机器人编程2(总结)
工业编程机器人实训报告

一、前言随着我国经济的快速发展,工业自动化程度不断提高,工业机器人作为一种先进的自动化设备,已经在各行各业得到了广泛应用。
为了提高学生的实践能力,培养具备实际操作技能的高素质人才,我校开设了工业编程机器人实训课程。
本文将对我校工业编程机器人实训课程进行总结报告。
二、实训目的1. 熟悉工业机器人的基本组成、工作原理和操作方法。
2. 掌握工业机器人的编程技术,能够根据实际需求编写机器人程序。
3. 学会使用工业机器人进行自动化生产,提高生产效率。
4. 培养学生的团队协作精神和创新能力。
三、实训内容1. 工业机器人基本知识(1)工业机器人的定义、分类和特点。
(2)工业机器人的组成及各部分功能。
(3)工业机器人的工作原理和应用领域。
2. 工业机器人编程技术(1)工业机器人编程语言及编程环境。
(2)机器人编程的基本方法,如直线、圆弧、圆等基本运动编程。
(3)机器人运动路径规划与优化。
(4)机器人离线编程与仿真。
3. 工业机器人应用实践(1)工业机器人操作实训,包括机器人基本操作、故障排除等。
(2)机器人编程实训,根据实际需求编写机器人程序。
(3)机器人系统集成实训,将机器人应用于实际生产中。
四、实训过程1. 理论学习在实训课程开始前,教师为学生讲解了工业机器人基本知识、编程技术等内容,使学生对工业机器人有一个全面的认识。
2. 实践操作在理论学习的基础上,学生开始进行实践操作。
首先,学生通过示教器对机器人进行基本操作训练,掌握机器人的运动控制。
然后,学生开始学习编程技术,编写机器人程序。
在编程实训过程中,学生需要运用所学知识,解决实际问题。
3. 项目实践为了提高学生的实际操作能力,实训课程设置了项目实践环节。
学生需要根据项目要求,设计机器人运动路径,编写程序,实现机器人自动化生产。
五、实训成果1. 学生掌握了工业机器人的基本操作和编程技术。
2. 学生具备了一定的项目实践能力,能够将所学知识应用于实际生产中。
3. 学生的团队协作精神和创新能力得到了提高。
实验室机器人编程实训报告
一、实验背景随着科技的飞速发展,机器人技术逐渐成为现代工业和日常生活中不可或缺的一部分。
为了提高学生的实践能力和创新能力,我们学校开展了实验室机器人编程实训课程。
本次实训旨在让学生通过学习机器人编程,掌握机器人控制原理和编程技术,提高学生的动手能力和团队协作能力。
二、实验目的1. 了解机器人编程的基本原理和编程方法;2. 掌握机器人控制系统的搭建和调试;3. 提高学生的动手能力和创新意识;4. 培养学生的团队协作精神。
三、实验内容1. 实验器材(1)机器人:型号为XX的工业机器人;(2)编程软件:XX机器人编程软件;(3)计算机:一台用于编程和控制的计算机;(4)机器人控制柜:用于给机器人供电和控制;(5)辅助工具:如螺丝刀、扳手等。
2. 实验步骤(1)机器人控制系统的搭建:根据实验要求,搭建机器人控制系统,包括机器人本体、编程软件、控制柜等;(2)机器人编程:利用编程软件编写机器人控制程序,实现特定任务;(3)机器人调试:对机器人进行调试,确保程序正常运行;(4)机器人性能测试:测试机器人完成任务的准确性和效率;(5)团队协作:分组进行实验,每个成员分工合作,共同完成任务。
3. 实验任务(1)编写机器人行走程序:实现机器人按照设定的路径行走;(2)编写机器人搬运程序:实现机器人将物体从指定位置搬运到另一指定位置;(3)编写机器人抓取程序:实现机器人抓取指定物体并放置到指定位置。
四、实验过程1. 机器人控制系统的搭建根据实验要求,搭建机器人控制系统。
首先,将机器人本体与编程软件连接,确保通信正常;其次,将机器人控制柜与编程软件连接,为机器人供电和控制;最后,将计算机与机器人控制柜连接,实现编程和控制。
2. 机器人编程利用编程软件编写机器人控制程序。
首先,分析实验任务,确定机器人需要完成的具体动作;其次,根据机器人动作,编写相应的程序代码;最后,对程序进行调试,确保程序正常运行。
3. 机器人调试对机器人进行调试,确保程序正常运行。
工业机器人编程与调试实训总结

工业机器人编程与调试实训总结
一、实训目的
工业机器人编程与调试实训旨在培养学生掌握工业机器人的编程和调
试技能,提高其对自动化生产线的理解和应用能力。
二、实训内容
1. 工业机器人基础知识介绍:包括工业机器人的种类、结构、特点等。
2. 工业机器人编程:介绍工业机器人编程语言、编程方法和编程规范等。
3. 工业机器人调试:包括安装、调整和检查等。
4. 实际操作:学生通过模拟实际生产环境进行工业机器人编程和调试。
三、实训过程
1. 理论授课:教师先进行理论授课,介绍工业机器人的基础知识和编
程调试方法。
2. 模拟实验操作:教师指导学生进行模拟实验操作,如安装夹具、设
置传感器等。
3. 编写程序:学生根据实际情况,结合所学知识,编写程序并进行调试。
4. 实际操作:学生在模拟生产环境下对工业机器人进行编程和调试。
四、实训效果
通过本次实训,学生掌握了工业机器人的基础知识和编程调试方法,提高了自动化生产线的理解和应用能力。
同时,实际操作中,学生也锻炼了自己的动手能力和团队协作能力。
五、实训体会
本次实训使我深刻认识到工业机器人在现代工业生产中的重要性。
通过实际操作,我不仅掌握了工业机器人编程和调试技能,还更加深入地理解了自动化生产线的运作原理。
同时,在团队合作中,我也学会了如何与他人协作完成任务。
这次实训是我大学期间难得的一次宝贵经历。
ABB工业机器人编程与操作 (2)
面)。
α>0°
正肘
反肘
α<0°
❖ 手腕俯/仰 ✓ 用来描述腕摆动J5(B)轴状态; ✓ 基准线:上臂中心线; ✓ 手回转中心线与基准线夹角β>0°为仰, β<0为俯,
β=0°为腕奇点(J4和J6中心线重合)。
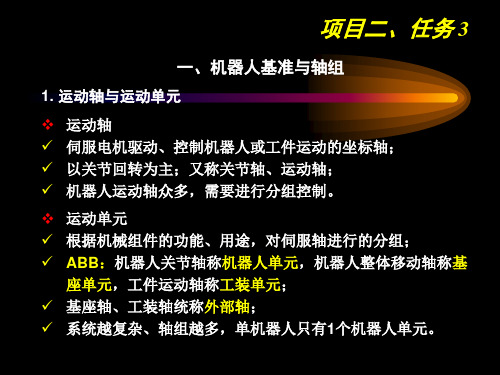
☞ 关节坐标原点及方向( ★ 基准:基座坐标系 ):
腰回转轴J1(S);以+Z轴为基准、右手定则确定方 向;上臂中心线平行+XZ平面的位置为0°。
下臂摆动轴J2(L);J1=0°时,以+Y为基准、右手 定则确定方向,下臂中心线与+Z轴平行位置为0°。
上臂摆动轴J3(U);J1、J2均0°时,以-Y轴为基 准、用右手定则确定方向,上臂中心线与+X轴平行的位 置,为0°。 腕回转轴J4(R);J1~J3均为0°时,以-X轴为基 准、用右手定则确定方向,手回转中心线与+Z轴平行的 位置为0°。 腕弯曲轴J5(B);J1~J4均为0°时,以-Y轴为基 准、用右手定则确定方向,手回转中心线与-X轴平行的 位置为0°。 手回转轴J6(T);J1~J5 均为0°时,以-X轴为基 准、用右手定则确定方向;J6轴通常可无限回转,零点 位置由工具安装法兰上的定位基准确定。
下臂中心线:机器人下臂上,与下臂摆动轴j2中心线和 上臂摆动轴j3摆动中心线垂直相交的直线 。
上臂中心线:机器人上臂上,通过手腕回转轴j4回转中 心,且与手腕摆动轴摆动中心线垂直相交的直线 。
手回转中心线:通过手回转轴J6(T)回转中心,且与 手腕工具安装法兰面垂直的直线。
二、 机器人本体坐标系
系与基座坐标系重合。
工业机器人系统编程实训心得范文7篇

工业机器人系统编程实训心得范文7篇工业机器人系统编程实训心得【篇1】在经过四年的专业课程学习之后,本学期开始学校给我们安排了实训的时间。
其实一开始脱离学校,自已也有一种迷茫和彷徨的感觉,毕竟之前没有与社会有过多的接触,自己也缺乏经验,对于上班工作没有太清晰的概念,所以心中还是有一丝忐忑。
一开始有在家复习书本上的各类基础知识,巩固自己所学的专业基础,一边也整理了一份自己的个人简历,为之后的实训工作面试做好一系列准备。
有空的时候,我也参加了各类招聘面试会,也见到了许多求职者的专业水平确实要比我们这些应届毕业生来的强硬,当然我也没有因此而失去信心,自己没有太多经验也不能就此放弃,只要有实践的机会,我相信自己总有一天也会向他们一样自信而顺利的回答应聘时所提出的各类专业问题。
经过了一系列的考虑之后,我得到了进入一家物流单位担任出纳兼文员的实训工作机会。
作为一名未来的会计人员,我才刚刚起步,平日里只有一些简单的记账工作需要我处理,教我做账的前辈也时刻提醒我,不要止步于此,往后的工作中我会学到更多的东西,并且有很多东西需要我自己去挖掘。
况且会计学科是一门实践操作性很强的学科,所以在校时期的会计理论教学与会计模拟实训如同车之两轮鸟之两翼,两者有机衔接紧密配合,才能显著提高我们掌握所学内容的质量。
还有就是作为一名未来的会计人员,我们应该具有较高的职业道德和专业素养。
因此我们要本着理论结合实际的思想,要做一个在动手能力更强的合格的会计人员。
还有就是在工作中我发现人际关系人与人之间的交往也是一项需要去注意的关键问题,要与身边一起工作的同时和睦相处也能让自己在工作之余有个放松的良好心情,与人交流需要学会懂得聆听,特别是像我这种刚入门的年纪尚清资历尚浅的后辈,多虚心听取前辈们的工作经验,对自己的日常工作也有很多帮助,要对前辈的嘱咐虚心接受,尊重他们的立场,与他们交流自己的工作烦恼,他们也会很乐意的帮助我开导我。
在培训中,我首先掌握了书写技能,如金额大小写,日期,收付款人等等一些基本的书面的填写。
机器人编程实践-ros2基础与应用
机器人编程实践-ros2基础与应用ROS2是机器人操作系统(Robot Operating System)的第二代版本,它提供了一套完整的软件框架,用于构建机器人应用程序。
ROS2基于DDS(Data Distribution Service)通信协议,具有更好的性能和可靠性,同时支持多种操作系统和编程语言,使得机器人开发更加灵活和便捷。
一、ROS2基础1. ROS2架构ROS2架构由两部分组成:ROS2核心和ROS2工具。
ROS2核心包括ROS2运行时、ROS2通信、ROS2消息和ROS2服务等组件,ROS2工具包括ROS2命令行工具、ROS2图形化工具和ROS2开发工具等。
2. ROS2安装ROS2支持多种操作系统,包括Ubuntu、Debian、Fedora、CentOS等。
安装ROS2需要先添加ROS2软件源,然后安装ROS2包。
安装完成后,需要设置ROS2环境变量,以便在终端中使用ROS2命令。
3. ROS2通信ROS2通信基于DDS协议,支持点对点通信和发布/订阅通信。
发布/订阅通信是ROS2最常用的通信方式,它通过话题(Topic)实现数据的发布和订阅。
发布者(Publisher)将数据发布到话题中,订阅者(Subscriber)从话题中订阅数据。
4. ROS2消息ROS2消息是数据的载体,它定义了数据的类型和格式。
ROS2支持多种消息类型,包括基本类型、数组类型和自定义类型等。
用户可以根据需要定义自己的消息类型。
二、ROS2应用1. ROS2机器人控制ROS2可以用于机器人控制,包括运动控制、传感器数据采集和处理等。
用户可以使用ROS2提供的控制器和驱动程序,也可以自己编写控制器和驱动程序。
2. ROS2机器人感知ROS2可以用于机器人感知,包括视觉、声音、激光雷达等。
用户可以使用ROS2提供的感知库和算法,也可以自己编写感知程序。
3. ROS2机器人导航ROS2可以用于机器人导航,包括路径规划、障碍物避难和定位等。
KUKA机器人编程手册[2]
![KUKA机器人编程手册[2]](https://img.taocdn.com/s3/m/d37200c2951ea76e58fafab069dc5022aaea4694.png)
KUKA机器人编程手册KUKA编程手册一、系统简介1.1 系统组成本体:由机械臂、电动机、传感器、电缆等组成,负责执行物理运动。
控制柜:包含电源模块、驱动模块、控制模块、通信模块等,负责控制和监测的运行状态。
操作面板:提供了一个触摸屏和一些按键,用于与进行交互和操作。
外部设备:根据不同的应用场景,可以连接一些外部设备,如工具、传送带、视觉系统等,以实现更复杂的功能。
1.2 操作系统实时内核:负责处理与运动相关的实时任务,如轨迹规划、运动控制、碰撞检测等。
用户界面:负责提供一个图形化的用户界面,让用户可以通过操作面板或者远程终端来访问和操作系统。
应用软件:负责提供一些预定义或者自定义的应用软件,让用户可以根据不同的需求来配置和使用系统。
1.3 应用软件KUKA.ControlStudio:是一个集成开辟环境(IDE),让用户可以使用图形化或者文本化的方式来编写和调试程序。
KUKA.PC.API:是一个应用程序接口(API),让用户可以使用C或者其他.NET语言来开辟基于PC的远程控制或者监控应用程序。
KUKA.MC-Basic:是一种基于文本的编程语言,让用户可以使用类似于BASIC语言的语法来编写和运行程序。
二、学习手动挪移在开始编写和运行程序之前,需要先学习如何手动挪移。
手动移动有助于熟悉的结构和运动范围,以及检查是否正常工作²。
2.1 启动和住手要启动或者住手,需要使用操作面板上的开关键²:自动模式:在自动模式下,会根据预设的程序自动运行,不需要用户干预。
这种模式合用于正式的生产环境。
手动模式:在手动模式下,会根据用户的操作进行挪移,不会执行任何程序。
这种模式合用于学习和调试的目的。
住手键:按下住手键后,会即将住手运动,并进入待机状态。
如果浮现故障或者危(wei)险情况,可以随时按下住手键来紧急住手。
2.2 使用操作杆挪移要使用操作杆挪移,需要先将操作面板上的启动模式切换到手动模式²。
机器人编程期末总结

机器人编程期末总结一、引言在本学期的机器人编程课程中,我学习了机器人编程的基本原理和方法,了解了机器人编程在现代社会中的重要作用。
通过本课程的学习,不仅提高了我的编程技能,还深入理解了机器人的工作原理和各种编程技术。
以下是我在本学期机器人编程课程中的总结和感悟。
二、课程内容回顾1. 机器人基础知识在课程开始的前几周,我们学习了机器人的基本概念和分类,了解了机器人的结构、传感器以及执行器的工作原理。
通过学习机器人基础知识,我对机器人的工作原理有了更深入的理解,为后续的编程学习打下了良好的基础。
2. 机器人编程语言本课程中我们主要学习了两种机器人编程语言,分别是Python和ROS(机器人操作系统)。
Python是一种简单易学的编程语言,适合初学者入门;而ROS是一种专门为机器人设计的开源操作系统,提供了丰富的机器人编程功能和工具。
通过学习这两种编程语言,我不仅学会了如何编写简单的机器人程序,还学会了如何使用ROS进行机器人的高级编程。
3. 机器人视觉和感知机器人的视觉和感知是机器人能够与环境进行交互的重要组成部分。
在课程中,我们学习了机器人的视觉和感知技术,包括图像处理、目标检测和物体跟踪等。
通过学习这些知识,我了解了机器人如何通过传感器获取环境信息,并根据这些信息做出相应的动作。
4. 机器人路径规划和导航机器人路径规划和导航是机器人能够进行自主移动的核心技术。
在课程中,我们学习了机器人的路径规划和导航算法,包括A*算法和Dijkstra算法等。
通过学习这些算法,我了解了机器人如何通过地图和传感器信息来确定最优路径,并进行自主导航。
5. 机器人控制和调试机器人的控制和调试是机器人编程的重要环节。
在课程中,我们学习了机器人控制和调试的方法和技巧,包括编写控制程序、调试程序以及处理机器人故障等。
通过学习这些知识,我能够更好地控制和调试机器人,提高机器人的工作效率和准确性。
三、学习收获通过本学期的机器人编程课程学习,我收获了很多:1. 提高了编程能力通过学习机器人编程,我熟练掌握了Python和ROS等编程语言,能够独立编写机器人程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人编程2
一、专家界面介绍
1、用户组类别:操作人员及应用人员、专家、管理员、安全维护人员(激活安全配置)、安全投入运行人员;
2、在一定的持续时间内未对操作界面进行任何操作时(300秒),自动退出专家界面;
3、fold的句法为:(1);FOLD名称(2)指令(3);ENDFOLD <名称>;
二、变量和协定
1、标准数据类型:整型(INT)、实型(REAL)、布尔型(BOOL)、字符型(CHAR);
2、数组(Array):借助下标保存相同数据类型的多个变量;例:Voltage[10] = 12.75;
3、枚举(ENUM):所有值在创建时会用名称(明文)进行定义;例:color = #red;
4、结构(STRUC):由不同数据类型的数据项组成的复合数据类型;例:Date = {day 14, month 12, year 1996};
5、运行时间变量:存在于SCR文件中,仅在声明的程序段中有效,在到达程序的最后一行(END行)时重新释放存储位置;
6、系统数据类型:枚举,例:运行方式(mode_op);结构,例:日期/时间(date);
7、声明的关键词为DECL,对于四种简单数据类型关键词DECL可省略;
8、常量用关键词CONST建立,且只允许在数据列表中建立;
9、变量生存期:SRC文件,程序运行结束时,运行时间变量“死亡”;DAT文件,程序运行结束后变量还保持着;
10、字符串或文本只能作为CHAR数组来实现;
11、关键词PUBLIC扩展程序头中的数据列表,创建全局变量;例: DEFDAT MY_PROG PUBLIC;
12、常量必须在声明时立即初始化;
13、运算类型:基本运算、比较运算、逻辑运算、位运算(B_NOT、B_AND、B_OR、B_EXOR);
14、纯整数运算的中间结果去掉所有小数位;例:int F=10,F=F/4(F=2),省去小数点后面的尾数;int F=10,REAL W=10.0,F=W/4(F=3),四舍五入为整数;
15、KRL仅支持1维、2维、3维数组;
16、定义结构后还必须对其声明工作变量;
17、结构通过括号初始化时,只允许使用常量,赋值顺序任意;初始化结构时,不必指出全部结构元素;
18、结构初始化可以通过点号进行,例:my_car.price = 9999.0;通过点号进行初始化时也可以使用变量,例:my_car.price = value_car;
19、自定义的结构类型以TYPE结尾;
20、枚举数据类型由常量组成,一个常量的赋值始终以符号“#”进行;
21、自定义的枚举类型以TYPE结尾;
三、子程序和函数
1、最多可相互嵌入20个子程序;
2、用RETURN可结束子程序,并由此跳回到调用该子程序的程序模块中;
3、局部子程序写入END,用回车键确认后,会在主程序和子程序之间插入一个横条;
4、作为IN参数的参数传递:变量值在主程序中保持不变;子程序只读取变量值,不能写入;
5、作为OUT参数的参数传递:变量值在主程序中同时更改;子程序读取并更改该值,然后返回新值;
6、数组只允许以参数OUT的方式进行传递,且只能被整个传递到一个新的数组中;
7、传递整个数组:FELD_1D[ ](1 维),FELD_2D[ ,](2 维),FELD_3D[ ,,](三维);
8、可以传递单个数组元素,但只允许变量作为目标;
9、最先发送的参数被写到子程序中的第一个参数上,以此类推;
10、函数是一种向主程序返回某一值的子程序,数值通过指令RETURN(return_value ) 传递;
11、指令RETURN( return_value) 必须在指令ENDFCT之前;
12、KUKA标准函数:数学函数、字符串变量函数、信息输出函数;
13、数学函数:绝对值【ABS(x)】、平方根【SQRT(x)】、正弦【SIN(x)】、余弦【COS(x)】、正切【TAN(x)】、反余弦【ACOS(x)】、反正切;
14、字符串函数:声明时确定字符串长度【StrDeclLen(x)】、初始化后的字符串变量长度【StrLen(x)】、删除字符串变量的内容【StrClear(x)】、扩展字符串变量【StrAdd(x,y)】、比较字符串变量的内容【StrComp( x,y,z)】、复制字符串变量【StrCopy(x,y)】;
15、信息函数:设置信息【Set_KrlMsg(a,b,c,d)】、设置对话【Set_KrlDLg(a,b,c,d)】、检查信息【Exists_KrlMsg(a)】、检查对话【Exists_KrlDlg(a,b)】、删除信息【Clear_KrlMsg(a)】、读取信息缓存器【Get_MsgBuffer(a)】;
16、数学函数返回REAL值,字符串函数和信息函数返回BOOL或INT值;
四、用系统变量工作
1、计时器启动:$TIMER_STOP[Nr] = FALSE;
2、计时器停止:$TIMER_STOP[Nr] = TRUE;
3、计时器复位:$TIMER[Nr] = 0;
4、计时器启动和停止时,必须先触发预进停止;
五、使用程序流程控制
1、if分支
2、switch…case分支:可使用的数据类型为INT、CHAR、ENUM;
3、LOOP循环:可通过EXIT指令立即退出;
4、FOR循环:FOR counter= start TO last STEP increment,……,ENDFOR;可通过EXIT指令立即退出;
5、当型(while型)循环:也称为前测试循环,可通过EXIT指令立即退出;
6、直到型(REPEAT型)循环:也称为后测试循环;REPEAT,……,UNTIL condition;可通过EXIT指令立即退出;
7、时间等待函数:最长时间为2147484秒,相当于24.8天;最短的有意义的时间单元是0.012秒;如果给出的时间为负值,则不等待;
8、信号等待函数:用指令CONTINUE可阻止预进停止;
六、KRL的切换函数
1、输出端的切换将生成预进停止,用指令CONTINUE可阻止预进停止,CONTINUE仅涉及下一行(包括空行);
2、如果编程设定了轨迹逼近,则将在向目标点进行轨迹逼近运动的中点切换;例:$OUT_C[30]=TRUE;
3、PULSE(脉冲)指令触发预进停止;
4、句法:PULSE(信号,电平,脉冲宽度);信号只允许使用OUT[Nr]和信号变量;TRUE表示高电平,FALSE表示低电平;
5、句法:TRIGGER WHEN DISTANCE=位置DELAY=时间DO 指令<PRIO=优先级>;位置中0表示起点触发,1表示目标点触发;如果优先级由系统自动给出,则PRIO = -1;
6、句法:TRIGGER WHEN PATH=行程段DELAY=时间DO 指令<PRIO=优先级>;行程段中正值表示向运动结束方向推送指令,负值表示向运动开始方向推送指令;只允许为LIN和CIRC 指令,不允许使用PTP指令;。