进行测量,当SMR置于提示位置时,屏幕上的实际值显示绿色,并计算后视误差。
测量之后,跟踪器测试将通过或失败。
包括以下三个位置:• 方位角 90 度、顶点角 90 度、距离 6 米。
• 方位角 -45 度、顶点角 90 度、距离 2 米。
• 方位角 45 度、顶点角 135 度、距离 2 米。
2).中间测试完成之后,请选择“继续”按钮以进行定向补偿。
同样地,把1.5”SMR置于电脑屏幕提示位置进行测量,其中包括以下几个位置:• 任意方位角、顶点角 90 度、距离 2 米。
• 任意方位角、顶点角 90 度、距离 3.6 米。
• 任意方位角、顶点角 90 度、距离 5.2 米。
• 任意方位角、顶点角 90 度、距离 6.8 米。
• 任意方位角、顶点角 90 度、距离 8.4 米。
• 任意方位角、顶点角 90 度、距离 10 米。
完成最后的测量后,按“继续”按钮。
FARO三维激光扫描仪+SENCE+软件产品
输入及输出 • 地理位置参考控制点 (.cor, .csv) • 扫描点 (FARO Scan, FARO Cloud, .dxf, VRML, .igs, .txt, .xyz, .xyb, .pts, .ptx, .ptc, .ptz [仅用于输入], .pod [仅 用于输出]) • CAD 文本 (.wrl [输入、输出], .igs and .dxf [仅为输出] ) (.jpg) • 在线数据的转换成FARO Cloud用于AutoCAD 建立工作去 • 扫描&CAD物体 • 适合于对球面、立方体、平面的可视指标的物体(包括自动 化边界检测) • 筛选 • 测量 • 结构视图的直接用户界面 视图 • 3D视图 • 平面&快速视图 • 彩色扫描及黑白扫描 • 显示CAD对象 • 打印预览 • 用色彩梯度变化描述来显示从参考的平面或扫描点出发的点 间距
• •
工厂计划/ 工厂自动化 市场、广告和计算机图形
系统要求 • Microsoft Windows XP (专业版,SP2或更高) • 至少1GHz PII处理器 (建议用2.5GHz ) • 1GB内存(建议用2GB)
• • •
配有两个按钮和滚轮的鼠标 128MB显卡,具OpenGL硬件加速功能 网卡
3D视图 允许被扫描的环境进行直觉地“理解”。 显示扫描数据的同时,也显示测量结果, 计算得出的目标以及导入的CAD数据。
扫描数据的有效处理和管理
FARO Scene是专为FARO激光扫描仪开发的软件。利用全新自动目标识别、扫描 注册以及定位功能,Scene能够高效而且简便地处理和管理扫描数据。 参考对象会被自动探测并分配。根据要求,对每一位扫描位置可以在空间和地理 上进行定位。Scene也能够赋予扫描结果以色彩。软件是非常易于操作的,并且 能够通过使用最少的人工来生成高质量的数据。你唯一需要做的就是最后检验结 果。 一旦Scene准备好了扫描数据,你就可以立刻开始评估以及处理数据。Scene可 以提供您广泛的、简便易用的功能—简单的测量、3D显像、筛选以及输出数据至 不同的点云和CAD格式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精度更高、性能更强、重量更轻
常见应用
特点
全新的Faro 三维激光扫描测量臂V3
适用于检测、逆向工程 、快速成形、3D 建模。
用户可以用测量臂的硬测头来精确采集点,再用激光扫描头获取所需的大量点云数据,无需增加或更换附件,无需解开电源线, 也无需从其他CMM 输入数据。
可与逆向工程软件如 Geomagic, Polyworks, Rapidform 和其他第三方软件包一起使用的Faro 三维激光扫描测量臂V3,能助您更快速地将产品投放市场。
扫描头定位,可实现更好的人机工程以及无阻碍的硬探测
交替使用激光扫描头和硬测头 激光扫描可达每秒19,200点
无中间软件运行
航空 : 逆向工程、校准、工件检测汽车 : 工装和校准、对齐、工件检测金属制造 : OMI 、手件检验、定期零件检验模具/工具和冲模 : 模具及冲模检验、样件扫描
完全整合的七轴模式激光扫描仪无需复杂的连接线或连接装置
新 — 加快50%的热稳定时间
较 V2 只用一半时间,即可及时捕捉高质量数据
新 — 精度提高 30%
与三维激光扫描测量臂V2系列相比 ,此设备的精度提高了30%
新 — 小巧,轻便的设计
三维激光扫描测量臂V3系列测头,在重量和尺寸上较 V2 缩小了30% 新 — 符合人体工学设计的可拆卸式手柄提供舒适的无应力应用
新 — 提高了物体表面扫描的性能在扫描黑色和高反光材质时无需喷显影剂,提供了更好的表面扫描性能
量臂的蓝牙技术相兼容
/FaroArm/cn
硬件规格
认证: MET (UL, CSA Certified) • CE Compliance • Directive 93/68/EEC, (CE Marking)
• Directive 89/336/EEC, (EMC) • FDA CDRH, Subchapter J of 21 CFR 1040.10
测量电力装置、控制与实验室使用;
EN 61010-1:2001, IEC 60825-1, EN 61326
电力兼容(EMC )
EN 55011, EN 61000-3-2, EN 61000-3-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61000-4-8, EN 61000-4-11
操作温度: 10°C 至 40°C (50°F 至 104°F)温度变化量: 3°C/5min. (5.4°F/5min.) Max 湿度: 0 - 95%,无冷凝; 电源: 全球通用电压 85-245VAC, 50/60 Hz
系统性能 (非接触式)
扫描头V3规格
精确度: 0.0014” (35µm)
重复性:
0.0014” (±35µm, 2σ)最近(小)扫描距离: 3.75” (95mm) 扫描深度: 3.35” (85mm) 有效扫描宽度: 近距: 1.34” (34mm)
远距: 2.36” (60mm)
测量频率: 640 点/线
扫描速度: 30 帧/秒
30fps x 640点/线=19,200点/秒
激光: 660nm 、CDHR 等级II/IEC 等级2M 重量: 370g
系统性能 (接触式)
全球总部:美国 - Lake Mary, Florida 32746 | 欧洲总部:德国 - Lingwiesenstr
. 11/2 · 70825 Korntal-Münchingen
04REF101-018.pdf
Revised: 2 August 2013
© 2013 FARO | FARO and the FARO Logo are registered trademarks of FARO Technologies Inc. All rights reserved.。