热工系统纯迟延过程的控制策略研究
纯滞后控制技术

1 e T / T 1 e T / T z 1
2、振铃现象及其消除 所谓振铃(Ringing)现象,是指数字控制器的输出u(k) 以1/2采样频率(2T采样周期) 大幅度上下摆动。振铃 现象对系统的输出几乎无影响,但会增加执行机构的磨 损,并影响多参数系统的稳定性。 例:被控对象传递函数为: G p ( s )
常规及复杂控制技术(三)
纯滞后控制技术
主要内容
1、施密斯(Smith)预估控制 2、达林(Dahin)算法
5.3.1 史密斯(Smith)预估控制
在实际生产过程中,大多数工业对象具有较大的纯滞后 时间。对象的纯滞后时间τ对控制系统的控制性能极为不利。 当对象的纯滞后时间τ与对象的时间常数Tc之比, 即τ/ Tc≥0.5时,采用常规的PID控制来克服大纯滞后是很难适应的, 而且还会使控制过程严重超调,稳定性变差。 长期以来,人们对纯滞后对象的控制作了大量的研究。 但在工程实践上有效的方法还是不多。比较有代表性的方法 有大林算法和史密斯预估算法。
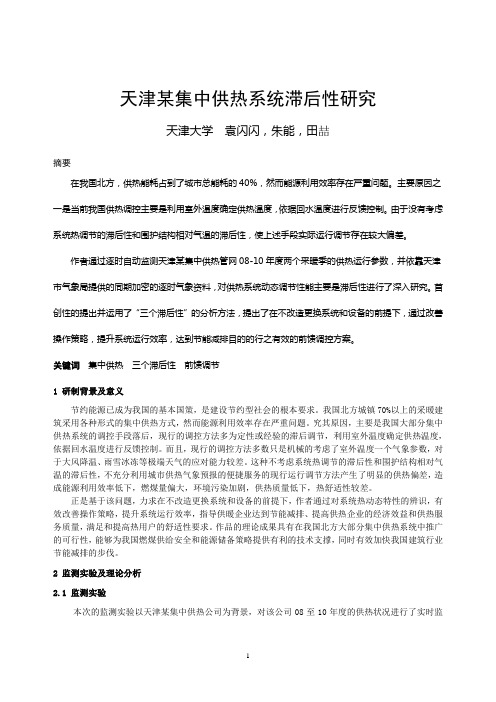
给定(蓝)与系统响应(黑)
1.4
1.2
1
0.6 0.4 0.2 0
0.8
0.6
0.4
-0.2 -0.4 -0.6
0.2
0
2
4
6
8
10
12
14
16
18
20
0
0
2
4
6
8
10
12
14
16
18
20
(1)振铃现象的分析
系统的输出Y(z)和数字控制器的输出U(z)间有下列关系: Y(z)=U(z)G(z) 系统的输出Y(z)和输入函数的R(z)之间有下列关系: Y(z)=Ф(z)R(z) 则数字控制器的输出U(z)与输入函数的R(z)之间的关系:
一种大迟延系统的控制方法
一种大迟延系统的控制方法马平;李奕杰【摘要】大迟延系统在工业生产过程中比较常见但又难以控制,并且大部分工业生产过程都具有非线性的特征,被控对象的传递函数随负荷的变化而变化.在利用传统串级PID对实际系统进行控制的时候,很难得到理想的控制效果,难以保证控制品质,因此针对此问题提出基于物理机理的PID控制方法.该方法的控制策略主要是基于被控对象和控制过程的物理机理,使其可以不需要经过复杂的计算和补偿环节,取消了串级控制回路,从而使系统结构更加简单有效,控制性能得到较大改善,可适应大范围负荷变化的需要.由于火电厂主汽温为典型的大惯性、大迟延、非线性系统,被控对象的传递函数随负荷的变化而改变,所以选取主汽温为被控对象进行仿真实验.实验结果证明,基于物理机理的PID控制与传统串级PID相比,可以达到更好的控制效果.%In the industrial production process,the large delay system is comparatively common and get difficult to be controlled one. Most of them are nonlinear and their transfer function varies with load. U-sing traditional serial PID for control of practical system, it is difficult to get an ideal control effect and hard to ensure the control quality. In view of above-mentioned facts, a physical mechanism-based PID control method was presented. Its control strategies were mainly based the physical mechanism of the controlled objects and control process without complex calculation and compensation link, where the cascade control loop was canceled, so that the system structure became simpler and more effective, and its control performance got very great improvement, meeting the requirement of wide range of load variation. In power plant, the mainsteam temperature is a typical large-inert, long delayed, and nonlinear system. The transfer function of the controlled object varies with the load. Therefore, the main steam temperature was taken as the controlled object to carry out the simulation experiment. The experimental result showed that, compared with the traditional cascade PID control, the PID control based on physical mechanism would be able to achieve better control effect.【期刊名称】《兰州理工大学学报》【年(卷),期】2012(038)006【总页数】4页(P66-69)【关键词】基于物理机理的PID控制;过热汽温;扰动;大迟延【作者】马平;李奕杰【作者单位】华北电力大学自动化系,河北保定071000;华北电力大学自动化系,河北保定071000【正文语种】中文【中图分类】TP273大迟延系统在工业生产过程中比较常见但又是难以控制的,一直是控制界关注的研究方向[1].利用传统串级PID对实际系统进行控制的时候,得到理想的控制效果相当困难,难以保证控制品质[2].而基于物理机理的PID控制可以很好地解决此问题.并且通过仿真实验与传统的串级PID控制效果比较,更能突显出基于物理机理的PID控制的优势.1 基于物理机理的PID控制1.1 传统串级PID控制的缺陷现在工程上针对大惯性大迟延系统往往采用串级PID控制.串级系统和简单系统有一个显著的区别,即其在结构上形成了两个闭环.一个闭环在里面,被称为副环或者副回路,在控制过程中起着“粗调”的作用;一个环在外面,被称为主环或主回路,用来完成“细调”任务,以最终保证被调量满足工艺要求[3].系统内回路整定后可约等于1,此时系统的震荡频率取决于系统的惰性区G01(s),而G01(s)仍然为具有较大迟延的对象,因此这种控制结构在负荷扰动下,系统超调量大、调节时间长的特性不能得到有效的改善.1.2 基于物理机理的PID控制原理对于大惯性大迟延系统基于物理机理的PID控制的控制策略主要基于被控对象和过程的物理机理,可以不需要复杂的计算和补偿环节,取消了串级控制回路,系统结构更加简单、有效,可适应大范围负荷变化的需要[4].基于物理机理的PID控制的系统原理如图1所示,其中K为调整因子,G01(s)为系统的惰性区,G02(s)为导前区.图1 基于物理机理的PID控制系统结构Fig.1 Configuration of physical mechanism-based PID control system系统构建了基于对象机理模型的局部反馈G′01(s),反馈与对象相关联,系统在本质上变成开环,消除了系统的震荡和超调.系统的开环传递函数如下:得出系统的特征方程为代入式(1)以及系统的特征方程,得出:当时,系统的特征方程转化为则式(1)可简化为化简后系统的原理图如图2所示.可以看出,系统的震荡频率取决于G02(s),而对于大惯性大迟延的系统,往往G02(s)的震荡频率比G01(s)小很多,调节对象成为快速响应对象而不再是大惯性对象,参数整定十分容易,系统的震荡频率减小,调节器的输出更加平和,调节器出现震荡的可能性大大减小,负荷扰动下,系统超调量大,调节时间长的特性得到了有效改善.图2 基于物理机理的PID控制系统化简后方框原理图Fig.2 Simplified block diagram of physical mechanismbased PID control system系统的误差传递函数为得出系统的稳态误差为将式(1,3,4)代入式(7)可得当s→0时,GPID(s)→∞,1+GPID(s)G02(s)可以等效为GPID(s)G02(s),所以稳态误差为g(s)是动态环节,可表示为,当s→0时,g(s)等于1,所以得出系统的稳态误差等于0.2 基于物理机理的火电厂过热汽温控制设计2.1 过热汽温对象特性分析由火电厂主汽温在不同负荷下的被控对象传递函数[5](见表1)即可以得出其为大惯性、大迟延、非线性的系统,被控对象的传递函数随负荷的变化而改变.目前电厂过热器调节方法主要采用喷水减温方法,过热蒸汽温度控制系统采用串级控制或导前汽温微分信号的双回路控制[6].当工况变化大时,难以保证控制品质,因而考虑采用基于物理机理的PID汽温调节.表1 不同负荷下的被控对象传递函数Tab.1 Transfer function of controlled object with different loads负荷/%导前区惰性区100 G02(s)=1.58(14s+1)2 G01(s)= 2.45(15.8s+1)4 88 G02(s)=2.01(16s+1)2G01(s)= 2.09(22.3s+1)4 62 G02(s)=4.35(19s+1)2 G01(s)= 1.83(28.2s+1)4 44 G02(s)=6.62(21s+1)2 G01(s)= 1.66(39.5s+1)42.2 基于物理机理过热汽温结构设计根据过热汽温的实际情况,得出基于物理机理的PID控制的过热汽温控制原理图如图3所示,图3依然可以简化为图2的形式.其中,输入为过热器出口汽温设定值Tsp,输出为过热器出口汽温Tout,实际工程中通过f(x)来实现K的取值,,K为G01(s)在不同负荷下的增益的倒数.图3 过热汽温的基于物理机理的PID控制系统结构Fig.3 Configuration of physical mechanism-based PID control system for superheated steam temperature control当G′01(s)与实际 G01(s)的特性充分接近时则整个动态调整过程基本维持恒定,整个汽温调节系统转换为以过热器进口汽温为对象的单回路系统[7].模拟的过热器特性的G′01(s)随着负荷的改变会发生变化,即可以通过负荷与多容环节时间常数的关系曲线实现不同负荷下的过热器的特性.同时调整因子也随负荷的变动而发生改变.过热器特性的G′01(s)和调整因子并不总是很准确的,但 Tout总能稳定到设定点[8].本文分别针对负荷为100%、88%、62%、44%的情况对被控对象进行研究.被控对象传递函数见表1.2.3 仿真研究为了检验证明本文提出的控制策略的有效性和优越性,根据在不同负荷系统出现的不同扰动,做了两组扰动仿真实验,并和传统串级PID加入同样的扰动进行比较. 过热汽温基于物理机理的PID控制的系统原理如图3所示,因为G′01(s)模拟的是过热器的特性,G′01(s)的模型为在不同负荷下分别加入给定值扰动和调节量扰动,系统的响应曲线如图4和图5所示,虚线为常规串级PID控制,实线为基于物理机理的PID控制.图4 四种不同负荷下给定值扰动的响应曲线Fig.4 Curves of response of system with four different loads to definite-valued disturbance图5 四种不同负荷下调节量扰动下的响应曲线Fig.5 Curves of response of system with four different loads to disturbance of adjusting magnitude从仿真结果可以看出,相对于常规的PID控制策略,采用基于物理机理的PID控制策略在出现调节量扰动时有更小的超调,并且调节时间要短.本文在对负荷扰动进行研究时,将100%、88%负荷作为第一组,62%、44%负荷作为第二组,即把100%负荷下的G01(s)换成88%负荷下的G01(s),88%负荷下的G01(s)换成100%负荷下的G01(s),观察控制效果的变化,第二组做同样的研究,并与串级相同的扰动仿真,然后进行比较.系统的响应曲线如图6所示,虚线为常规PID控制,实线为基于物理机理的PID控制.图6 四种负荷扰动下不同负荷扰动下的响应曲线ig.6 Curves of system response to disturbance of four loads从仿真结果可以看出,相对于常规的PID控制策略,采用基于物理机理的PID控制策略在出现负荷扰动时有更小的超调,并且调节时间要短.3 结论本文针对大惯性、大迟延、非线性系统提出了一种基于被控对象和过程物理机理的PID控制策略,使其可以不需要复杂的计算和补偿环节,取消了串级控制回路,从而使系统结构更加简单和有效,可适应大范围负荷变化的需要.通过以火电厂主汽温为被控对象的仿真,验证了基于物理机理的PID控制策略的有效性和较传统串级PID控制的优越性.基于物理机理的PID控制策略不仅具有更小的超调量、更强的抗干扰能力和更好的自适应性,并且算法原理简单,使其可以方便地应用于工业控制中,具有很好的工业应用前景.参考文献:[1]李长更,刘友宽,苏杰.模型算法控制对大迟延系统的控制效果研究[J].仪器仪表用户,2010,17(4):5-7.[2]王丽珍.模糊PID控制器在过热汽温控制中的应用[J].机械工程与自动化,2009(1):129-131.[3]金以慧,方崇智.过程控制[M].北京:清华大学出版社,2009:112-114. [4]夏明.超临界机组汽温控制系统设计[J].中国电力,2006,39(3):74-77.[5]李建强,杨铎烔.基于灰色预估PID控制的过热汽温控制[J].华北电力大学学报:自然科学版,2011,38(1):71-74.[6]车得福,庄正宁,李军,等.锅炉[M].西安:西安交通大学出版社,2004:276-282.[7]张华,孙奎明,张磊.热工自动化[M].北京:中国电力出版社,2010:76-78.[8]李致远.基于单神经元自适应PID的过热汽温控制系统研究[J].工业控制计算机,2011,23(8):65-66.。
纯滞后控制系统
过程控制实验报告实验名称:纯滞后控制系统班级:姓名:学号:实验五 纯滞后系统一、实验目的1) 通过本实验,掌握纯滞后系统的基本概念和对系统性能的影响。
2) 了解纯滞后系统的常规控制方法和史密斯补偿控制方法。
二、 实验原理在工业生产中,被控对象除了容积延迟外,通常具有不同程度的纯延迟。
这类控制过程的特点是:当控制作用产生后,在滞后时间范围内,被控参数完全没有响应,使得系统不能及时随被控制量进行调整以克服系统所受的扰动。
因此,这样的过程必然会产生较明显的超调量和需要较长的调节时间。
所以,含有纯延迟的过程被公认为是较难控制的过程,其难控制程度随着纯滞后时间与整个过程动态时间参数的比例增加而增加。
一般认为,纯滞后时间与过程的时间常数之比大于0.3时,该过程是大滞后过程。
随此比值增加时,过程的相位滞后增加而使超调增大,在实际的生产过程中甚至会因为严重超调而出现聚爆、结焦等事故。
此外,大滞后会降低整个控制系统的稳定性。
因此大滞后过程的控制一直备受关注。
前馈控制系统主要特点如下:1) 在纯滞后系统控制中,为了充分发挥PID 的作用,改善滞后问题,主要采用常规PID 的变形形式:微分先行控制和中间微分控制。
微分先行控制和中间微分控制都是为了充分发挥微分作用提出的。
微分的作用是导前,根据变化规律提前求出其变化率,相当于提取信息的变化趋势,所以对滞后系统,充分利用微分作用,可以提前预知变化情况,进行有效的“提前控制”。
微分先行和中间微分反馈方法都能有效地克服超调现象,缩短调节时间,而且不需特殊设备。
因此,这两种控制形式都具有一定的实际应用价值。
但是这两种控制方式都仍有较大超调且响应速度很慢,不适于应用在控制精度要求很高的场合。
2) 史密斯补偿控制的基本思路是:在控制系统中某处采取措施(如增加环节,或增加控制支路等),使改变后系统的控制通道以及系统传递函数的分母不含有纯滞后环节,从而改善控制系统的控制性能及稳定性等。
基于Matlab参数辨识的纯迟延系统预估控制在火电厂的应用
基于Matlab参数辨识的纯迟延系统预估控制在火电厂的应用邢红涛【摘要】在探讨Smith预传器的控制原理的基础上,针对制约其工程应用的参数估计问题阐述了一种用Matlab软件计算的工程案例.在分析其应用前景的同时,提出将DCS控制系统、Matlab软件和Smith控制有机结合的思路.【期刊名称】《河北电力技术》【年(卷),期】2008(027)004【总页数】3页(P12-13,27)【关键词】纯迟延;预估控制;Smith预估器;Matlab参数辨识【作者】邢红涛【作者单位】河北省电力研究院,石家庄,050021【正文语种】中文【中图分类】TP2721 概述在工业过程控制中,许多被控对象具有纯迟延的性质,在火电厂自动控制系统中也是如此。
这些系统由于能量或物料在介质中的传输,使被控参数惯性大,不能及时反映扰动量或控制量的变化。
在工业过程控制领域以传统PID控制为主,对于不能及时反馈偏差变化的纯迟延系统,PID控制这种基于偏差的控制方式,控制效果较差。
在应用于某些时滞大的对象时,还可能出现系统闭环稳定性降低、动态过程变差、调节品质恶化的现象。
所以,大惯性的纯迟延过程在传统控制领域是公认的控制难题。
2 Smith预估器的控制原理Smith预估器是一种对大迟延系统进行补偿的控制算法。
该方法的基本原理是:在获取控制对象的基本结构和参数的前提下,由预估器对时滞进行补偿,使被延迟的被调量(偏差)提前反映,从而减小纯迟延造成的影响,提高系统的稳定性和控制品质。
如图1所示的控制系统,其闭环传递函数为:φ(1)图1 带纯迟延控制系统的等效框图其中,R为输入,E1为偏差,D为扰动,X为被控对象输出,Y为输出信号,GC、G0为传递函数。
其特征方程为1+GC(S)G0(S)e-ts=0。
可见特征方程中出现了纯迟延环节,使系统的稳定性降低。
如果t足够大,系统将会失去稳定。
对系统的内部特征进行分析后可知道,信号X在进入纯迟延环节前是没有延迟的,输出信号Y 是X经t延迟后的重复。
基于物理机理的大迟延过程控制方法研究

p e n s a t i o n,S O t h e s y s t e m s t r u c t u r e b e c o me s mo r e s i mp l e a n d e f f e c t i v e ,a n d t h e c o n t r o l p e r f o r ma n c e i s g r e a t l y i m—
t r o l l e d o b j e c t s a n d c o n t r o l p r o c e s s , m a k e c o n t r o l l e r s w o r k w i t h o u t c a s c a d e c o n t r o l l o o p , c o m p l e x c a l c u l a t i o n a n d c o n —
法 。基于物理机理的 P I D控制的主要思想是基 于被控对 象和控制过程 的物理机理 , 使其可以不需要经过复杂 的计算和补偿
环节 , 取消 了串级控制 回路 , 从而使系统结构更加 简单有效 , 控制性能得到很大的改善。通过对粒子群优化算法 ( P S O) 的研
究, 对这种控制器参数进行优化。以火电厂主汽温 为被控对象进行仿真研究 , 实验证 明基 于物理 机理的 P I D控 制与传统 串
me c h a n i s m.T h e ma i n i d e a o f P I D c o n t r o l b a s e d o n p h y s i c l a me c h a n i s m i s t o c o n s i d e r t h e p h y s i c l a me c h a n i s m o f c o n —
高等过程控制—第5章纯滞后
可以推导出系统的闭环传递函数为:
WT ( s )W0( s )e s Y ( s) R( s ) 1 WT ( s )W0( s )e s WT ( s )W0( s )(1 e s )
' -s WT (s)W (s)e -s 0 W (s)e 1 ' 1 WT (s)W (s) 0
二、控制通道的特征参数对控制质量的影响
(一)放大系数Ko对控制质量的影响 控制通道的放大系数KP· Ko 是一种互补关系,如果KP保 持不变,Ko增大时控制系统的稳定性裕度下降,被调量的 动、静态偏差增大,控制系统的过渡过程的时间将加长 。
二、控制通道的特征参数对控制质量的影响
(二)时间常数、迟延时间对控制质量的影响 (1)n阶惯性对象对控制质量的影响 讨论时间常数T和阶次n 控制通道的时间常数T如果增大,系统的反应速度慢,工作频率 将下降,系统的过渡过程的时间将加长,减小控制通道的时间常数, 能提高控制系统的控制质量。 惯性对象阶次n越大对被调量的影响越慢,调节的也越慢,使 控制系统的动态偏差、控制过程的时间增大,稳定性裕度减小。
第五章
纯滞后补偿控制系统
第一节、对象特性对控制质量的影响 第二节、补偿纯迟延的常规控制 第三 节、预估补偿控制
第一节 对象特性对控制质量的影响
干扰作用 控制作用
干扰通道
W0μ (s)
热工对象
W0λ (s) 被调量
控制通道
控制质量是用衰减率或衰减比n、动态偏差ym()、静态 偏差y()或e()、控制时间ts等 。 描述对象特性的特征参数是放大系数K 、时间常数Tc(T)、 迟延时间τ(n) 。
(1) 微分先行控制方案:微分作用串联在反馈回路上
大迟延控制系统设计
引言在热工生产中,最基本的且应用最多的是单回路控制系统,其他各种复杂控制系统都是在单回路系统的基础上发展起来的,而且许多复杂控制系统的整定都是利用了单回路系统的整定方法,可以说单回路控制系统是过程控制系统的基础。
生产控制是利用过程检测控制仪表、自动化设备与装置、数字计算机等自动化技术工具。
对整个生产过程进行自动检测与控制,以期达到各种最优的技术、经济指标。
被控对象动态特性有迟延(也叫延迟或滞后)。
因为对象的大设备、大存储容量、大惯性及阻力,使被控参数不可能立即响应而有延迟。
时间延迟有传输延迟与容量延迟之分。
传输延迟(也称纯延迟)是因为物料或能量需要经过一个传输过程而造成的;而容量延迟则是由于对象中包含有多个容积所造成的。
当过程的纯延迟时间与其动态τ时,则被控对象就被认为是较大延迟对象了。
时间常数T的关系满足3.0T/≥在冶金、机械、石油、化工、电力、轻工、建材、原子能与环保等部门生产中,大量需要对温度、压力、流量、液位、成分等物理量实现自动控制。
生产过程自动控制是一门内容极为丰富的综合性应用科技学科。
它与工程实践联系紧密,与电力拖动自动控制系统一样,在现代化生产自动化中也得到了十分广泛的应用。
生产过程中,有些工艺参数目前还没有获得直接的快速测量手段,如火电厂进入磨煤机的原煤干燥程度的测量。
这种情况下往往采用间接测量手段,如采用磨煤机入口介质的温度来代表原煤的干燥程度。
以间接参数作为系统地被调量,要求被调量与实际所需维持的工艺参数之间为单值函数关系,否则要采取相应的补偿措施。
对于那些虽有直接测量手段,但所测得的信号过于微弱或延迟较大的情况,不如选用间接参数作为系统的被调量。
为提高测量的灵敏度,减小延迟,应采用先进的测量方法,选择合理的采样点,正确合理的安排检测元件。
第一章绪论目前在工业生产过程控制中,主要应用模拟控制仪表构成各种类型的控制系统。
随着科学技术的发展,电子计算机控制是热工自动控制系统发展的必然趋势。
011 天津某集中供热系统滞后性研究
天津某集中供热系统滞后性研究天津大学袁闪闪,朱能,田喆摘要在我国北方,供热能耗占到了城市总能耗的40%,然而能源利用效率存在严重问题。
主要原因之一是当前我国供热调控主要是利用室外温度确定供热温度,依据回水温度进行反馈控制。
由于没有考虑系统热调节的滞后性和围护结构相对气温的滞后性,使上述手段实际运行调节存在较大偏差。
作者通过逐时自动监测天津某集中供热管网08-10年度两个采暖季的供热运行参数,并依靠天津市气象局提供的同期加密的逐时气象资料,对供热系统动态调节性能主要是滞后性进行了深入研究。
首创性的提出并运用了“三个滞后性”的分析方法,提出了在不改造更换系统和设备的前提下,通过改善操作策略,提升系统运行效率,达到节能减排目的的行之有效的前馈调控方案。
关键词集中供热三个滞后性前馈调节1 研制背景及意义节约能源已成为我国的基本国策,是建设节约型社会的根本要求。
我国北方城镇70%以上的采暖建筑采用各种形式的集中供热方式,然而能源利用效率存在严重问题。
究其原因,主要是我国大部分集中供热系统的调控手段落后,现行的调控方法多为定性或经验的滞后调节,利用室外温度确定供热温度,依据回水温度进行反馈控制。
而且,现行的调控方法多数只是机械的考虑了室外温度一个气象参数,对于大风降温、雨雪冰冻等极端天气的应对能力较差。
这种不考虑系统热调节的滞后性和围护结构相对气温的滞后性,不充分利用城市供热气象预报的便捷服务的现行运行调节方法产生了明显的供热偏差,造成能源利用效率低下,燃煤量偏大,环境污染加剧,供热质量低下,热舒适性较差。
正是基于该问题,力求在不改造更换系统和设备的前提下,作者通过对系统热动态特性的辨识,有效改善操作策略,提升系统运行效率,指导供暖企业达到节能减排、提高供热企业的经济效益和供热服务质量,满足和提高热用户的舒适性要求。
作品的理论成果具有在我国北方大部分集中供热系统中推广的可行性,能够为我国燃煤供给安全和能源储备策略提供有利的技术支撑,同时有效加快我国建筑行业节能减排的步伐。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Smith预估器是得到广泛应用的时滞系统的控制方法。该方法的基本思路是:预先估计出系统在基本扰动下的动态特性,然后由预估器对时滞进行补偿,力图使被延迟了的系统的被调量超前反映到调节器,使调节器提前动作,从而抵消掉时滞特性所造成的影响,减小超调量,提高系统的稳定性,加速调节过程,提高系统的快速性。理论上分析,Smith预估器可以完全消除时滞的影响,从而成为一种对线性、时不变和单输入单输出时滞系统的理想控制方案[2]。
关键词:时滞;过程控制;双控制器;鲁棒稳定性
ABSTRACT
Industrial production process of most of the controlled object have larger pure time-delay properties. The controlled object of this pure time-delay properties often cause overshoot and continuous oscillations. In the 1950 s, Foreign industrial production process to pure lag phenomenon of further research, Smith puts forward a kind of pure lag compensation model, It was not realize this kind of compensation analog meter, cause this method in industrial practice can not be achieved. Along with the rapid development of computer technology, now people can use computer realized pure lag compensation. These systems because energy or material in the medium transmission, that is accused of inertia parameters, can't respond to disturbance quantity or control the quantity change. In the used in some delay large objects,also likely reduced stability of the closed-loop system, dynamic process becomes poor, control quality deterioration of the phenomenon. So, large inertia of pure delay in traditional process control field is recognized as control problem. According to industrial process in the widespread of large delay process, This process will produce more apparent overshoot, the stability of the control system becomes poor,adjust prolonged,this paper describes the double closed loop controller and advanced control strategy. The specific double controller design scheme, The two controller design for the proportion with integral (PI) type,give a specific parameters setting method. The scheme contains two separate controller, That is tracking controller, and disturbance controller,make with the disturbance response to set value response separation,thus, can also gain good set data tracking performance and the anti-interference ability,and the system robustness than existing control scheme greatly increase,is further evidence that the performance of the double controller is superior.
(2)智能控制方法是随着智能控制理论和技术的飞速发展而发展起来的。许多学者将模糊控制和神经网络控制技术应用于大时滞控制系统中。模糊控制的优点是不需要被控对象的精确数学模型,而且具有很强的鲁棒性,因而非常适合于不确定系统。神经网络控制则具有自学习自适应以及很强的非线性表达能力。对于不确定的非线性时变系统非常适用。专家系统为解决复杂的不确定性对象的控制提供了另外一条途径,它以控制专家的经验和知识弥补了对象数学模型的缺陷。智能控制方法虽然克服了Smith预估器和自适应控制的缺陷,但是它们本身也是不完美的。模糊控制的显著缺点是控制精度不高,自适应能力有限,存在稳态误差,可能引起振荡。神经网络的缺点是学习和训练比较费时,对训练集的要求也很高。专家控制则过度依赖专家的经验,缺乏自学习能力,控制精度不高,且同样存在稳态误差。鉴于上述原因,只能控制方法经常相互融合或者和Smith预估器以及自适应控制相结合,这也正是时变大时滞系统控制方法目前的研究方向。现已提出的方法包括:神经元自适应PID控制,自调谐模糊控制器,专家控制与PID控制结合的递阶智能控制器,基于模糊神经网络的预测控制,变结构模糊控制器,基于模糊预测的间歇PID控制,给予模糊逻辑的Smith预估器,基于神经网络的非线性Smith预估器,专家Smith预估器等等。
第2章 基础理论和基本工具的介绍
本次设计中主要涉及到的基础知识包括参数整定、基本控制理论、鲁棒性概述及Simulink仿真。
2.1
所谓的参数整定,就是配合对象特性合理地选择调节器各参数,以得到最佳的控制质量。在工程实际中,常采用工程整定法,它们是在理论基础上通过实践总结出来的。下面简介几种最常用的整定方法。
Keywords:Time delay;Process control;ouble-controller;Robuststability
第1章 迟延系统概述
1.1
迟延系统是指作用在系统上的输入信号或控制信号与其作用系统所产生的输出信号之间存在着时间延迟的一类控制系统。在化工、炼油、冶金、玻璃等一些复杂的工业工程当中,被控对象除了容积迟延外,往往不同程度的存在纯迟延。例如,在热交换器中,被调量是被加热物料的出口温度,被控量是载热物质,当改变载热介质流量后,对物料出口温度的影响必然要延迟一个时间,即介质经管道所需的时间。此外,如反应器、管道混合;皮带传送、轧辊传输、多容量、多个设备串联以及用分析仪表测量流体的成分等过程都存在较大的纯迟延。在这些过程中,由于纯迟延的存在,使得被调量不能及时反映系统所承受的扰动,即使测量信号到达调节器,调节机关接受调节信号后立即动作,也需要经过纯迟延时间τ以后,才波及被调量,使之受到控制[1]。因此,这样的过程必然会产生较明显的超调量,使控制系统的稳定性变差,调节时间延长,对系统的设计和控制增加了很大困难。所以具有纯迟延的过程被公认为是较难控制的过程,其难控程度将随着纯迟延时间τ占整个过程动态的分额的增加而增加。一般认为纯迟延时间τ与过程的时间常数T比大于0.3,则说该过程是具有大迟延的工艺过程。当τ/T增加时,相位滞后增加,使上述现象更为突出,有时会因超调严重而出现聚爆、结焦等停产事故;有时则可能引起系统的不稳定,被调量超过安全限,从而危机设备及人身安全。因此,大迟延系统一直受到人们的关注,成为重要的研究课题之一,对此类问题的研究具有重要的理论和实际意义。
(1)对大多数实际过程而言,被控对象在整个被控过程中不可能保持定常。对于这一系统,采用自适应控制可以获得较好的控制效果。基本思路是:依据自适应控制的“确定性等价原理”和“分离设计原则”,时变系统的控制器设计可以分为两步进行,首先假定被控对象的参数已知且定常,按给定的性能指标设计出相应的控制器,然后利用参数辨识在线估计出被控对象的参数值,并以参数估计值代替控制器中所用的真值对系统进行控制[3]。
自适应控制由于具有对时变参数的良好的适应能力,因而在时变时滞系统中得到了广泛应用。现已提出的方法包括:模型参考自适应控制、自适应预估最优控制、极点配置最优预报自校正PID控制器、大时滞系统的自抗扰控制、时滞并联自适应控制、零极点配置的自校正内模控、动态矩阵控制等等。
自适应控制虽然有良好的控制效果,但是它也存在一定的缺陷,即它要求将对象描述为某些特定的数学模型类,自适应控制器的设计取决于这个数学模型,而实际上许多过程的数学模型难以获得,即所谓灰色系统,使自适应控制的应用受到限制。
毕业设计说明书(论文)
作者:张继超学号:0807240636
学院:自动化工程学院班级:自动086
专业: 自动化□测控技术与仪器
所在系: 控制科学与工程□仪器科学与技术
题目:热工系统纯迟延过程的控制策略年6月吉林
摘 要
工业生产过程中的大多数被控对象都具有较大的纯滞后性质。被控对象的这种纯滞后性质经常引起超调和持续的振荡。在20世纪50年代,国外就对工业生产过程中纯滞后现象进行了深入的研究,史密斯提出了一种纯滞后补偿模型,由于当时模拟仪表不能实现这种补偿,致使这种方法在工业实际中无法实现。随着计算机技术的飞速发展,现在人们可以利用计算机方便地实现纯滞后补偿。这些系统由于能量或物料在介质中的传输,使被控参数惯性大,不能及时反映扰动量或控制量的变化。在应用于某些时滞大的对象时,还可能出现系统闭环稳定性降低、动态过程变差、调节品质恶化的现象。所以,大惯性的纯迟延过程在传统控制领域是公认的控制难题。针对工业过程中广泛存在的大时滞过程,这样的过程必然会产生较明显的超调量,使控制系统的稳定性变差,调节时间延长,本文叙述了双闭环控制器和先进的控制策略。文中具体研究了双控制器设计方案,文中将两个控制器设计为比例加积分(PI)类型,给出了具体的参数整定方法。该方案含两个独立的控制器,即跟踪控制器和扰动控制器,使设定值响应得以与扰动响应分离,从而可同时获得良好的设定值跟踪性能和抗干扰能力,同时系统的鲁棒性也比现有控制方案大为增加,进一步显示了双控制器优越的性能。