相角裕度幅值裕度
王划一-自动控制原理-5-3稳定裕度
= 37.4
当(g) = 180时
180 = arctang 180 2arctan0.1g
求得
arctang =2arctan0.1g g = 8.94
20 lg h
20 lg A(g )
20
lg
k g g2 12
9.03dB
因为 > 0,所以闭环系统是稳定旳。
0
0 20 40 60 80
能够看出,调整时间与相角裕度和幅值穿越频率都有 关系。假如两个二阶系统旳相同,则它们旳超调量也相同, 这时比较大旳系统,调整时间较短。
17
例5-19 一单位反馈控制系统,其开环传递函数
G(s)
7
s(0.087s 1)
试用相角裕度估算过渡过程指标p% 与ts。
解:系统开环伯德图如图示
33
四 、奈奎斯特稳定判据
内容 应用
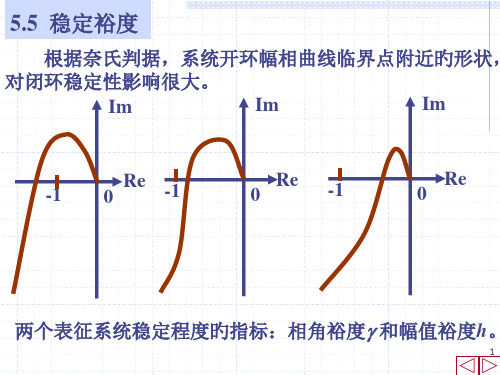
5.5 稳定裕度
根据奈氏判据,系统开环幅相曲线临界点附近旳形状,
对闭环稳定性影响很大。
Im
Im
Im
-1
Re 0
-1
Re 0
-1
Re 0
两个表征系统稳定程度旳指标:相角裕度 和幅值裕度h。
1
(1)幅值裕度h :令相角为180时相应旳频率为g (相角穿越频率),频率为g 时相应旳幅值A(g)旳倒数,
定义为幅值裕度h ,即 h 1 A(g )
10 11.5
0
1
20
40dB/dec
()/()
0
90
180
19
2) 高阶系统
近似旳关系式
p
0.16 0.4( 1
16 第十六讲 伯德图分析-稳定性-及幅值和相角裕度

作业: P339 P339 16.1 a. 16.3 e.
当 k > k1时, 系统是稳定的
Im
ω =0
-1
ω=∞
Re
图.16.14
稳定系统的奈奎斯特图
例题 16.1
问题: 如图所示的系统, 画出当K=45时 的伯德图, 并确定增益裕度和相位裕度。 计算使系统稳定的最大K值, 并用劳斯阵 列验证其结果。
R +
⊕
-
C
K
1 ( s + 2)( s + 3)3
Mdb
log10 ω
GM
0db
φ
−1800
PM
log10 ω
图.16.3 增益裕度和相位裕度
系统的型和从伯德图得到 稳态误差
一般开环传递函数
Kb (1+ s / z1 )(1+ s / z2 )L(1+ s / zm ) GH(s) = n s (1+ s / p1 )(1+ s / p2 )L(1+ s / pk )
GM 1 = K1db GM 2 = K 2 db
图.16.11 系统的根轨迹图
单一频率穿越点: 增加相位 考虑下面的例子
(1+ s / 2) GH(s) =
s3
2
相位裕度是负的,表明系统是不稳定的。 增益裕度是正的,表明系统是稳定的。 考虑相位裕度,系统是稳定的。
0.1 40
1
10
100
ω
M db
伯德图中的相位裕度: - 相位裕度是使相角曲线向下移动 直到 增益和相角穿越点发生在同一频率时 的纯相角滞后量 。 - 在图16.1中
PM = 54
幅值裕度和相角裕度计算

幅值裕度和相角裕度计算幅值裕度和相角裕度计算,这可真是个有趣又烧脑的事儿啊。
我在实验室里研究控制系统的时候,就老得琢磨这俩玩意儿。
周围那些仪器啊,闪着小灯,嗡嗡响着,就像一群小虫子在叫。
我的搭档,是个眼睛小小的家伙,戴着个黑框眼镜,那镜片厚得像酒瓶底儿。
他拿着计算草稿,眉头皱得像麻花,嘟囔着:“这幅值裕度和相角裕度可真不好算呐。
”咱先说这幅值裕度计算。
这就像在走迷宫,得找到那个关键的出口。
你得先把开环传递函数搞清楚,那函数就像一团乱麻,得一点点梳理。
这函数里的参数啊,有的像调皮的小鬼,稍不注意就把你带偏了。
我们在计算的时候,拿着计算器按个不停,那计算器的按键声,哒哒哒的,就像小马蹄在跑。
有次我算着算着,算错了一个数,结果那数值差得离谱,我气得直拍脑袋,像个傻瓜一样。
相角裕度计算也不简单。
它和幅值裕度就像一对难兄难弟。
得先找到截止频率,这就像在大海里找一颗珍珠一样。
要画出伯德图,那伯德图的线啊,弯弯绕绕的,就像山路一样。
我拿着尺子在纸上比划着,想把线画准,眼睛都看花了。
我问搭档:“你看这线对不?” 他凑过来,眼睛瞪得老大,看了半天说:“好像不太对,再量量。
”这幅值裕度和相角裕度计算啊,得细心又细心。
要是算错了,那控制系统可就出大问题了,就像火车跑错了轨道一样。
不过呢,当你好不容易算对了,那种感觉就像打了胜仗一样,心里美美的。
而且这俩概念在实际中用处可大了,就像给控制系统上了保险,让它稳稳当当的,不会出乱子。
咱搞这行的,就得把这些计算吃透,就像老虎咬住猎物不松口一样,这样才能把控制系统设计得更好,让那些机器啊、设备啊都乖乖听话。
相角裕度幅值裕度知识讲解

h2l0g
20
2l0g 20
x 1x2 10.0•1x2
x 0x2
2l0g3.212 066.0d2B
P198
5-13
已知系统的开环传递函数 G(s 试计算K=4、10的稳定裕度。
A (c)G (jc)H (jc)1
n2
1
c c2 2n2
10 8 G 0 jc H jc
1800 900 arctan c 2n
=arctan2n c
cn 14422
arctan 2 144 22
P200 例5-14(图解法、近似计算法、精确计算法)
已知系统的开环传递函数,试计算 G(s)
为了使最小相位系统稳定,相角裕度必须为正。 在对数坐标图上的临界稳定点为0dB和-1800
幅值裕度又称增益裕度(Gain Margin)
相角为-180°点所对应的频率为穿越频率
(x ) G jx H jx 10 80
定义幅值裕度为
h
1
GjxHjx
幅值裕度h的物理意义:
对于闭环稳定系统,如果系统开环幅频特性再增大h
4
h 1 2l0 g G (j x) 2l0 g 3 6 (d)B (31 )2
G (j)j K 1 3(2 K 1 )2 3ex j( 3 p t g 1 )
K=10时:
10
( c21)2 3 1,
c1
1
03011.9
1
2 1 0 8 c 0 1 0 3 8 t 1 1 g . 9 0 7 1 0
=0+
G(j)j(jT 1K 1)(jT 21)
第六章-5-相角裕度和幅值裕度以及闭环频率特性指标
1/h < 1,
h>1
LmG(jω) ωΦ 幅值裕度, Lm (+) ) h(
Lmh Lm G ( j x ) 0
1/h -1 ωx
-90°
Φ γ(+) ω ωΦ G(jω)
-135 135° -180° -225 225° -270°
ωx 相位裕度, γ(+)
ω→
G(jω)的极坐标图 G(jω)的对数幅频曲线和相频曲线 9
1 h 1.25 0.8
1
1 h
Im j
GH
1 Re
x
0
A
j
0
例6-20 的极坐标图
浙江大学控制科学与工程学系
15
Phase Margin and Gain Margin
相角裕度和幅值裕度的求解方法——Bode图法 Bode图法
(三)Bode图法 画出系统的Bode图,由开环对数幅频特性与零分贝线(即 轴)的交 点频率 ,求出对应的相频特性与- 求出对应的相频特性与 1800线的相移量,即为相角裕度 线的相移量 为相角裕度
G(jω)
ω
-225° -270°
G(jω)的极坐标图
G(jω)的对数幅频曲线和相频曲线 6 浙江大学控制科学与工程学系
Phase Margin and Gain Margin
相角裕度和幅值裕度以及与稳定性的关系
对于闭环稳定系统,如果系统的开环相频特性再滞后 相角裕度γ 度,则系统将处于临界稳定状态. 滞后该角度将使得极坐标图穿越–1 1点 对于最小相位系统来说,相角裕度为正,系统稳定,负的相角裕 度表示系统是不稳定的. 相角裕度与系统阻尼比 有关,一般来讲,相角裕度在 有关 一般来讲 相角裕度在45°到 到 60°之间的系统响应是能令人满意的。
一、幅值裕度

为了获得满意的过渡过程,通常要求系统有 45°-70°的相角裕度。这可以通 过减小开环增益K的办法来达到。
但是,减小K一般会使斜坡输入时稳态误差变大。因此有必要应用校正技术,使 系统兼顾稳态误差和过渡过程的要求。
L 对数幅值稳定裕度或对数增益稳定裕度。 g
二、相角裕度
定义 : 在幅相曲线上,相角180 加开环幅相曲线幅值等于1时的
相角, 称为控制系统的相角裕度。
即
=1 8 0 + (c)
式中c-截止频率或剪切频率。在c处,A(c)=1。
物理意义 : 如果系统在频率c处的相角迟后再增大度,则系统
将处于临界稳定状态。
求ωc 和相角裕度γ的另一种方法
由已知的开环传递函数得
A()
K
1 2 1 ( )2
5
按定义由 A (ω)=1就可以求出ωc来,但系统阶数高时,由A (ω)=1求 ωc是很麻烦的。可以采用近似处理的办法求ωc 。
由图可知因1<ωc<5,故可取1 2 ,(认为 2 1)
c
c
c
1
( )2 1 [认为( )2。则 1]
§5-5 控制系统的相对稳定性
一、幅值裕度
定义 : 在幅相曲线上,相角等于-180 时对应幅值的倒数, 称为
控制系统的幅值裕度。
1
即
h
A( g )
式中 g-相角交接频率。在 g 处, ( g)
180。
物理意义 : 稳定系统在相角交界频率 g 处, 若幅值增大h倍,系统
将处于临界稳定状态。
令
L g 20 log h(dB)
由曲线2和3可知,K =2时,相角裕度和幅值裕度分别是
24 , L 20 log h 10(dB)
伯德图分析-稳定性-及幅值和相角裕度
0.01
0.1
1.0
10
增益穿 越点
相位穿
图16.1 例子系统的伯德图
越点
增加K 将使幅值曲线向上平移动,从 而使幅值穿越点向右移。但是相角穿越点 保持不变。 系统最终处在临界不稳定点上。
▽ 计算临界不稳定时系统的幅值。
20 lg NK 20 lg K 20 lg N
20 lg NK KdB NdB
渐近线的延长线求出。
M db
20 log10 Kv
-
20d
b/d
log10
eca1
图.16.6 1 型系统的另一种伯德图
2型系统
GHs
Kb s2
GH
j
Ka
j 2
如果 ka=1。对数幅频特性在当ω =1时,其低频段或它的延长线会以– 40db/decade 的斜率穿过 零分贝线 。
Ka 的值可以通过测量ω = 1 处的 增益值来获得。
PM 54
▽ 在伯德图中获得增益裕度和相位裕 度:
增益裕度是通过相角穿越频率得出的。 它是该频率处的幅值分贝值与0dB线之间
的差值(用分贝表示) 。 相角裕度是通过增益穿越频率得出的, 它是此频率处的相角与-180o线之间的差值。
M db
0 d b
1800
log10
G M
P
log10
M
图.16.3 增益裕度和相位裕度
线性控制系统工程
第16章
伯德图分析,稳 定性,
及幅值和相角 裕度
第16章 伯德图分析,稳定性 及幅值和相角裕度
伯德图中的增益裕度和相角裕度
g c
(g c)
(g c)
GM Kc
简述幅值裕度的概念
简述幅值裕度的概念幅值裕度是一个工程学术语,它是指在幅值的基础上再留有一定余地的程度,即允许存在的最大偏差。
这个概念常用于数学、物理等学科以及电流、电磁、机械等领域。
幅值就是幅度,指的是偏离平衡位置的最大距离。
例如,在一个周期内,交流电出现的最大绝对值,称为交流电的幅值,也叫最大值、振幅、峰值。
幅值裕度表示了系统在幅值方面的稳定储备量。
它与系统的稳定性密切相关。
在开环系统中,如果幅值裕度h大于2(h(dB)大于0),则系统是稳定的;如果h小于2(h(dB)小于0),则系统是不稳定的。
在相角裕度方面,一般要求相角裕度γ大于40°(γ大于0),表示奈奎斯特曲线未包围(-1,j0)点,系统是稳定的;如果γ小于0,表示奈奎斯特曲线包围了(-1,j0)点,系统是不稳定的;如果γ等于0,表示奈奎斯特曲线通过了(-1,j0)点,系统是临界稳定的。
在设计控制系统时,为了使系统具有足够的稳定裕度和获得良好的动态性能,一般要求相角裕度γ=30~70度,幅值裕度h=2~2.5或h(dB)=6~8。
在电路设计中,幅值裕度也是一个重要的概念,它可以用来描述信号的稳定性和可靠性。
幅值裕度越大,信号的稳定性和可靠性就越高。
幅值裕度在工程领域中具有重要的应用价值。
首先,它代表了系统在面对外部扰动时的稳定性。
当系统受到外部干扰时,幅值裕度可以保证系统不会立即失去稳定性,而是会在一定范围内波动。
其次,幅值裕度可以用来衡量系统的鲁棒性。
具有较大幅值裕度的系统,通常更加稳定。
1.在控制系统设计中,幅值裕度是一个关键的性能指标。
它表示了系统在幅值方面的稳定储备量,是评估系统稳定性的重要依据。
为了使系统具有足够的稳定裕度和获得良好的动态性能,一般要求相角裕度γ=30~70度,幅值裕度h=2~2.5或h(dB)=6~8。
2.在电路设计中,幅值裕度也是一个重要的概念,它可以用来描述信号的稳定性和可靠性。
幅值裕度越大,信号的稳定性和可靠性就越高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统正常工作的首要条件是系统稳定,同时 还必须满足一定的相对稳定性要求,相对稳定性反映 出系统稳定程度的好坏。闭环控制系统相对稳定性 (时域中,超调量 % ,根与虚轴距离)可以通过 开环频率特性加以描述。奈氏(幅相)曲线与临界点 (-1,j0)的靠近程度,可以用来度量稳定裕度, 在实际工程系统(控制、电子、通信系统)中常用相 角(位)裕度(量)和幅值裕度(量)h表示。
20lg
x 1 x2 1 0.01• x2
x 0x2
20 20lg 3.162 6.02dB
P198
5-13
已知系统的开环传递函数 G(s) 试计算K=4、10的稳定裕度。
s
K
13
G( j)
K=4时:
K
j 13
K
( 2
3
1) 2
exp j(3tg1 )
j
4
(c 2
3
1) 2
1
相角裕度: =1800+ ∠ G(jc)
稳定裕度的定义续2
20lgG( jc )H( jc ) 0dB
1800 G jc H jc
00
dB h 0dB
(x ) G jx H j x 1800
h 20lg G( jx ) dB
00
dB h 0dB
0
c
负幅值裕度 h
j
G(j )曲线过(-1,j0)点时
G(j) =1
-1
∠ G(j) = -180o G(j)
0
同时成立!
此时,截止频率等于穿越频率
=0+
G( j )
K
j( jT1 1)( jT2 1)
1 =0
幅值裕度: hdB=-20lgG(jx )
c
0dB
20lg G( jx )
c
x
∠ G(jc)
-180o
最小相位系统的相位裕度和增益裕度都是正值时, 系统才是稳定的。负的裕度表示系统不稳定。
适当的相角裕度和幅值裕度可以防止系统参数变化 造成的影响,并且指明了频率值。
工程(实践)上满足: 控制系统的性能要求:
相角裕度: 300 ~ 600
幅值裕度: h 6~10dB
对数幅频曲线以 20dBdec 穿越0分贝线
一般来说,相角裕度和幅值裕度概念只适用于 最小相位控制系统(但可含滞后环节)。
举例 说明
Im
-1
0 Re
G( j)
K
j( jT1 1)( jT2 1)
Im
Im
Im
-1
0 Re
-1
0 Re
-1
0 Re
h(t)
h(t)
h(t)
h(t)
0
t
(a)
a系统不稳定
0
0
t
(b)
b系统临界稳定
(-1,j0)为临界点
试分别计算K=5、20的相角裕度和幅值裕度。
解:G( j )
K
e j 900 arctan arctan0.1
1 2 1 0.01 2
计算K=5:由图读出相角裕度和幅值裕度; 辅助计算
A( )
5
1 2 1 0.01 2
5
12
5 1,
02
c
5
0
180
900 arctan
P199 例5-13
已知二阶系统的开环传递函数为G(s) n2 试计算相位裕量与阻尼比 的关系。 s(s 2n )
解:
G( j)
2 n
j( j 2 n )
2
2 n
2 n 2
exp
j
900
arctan
2 n
A(c ) G( jc )H( jc ) 1
n2
1
c c2 2 n 2
定义幅值裕度为
h
1
G jx H jx
幅值裕度h的物理意义:
对于闭环稳定系统,如果系统开环幅频特性再增大h
倍,则系统将变为临界稳定状态。h 值越大,保证系统稳
定工作的前提下,允许开环增益值变化越大。若以分贝表
示,则有:
h
20lg
G
j x
1
H
j x
20lg G jx H jx (dB)
系统临界稳定,见右图:
0
正h 幅值裕度
c
90 180 270
+
x
正相角裕度
(a)稳定系统
90
180 270
x -
负相角裕度
(b)不稳定系统
相角裕度和幅值裕度小结:
相角裕度和幅值裕度是系统的极坐标图对(-1,j0)点 靠近程度的度量。这两个裕度可以作为设计准则。
只用相角裕度或幅值裕度,都不能说明系统的相对 稳定性。系统的相对稳定性必须同时给出这两个量。
A()
20
1 2 1 0.01 2
20
12
20 1,
02
c
20
0
180
900 arctan
20 arctan0.1•
20 900 77.40 24.10 11.50
(x )
900
arctan x
arctan
0.1 x
0
180
x
3.16 rads
20
20
h 20lg
5 arctan0.1•
5 900 65.90 12.60
11.50
(x ) 900 arctan x arctan 0.1x 1800 x 3.16 rads
5
5
5
h 20lg
x
1 x2
20lg
1 0.01•x2
x
0 x2 20lg 3.162 6.02dB
计算K=20:由图读出相位裕量和幅值裕量 辅助计算
相位裕度的物理意义:
对于闭环稳定系统,如果开环相频特性再滞后 度,则系统将由稳定变为临界稳定。
为了使最小相位系统稳定,相角裕度必须为正。 在对数坐标图上的临界稳定点为0dB和-1800
幅值裕度又称增益裕度(Gain Margin)
相角为-180°点所对应的频率为穿越频率
(x ) G jx H j x 1800
0
t
t
(c)
(d)
c、d系统稳定
幅相曲线越远离临界点
系统的稳定程度越好
▪相角裕度又称相位裕度(Phase Margin)
设系统的截止频率为 c
A(c ) G( jc )H( jc ) 1, L(c ) 0dB
定义相角裕度为 G jc H jc 1800
1800 G jc H jc
0 4 0 10
1
-1
c 163 1 1.23
1 1800 c
G ( j )
1800 3tg11.23 27.10
(x ) 3tg1x 0 , x 3
h1 20lg G( jx ) 20lg
1800 G jc H jc
1800 900 arctan c 2 n
=arctan 2n c
c n 1 4 4 2 2
arctan
2
1 4 4 2 2
P200 例5-14(图解法、近似计算法、精确计算法)
已知系统的开环传递函数,试计算 G(s)
K
s(s 1)(0.1s 1)