雅可比矩阵复习过程
机器人雅可比矩阵知识讲解
x6 f6(q1,q2, ,q6)
注意,如果函数 f1(q) 到 f6(q) 是非线性的,则 f q 是q的 函数,写成 xJ(q)q ,式子两边同除以时间的微分,
上式中,66的偏导数x矩阵J(Jq(q)q)叫做雅可比矩阵。其中
Jijq xiqq j
雅可比矩阵
机器人关节数
*雅可比矩阵的行数取决于机器人的类型
雅可比矩阵在机器人中的应用
可以把雅可比矩阵看作是关节的速度 q 变换到 操作速度V的变换矩阵
在任何特定时刻,q具有某一特定值,J(q)就是一个 线性变换。在每一新的时刻,q已改变,线性变换 也因之改变,所以雅可比矩阵是一个时变的线性变 换矩阵。
在机器人学领域内,通常谈到的雅可比矩阵是 把关节角速度和操作臂末端的直角坐标速度联 系在一起的。
假设矢量yRm为uRn的函数
y= y(u)
y1(u) y2(u)
yy12((uu11,,uu22,, ,,uunn))
ym(u) ym(u1,u2,,un)
对于m=1, (标量对矢量的导数)
u y u y1 1
y1 u2
u y1 n
y相对于u的偏导数定义为
u y u u uyyym 1 2(((u u u))) yu yu u ym 1 1 2 1 1
约束函数C(x),
单位圆上的质点位置约束为 C (x ) xx 1
一般情况下,采用位姿矢量q聚合表达n个粒子的位置。在3D 空间,矢量长度为3n。考虑位置约束C是一个关于位姿矢量q 的未知函数,则速度约束
C C q q
矩阵 C/q 被称作C的雅可比矩阵,记作J。为了进行物理
仿真,求微分 C JqJq,根据力学关系,建立微分约束方
雅可比矩阵推导过程

雅可比矩阵推导过程雅可比矩阵(Jacobian matrix)是微分几何和向量微积分中的一个重要工具,用于描述多元函数的变换关系。
在本文中,我们将详细介绍雅可比矩阵的定义、性质和推导过程。
1. 雅可比矩阵的定义考虑一个从n维欧几里得空间到m维欧几里得空间的映射,即有一个函数F: R^n -> R^m。
假设F的每个分量函数都是连续可微的,那么对于给定的输入向量x ∈R^n,可以将F在该点处进行泰勒展开:F(x + Δx) = F(x) + J(x)Δx + O(‖Δx‖)其中,J(x)是一个m×n的矩阵,称为雅可比矩阵。
它由F的各个分量函数对输入向量x中各个变量求偏导数而组成。
具体地说,如果F = (f₁, f₂, …, fₘ),则雅可比矩阵J(x)按行排列如下:J(x) = [∂f₁/∂x₁∂f₁/∂x₂ ... ∂f₁/∂xₘ][∂f₂/∂x₁∂f₂/∂x₂ ... ∂f₂/∂xₘ][... ... ... ... ][∂fₘ/∂x₁∂fₘ/∂x₂ ... ∂fₘ/∂xₘ]2. 雅可比矩阵的性质雅可比矩阵具有以下几个重要的性质:•雅可比矩阵的行数等于映射的目标空间维度m,列数等于映射的源空间维度n。
•如果F是一个线性映射,那么雅可比矩阵是一个常数矩阵。
•如果F是一个非线性映射,那么雅可比矩阵的每个元素都依赖于输入向量x。
•雅可比矩阵可以用来描述函数在某一点处的局部线性逼近,即泰勒展开式中的一次项。
3. 雅可比矩阵的推导过程为了推导雅可比矩阵,我们将以二维向量值函数为例。
假设有一个函数F: R² ->R²,表示为F(x, y) = (u(x, y), v(x, y))。
我们需要求解F在某一点(x₀, y₀)处的雅可比矩阵。
首先,我们对F的每个分量函数进行偏导数计算。
对于u(x, y),其偏导数为:∂u/∂x = lim(Δx→0) [u(x + Δx, y) - u(x, y)] / Δx同理,对于v(x, y),其偏导数为:∂v/∂x = lim(Δx→0) [v(x + Δx, y) - v(x, y)] / Δx类似地,我们可以计算出u和v关于y的偏导数:∂u/∂y = lim(Δy→0) [u(x, y + Δy) - u(x, y)] / Δy∂v/∂y = lim(Δy→0) [v(x, y + Δy) - v(x, y)] / Δy将上述四个偏导数整理成矩阵形式,即得到雅可比矩阵J:J = [∂u/∂x ∂u/∂y][∂v/∂x ∂v/∂y]这就是二维向量值函数F在点(x₀, y₀)处的雅可比矩阵。
坐标变换的雅可比矩阵怎么求

坐标变换的雅可比矩阵求解方法在计算机图形学和机器人学等领域,我们经常需要进行坐标变换,并且在进行这些变换时,雅可比矩阵是一个非常重要的工具。
雅可比矩阵可以帮助我们分析如何改变一个坐标系中的点,使其在另一个坐标系中的表示发生变化。
本文将介绍如何求解坐标变换的雅可比矩阵。
1. 坐标变换的基本概念在二维空间中,我们通常可以用一个2x2的矩阵表示坐标变换。
假设我们有一个点P(x, y),通过矩阵M可以将其变换为P’(x’, y’),则变换过程可以表示为:P' = M * P在三维空间中同理,我们可以用一个3x3的矩阵表示坐标变换。
2. 雅可比矩阵的定义雅可比矩阵是一个矩阵,由一个函数的偏导数构成。
在计算机图形学中,雅可比矩阵描述了变换函数对于坐标变换的影响。
对于一个变换函数f(x, y),其雅可比矩阵J如下:J = | ∂f_1/∂x ∂f_1/∂y || ∂f_2/∂x ∂f_2/∂y |3. 求解坐标变换的雅可比矩阵要求解坐标变换的雅可比矩阵,我们需要先确定要进行的坐标变换函数。
假设我们有一个从二维坐标系到二维坐标系的变换,变换函数为f(x, y),我们需要求解其雅可比矩阵。
1.首先,我们需要计算函数f对于x和y的偏导数,即∂f/∂x和∂f/∂y。
2.然后,将这些偏导数组合成雅可比矩阵J。
下面举一个例子来说明如何求解坐标变换的雅可比矩阵。
假设我们有一个坐标变换函数f(x, y) = (x + y, x - y),我们需要求解其雅可比矩阵J。
示例:1.计算∂f/∂x和∂f/∂y:∂f/∂x = (1, 1)∂f/∂y = (1, -1)2.形成雅可比矩阵J:J = | 1 1 || 1 -1 |因此,函数f(x, y) = (x + y, x - y)的雅可比矩阵为J = [1 1; 1 -1]。
4. 结论通过以上步骤,我们可以求解坐标变换的雅可比矩阵。
雅可比矩阵在坐标变换中具有重要作用,它帮助我们理解变换函数对坐标变换的影响,进而优化计算过程。
二重积分的换元法中雅可比矩阵
二重积分的换元法中雅可比矩阵好啦,今天我们来聊聊二重积分的换元法,嗯,重点是雅可比矩阵,虽然听起来有点复杂,但其实它不算啥大难题,咱们慢慢捋捋,肯定能明白的!你别害怕“雅可比”这词,听着是不是有点高大上?其实它也就像你身边的一个好朋友,帮你在积分的时候变魔术,换个方式,问题就解决了。
你想啊,做二重积分不就是一个在平面上计算面积或者体积的过程嘛。
通常,咱们都是直接按着给定的坐标系来计算,简单明了。
但有些时候,坐标系就像是条死胡同,走着走着就卡住了。
所以,聪明的你就得想到,换个坐标系走走看,说不定能轻松找到出口!这时候,“换元法”就上场了。
你可以通过换个坐标系,让计算变得简单。
比如从笛卡尔坐标系换到极坐标系,或者说从一套坐标系换到另一套坐标系。
你看,生活中也有这种情况,大家明明都在同一个城市,却因为不同的路线图,走起来就完全不一样。
换个路线,可能几分钟就到达目标了。
二重积分也是一样的道理,换个合适的坐标系,复杂的计算就变得简单起来。
可是问题来了,换坐标系的过程中,不是光嘴巴说说就能搞定的。
你得保证,原来每一点的“面积”或者“体积”在新坐标系下能准确反映出来。
说白了,就是你换了路,要确保每一段路都走得不偏不倚,不能让面积或者体积出现“缩水”或“膨胀”这种情况。
怎么办呢?就得借助雅可比矩阵了。
这个雅可比矩阵,听着很唬人,但其实就是个工具,帮你搞清楚换坐标的“缩放比例”。
这个“缩放比例”就叫做“雅可比行列式”,它能告诉你原来那个小面积在新坐标下变成了多少。
举个例子,假设你原本在笛卡尔坐标系下有一个矩形区域,要计算这个区域的面积。
然后,你突然决定换到极坐标系,这时候,雅可比矩阵的作用就来了。
它帮助你转换,告诉你“哎,这个小矩形在极坐标下变得怎么样了,是不是更宽了,还是更窄了?”它能帮你调整,确保换元后,面积计算不出错。
再细说点,这个雅可比矩阵其实就是通过一个简单的公式算出来的:你先对原坐标系里的每个坐标做偏导数,再按照一定的规则排成矩阵。
雅克比矩阵(Jacobi).
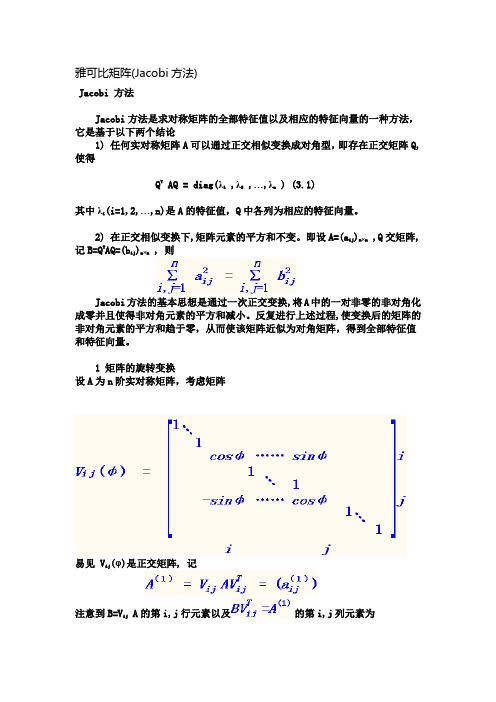
雅可比矩阵(Jacobi方法)Jacobi 方法Jacobi方法是求对称矩阵的全部特征值以及相应的特征向量的一种方法,它是基于以下两个结论1) 任何实对称矩阵A可以通过正交相似变换成对角型,即存在正交矩阵Q,使得Q T AQ = diag(λ1 ,λ2,…,λn) (3.1)其中λi(i=1,2,…,n)是A的特征值,Q中各列为相应的特征向量。
2) 在正交相似变换下,矩阵元素的平方和不变。
即设A=(aij )n×n,Q交矩阵,记B=Q T AQ=(bij )n×n, 则Jacobi方法的基本思想是通过一次正交变换,将A中的一对非零的非对角化成零并且使得非对角元素的平方和减小。
反复进行上述过程,使变换后的矩阵的非对角元素的平方和趋于零,从而使该矩阵近似为对角矩阵,得到全部特征值和特征向量。
1 矩阵的旋转变换设A为n阶实对称矩阵,考虑矩阵易见 Vij(φ)是正交矩阵, 记注意到B=VijA的第i,j行元素以及的第i,j列元素为可得≠0,取φ使得则有如果aij对A(1)重复上述的过程,可得A(2) ,这样继续下去, 得到一个矩阵序列{A(k) }。
可以证明,虽然这种变换不一定能使矩阵中非对角元素零元素的个数单调增加,但可以保证非对角元素的平方和递减,我们以A与A(1)为例进行讨论。
设由式(3.4)可得这表明,在上述旋转变换下,非对角元素的平方和严格单调递减,因而由(3.2)可知,对角元素的平方和单调增加。
2. Jacobi方法通过一系列旋转变换将A变成A(k+1) ,求得A的全部特征值与特征向量的方法称为Jacobi方法。
计算过程如下1)令k=0, A(k) =A2) 求整数i,j, 使得3) 计算旋转矩阵4) 计算A(k+1)5) 计算6) 若E(A(k+1))<ε, 则为特征值,Q T = (V(0) V(1)…V(k+1))T的各列为相应的特征向量;否则,k+1=>k返回2,重复上述过程。
雅可比算法求矩阵的特征值和特征向量

雅可⽐算法求矩阵的特征值和特征向量⽬的求⼀个实对称矩阵的所有特征值和特征向量。
前置知识对于⼀个实对称矩阵A ,必存在对⾓阵D 和正交阵U 满⾜D =U T AUD 的对⾓线元素为A 的特征值,U 的列向量为A 的特征向量。
定义n 阶旋转矩阵G (p ,q ,θ)=1⋯0 ⋱ 1 cos θ−sin θ 10 ⋱ 0即在单位矩阵的基础上,修改a pp =a qq =cos θ,a qp =−a pq =sin θ对于n 阶向量α,α⋅G (p ,q ,θ)的⼏何意义是把α在与第p 维坐标轴和第q 维坐标轴平⾏的平⾯内旋转⾓度θ,并且旋转后的模长保持不变。
算法原理⼤概思路使通过旋转变换使⾮对⾓线上的元素不断变⼩,最后得到与原矩阵相似的对⾓矩阵。
每次找到矩阵A 绝对值最⼤的的⾮对⾓线元素,设为a pq ,令U =G (p ,q ,θ),将A 变换为U T AU变换后的值为通过令b p ,q =0解得θ=12arctan 2a pq a qq−a pp 特别地当a qq =a pp 时θ=π4注意到旋转操作并不会改变每个⾏向量或列向量的模长,即矩阵A 的F-范数||A ||F =∑i ∑j a 2ij 是不变的,并且通过计算可以得出$$b_{ip}2+b_{iq}2=a_{ip}2+a_{iq}2$$从⽽可以得知⾮对⾓线元素的平⽅和变⼩,对⾓线上元素的平⽅和增⼤,故⾮主对⾓线上元素的平⽅和收敛。
算法流程(1)令矩阵T =E ,即初始化单位矩阵(2)找到A 中绝对值最⼤的⾮对⾓选元素a pq(3)找到对应的⾓度θ,构造矩阵U =G (p ,q ,θ)(4)令A =U T AU ,T =TU(5)不停地重复(2)到(4),直到a pq <ϵ或迭代次数超过某个限定值,则A 的对⾓线元素近似等于A 的特征值,T 的列向量为A 的特征向量代码#include<bits/stdc++.h>using namespace std;const int N=1005;const double eps=1e-5;const int lim=100;int n,id[N];[√double key[N],mat[N][N],EigVal[N],EigVec[N][N],tmpEigVec[N][N];bool cmpEigVal(int x,int y){return key[x]>key[y];}void Find_Eigen(int n,double (*a)[N],double *EigVal,double (*EigVec)[N]){for (int i=1;i<=n;i++)for (int j=1;j<=n;j++)EigVec[i][j]=0;for (int i=1;i<=n;i++) EigVec[i][i]=1.0;int count=0;while (1){//统计迭代次数count++;//找绝对值最⼤的元素double mx_val=0;int row_id,col_id;for (int i=1;i<n;i++)for (int j=i+1;j<=n;j++)if (fabs(a[i][j])>mx_val) mx_val=fabs(a[i][j]),row_id=i,col_id=j;if (mx_val<eps||count>lim) break;//进⾏旋转变换int p=row_id,q=col_id;double Apq=a[p][q],App=a[p][p],Aqq=a[q][q];double theta=0.5*atan2(-2.0*Apq,Aqq-App);double sint=sin(theta),cost=cos(theta);double sin2t=sin(2.0*theta),cos2t=cos(2.0*theta);a[p][p]=App*cost*cost+Aqq*sint*sint+2.0*Apq*cost*sint;a[q][q]=App*sint*sint+Aqq*cost*cost-2.0*Apq*cost*sint;a[p][q]=a[q][p]=0.5*(Aqq-App)*sin2t+Apq*cos2t;for (int i=1;i<=n;i++)if (i!=p&&i!=q){double u=a[p][i],v=a[q][i];a[p][i]=u*cost+v*sint;a[q][i]=v*cost-u*sint;u=a[i][p],v=a[i][q];a[i][p]=u*cost+v*sint;a[i][q]=v*cost-u*sint;}//计算特征向量for (int i=1;i<=n;i++){double u=EigVec[i][p],v=EigVec[i][q];EigVec[i][p]=u*cost+v*sint;EigVec[i][q]=v*cost-u*sint;}}//对特征值排序for (int i=1;i<=n;i++) id[i]=i,key[i]=a[i][i];std::sort(id+1,id+n+1,cmpEigVal);for (int i=1;i<=n;i++){EigVal[i]=a[id[i]][id[i]];for (int j=1;j<=n;j++)tmpEigVec[j][i]=EigVec[j][id[i]];}for (int i=1;i<=n;i++)for (int j=1;j<=n;j++)EigVec[i][j]=tmpEigVec[i][j];//特征向量为列向量}int main(){scanf("%d",&n);for (int i=1;i<=n;i++)for (int j=1;j<=n;j++)scanf("%lf",&mat[i][j]);Find_Eigen(n,mat,EigVal,EigVec);printf("EigenValues = ");for (int i=1;i<=n;i++) printf("%lf ",EigVal[i]);printf("\nEigenVector =\n");for (int i=1;i<=n;i++)for (int j=1;j<=n;j++)printf("%lf%c",EigVec[i][j],j==n?'\n':' ');return 0;}Processing math: 100%。
02-课件:4.2 雅克比矩阵构建(矢量积法)
动学方程中的关节变量进行微分计算而得到的雅可比矩阵。
•
•
x q e J (q)
J --雅可比矩阵
机器人末端运动的描述(位姿、速度)
在操作空间中描述机器人末端的位姿,在关节空间中描述 关 节的角度:
对于转动关节
对于移动关节
机器人末端运动的描述(位姿、速度)
末端位姿的描述方法:
方向余弦
欧拉角
RPY角
3
3Z 3
2 3
R
1
2 2
3
3Z 3
2 3
R
T
2 2
3
3Z 3
c3 s3
0
s3 c3 0
0
0 2 2
•
3
3Z 3
c3 s 3
1
0
s3 c3 0
0 0
0
0
0
1
•
1
0
•
2
•
3
0 1
•1
0
•
2
•
3
3v3
3 2
R
2v2 2 2
2 3
R
1
2v2 2 2
3
3v
l1s2 l1c2
l2
•
0
l2
1
•
2
c12 s12 0
0 3
R
s
12
c12
0
0 0 1
3J
l1s2 l1c2
l2
0
l 2
通过速度传递关系计算雅可比矩阵(续9/9)
0
J
c12
s 12
s12 l1s2
c12
l1c2
l2
雅克比矩阵(Jacobi).
雅可比矩阵(Jacobi方法)Jacobi 方法Jacobi方法是求对称矩阵的全部特征值以及相应的特征向量的一种方法,它是基于以下两个结论1) 任何实对称矩阵A可以通过正交相似变换成对角型,即存在正交矩阵Q,使得Q T AQ = diag(λ1 ,λ2,…,λn) (3.1)其中λi(i=1,2,…,n)是A的特征值,Q中各列为相应的特征向量。
2) 在正交相似变换下,矩阵元素的平方和不变。
即设A=(aij )n×n,Q交矩阵,记B=Q T AQ=(bij )n×n, 则Jacobi方法的基本思想是通过一次正交变换,将A中的一对非零的非对角化成零并且使得非对角元素的平方和减小。
反复进行上述过程,使变换后的矩阵的非对角元素的平方和趋于零,从而使该矩阵近似为对角矩阵,得到全部特征值和特征向量。
1 矩阵的旋转变换设A为n阶实对称矩阵,考虑矩阵易见 Vij(φ)是正交矩阵, 记注意到B=VijA的第i,j行元素以及的第i,j列元素为可得≠0,取φ使得则有如果aij对A(1)重复上述的过程,可得A(2) ,这样继续下去, 得到一个矩阵序列{A(k) }。
可以证明,虽然这种变换不一定能使矩阵中非对角元素零元素的个数单调增加,但可以保证非对角元素的平方和递减,我们以A与A(1)为例进行讨论。
设由式(3.4)可得这表明,在上述旋转变换下,非对角元素的平方和严格单调递减,因而由(3.2)可知,对角元素的平方和单调增加。
2. Jacobi方法通过一系列旋转变换将A变成A(k+1) ,求得A的全部特征值与特征向量的方法称为Jacobi方法。
计算过程如下1)令k=0, A(k) =A2) 求整数i,j, 使得3) 计算旋转矩阵4) 计算A(k+1)5) 计算6) 若E(A(k+1))<ε, 则为特征值,Q T = (V(0) V(1)…V(k+1))T的各列为相应的特征向量;否则,k+1=>k返回2,重复上述过程。
3.4机器人运动学雅可比矩阵
r f ( )
一般情况:
r f ( )
T m1 n1
r r1 , r2 , , rm R
1 , 2 , , n R
rj f j (1,2 ,,n )
j 1,2,, m
若n>m,手爪位置的关节变量有无限 个解,通常工业用机器人有3个位置变量 和3个姿态变量,共6个自由度(变量)。
f1 n m n R f m n
2、与平移速度有关的雅可比矩阵
相对于指尖坐标系的平移速度,是通过把坐标 原点固定在指尖上,指尖坐标系相对于基准坐 标系的平移速度来描述
O0 x0 y0 z0 Oe xe ye ze
:基准坐标系
:指尖坐标系
机器人雅可比矩阵机器人运动学机器人逆运动学雅可比矩阵matlab雅可比矩阵机器人正逆运动学雅克比矩阵机器人雅可比迭代矩阵家可比矩阵安堂机器人
3.4
机器人的雅可比矩阵
微分运动与速度
1、
微分运动指机构的微小运动,可用来推导不 同部件之间的速度关系。 机器人每个关节坐标系的微分运动,导致机 器人手部坐标系的微分运动,包括微分平移与微 分旋转运动。将讨论指尖运动速度与各关节运动 速度的关系。 前面介绍过机器人运动学正问题
J J1 J2
nm6
r f ( )
对位置方程进行求微分得:
dr J d r J dt dt
两边乘以dt,可得到微小位移之间的关系式
dr Jd
J 表示了手爪的速度与关节速度之间关系, 称之为雅克比矩阵。
f1 1 f J T f m 1
ze
z0
P e
Oe
xe
坐标变换雅可比行列式推导
坐标变换雅可比行列式推导在数学和物理领域中,坐标变换雅可比行列式是一种重要的工具,通常用于描述物体在不同坐标系下的变换关系。
在本文中,我们将详细推导坐标变换雅可比行列式的计算方法,以帮助读者更好地理解这一概念。
一、坐标变换的基本概念在二维空间中,我们通常用一个二维向量(x,y)来表示一个点的坐标。
当我们需要将这个点从一个坐标系变换到另一个坐标系时,我们通常会利用线性变换矩阵来进行计算。
假设我们有一个线性变换矩阵A,它可以将原始坐标系下的向量(x,y)变换为新坐标系下的向量(x′,y′),即:$$\\begin{pmatrix}x'\\\\y' \\end{pmatrix} = A\\begin{pmatrix}x\\\\y\\end{pmatrix}$$二、雅可比行列式的定义雅可比行列式是一个矩阵对应的行列式的绝对值。
在坐标变换中,雅可比行列式表示了坐标系变换对坐标点间距离比例的影响。
假设我们有一个二维坐标变换的雅可比矩阵为J,则雅可比行列式det(J)的计算方法为:$$det(J) = \\left|\\det \\begin{pmatrix} \\frac{\\partial x'}{\\partial x} &\\frac{\\partial x'}{\\partial y} \\\\ \\frac{\\partial y'}{\\partial x} &\\frac{\\partial y'}{\\partial y} \\end{pmatrix}\\right|$$其中,$\\frac{\\partial x'}{\\partial x}$表示x′关于x的偏导数,$\\frac{\\partial x'}{\\partial y}$表示x′关于y的偏导数。
三、雅可比行列式推导过程我们以二维空间中的坐标变换为例,推导雅可比行列式的计算方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雅可比矩阵
5.1.1 雅克比矩阵及其行列式的几何意义
因为雅克比矩阵如此重要且有趣,我们把它单列一节讨论,并放在矩阵的
行列式的几何意义后面。
说实在的,解说雅克比矩阵及其行列式的几何意义,是应一位网友的希望而作。
先前的五章在网上发布以后引起了不少哥们的关注,大多是共鸣及鼓励的话。
一位网友哥们说(大意是),你除了内容有些凌乱外细节写得还不错,是下了一番功夫……,不知以后写不写雅克比行列式的几何意义等等。
嘿嘿,您的给力评论使俺很受鼓舞。
就像在学校里,老师先表扬说你的作业写得不错,有进步,我再给你出个优等生的题目吧。
因此,俺就把这事记下了,先把题目列在目录里防止忘了。
当写到这一节时才知道这个题目确实有点难度啊,又下了很大的功夫,才觉得这件事通顺了。
至此俺才发现,老师出的这个题目太有目光了,雅克比矩阵简直就是线性代数和微积分的纽带,是把非线性问题转换为线性问题的有力工具之一啊。
有时看到一点微分几何的内容,也觉得和微分几何颇有渊源(宽恕俺没学过微分几何)。
兹写作业在此,希望再次得到老师的表扬哦:
5.1.1雅克比矩阵及其行列式的几何意义
话说有一个函数方程组,是由n个函数组成,每个函数也有n个自变量:。
这个函数组有两个意义可以解释,一个解释它是一个映射,点被映射成;另外的一个解释就是坐标变换的意思,如果你把这个函数组代到一个以为自变量的某方程中,即相当于把某方程的原坐标系被替换成坐标系。
这两个解释本质是一回事,是同一件事情的从不同角度的看法。
坐标系不动,一个点被变换到另一个点;这等价于说点不动,一个坐标系被代换到另一个坐标系。
下面我们将从其坐标变换的解释角度来分析。
一般情况下,这个函数方程组不是线性方程组,它的图形多是高维曲线、曲面类的。
稍详细一点说,每一个函数是个超维曲面,n个超维曲面组合在一起交割成超维曲线。
不过猛地看起来蛮像线性方程组的样子,心里于是就有了把它弄成线性方程组的冲动:弄成线性的可以使用矩阵、行列式啊什么的,可以和线性变换联系起来,多有几何意义啊。
咋弄成线性的?直接改写成矩阵形式吗,恐怕不行。
嘿,不是有微积分嘛,微分就是把曲的弄成直的,积分就是把直的弄成弯的。
好,对多元的非线性可微方程组进行偏微分:。
到了这一步是不是和线性方程组有点相似了?!这个过程就是激动人心之化曲为直的过程。
几何意义上化每个超曲面为超平面(函数是超维切平面方程,因此实际上就是化为超维切平面),n个超平面组合在一起就是超维切线方程,因此就这样化曲线为直线了。
代数意义上就把高次函数方程组化成了齐次线性方程组。
好,那就把它写成矩阵的形式吧:。
(5?18)
当里个当,主角雅克比矩阵出现了,就是上式(5?18)向量方程中间的大方块。
当然雅克比行列式就是雅克比矩阵的行列式。
毋庸置疑,雅克比矩阵和行列式具有前面讲过的矩阵和行列式的所有意义。
除此之外还有两点特殊的地方:
一是向量的元素如,等是微分,它们是一些极小量,而且是极小的向量;是在坐标轴上的微分向量,是在坐标轴上的微分向量。
二是雅克比矩阵里面的元素如,等一般不是常数,而是变量,这和前面讲的矩阵不同。
恰恰是这两点,并结合矩阵的坐标系变换的意义,我们终于揭开了雅克比矩阵和行列式的最终几何意义:
雅克比矩阵把一个超平面的仿射坐标系变换成了一个超曲面坐标系;雅克比行列式就是曲面坐标系下单位微元和仿射坐标系下单位微元面积的比值。
不太明白,再换一种说法:
雅克比矩阵把一个空间里的一个平面坐标系(基)变换成了无数个极小平面坐标系(基);无数个极小平面就是曲面的切平面;雅克比行列式就是切平面上每个坐标系下极小单位元和原坐标系下极小单位元面积的比值。
泛泛而谈让人昏昏入睡,我们找个2维的具体例子看看吧。