中南大学自动控制原理—线性系统的校正实验报告
线性系统的校正试验报告

线性系统的校正试验报告一、引言线性系统是指输入与输出之间存在线性关系的系统。
在实际应用中,为了保证系统的准确性和可靠性,需要对线性系统进行校正。
本次试验的目标是校正线性系统,测试其输入与输出之间的线性关系,并验证其准确性和可靠性。
二、实验目的1.校正线性系统,获取其输入与输出之间的线性关系。
2.验证线性系统的准确性和可靠性。
三、实验仪器与材料1.线性系统2.信号发生器3.示波器4.电缆5.计算机四、实验步骤1.连接实验仪器与材料,确保信号发生器与示波器与线性系统的输入与输出正确连接。
2.设置信号发生器的输出信号频率和幅度,并记录相关参数。
3.将信号发生器输出信号连接至线性系统的输入端口,将示波器连接至线性系统的输出端口。
4.通过示波器观察线性系统的输出波形,并记录相关参数。
5.重复步骤2至4,获取多组输出波形数据。
6.根据信号发生器的输出信号和示波器的输出波形数据,绘制输入与输出之间的线性关系曲线。
7.分析曲线的线性程度,评估线性系统的准确性和可靠性。
五、实验结果与分析根据实验步骤所获得的数据,绘制输入与输出之间的线性关系曲线。
根据曲线的趋势和拟合度,可以判断线性系统的准确性和可靠性。
六、结论根据实验结果与分析,可以得出线性系统在一定范围内满足线性关系,但在较大输入幅度时可能存在非线性失真。
线性系统的准确性和可靠性需要根据具体应用场景进行评估,对于要求较高准确性和可靠性的应用,可能需要进行进一步校正或选择其他更适合的系统。
七、实验心得通过这次实验,我对线性系统的校正工作有了更深入的了解。
在实际应用中,校正线性系统是确保系统准确性和可靠性不可或缺的一步,对于研究和开发工作具有重要意义。
同时,实验过程中也学会了使用信号发生器和示波器进行测量和观察,提高了实验操作能力。
[1]系统校正方法与技术研究,XXX,XXX出版社,2024年。
[2]信号源与示波器的使用方法,XXX,XXX期刊,20XX年。
线性系统的校正 实验报告
线性系统的校正实验报告翻译:摘要:本实验通过给定的线性系统对其进行校正,在不同的频率下对系统进行稳态和瞬态测试,通过测试结果分析系统性能和误差,掌握线性系统的基本原理和校正方法。
引言:线性系统广泛应用于各种工业、科技领域,而线性系统的准确度和稳定性关系到整个系统的效率和安全性。
因此,对线性系统进行校正是保证其正常运行的必要手段。
本实验将针对一个给定的线性系统进行校正,分析其校正效果。
实验设计:1. 实验仪器本实验要求使用信号发生器、数字脉冲计数器和示波器。
2. 实验内容(1)信号发生器的设置设置输出波形类型和频率,使其跟线性系统的工作频率相同。
(2)数字脉冲计数器的设置通过数字脉冲计数器测试稳态和瞬态响应,并对脉冲计数器进行校准。
(3)示波器的设置观测线性系统的输出信号,分析系统的稳态和动态响应。
(4)线性系统的测试使用信号发生器输入不同频率的正弦波和方波信号,观测输出信号,并记录数字脉冲计数器的计数。
3.实验步骤(1)准备工作将信号发生器和示波器连接线性系统的输入和输出接口,调节信号发生器的频率和幅度。
(2)瞬态响应测试在信号发生器上输入方波信号,在示波器上观测输出信号的瞬态响应,通过计数器获取相关数据。
在信号发生器上输入正弦波信号,通过调整幅度和相位,使其和线性系统的工作频率相同,记录计数器的数据,并分析系统的稳态响应。
结果分析:通过本实验的测试,得到了不同频率下线性系统的稳态和瞬态响应。
观察稳态响应的幅频响应曲线,分析系统的性能。
通过瞬态响应和数字脉冲计数器的数据,计算误差,判断系统的准确度和稳定性。
运用基本的线性系统校准方法对系统进行校准,进一步提高系统的准确度和稳定性。
结论:。
自动控制原理 系统校正实验报告
肇 庆 学 院
电子信息与机电工程 学院 模拟电路 课 实验报告
12电气(1) 班 姓名 李俊杰 学号 201224122119 实验日期2014年5月26 日 实验合作者:李奕顺 王圆圆 老师评定
实验题目:系统校正
一、实验目的
学会设计校正装置,使系统满足性能指标
二、实验原理
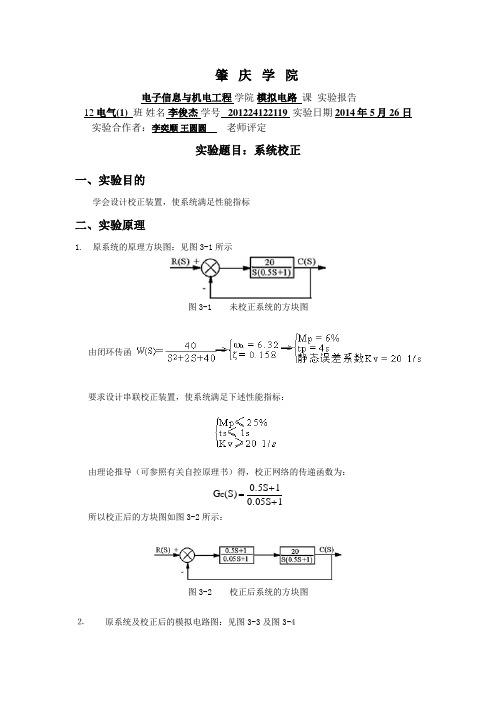
1. 原系统的原理方块图:见图3-1所示
图3-1 未校正系统的方块图
由闭环传函
要求设计串联校正装置,使系统满足下述性能指标:
由理论推导(可参照有关自控原理书)得,校正网络的传递函数为:
1
0.05S 10.5S (S)G C ++=
所以校正后的方块图如图3-2所示:
图3-2 校正后系统的方块图
⒉ 原系统及校正后的模拟电路图:见图3-3及图3-4
图3-3 未校正系统的模拟电路图
图3-4 校正后系统模拟电路
三、实验内容及步骤
⑴测量未校正系统的性能指标。
准备:将“信号源单元”(U1 SG)的ST插针用“短路块”短接。
实验步骤:
①按图3-3接线。
②加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp和调节时间ts,将曲线及参数记录下来。
⑵测量校正系统的性能指标。
①按图3-4接线。
②加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp以及调节时间ts,看是否达到期望值,若未达到,请仔细检查接线(包括阻容值)。
⑶具体参数及响应曲线请参照表3-1。
表3-1
四、实验结论与分析。
中南大学自动控制原理实验—线性系统的频率响应分析
点击极坐标图按钮 ,可以得到对象的闭环极坐标。
(5)根据所测图形可适当修改正弦波信号的角频率和幅值重新测量,达到满意的效果。
3.间接测量方法:(测对象的开环频率特性)将示波器的“CH1”接至3#运放的输出端,“CH2”接至1#运放的输出端。按直接测量的参数将参数设臵好,将测量方式改为“间接”测量。此时相位差是反馈信号和误差信号的相位差,应将两根游标放在反馈和误差信号上。测得对象的开环波特图和开环极坐标图。
3.频率特性的表达式(1)对数频率特性:又称波特图,它包括对数幅频和对数相频两条曲线,是频率响应法中广泛使用的一组曲线。这两组曲线连同它们的坐标组成了对数坐标图。对数频率特性图的优点:①它把各串联环节幅值的乘除化为加减运算,简化了开环频率特性的计算与作图。②利用渐近直线来绘制近似的对数幅频特性曲线,而且对数相频特性曲线具有奇对称于转折频率点的性质,这些可使作图大为简化。③通过对数的表达式,可以在一张图上既能绘制出频率特性的中、高频率特性,又能清晰地画出其低频特性。(2)极坐标图(或称为奈奎斯特图) (3)对数幅相图(或称为尼柯尔斯图)本次实验中,采用对数频率特性图来进行频域响应的分析研究。实验中提供了两种实验测试方法:直接测量和间接测量。
六、数据处理
七、分析讨论
由波特图来确定开环传递函数:
1.用±20ndb/dec的直线段去近似实验所得对数幅频特性。
2.开环增益K的确定。
(1)ω=1时,20lgK=L K=
(2)利用对数幅频特性与稳态误差的关系。
(3)利用直线方程,根据已知条件推算。
3.确定积分环节的个数:由最低频率段的斜率确定。
自控实验中三线性系统的校正实践与总结

自控实验中三线性系统的校正实践与总结在自控实验中,三线性系统的校正实践是一个重要的环节。
通过对系统参数进行准确的校正,可以提高系统的稳定性和控制精度。
本文将对三线性系统的校正实践进行总结,并探讨实践中的一些经验和技巧。
首先,三线性系统的校正实践需要确定系统的数学模型。
根据系统的物理特性和控制要求,可以建立系统的传递函数或状态空间模型。
通过实验数据的采集和分析,可以进一步优化模型的参数,使其更贴近实际情况。
其次,校正实践需要选择合适的校正方法。
常用的校正方法包括开环校正、闭环校正和最优校正等。
开环校正是在系统输入端加入一定的激励信号,通过观察输出响应来分析系统的动态特性。
闭环校正是在系统的控制回路中采集反馈信号,通过调整控制器参数来优化系统的控制效果。
最优校正是通过最小化系统误差的某个性能指标,来确定最佳的校正参数。
在实践中,有一些重要的技巧和经验可以帮助我们进行三线性系统的校正。
首先,建议采用逐步逼近法进行校正。
即先根据初始参数进行校正,然后逐步调整参数,直到达到目标控制效果。
这样可以避免参数调整过快导致系统不稳定。
其次,注意系统的灵敏度和鲁棒性。
灵敏度表示系统输出对参数变化的敏感程度,鲁棒性表示系统对参数变化的容忍程度。
通过优化系统的灵敏度和鲁棒性,可以提高系统的稳定性和可靠性。
在实践中,还需要注意一些常见的问题和挑战。
首先,系统的非线性特性可能会导致校正的困难。
针对非线性系统,可以采用线性化的方法进行校正,即在一定工作范围内假定系统是线性的。
其次,存在传感器误差和信号干扰等问题,这会对校正的准确性产生影响。
为了解决这些问题,可以采用滤波和校正算法等技术手段,提高系统的鲁棒性。
最后,校正实践的总结对于进一步改进系统性能和设计控制策略具有重要意义。
通过总结和分析校正过程中的经验和教训,可以发现系统的优缺点,找到改进的方向。
同时,总结还可以为未来的实验提供参考,提高实验的效率和质量。
综上所述,三线性系统的校正实践是一个复杂而重要的过程。
自动控制原理实验报告-线性系统串联校正设计

实验五线性系统串联校正设计实验原理:(1)串联校正环节原理串联校正环节通过改变系统频率响应特性,进而改善系统的动态或静态性能。
大致可以分为(相位)超前校正、滞后校正和滞后-超前校正三类。
超前校正环节的传递函数如下Tαs+1α(Ts+1),α>1超前校正环节有位于实轴负半轴的一个极点和一个零点,零点较极点距虚轴较近,因此具有高通特性,对正频率响应的相角为正,因此称为“超前”。
这一特性对系统的穿越频率影响较小的同时,将增加穿越频率处的相移,因此提高了系统的相位裕量,可以使系统动态性能改善。
滞后校正环节的传递函数如下Tαs+1Ts+1,α<1滞后校正环节的极点较零点距虚轴较近,因此有低通特性,附加相角为负。
通过附加低通特性,滞后环节可降低系统的幅值穿越频率,进而提升系统的相位裕量。
在使系统动态响应变慢的同时提高系统的稳定性。
(2)基于Baud图的超前校正环节设计设计超前校正环节时,意图让系统获得最大的超前量,即超前网络的最大相位超前频率等于校正后网络的穿越频率,因此设计方法如下:①根据稳态误差要求确定开环增益。
②计算校正前系统的相位裕度γ。
③确定需要的相位超前量:φm=γ∗−γ+(5°~12°) ,γ∗为期望的校正后相位裕度。
④计算衰减因子:α−1α+1= sin φm。
此时可计算校正后幅值穿越频率为ωm=−10lgα。
⑤时间常数T =ω√α。
(3)校正环节的电路实现构建待校正系统,开环传递函数为:G(s)=20s(s+0.5)电路原理图如下:校正环节的电路原理图如下:可计算其中参数:分子时间常数=R1C1,分母时间常数=R2C2。
实验记录:1.电路搭建和调试在实验面包板上搭建前述电路,首先利用四个运算放大器构建原系统,将r(t)接入实验板AO+和AI0+,C(t)接入AI1+,运算放大器正输入全部接地,电源接入±15V,将OP1和OP2间独立引出方便修改。
基于另外两运算放大器搭建校正网络,将所有电容值选为1uF,所有电阻引出方便修改。
中南大学自动控制原理—线性系统的校正实验报告

七、分析讨9.53,t(s)=3.844s
2.校正系统的性能指标
由图知,Mp(%)=18.12,t(s)=0.422s
六、数据处理
由系统的开环传递函数 及闭环传递函数 知,系统的特征参量:ωn=6.32,ξ=0.158,系统的性能指标:Mp=60%,tS=4s,静态误差系数Kv=20(1/s)。要求采用串联校正的方法,使系统满足下述性能指标:Mp≤25%,tS≤1s,静态误差系数Kv≥20(1/s)。由Mp≤25%,ts≤1s得:ξ≥0.4,ωn≥10,设校正后的系统开环传函为: ,由期望值得: ≥20,K≥20。取ξ=0.5,则T=0.05s,ωn=20满足ωn≥10,得校正后开环传函为: .
三、仪器设备
PC机一台,TD-ACC+(或TD-ACS)教学实验系统一套。
四、线路示图
1.原系统的结构框图及模拟电路图
2.加校正环节后的系统结构框图及模拟电路图
五、内容步骤
1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。将开关设在“方波”档,分别调节调幅和调频电位器,使得“OUT”端输出的方波幅值为1V,周期为10s左右。
实验报告
实验名称线性系统的校正
系
专业
测控
班
姓名
学号
授课老师
夏利民
预定时间
2013-5-20
实验时间
2013-5-20
实验台号
19
一、目的要求
1.掌握系统校正的方法,重点了解串联校正。
2.根据期望的时域性能指标推导出二阶系统的串联校正环节的传递函数。
中南大学自动控制原理实验报告
中南大学自动控制原理实验报告--------------------------------------------------------------------------作者: _____________--------------------------------------------------------------------------日期: _____________信息科学与工程学院本科生实验报告实验名称自动控制原理实验预定时间实验时间姓名学号授课教师实验台号专业班级实验一 1.1典型环节的时域分析实验目的:1.熟悉并掌握 TD-ACC+(或 TD-ACS)设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃响应曲线和实际阶跃响应曲线。
对比差异、分析原因。
3.了解参数变化对典型环节动态特性的影响。
实验设备:PC 机一台, TD-ACC+(或 TD-ACS)实验系统一套。
模拟电路图如下:实验结果:当R0=200K;R1=100K。
输出电压约为输入电压的1/2,误差范围内满足理论波形,当R0 = 200K; R1 = 200K。
积分环节模拟电路图:当R0=200K;C=1uF。
实验结果:当R0 = 200K; C = 2uF。
比例积分环节 (PI)模拟电路图:取 R0 = R1 = 200K; C = 1uF。
实验结果取 R0=R1=200K; C=2uF。
惯性环节(T)模拟电路图:取 R0=R1=200K; C=1uF。
取 R0=R1=200K; C=2uF。
比例微分环节(PD)模拟电路图:取 R0 = R2 = 100K, R3 = 10K, C = 1uF; R1 = 100K。
取 R0=R2=100K, R3=10K, C=1uF; R1=200K。
比例积分微分环节(PID)模拟电路图:取 R2 = R3 = 10K, R0 = 100K, C1 = C2 = 1uF; R1 = 100K。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验名称线性系统的校正化
班
1102
姓名
钟和江
学号
0909110824
授课老师
韩华
预定时间
实验时间
2013-6-7
实验台号
一、目的要求
1.掌握系统校正的方法,重点了解串联校正。
2.根据期望的时域性能指标推导出二阶系统的串联校正环节的传递函数。
二、原理简述
所谓校正就是指在系统中加入一些机构或装臵(其参数可以根据需要而调整),使系统特性发生变化,从而满足系统的各项性能指标。按校正装臵在系统中的连接方式,可分为:串联校正、反馈校正和复合控制校正三种。串联校正是在主反馈回路之内采用的校正方式,串联校正装臵串联在前向通路上,一般接在误差检测点之后和放大器之前。本次实验主要介绍串联校正方法
三、仪器设备
PC机一台,TD-ACC+(或TD-ACS)教学实验系统一套。
四、线路示图
1.原系统的结构框图及模拟电路图
2.加校正环节后的系统结构框图及模拟电路图
五、内容步骤
1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。将开关设在“方波”档,分别调节调幅和调频电位器,使得“OUT”端输出的方波幅值为1V,周期为10s左右。
因为原系统开环传函为: 且采用串联校正,所以串联校正环节的传函为:
七、分析讨论
1.原系统的性能指标
由图知:Mp(%)=59.53,t(s)=3.844s
2.校正系统的性能指标
由图知,Mp(%)=18.12 ,t(s)=0.422s
2.测量原系统的性能指标。(1)按图1.3-2接线。将1中的方波信号加至输入端。(2)用示波器的“CH1”和“CH2”表笔测量输入端和输出端。计算响应曲线的超调量MP和调节时间tS。
3.测量校正系统的性能指标。(1)按图1.3-4接线。将1中的方波信号加至输入端。(2)用示波器的“CH1”和“CH2”表笔测量输入端和输出端。计算响应曲线的超调量MP和调节时间tS,是否达到期望值,若未达到,请仔细检查接线(包括阻容值)。
六、数据处理
由系统的开环传递函数 及闭环传递函数 知,系统的特征参量:ωn=6.32,ξ=0.158,系统的性能指标:Mp=60%,tS=4s,静态误差系数Kv=20 (1/s)。要求采用串联校正的方法,使系统满足下述性能指标:Mp≤25%,tS≤1s,静态误差系数Kv≥20 (1/s)。由Mp≤25%,ts≤1s得:ξ≥0.4,ωn≥10,设校正后的系统开环传函为: ,由期望值得: ≥20,K≥20。取ξ=0.5,则T=0.05s,ωn=20满足ωn≥10,得校正后开环传函为: .