虚拟样机仿真与测试实验
基于Pro/E的装载机工作装置虚拟样机与仿真分析
关键 词 :装 载 机 ; 工 作 装 置 ;虚 拟 样 机 ;仿 真
文 献 标 识 码 :A
0 引 言
P r o / E n g i n e e r是 一 款 包 括 C AD/ C AM/ C AE 的 大型设计 软件 [ 1 ] , 其 不 仅 可 用 来 建 立 相 应 的几 何 模 型, 而 且还可 对模 型进 行仿 真模 拟 , 并 对仿 真模 拟 的结 果 进行 分析 , 以及 时发 现设计 中所存 在的 问题 , 从 而 在 设 计 阶段就 解决 这些 问 题 , 以减 少 生 产及 投 入 使 用 后 的维修 费用 , 这不 仅有 利于 企业 经济 效益 的提 高 , 而 且 减 少 了设计 所耗 费的 时 间。
收 稿 H期 :2 0 1 3 — 0 6 — 2 4 ;修 回 } ] 期 :2 0 1 3 0 8 — 2 4
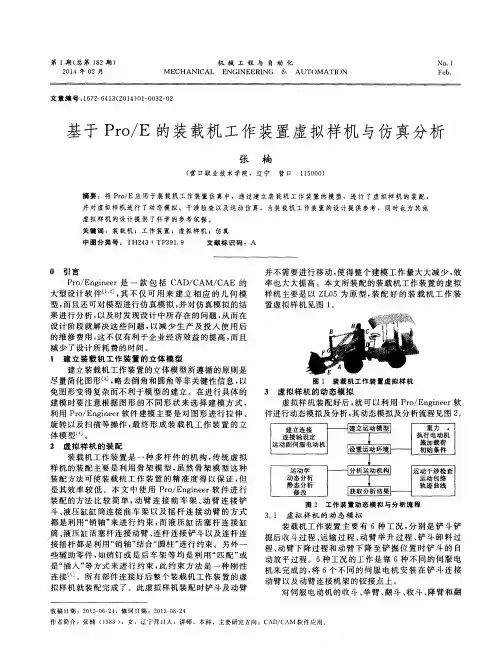
图l 装 载 机 工 作 装 置 虚 拟 样 机
3 虚拟样 机 的动态模 拟
虚拟 样机装 配 好后 , 就 可 以利 用 P r o / E n g i n e e r 软 件进行 动态模拟及分析 , 其 动态模拟及 分析流程见 图 2 。
作 者 简介 : 张椭 ( 1 9 8 3 一 ) , 女 ,辽 宁营 口人 ,讲 师 ,本 科 ,主 要 研究 方 向 :C AD/ CAM 软 件应 用 。
建立连接 连接轴设定 运 动副伺服 电动 机
建立运动 模型
设置运动 环境 分 析运动机构 获取分析结 果
重 力 . 执 行电动机 旌加 载荷 初 始条件 运动干 涉检查 运 动 包 络 轨迹 曲线
运 动 学 动态分 析 静态 分析 修 改
港机虚拟样机动力学仿真分析
样机 模型 。借助 A a 对虚 拟样机 的金属结 构 、大车 、小 车 、起 升机 构等关键 部件进 行了多 d ms
种 工况 的模 拟试验 。得到 了港机工作过 程中各主要部件 的动力学数据 ,为 实现 港机的动态设计
提供 了重要的参考依据 。
关键 词 :港 口桥 式起重机 ;虚拟样机 ;非线性动力学 ;数值 仿真
T dO (
其 中K 刚度 系数 ; △一 碰 撞 物 体变 形 量 ,或 一 者 为 侵入 深 度 ;E 渗 透 深 度 的指数 ,简称 刚性 指 一 数 ;D一 阻尼 系数 ;6 两 个物 体 的相对 速 度 。 一 用阶 跃 函数s p函数 表 示黏 性 阻尼模 型 ,其 阻 t e 尼 系数 的 计算 公式 为 :
分 别为 两物体 材料 的泊松 比:E ,E 分 别为 两接 触 。
物 体材 料 的杨 氏模量 。
式 中C 风 力 系数 , 风 力 系数 表 可 查 阅 有 关 厂
手册 ;V 一 设 计 风 速 ,初 步 设 计 时 取2 m/;A 0 s 一
结 构 部 分 有 效 迎 风 面 积 。 风 载 荷 方 向 的 确 定 采 用Ad ms 供 的S GN函数 , 其 格 式 为 S GN( , a 提 I I X1
X2 , 是 个 符 号 函数 。 当X ) 0 ,S GN函 数 返 时 I 回 的 值 为 X1 当 X, 0 , S GN函数 的 返 回 值 ; < 时 I
为一 。 X1
1 多刚体系统动力学方程 . 3
运 用 拉 格 朗 E 方法 ,建 立 钢 丝绳 以外 的其 他 t 部 件 的多 刚体动 力 学模 型 。
P :6
厂 .
12 风 载荷 .
基于虚拟样机的仿真系统校核、验证与确认研究
关键词 : 虚拟样 机 ; 机仿 Байду номын сангаас; 计算 校核 、 验证 和确认
中图分类号 : P 9 . T 3 19 文献标识码 : A
Ve i c t n,Vai a i n a d Ce t c to s d o rf a i i o l to n ri a i n Ba e n d i f
Vit a r t t p i lto y t m r u lP o o y e S mu a in S se
W U Da—l MA J —s e g L e i n. i h n IW i
( rnn eE gne n o ee S iah agH b i 5 0 3 C i ) O d ac nier gC l g , hj zun e e 00 0 ,hn i l i a
( 军械工程学 院, 河北 石 家庄 00 0 ) 5 0 3
摘要 : 虚拟样机模 型的正确性 和精确度直接影响到仿真的置信度 , 如何保证 建立的计算机仿 真模 型的正确性 是虚拟样 机建 模的一个重要 问题 。首先对虚拟样机技术 的特点及其仿真步骤进行了描述; 然后 , 在介绍仿真系统校核 、 验证与确认 概念的 基础上 , 了分布交互仿真 系统校核 、 讨论 验证与确认的原则 ; 根据虚拟样机的特点 , 研究制定 了虚拟样机仿真 系统 的校核 、 验 证与确认 的七 步过程 , 重点对 虚拟样 机仿真 系统的模型验证方法进行 分析 ; 最后 , 出了的虚拟样机校核 、 证与确认 过程 提 验
ABS TRACT: h ai i n c u a y o i u lp ooy e mo e f cs t e c n d n e o i l t n d r cl T e v l t a d a c rc fvr a r ttp d laf t h o f e c fsmu ai i t d y t e i o e y,a d n
某高炮自动机虚拟样机仿真
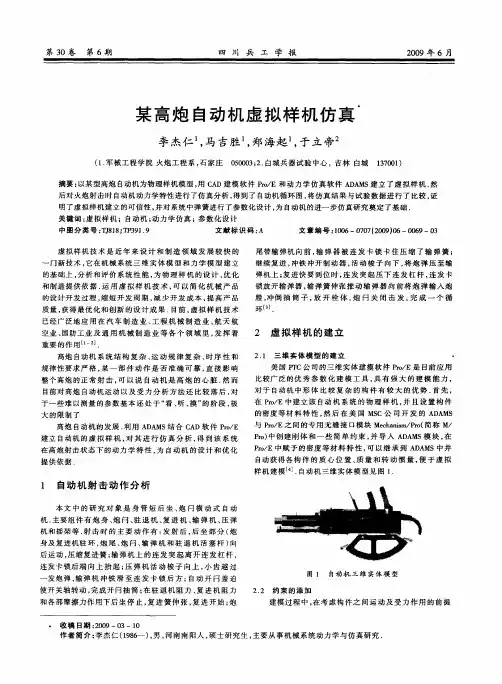
摘要 : 以某 型高 炮 自动 机 为 物 理样 机 模 型 , C D建 模 软 件 P / 和 动 力 学 仿 真 软 件 A A S建 立 了虚 拟 样 机 . 用 A o rE DM 然 后 对 火炮 射 击 时 自动 机 动力 学 特 性 进 行 了 仿 真分 析 , 到 了 自动 机 循 环 图 , 得 将仿 真 结 果 与 试 验 数 据 进 行 了 比较 , 证
空 业 、 防工 业 及 通 用 机 械 制 造 业 等 各 个 领 域 里 , 挥 着 国 发 重要的作用_ J 1 . 高炮 自动 机 系 统 结 构 复 杂 、 动 规 律 复 杂 、 序 性 和 运 时 规 律 性 要 求 严 格 , 一 部 件 动 作 是 否 准 确 可 靠 , 接 影 响 某 直 整个 高 炮 的正 常 射 击 , 以 说 自 动 机 是 高 炮 的 心 脏 . 而 可 然 目前 对 高炮 自动 机 运 动 以 及 受 力 分 析 方 法 还 比较 落 后 , 对 于 一 些 难 以测 量 的参 数 基 本 还 处 于 “ 、 、 ” 阶 段 , 看 听 摸 的 极 大 的 限制 了 高 炮 自动 机 的发 展 . 用 A A S结 合 C D软 件 Po E 利 DM A r/ 建 立 自动 机 的 虚 拟 样 机 , 其 进 行 仿 真 分 析 , 到 该 系 统 对 得
膛 , 倒 抽 筒 子 , 开 栓 体 , 闩 关 闭 击 发 , 成 一 个 循 冲 放 炮 完
环[
.
质量 , 获得 最优 化 和 创 新 的设 计 成用 在 汽 车 制 造 业 、 程 机 械 制 造 业 、 天 航 工 航
门新 技 术 , 在 机 械 系 统 三 维 实 体 模 型 和力 学 模 型 建 立 它
多学科系统级虚拟样机建模与仿真技术
多学科系统级虚拟样机建模与仿真技术本文从当前产品设计过程对多学科联合仿确实需求出发,分析了产品协同设计对仿真技术三个层次的功能需求,并引出当前实现多学科集成仿确实通常方法。
多学科联合仿真需要操纵、机构、有限元等不一致仿真环境的集成与数据交换,MSC.Software提供最为系统与完整的多学科协同仿真开发环境,本文全面介绍了MSC.Software多学科系统级虚拟样机建模与仿确实解决方案,并给出了具体的实例。
1.多学科联合仿确实需求众所周知,现代产品的研发流程是多人团队、多学科领域的协同设计过程。
在产品开发过程中,不管是系统级的方案原理设计,还是部件级的全面参数规格设计,都涉及到多个不一致的子系统与有关学科领域,这些子系统都有自己特定的功能与特殊的设计方法,而各子系统之间则具有交互耦合作用,共同构成完整的功能系统。
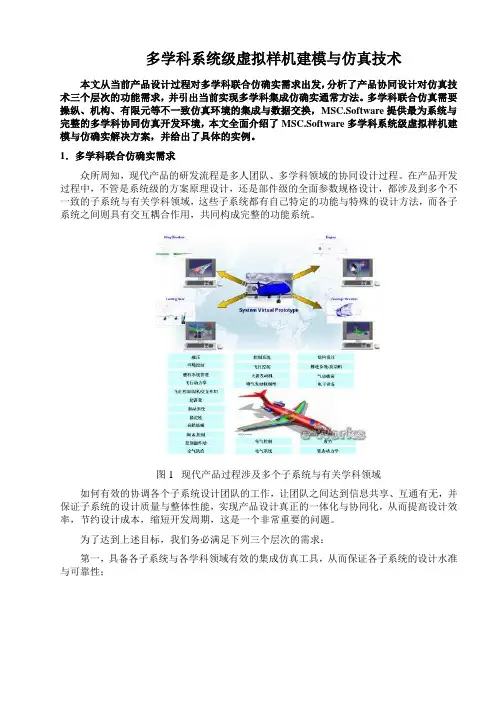
图1 现代产品过程涉及多个子系统与有关学科领域如何有效的协调各个子系统设计团队的工作,让团队之间达到信息共享、互通有无,并保证子系统的设计质量与整体性能,实现产品设计真正的一体化与协同化,从而提高设计效率,节约设计成本,缩短开发周期,这是一个非常重要的问题。
为了达到上述目标,我们务必满足下列三个层次的需求:第一,具备各子系统与各学科领域有效的集成仿真工具,从而保证各子系统的设计水准与可靠性;图2 各学科领域的不一致设计工具第二,能够实现各仿真工具之间的无缝集成与数据交换,在统一架构下实现模型整合;第三,为了能够协调与管理各设计团队,与在设计过程中产生的大量数据,实现资源优化配置,还务必具有仿真数据与流程的管理平台,实现各学科领域的真正协同仿真。
2.多学科协同仿确实通常实现方法目前较为通用与流行的实现多学科集成仿确实方法要紧包含下列三种:2.1 联合仿真式(Co-Simulation)联合仿真式是目前较为通用,也是使用最多的一种数据交换方式,其数据交换原理如图3所示,两个不一致仿真工具之间通过TCP/IP等方式实现数据交换与调用。
机械设计中的仿真和虚拟样机技术

虚拟样机技术:在计算机上建立产品的三维模型,进行仿真分析和优化设计
作用:提高产品设计效率,减少物理试验成本,优化产品性能
应用领域:广泛应用于汽车、航空、航天、电子、机械等各个行业
与传统设计方法的区别
仿真和虚拟样机技术可以减少物理原型的制作,降低成本
仿真和虚拟样机技术可以提前发现设计中的问题,提高效率
船舶维护:通过虚拟样机技术对船舶进行维护和维修,提高维修效率和准确性
机械装备
汽车行业:仿真和虚拟样机技术用于汽车设计和制造,提高效率和准确性
航空航天行业:仿真和虚拟样机技术用于飞机、火箭等设备的设计和制造,提高安全性和可靠性
船舶行业:仿真和虚拟样机技术用于船舶设计和制造,提高效率和准确性
工程机械行业:仿真和虚拟样机技术用于挖掘机、推土机等设备的设计和制造,提高效率和准确性
仿真和虚拟样机技术人才短缺:需要加强人才培养,提高技术应用水平
仿真和虚拟样机技术的发展趋势和未来展望
6
智能化仿真技术
发展趋势:从传统的手工仿真到智能化仿真
应用领域:机械设计、航空航天、汽车制造等
未来展望:更加智能化、高效化,实现真正的虚拟制造
技术特点:自动化、智能化、高效化
云仿真技术
应用场景:复杂系统仿真、多学科优化设计、实时仿真
虚拟样机技术的优势:可以提高产品设计效率,降低成本,缩短研发周期
仿真和虚拟样机技术的应用场景
3
汽车行业
汽车设计:仿真技术用于优化汽车设计和性能
汽车制造:虚拟样机技术用于模拟生产过程,提高生产效率
汽车测试:仿真和虚拟样机技术用于模拟各种驾驶条件和环境,提高测试效率和安全性
汽车维修:虚拟样机技术用于远程诊断和维修,降低维修成本和时间
2020—2021学年第1学期虚拟样机仿真大作业石油大学
项目一:游梁式抽油机某游梁式抽油机模型见图1。
该抽油机减速箱为两级减速,有三根轴和两组齿轮组成。
各齿轮的参数见表1。
抽油机冲次为3次/分,抽油机运行时从当前位置向下移动。
试进行如下分析:(每小题10分,共计40分)a.分别分析两个配重与四个配重无悬点载荷条件下输入轴的扭矩大小,绘制其扭矩变化曲线,并分析电机做正功与负功的区间。
b.悬点载荷上冲程为8吨,下冲程为6吨时,分析两个配重与四个配重条件下输入轴扭矩变化,绘制变化曲线。
c.根据上述结果,试分析配重变化与悬点载荷变化对扭矩的影响。
d.绘制四个配重施加悬点载荷条件下驴头沿竖直方向的速度变化曲线。
题图1 游梁式抽油机模型图题表1 减速箱齿轮参数序号名称齿轮模数齿数传动比1 高速传动端输入轴齿轮8 174.88 中间轴大齿轮8 832 低速传动端中间轴小齿轮8 206.5 输出轴齿轮8 130问题解答1. 问题a1.1 创建模型(1)导入模型按照图示步骤,导入相关模型。
(2)简化模型先对各个零部件进行重命名,然后再进行模型的简化。
在进行模型简化时,需要通过布尔运算将两个无相对运动并且有接触的部件进行布尔操作。
简化后如图:1.2添加约束(1)固定副按照图示过程,在连接中选择固定副。
考虑系统整体的运动过程和规律,确定相对于地面不发生运动的部件及各部件相互之间没有相对运动的部件,创建固定副。
(2)旋转副在左侧的图标中选择旋转副,默认的就是2 Bodies-1Locations,依次选择第一个body 和第二个body,然后选择旋转副的位置,即可创建旋转副。
确定旋转副位置时注意要选择中心位置。
图示左半部分为创建过程,右半部分为创建完成后的旋转副。
(3)齿轮副由齿轮副的命令窗口可以看出,齿轮副实际上是在确定的位置上(common velocity maker)、于两个相对于大地的旋转副之间创建的,所以我们在上文建立了齿轮轴与大地之间的的转动副。
再创建同速标记点。
电子设计中的虚拟样机与仿真技术
模拟电路行为
01
通过虚拟样机,可以在设计阶段模拟电路的行为,预测其性能
参数,如功耗、延迟和吞吐量等。
优化系统性能
02
基于性能预测结果,可以对电路设计进行优化,提高系统的整
体性能。
降低开发成本
03
在物理样机制作之前发现问题并进行优化,可以减少物理样机
快速原型制作
通过虚拟样机技术,设计师可以 在早期阶段发现和纠正设计中的 问题,减少后期修改和返工。
优化设计参数
仿真技术可以帮助设计师在虚拟 环境中测试不同参数组合,选择 最优设计方案,提高产品性能。
减少物理原型
通过减少或消除物理原型的需求 ,可以节省时间和成本,同时降 低对实物资源的依赖。
降低开发成本与风险
特点
虚拟样机技术具有高效、灵活、可重 复性等优点,能够缩短产品开发周期 ,降低开发成本,提高设计质量。
虚拟样机技术的应用领域
机械工程
在机械工程领域中,虚拟样机 技术常用于汽车、航空航天、 船舶等复杂系统的设计和优化
。
电子工程
在电子工程领域中,虚拟样机 技术可用于集成电路、电子系 统、微纳器件等的设计和仿真 。
03
系统级仿真技术在系统架构设计、性能分析和优化 等方面具有广泛的应用。
物理级仿真技术
01
物理级仿真技术用于模拟物理现象,如电磁场、温度场和 流体动力学等。
02
物理级仿真通常使用有限元分析(FEA)、有限差分分析(FDA) 等方法,通过建立物理模型并运行仿真来预测实际物理现象。
03
物理级仿真技术在产品性能预测、优化和可靠性分析等方 面具有广泛的应用。
的制作数量和测试成本。
电路板设计优化
布局与布线优化
机械设计中的模拟和虚拟样机技术
模拟和虚拟样机技术:通过计算机模拟和虚拟样机技术,可以在设计阶段就发现并解决问题,提高设计效率和质量。
模拟和虚拟样机技术:可以实时修改和优化设计,减少设计周期和成本。
传统设计方法:修改和优化设计需要重新绘制和制作模型,耗时耗力。
传统设计方法:通过手工绘制和制作模型,耗时耗力,容易出现错误和遗漏。
未来发展前景:随着虚拟现实和增强现实技术的不断发展,其在机械设计中的应用将更加广泛和深入,为机械设计带来更多的创新和突破。
应用趋势:虚拟现实和增强现实技术将在机械设计中逐渐普及,成为机械设计的重要工具和手段。
感谢观看
汇报人:XX
1
模拟和虚拟样机技术的概念
2
定义和作用
模拟和虚拟样机技术:通过计算机模拟和虚拟技术,对机械设计进行仿真和优化。
作用:通过模拟和虚拟样机技术,可以提前发现设计中的问题,提高设计质量和效率,降低成本。
应用领域:广泛应用于汽车、飞机、船舶、建筑等领域的机械设计中。
定义:模拟和虚拟样机技术是一种利用计算机技术对机械设计进行仿真和优化的方法。
模拟和虚拟样机技术可以帮助设计师优化机械设计的安全性和可靠性
预测和预防故障
模拟和虚拟样机技术可以预测机械部件的磨损和损坏
通过模拟和虚拟样机技术,可以提前发现潜在的设计缺陷和故障隐患
模拟和虚拟样机技术可以帮助设计师优化机械设计,提高机械性能和可靠性
模拟和虚拟样机技术可以降低机械设计的成本和周期,提高生产效率
未来发展前景和应用趋势
6
智能化和自动化的模拟技术
智能化模拟技术的发展趋势:更加智能化、自动化和集成化
自动化模拟技术的应用领域:机械设计、制造、控制和优化等方面
智能化模拟技术的优势:提高设计效率、降低成本、提高产品质量
HEV动力合成装置的虚拟样机建模与仿真
入之 间 的转 换 。此 外 , 动 机 的转 矩 与 作 用在 齿 圈 发
上 的转 矩是 成一 定 比例 的 , 到驱 动轴 上 的转 矩 是 传 由齿 圈上 得 到 的转 矩 与 发 动 机 输 出 转 矩 合 成 而 得 到, 2个 动力 总成 之 间的转 速分 配较 为灵 活 , 以有 可 非 常灵 活 的控制 策 略 , 实 现对 混 合 动 力 能量 流 的 可
收 稿 日期 : 0 9一1 ~2 20 0 6
要建 立 动 力合 成 装 置 的 虚拟 样 机模 型 , 要 先 需 建立 机械 系统 的 三 维 模 型 。 由 于 ADAMS软 件 在
三维 造型 方 面的功 能 较 弱 , 得 到 精 确 的机 械 系统 为 模型 和提 高仿 真计算 的精度 , 采用 S l Wok 软 件 oi r s d 进行 系统 的三 维建模 。
dif r nta a e a y e r t be f e e i lpl n t r g a s O us d, a c m — e nd o plt s t e 3D od lo h ow e o ee h m e f t e p r c upl nd is i ng a t v r u la s m b y i ldW o ks s t a e it a s e l n So i r ofw r .T h n t e he
pln o ks v r e 1 i g w r e y w l. Ke wo ds if r n i l y r :d fe e ta plne a y a t r ge r ;d t a s aa e c a e; it l o l it las e b y; i ul~ x h ng v r ua m de ;v r ua s m l sm a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虚拟样机仿真与测试实验
实验目的
了解ADAMS软件的建模和分析方法;
初步掌握ADAMS进行机构参数化建模的方法;
初步掌握ADAMS添加运动约束、运动驱动、仿真分析、参数测量。
实验参数
图所示为某机器的曲柄滑块机构,圆盗1以n= 60r /min的转速逆时针旋转,
在滑块的端部作用有载荷F, F的方向与滑块运动的方向相反。
已知:圆盘1的半径R
=350mm 厚度3= 100mm 材料密度为7. 8X 10-3kg /cm3;连杆 2 长度L = 1100mm 宽度w= 150mm 厚度3= 50mm 质量Q= 65kg,惯性矩Ixx = 0.132kg - m2 Iyy = 6.80kg - m2 Izz = 6.91 kg • m2,滑块3长度L= 400mm高度h= 300mm厚度3 = 300mm材料为黄铜。
试进行以下的建模和分析:
1)确定滑块酌位置、速度和加速度。
2)裁荷F=l00kN时,确定所需的圆盘驱动力矩;3)设置驱动力矩,测量滑块的位置和速度。
实验结果
时间一位移曲线
piston Displacement —piston Cl/ Position X u
i g
E ) §匸^
10 15 2.Q 2.5 Analysis Last^Run
Time (sec) 2012-04-12 11:18 16 时间一速度曲线
piston CM Velpcity X 「me 底匸) 2012-04-12 11 18:16 T
-P
Z-.」
.H
D
一
:2r .--J -l Analysis Last_Run
时间一加速度曲线
F o
a
s A s OJ E )匸口曾」E -piston CM Ac cetera!bon X 100 5.0 0.0 ■5 0 -10.0 ■15.0 -20.Q pistonpump 1 0 1 5 2Q 2 5 Trneisec) QQ 0 5 "Tknalvsis La5t Run 2012-04^12 11 18 16 时间一驱动力矩曲线 pistcnpump —MOTION 1 TZ 」£q>E
・c
□
舊
匚
四、数据分析
用MATLAB计算得到的图形:
通过对比图形和数据,不难发现:ADAMS中计算的滑块位移与MATLAB中计算的略有不同,每个时间点比MATLAB中滑块位移大0.05m,产生这种差别的原因可能是用MATLAB
计算时是以杆1为主动轴计算的,而用ADAMS计算时是以质心计算的。
两种软件中计算的速度、加速度随时间变化曲线基本一致。
因此,两种计算结果没有太大差异。
五、收获和体会
通过本次实验、我初步掌握了ADAMS的基本用法,也在实验中提高了自己的自学能力。
并在与MATLAB的数值比较中对曲柄滑块的运动规律有了更深的了解。