哈工大机械设计基础大作业一
哈工大机械原理大作业1 连杆机构运动分析 牛头刨床 学号5号
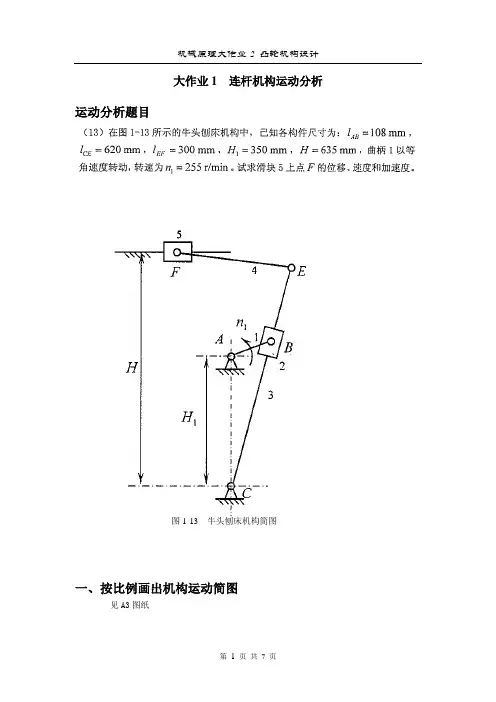
大作业1 连杆机构运动分析运动分析题目图1-13 牛头刨床机构简图一、按比例画出机构运动简图见A3图纸二、机构的结构分析及基本杆组的划分(1)机构的结构分析该机构为平面连杆机构,活动构件数n=5;有A、B、C、E、F五个转动副和B、F两个移动副,没有高副,故低副数PL=7,高副数PH=0。
机构的自由度F=3n-2PL-PH=3*5-2*7=1。
机构有确定运动轨迹。
(2)基本杆组的划分图1-13中,原动件构件1为Ⅰ级杆组,移除之后按照拆杆组法对机构进行拆分,可得由滑块2和杆3组成的RPRⅡ级杆组,以及由杆4和滑块5组成的RRPⅡ级杆组。
拆分图如下:图1-13-1 Ⅰ级杆组图1-13-2 RPRⅡ级杆组图1-13-3 RRPⅡ级杆组三、各杆组的运动分析数学模型图1-13-1 Ⅰ级杆组 x B =x A +l AB cos ϕy B =y A +l AB sin ϕ图1-13-2 RPR Ⅱ级杆组 x E =x B +(l CE -s)cos ϕj y E =y B +(l CE -s)sin ϕjϕj =arctan(B 0/A 0)A 0=xB -x CB 0=y B -y CS =2020B A + 图1-13-3 RRP Ⅱ级杆组F 的位置 x F =x E -l EF cos ϕiy F =y E +l EF sin ϕi ϕi =arcsin(A 1/l EF )A 1=H-H 1-y EF 的速度F 的加速度四、建立坐标系以A 为原点建立坐标系,则A (0,0)五、编程使用MATLAB 编写程序如下lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);a=0:0.001:0.5;xF=subs(xF,t,a);plot(a,xF)title('位移x随时间t变化图像') xlabel('t(s)'),ylabel(X')lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);vF=diff(xF,t);a=0:0.001:0.5;vF=subs(vF,t,a);plot(a,vF)title('速度v随时间t变化图像') xlabel('t(s)'),ylabel(V')lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);aF=diff(xF,t,2);a=0:0.001:0.5;aF=subs(aF,t,a);plot(a,aF)title('加速度a随时间t变化图像') xlabel('t(s)'),ylabel(A')六、位移、速度、加速度图像位移xE随时间t变化图像速度vE随时间t变化图像加速度aE随时间t变化图像七、运动分析由MATLAB编程后绘制所得图线分析可知,牛头刨床的刨头F行程约为500mm,在0.06s~0.17s之间速度和加速度波动较大,在0.17s~0.29s 之间速度和加速度波动较小,这就保证了刨头在空行程时有急回运动,而在工作行程是由较均匀的切削速度,运动连续,且运动性能良好稳定。
哈工大机械原理大作业1-16
Harbin Institute of Technology机械原理大作业设计说明书(一)课程名称:机械原理设计题目:连杆运动分析(16)院系:能源科学与工程学院班级:1102201设计者:学号:指导教师:赵永强唐德威设计时间:2013年6月8 日哈尔滨工业大学1 连杆机构运动分析题目16:如图所示机构,已知机构各构件的尺寸为AC l =CE l =100mm ,BC l =CD l =200mm ,90BCD ∠=,构件1的角速度为10/rad s ,试求构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2 分析过程2.1 建立坐标系建立以点E 为原点的固定平面直角坐标系x-E-y,如图所示:图2 机构坐标系2.2结构分析将构件BCD 分为杆3和杆4。
该机构由2个Ⅰ级杆组RR (杆1和杆5)和两个Ⅱ级杆组RRP (杆3、杆4和滑块B 、D )。
其中原动件为杆1。
现将杆组分为如下两部分:图1 机构运动简图RRPRR图3 各级杆组2.3 建立数学模型2.3.1构件1、2、3的分析原动件杆1的转角:1θ=0—360。
原动件杆1的角速度:1ω=.1θ=10/rad s原动件杆1的角加速度:..1αθ==0运动副A 的坐标:0200A A x y mm =⎫⎬=⎭运动副A 的速度及加速度都为零。
构件1为BC (RRP Ⅱ级杆组)上滑块B 的导路 滑块B 的位置为:132cos cos B A C x x s x l θθ=+=+ 132sin sin B A C y y s x l θθ=+=+消去s,得:212arcsinA l θθ=+式中:011()sin ()cos C A C A A x x y y θθ=---构件3的角速度i ω和滑块B 沿导路的移动速度D υ:.211213(Q sin Q cos )/Q ωϕθθ==-+ 1322323(Q cos Q sin )/Q D s l l υθθ⋅==-+式中:..11111211321212Q sin ;Q cos ;Q sin sin cos sin l l l θθθθθθθθ=-==+构件3的角加速度和滑块B 沿导路移动的加速度:..241513(Q sin Q cos )/Q αθθθ==-+..4325323(Q cos Q sin )/Q B s l l υθθ==-+式中:122......21142211111Q cos sin cos 2sin l l l s θθθθθθθθ=---- 122......21152211111Q sin cos sin 2cos l l l s θθθθθθθθ=+-+2.3.2 构件3,4,5的分析构件3,4,5,由1个Ⅰ级基本杆组和一个RRP Ⅱ级杆组组成,与构件1,2,3结构相同,只运动分析过程与其相反。
哈工大机械原理大作业
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:机电学院班级: 1208105分析者:殷琪学号:指导教师:丁刚设计时间:哈尔滨工业大学设计说明书1 、题目如图所示机构,一只机构各构件的尺寸为AB=100mm,BC=4.28AB,CE=4.86AB,BE=8.4AB,CD=2.14AB,AD=4.55AB,AF=7AB,DF=3.32AB,∠BCE=139?。
构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2、机构结构分析该机构由6个构件组成,4和5之间通过移动副连接,其他各构件之间通过转动副连接,主动件为杆1,杆2、3、4、5为从动件,2和3组成Ⅱ级RRR基本杆组,4和5组成Ⅱ级RPR 基本杆组。
如图建立坐标系3、各基本杆组的运动分析数学模型1) 位置分析2) 速度和加速度分析 将上式对时间t 求导,可得速度方程:将上式对时间t 求导,可得加速度方程:RRR Ⅱ级杆组的运动分析如下图所示 当已知RRR 杆组中两杆长L BC 、L CD 和两外副B 、D 的位置和运动时,求内副C的位置、两杆的角位置、角运动以及E 点的运动。
1) 位置方程由移项消去j ϕ后可求得i ϕ:式中,可求得j ϕ:E 点坐标方程:其中2) 速度方程两杆角速度方程为式中,点E 速度方程为3) 加速度方程两杆角加速度为式中,点E 加速度方程为RPR Ⅱ级杆组的运动分析(1) 位移方程(2)速度方程其中(3)加速度方程4、 计算编程利用MATLAB 软件进行编程,程序如下:% 点B 和AB 杆运动状态分析>>r=pi/180;w 1=10;e 1=0;l 1=100;Xa=0;Ya=0;Vax=0;Vay=0;aax=0;aay=0;f1=0:1: 360;% B 点位置Xb=Xa+l1*cos(r*f1);Yb=Ya+l1*sin(r*f1);% B点速度Vbx=Vax-w1*l1*sin(r*f1);Vby=Vay+w1*l1*cos(r*f1);% B点加速度abx=aax-l1*w1.^2.*cos(r*f1);aby=aay-l1*w1.^2.*sin(r*f1);% RRR2级杆组运动分析% 输入D点参数l2=428;l3=214;Xd=455;Yd=0;Vdx=0;Vdy=0;adx=0;ady=0;% 计算E点、2杆、3杆运动参数lbe=840;lce=486;a0=2*l2*(Xd-Xb);b0=2*l2*(Yd-Yb);c0=l2^2+(Xb-Xd).^2+(Yb-Yd).^2-l3^2;f2=2*atan((b0+sqrt(a0.^2+b0.^2-c0.^2))./(a0+c0)); % C点位置Xc=Xb+l2*cos(f2);Yc=Yb+l2*sin(f2);% 2杆、3杆运动参数计算dX=Xc-Xd;dY=Yc-Yd;for n=1:length(dX)if dX(n)>0&dY(n)>=0f3(n)=atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)>0f3(n)=pi/2;elseif dX(n)<0&dY(n)>=0f3(n)=pi+atan(dY(n)/dX(n));elseif dX(n)<0&dY(n)<0f3(n)=pi+atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)<0f3(n)=1.5*pi;elseif dX(n)>0&dY(n)<0f3(n)=2*pi+atan(dY(n)/dX(n));endendC2=l2*cos(f2);C3=l3*cos(f3);S2=l2*sin(f2);S3=l3*sin(f3);G1=C2.*S3-C3.*S2;w2=(C3.*(Vdx-Vbx)+S3.*(Vdy-Vby))./G1;w3=(C2.*(Vdx-Vbx)+S2.*(Vdy-Vby))./G1;G2=adx-abx+(w2.^2).*C2-(w3.^2).*C3;G3=ady-aby+(w2.^2).*S2-(w3.^2).*S3;e2=(G2.*C3+G3.*S3)./G1;% E点位置w=acos((l2^2+lbe^2-lce^2)/(2*l2*lbe));Xe=Xb+lbe*cos(f2-w);Ye=Yb+lbe*sin(f2-w);Vex=Vbx-lbe*w2.*sin(f2-w);Vey=Vby+lbe*w2.*cos(f2-w);aex=abx-lbe*(e2.*sin(f2-w)+w2.^2.*cos(f2-w));aey=aby+lbe*(e2.*cos(f2-w)-w2.^2.*sin(f2-w));% 计算杆5运动参数Xf=646.2912088;Yf=-268.9008617;l5=sqrt((Xe-Xf).^2+(Ye-Yf).^2);dX=Xe-Xf;dY=Ye-Yf;for n=1:length(dX)if dX(n)>0&dY(n)>=0f5(n)=atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)>0f5(n)=pi/2;elseif dX(n)<0&dY(n)>=0f5(n)=pi+atan(dY(n)/dX(n));elseif dX(n)<0&dY(n)<0f5(n)=pi+atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)<0f5(n)=1.5*pi;elseif dX(n)>0&dY(n)<0f5(n)=2*pi+atan(dY(n)/dX(n));endendw5=(-Vex.*sin(f5)+Vey.*cos(f5))./l5;a5=(-aex.*sin(f5)+aey.*cos(f5))./l5;% 画出各参数曲线figure(1);plot(Xe,Ye,'k');xlabel('Xe/\mm');ylabel('Ye/mm');grid on;title('E点位置');figure(2);plot(f1,f5,'k');xlabel('f/\circ');ylabel('f5/\circ');grid on;title('5杆角位移');figure(3);plot(f1,w5,'k');xlabel('f/\circ');ylabel('w5/rad/s');grid on;title('5杆角速度');figure(4);plot(f1,a5,'k');xlabel('f/\circ');ylabel('a5/rad/s2');gridon;title('5杆角加速度');Warning: Unable to interpret TeX string "Xe/\mm"5、计算结果图一:E点的运动轨迹图二:5杆角位移图三:5杆角速度图四:5杆角加速度6、计算结果分析由E点位置图像可看出,构件4做周期往复运动,由图二、三、四可看出,构件5的角位移、角速度、角加速度均成周期性变化。
哈工大机械设计大作业一千斤顶
Harbin Institute of Technology哈尔滨工业大学机械设计作业设计计算说明书题目:设计螺旋起重器(千斤顶)系别:班号:姓名:日期:Harbin Institute of Technology哈尔滨工业大学机械设计作业任务书题目:设计螺旋起重器设计原始数据:题号3.1.1起重量Fq=30 kN最大起重高度H=180mm一 选择螺杆、螺母的材料螺杆采用45#调制钢,由参考文献[2]表10.2查得抗拉强度b 600 MPa σ=,s 355 MPa σ=。
螺母材料用铝黄铜ZCuAl10Fe3。
二 耐磨性计算螺杆选用45# 钢,螺母选用铸造铝黄铜ZCuAl10Fe3,由参考文献[1]表 5.8 查得[]p =18~25MPa从表 5.8 的注释中可以查得,人力驱动时[]p 值可以加大20%,则[]p =21.6~30MPa 取[]25MPa p = 。
按耐磨性条件设计螺纹中径2d ,选用梯形螺纹,则2d ≥由参考文献[1]查得,对于整体式螺母系数2ψ==1.2—2.5,取2ψ=。
则式中:Q F -----轴向载荷,N ;2d -----螺纹中径,mm ;[]p -----许用压强,MPa ;查参考文献[2]表11.5取公称直径28d =mm ,螺距3P =mm ,中径226.5d =mm ,小径324.5d =mm ,内螺纹大径428.5D =mm 。
三 螺杆强度校核螺杆危险截面的强度条件为:219.6d mm ≥==e []σσ=≤ (2) 式中:Q F -----轴向载荷,N ;3d -----螺纹小径,mm ;1T -----螺纹副摩擦力矩,21tan(')2Q d T F ψρ=+(3)ψ为螺纹升角,ψ=arctan npπd 2=arctan 1×3π×26.5=2.0637°;[]σ-----螺杆材料的许用应力,MPa 。
查参考文献[1]表5.10得钢对青铜的当量摩擦因数'0.08~0.10f =,螺纹副当量摩擦角'arctan 'arctan 0.08~arctan 0.10 4.5739~5.7106f ρ===o ,取' 5.7106ρ=o (由表5.10的注释知,大值用于启动时,人力驱动属于间歇式,故应取用大值)。
哈工大机械原理大作业一连杆-15题
Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆传动设计院系:船舶与海洋工程学院班级:1513102班分析者:刘康哲学号:*********指导教师:***设计时间:2017.06.051.题目:如图所示机构,已知机构各构件的的尺寸为l AB=100mm,l BD=400mm,l AE=400mm,l BC=200mm,曲柄AB的角速度为w1=10rad/s,试求构件2上点D的轨迹,构件5的角位移、角速度和角加速度,并对结果进行分析。
(题中构件尺寸满足l BD-l AB<l AE<l BD+l AB)。
2.机构的结构分析及基本杆组划分机构各构件都在同一平面内运动,可拆分成一个原动件(构件1),一个RRPⅡ级基本杆组(构件2、3)和一个RPR Ⅱ级基本杆组(构件4、5)。
活动构件数n=5,P L,P H,因此,机构的自由度为F=3*n-2* P L- P H =3*5-2*7=1原动件:RRPⅡ级基本杆组:RPR Ⅱ级基本杆组:3.坐标系的建立以A点为坐标原点,AE方向为x轴正方向,建立平面直角坐标系。
4.各基本杆组的运动分析数学模型(1)原动件:位置分析: X B = X A + L AB * cos(wt) Y B = Y A + L AB * sin(wt) 其中,X A = Y A = 0 ,w = 10rad/s , L AB = 100 mm 速度分析:将上式分别对时间求导,可得速度方程,V XB = V XA – w*L AB *sin(wt)V YB = V YA + w*L AB *cos(wt)其中,V XA = V YA = 0 加速度分析:将上式分别对时间求导,可得速度方程,a XA = a XA – α* L AB * sin(wt) – w*w*L AB *cos(wt)a YA = a YA + α* L AB * cos(wt) – w*w*L AB *sin(wt)其中,a XA = a YA = 0 α= dw/dt(2)RRP Ⅱ级基本杆组:位置分析: X C = LAB*cos(wt)+wt Lab Lbc 222sin *Y C = 0 可求得,β= arcsin (Y B / L BC ) 速度分析:将上式分别对时间求导,可得速度方程,V XC =-w* LAB*cos(wt) – (wt Lab Lbc 222sin * )-1/2 * sin(wt)*wV YC = 0加速度分析:将上式分别对时间求导,可得加速度方程, (3)RPR Ⅱ级基本杆组位置分析: X D = X C + L CD * cos βY D = - L CD * sin β可求得, θ = arctan (-YD / (LAE -XD) ) 速度分析:将上式分别对时间求导,可得速度方程,5.计算编程在MATLAB 中编写如下程序:function [ XD,YD,Q,Q1,Q2] = calculate(t) %UNTITLED4 Summary of this function goes here % Detailed explanation goes here Lab=100; Lbc=200; Lcd=200; Lae=400; w=10;XB=Lab*cos(w.*t); YB=Lab*sin(w.*t); P=asin(YB./Lbc); XC=sqrt(Lbc.^2-YB.^2)+XB; XD=Lcd.*cos(P)+XC; YD=-Lcd.*sin(P); Q=atan(YD./(Lae-XD)); Q1=diff(Q); Q2=diff(Q1); end5.计算结果t 时间 XD D 点横坐标YD D 点纵坐标Q构件5角度Q1 构件5角速度 Q2构件5角加速度5000.10050.003008D点运动轨迹:构件5的角位移线图:构件5的角速度图:构件5的角加速度线图:6.计算结果分析原动件1可做整周回转,同时构件5也可做整周运动。
哈工大机械原理大作业连杆
哈工大机械原理大作业连杆Modified by JACK on the afternoon of December 26, 2020Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:机电工程学院班级:设计者:学号:指导教师:设计时间:1.运动分析题目(11)在图所示的六杆机构中,已知:AB l =150mm, AC l =550mm, BD l =80mm, DE l =500mm,曲柄以等角速度1w =10rad/s 沿逆时针方向回转,求构件3的角速度、角加速度和构件5的位移、速度、加速度。
2.机构的结构分析建立以点A 为原点的固定平面直角坐标系A-x, y,如下图:机构结构分析该机构由Ⅰ级杆组RR (原动件1)、Ⅱ级杆组RPR (杆2及滑块3)和Ⅱ级杆组RRP (杆4及滑块5)组成。
3.建立组成机构的各基本杆组的运动分析数学模型原动件1(Ⅰ级杆组RR )由图所示,原动件杆1的转角a=0-360°,角速度1w =10rad/s ,角加速度1a =0,运动副A 的位置坐标A x =A y =0,速度(A ,A),加速度(A ,A ),原动件1的长度AB l =150mm 。
求出运动副B 的位置坐标(B x , B y )、速度(B ,B )和加速度(B ,B )。
杆2、滑块3杆组(RPR Ⅱ级杆组)已出运动副B 的位置(B x , B y )、速度(B ,B )和加速度(B ,B ),已知运动副C 的位置坐标C x =0, C y =550mm,速度,加速度,杆长AC l =550mm 。
求出构件2的转角b,角速度2w 和角加速度2a . 构件二上点D 的运动已知运动副B 的位置(B x , B y )、速度(B ,B )、加速度(B ,B ),已经求出构件2的转角b ,角速度2w 和角加速度2a ,杆BD 的长度BD l =80mm 。
哈工大机械原理大作业一连杆
Harbin Institute of Technology(一)连杆设计说明书课程名称:机械原理设计题目:连杆机构运动分析院系:机电工程学院班级:1308302设计者:吉曾纬指导教师:赵永强唐德威设计时间:2015年6月运动分析题目:如图所示机构,已知机构各构件的尺寸为AB=150mm ,β=97°,BC=400mm ,CD=300mm ,AD=320mm ,BE=100mm ,EF=230mm ,FG=400mm ,构件1的角速度为ω1=10rad/s,试求构件2上点F 的轨迹及构件5上点G 的位移、速度和加速度,并对计算结果进行分析。
一.对机构进行结构分析依题意可以将杆机构看作曲柄滑块机构和曲柄摇杆机构。
对4机构进行结构分析该机构由原动件AB (Ⅰ级组),BCD (RRR Ⅱ级杆组)和FG (RRP Ⅱ级杆组)组成。
二.建立以点A 为原点的固定平面直角坐标系A-x,y,如图所示。
三.各基本杆组的运动分析数学模型(1)原动件AB(Ⅰ级组)已知原动件AB的转角ψ1=0~2π原动件AB的角速度ω1=10rad/s 原动件AB的角加速度α1=0运动副A的位置坐标xA =0 yA=0A点与机架相连,即该点速度和加速度均为0。
运动副A的速度vxA =0 vyA=0运动副A的加速度axA =0 ayA=0原动件AB长度lAB=150mm 可求出运动副B的位置坐标xB =xA+lABcosψ1yB=xA+lABsinψ1运动副B的速度vxB = vxA-ω1lABsinψ1vyB= vyA+ω1lABcosψ1运动副B的加速度a xB = axA-ω12 lABcosψ1-α1lABsinψ1ayB=ayA-ω12 lABsinψ1+α1lABcosψ1(2) BCD (RRR Ⅱ级杆组)由(1)知B 点位置坐标、速度、加速度 运动副D 点位置坐标x D =320mm y D =0 D 点与机架相连,即该点速度和加速度均为0。
哈工大机械制造技术基础大作业
哈工大机械制造技术基础大作业一、零件加工图样在CA6140机床中,拨叉在变速箱中起到控制齿轮组的移动,改变啮合齿轮对,从而改变传动比实现变速功能。
零件材料采用200HT 灰铸铁,生产工艺简单、可铸性高,但材料脆性大不易磨削。
需要加工的部分及加工要求如下:1、0.0210Φ22+孔,还有与其相连的8M 螺纹孔和Φ8锥销孔;2、小孔的上端面,大孔的上下两端面;3、大头的半圆孔0.40Φ55+;4、Φ40上端面,表面粗5、糙度为 3.2Ra ,该面和Φ20孔中心线垂直度误差为0.05mm ;5、0.50Φ73+半圆形上下端面与Φ22孔中心线垂直度误差为0.07mm 。
二、零件加工工艺设计(一)确定毛坯的制造形式零件材料为HT200。
考虑到零件在机床运行时过程中所受冲击不大,零件结构又比较简单,生产类型为大批生产,故选择铸件毛坯。
选用铸件尺寸公差等级CT9级。
(二)工艺初步安排零件的加工批量以大批量为主,用通用机床加工,工序适当集中,减少工件装夹次数以缩短生产周期、保证其位置精度。
(三)选择基准基准的选择是工艺规程设计中的重要工作之一。
基准选择得正确合理,可以使加工质量得到保证,生产效率得以提高。
(1)粗基准的选择:以零件的底面为主要的定位粗基准,以两个小头孔外圆表面为辅助粗基准。
这样就能限制工件的五个自由度,再加上垂直的一个机械加紧,就可达到完全定位。
(2)精基准的选择:考虑到要保证零件的加工精度和装夹准确方便,依据“基准重合”原则和“基准统一”原则,以粗加工后的底面为主要定位基准,以两个小孔头内圆柱表面为辅助的定位精基准。
(四)制定工艺路线1.工艺方案分析此零件加工工艺大致可分为两个:方案一是先加工完与Φ22mm 的孔有垂直度要求的面再加工孔。
而方案二恰恰相反,先加工Φ22mm的孔,再以孔的中心线来定位加工完与之有垂直度要求的三个面。
方案一装夹次数较少,但在加工Φ22mm的时候最多只能保证一个面与定位面之间的垂直度要求。
哈工大机械设计基础试题与答案(doc 9页)(正式版)
1分,共30分)1. 机构具有确定运动的条件是机构的自由度大于零且机构的原动件数等于机构的自由度。
η=η1η2η3。
7.在矩形螺纹、梯形螺纹、锯齿形螺纹和三角形螺纹四种螺纹中,传动效率最高的是矩形螺纹;双向自锁性最好的是三角形螺纹;只能用于单向传动的是锯齿形螺纹。
8. 普通平键的工作面是两侧面;楔键的工作面为键的__上下_____面,平键的剖面尺寸b×h按轴径d 来查取。
9. 代号为72308的滚动轴承,其类型名称为角接触球轴承,内径为40 mm,2 为宽度系列代号, 3 为直径系列代号。
10. 圆柱螺旋压缩弹簧在工作时最大应力发生在弹簧丝内侧。
(每题4分,共20分)答:速度瞬心定义为:互相作平面相对运动的两构件上在任一瞬时其相对速度为零的重合点。
或说是作平面相对运动的两构件上在任一瞬时其速度相等的重合点(即等速重合点)。
三心定理:作平面运动的三个构件共有三个瞬心,他们位于同一直线上。
2.带传动中的弹性滑动与打滑有什么区别?答:弹性滑动和打滑是两个截然不同的概念。
但是在冲击、振动和变载荷作用下,或当温度变化很大时,螺纹副间的摩擦力可能减小或瞬间消失,这种现象多次重复就会使连接松脱,影响连接的正常工作,甚至会发生严重事故。
因此,设计时必须采取防松。
摩擦防松,机械防松,破坏螺纹副关系。
5. 简述动压油膜形成的必要条件。
答:1.相对运动表面间必须形成收敛形间隙;2. 要有一定的相对运动速度,并使润滑油从大口流入,从小口流出。
3. 间隙间要充满具有一定粘度的润滑油。
三、分析计算题(共38分)1.(7分)计算图中所示机构的自由度数。
若该机构存在局部自由度、复合铰链、虚约束等请在图中指明。
(3)该机构的最小传动角如图所示。
(3分)3.(7分) 为蜗轮;其中主动齿轮1答以下问题:(1)判断齿轮2(2)画出蜗杆3(3)画出蜗杆3解:(1)齿轮2为左旋 复合铰链(1分)C(2)蜗杆3在节点处的三个分力方向如图所示;(每问1分); (3)蜗杆3和蜗轮4的转动方向如图所示。
哈工大机械制造技术基础大作业.doc
在CA6140机床中,拨叉在变速箱中起到控制齿轮组的移动,改变啮合齿轮对,从而改变传动比实现变速功能。
零件材料采用200HT 灰铸铁,生产工艺简单、可铸性高,但材料脆性大不易磨削。
需要加工的部分及加工要求如下:1、0.0210Φ22+孔,还有与其相连的8M 螺纹孔和Φ8锥销孔;2、小孔的上端面,大孔的上下两端面;3、大头的半圆孔0.40Φ55+;4、 Φ40上端面,表面粗5、 糙度为 3.2Ra ,该面和Φ20孔中心线垂直度误差为0.05mm ;5、0.50Φ73+半圆形上下端面与Φ22孔中心线垂直度误差为0.07mm 。
二、零件加工工艺设计(一)确定毛坯的制造形式零件材料为HT200。
考虑到零件在机床运行时过程中所受冲击不大,零件结构又比较简单,生产类型为大批生产,故选择铸件毛坯。
选用铸件尺寸公差等级CT9级。
(二)工艺初步安排零件的加工批量以大批量为主,用通用机床加工,工序适当集中,减少工件装夹次数以缩短生产周期、保证其位置精度。
(三)选择基准基准的选择是工艺规程设计中的重要工作之一。
基准选择得正确合理,可以使加工质量得到保证,生产效率得以提高。
(1)粗基准的选择:以零件的底面为主要的定位粗基准,以两个小头孔外圆表面为辅助粗基准。
这样就能限制工件的五个自由度,再加上垂直的一个机械加紧,就可达到完全定位。
(2)精基准的选择:考虑到要保证零件的加工精度和装夹准确方便,依据“基准重合”原则和“基准统一”原则,以粗加工后的底面为主要定位基准,以两个小孔头内圆柱表面为辅助的定位精基准。
(四)制定工艺路线1.工艺方案分析此零件加工工艺大致可分为两个:方案一是先加工完与Φ22mm的孔有垂直度要求的面再加工孔。
而方案二恰恰相反,先加工Φ22mm的孔,再以孔的中心线来定位加工完与之有垂直度要求的三个面。
方案一装夹次数较少,但在加工Φ22mm的时候最多只能保证一个面与定位面之间的垂直度要求。
其他的两个面很难保证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大作业计算说明书
题目:平面连杆机构设计
学院:英才学院
班号:1236405班
学号:**********
姓名:***
日期:2014年9月27日
哈尔滨工业大学
大作业任务书
题目:平面连杆机构设计
设计原始数据及要求:
l为70mm,摆角ψ为35°,摇杆行程速比系设计一曲柄摇杆机构。
已知摇杆长度
3
∠,值数K为1.2,摇杆CD靠近曲柄回转中心A一侧的极限位置与机架间的夹角为CDA
为50°,试用图解法设计其余三杆的长度,并检验(测量或计算)机构的最小传动角γ。
目录
1.设计原始数据及要求 (1)
2.设计过程 (1)
2.1计算极位夹角θ
2.2绘制机架位置线及摇杆的两个极限位置
2.3确定曲柄回转中心
2.4确定各赶长度
2.5验算最小传动角γ
3.参考文献 (2)
1. 设计原始数据及要求
设计一曲柄摇杆机构。
已知摇杆长度3l 为70mm ,摆角ψ 为35°,摇杆行程速比系数K 为
1.2,摇杆CD 靠近曲柄回转中心A 一侧的极限位置与机架间的夹角为CDA ∠ ,值为50°,试用图解法[1]设计其余三杆的长度,并检验(测量或计算)机构的最小传动角γ 。
2.设计过程
2.1计算极位夹角θ 1 1.2118018016.361 1.21
K K θ--=︒=︒⨯=︒++ 式中,θ ——极位夹角;
K ——摇杆行程速比系数。
2.2绘制机架位置线及摇杆的两个极限位置
平面上任取一点D ,作一水平线AD 作为机架位置线,由∠CDA=50°和50ψ=︒ 确定CD 杆的两个极限位置。
并作CD=70mm 。
如图1所示:
2.3确定曲柄回转中心
曲柄的回转中心必在A ,C1,C2所在的圆上,只要确定该圆即可作出A 的位置。
由16.36θ=︒ 得出12C C 所对圆心角为∠C 1OC 2=32.72°,则∠OC 1C2=∠OC 2C 1=73.64°,作出该两角,即可确定圆心O 的位置。
作出圆O ,与机架位置线的左侧交点即为A 。
如图2所示
2.4确定各赶长度
假设AB,BC,CD,AD 杆的长度分别为1234l l l l ,已知3l 长度为70mm ,经过测量4l 长度为72mm ;经过测量,当AB,BC 杆在同一直线上时有:
12219660
l l l l +=⎧⎨-=⎩ 则1l 长18mm ,2l 长78mm 。
2.5验算最小传动角γ 当AB 与AD 杆在同一直线上时,传动角最小。
经过测量最小传动角的值为43°,机构具有良好的传动性能。
3.参考文献
[1]宋宝玉,王瑜,张锋主编.机械设计基础(M).哈尔滨:哈尔滨工业大学出版社,2010.。