非线性观测器与滑模控制
基于非线性扰动观测的储能双向DC-DC变换器非奇异终端滑模控制策略

基于非线性扰动观测的储能双向DC-DC变换器非奇异终端滑模控制策略苏泳;陈艳峰【期刊名称】《储能科学与技术》【年(卷),期】2024(13)5【摘要】在光储直流微电网系统中,储能双向DC-DC变换器在储能设备与直流母线之间起着关键的接口作用,其在光伏输出功率及负载大信号扰动下的性能优劣至关重要,将直接影响着直流母线电压的稳定运行。
为此,提出了一种基于非线性扰动观测器(nonlinear disturbance observer,NDO)的非奇异终端滑模控制策略。
首先采用基于微分几何理论的精确反馈线性化方法,将双向DC-DC变换器系统的状态空间模型转化为布鲁诺夫斯基标准式,并利用非线性扰动观测器对系统扰动量进行估计和补偿。
在此基础上设计非奇异终端滑模控制器,并根据李雅普诺夫稳定性理论,证明所提控制策略的稳定性;进而分析所提控制策略的收敛性。
最后,通过仿真验证所提控制策略的有效性。
仿真结果表明,与文献中典型非线性控制策略相比,本文所提控制策略在光伏输出功率和负载有较大扰动时响应时间较快,并具有电压过充小、稳态误差小的优点。
【总页数】9页(P1523-1531)【作者】苏泳;陈艳峰【作者单位】华南理工大学电力学院【正文语种】中文【中图分类】TM46【相关文献】1.基于非奇异终端滑模技术的DC-DC Buck变换器研究2.基于扰动观测器和新型非奇异快速终端的PMSM滑模控制3.基于扰动观测器的永磁直线电机高阶非奇异快速终端滑模控制4.基于扰动观测器的永磁同步电机非奇异终端滑模控制5.基于新型趋近律和扰动观测器的永磁同步电机非奇异终端滑模控制因版权原因,仅展示原文概要,查看原文内容请购买。
先进控制理论-滑膜控制
1 滑模控制概述变结构系统,广义地说,是在控制过程(或瞬态过程)中,系统结构(或模型)可发生变化的系统。
这种控制方法的特点就在于系统的“结构力不是固定的,而是可以在动态过程中,随着系统的变化,根据当前系统状态,系统的各阶导数和偏差等,使系统按照设计好的“滑动模态”的状态轨迹运动。
由于滑动模态可以进行设计并且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
这种方法的缺点是当系统状态运行到滑模面后,难于严格地沿着滑模面向平衡点滑动,而是在滑模面两侧来回穿越,从而产生抖动。
滑模变结构控制是一种先进的控制方法,文献[34-51]讲述了这种控制方法是20世纪50年代,前苏联学者Emelyanov 首先提出了变结构控制的概念之后,UtkinE 等人进一步发展了变结构理论。
具有滑动模态的变结构系统不仅对外界干扰和参数摄动具有较强的鲁棒性,而且可以通过滑动模态的设计来获得满意的动态品质。
在这种控制方法的初始阶段研究的对象为二阶及单输入的高阶系统,采用的分析方法为相平i 酊法来分析系统特性。
20世纪70年代以来研究对象转变为状态空问的线性系统,使得变结构控制系统设计思想得到了不断丰富,并逐渐成为一个相对独立的研究分支,成为自动控制系统的一种设计方法,适用于线性与非线性系统、连续与离散系统、确定性与不确定性系统、集中参数与分布参数系统、集中控制与分散控制等。
并且在实际工程中逐渐得到推广应用,如电机与电力系统控制、机器人控制、飞机控制、卫星姿态控制等。
这种控制方法通过控制量的切换使系统状态沿着滑模面滑动,使系统在受到参数摄动和外干扰时具有不变性,正是这种特性使得变结构控制方法得到了越来越广泛的应用。
2 滑模控制的基本思想考虑一般的情况,在系统)(.x f x = nR x ∈的状态空间中,有一个切换面是0),,,()(321=⋯⋯=n x x x x s x s 它将状态空间分成上下两部分S>0及S<0。
滑模控制最强解析
滑模控制最强解析滑模控制是一种常用的控制方法,它具有快速响应、鲁棒性强等优点,被广泛应用于工业控制、航空航天、机器人等领域。
本文将从原理、应用、优缺点等方面进行解析。
一、原理滑模控制是一种基于滑模面的控制方法,其核心思想是通过引入一个滑模面,使得系统状态在滑模面上运动,从而实现对系统的控制。
具体来说,滑模面是一个超平面,其方程为s(x)=0,其中s(x)是系统状态的某个函数。
当系统状态在滑模面上运动时,控制器对系统进行控制,使得系统状态沿着滑模面快速收敛到目标状态。
二、应用滑模控制在工业控制、航空航天、机器人等领域都有广泛的应用。
例如,在工业控制中,滑模控制可以用于电机控制、温度控制、压力控制等方面。
在航空航天领域,滑模控制可以用于飞行器的姿态控制、飞行高度控制等方面。
在机器人领域,滑模控制可以用于机器人的运动控制、路径规划等方面。
三、优缺点滑模控制具有快速响应、鲁棒性强等优点。
由于滑模控制是一种非线性控制方法,因此可以应对系统的非线性特性,具有较强的鲁棒性。
此外,滑模控制的响应速度较快,可以实现对系统的快速控制。
然而,滑模控制也存在一些缺点。
首先,滑模控制需要引入一个滑模面,这会增加系统的复杂度。
其次,滑模控制对系统的模型要求较高,需要准确地建立系统的数学模型。
最后,滑模控制在实际应用中可能会出现滑模面跳动等问题,需要进行相应的处理。
综上所述,滑模控制是一种常用的控制方法,具有快速响应、鲁棒性强等优点,被广泛应用于工业控制、航空航天、机器人等领域。
然而,滑模控制也存在一些缺点,需要在实际应用中进行相应的处理。
应用非线性干扰观测器的反推终端滑模飞行控制

2 1 年7 0 2 月
应
用
科
学
学
报
Vo .30 N 0 1 .4
J l 01 u 2 2
J U R N A L O F PP LI O A ED C I N CE S — E lc r ni sa n o m a i n E n i e i S E — e t o c nd I f r to g ne rng
2 c o l fC mp trE gn e n n ce c, h n h iU iest, h n h i2 0 7 , hn .S h o o o ue n ier ga dS in e S a g a nvri S a g a 0 0 2 C ia i y
A b t a t A a k t p n e m i l si i g m o e c n r l s h me b s d o o l e r dit r a c bs r e src: b c s e pi g t r na l n d d o to c e a e n n ni a su b n e o e v r n
W AN G i n h o J a — a . HU i n bo . ZH AN G .e g Ja — Bo f n
』 .En i e i g Co lg , r Fo c g ne r n n v r iy g ne r n le e Ai r e En i e g U i e st ,Xia t7 0 8 i ’T 1 3 ,Ch n 0 ia
DO : 0 9 9 jsn0 5 —2 7 0 2 4 1 I 1 . 6 /. s .2 58 9 . 1反推终端滑 模 飞行控 制
王坚浩 胡剑波 , 张博锋 ,
控制系统的滑模控制理论与方法
控制系统的滑模控制理论与方法滑模控制(Sliding Mode Control,SMC)是一种针对非线性系统的控制方法,它通过引入一个滑模面,使系统状态在这个面上滑动,从而实现对系统的控制。
本文将介绍滑模控制的理论基础和常用方法,并分析其在控制系统中的应用。
一、滑模控制的基本原理滑模控制是一种基于滑模面的控制策略,其基本原理可以归纳为以下几点:1. 滑模面的选取:滑模面是指系统状态在该面上滑动的一个超平面,通过适当选取滑模面可以实现对系统状态的控制。
滑模面通常由线性和非线性组成,其中线性部分用于系统稳定,非线性部分用于解决系统的鲁棒性问题。
2. 滑模控制律:在滑模控制中,需要设计一个控制律来将系统状态引入滑模面,并保持系统在滑模面上滑动。
控制律通常由两部分组成:滑模面控制部分和滑模面切换部分。
滑模面控制部分用于实现系统状态在滑模面上滑动的动力学特性,滑模面切换部分用于保持系统状态在滑模面上滑动直至系统稳定。
3. 滑模模态:滑模模态指的是系统状态在滑模面上滑动的特性。
通常情况下,滑模模态可以分为饱和模态和非饱和模态两种。
在饱和模态下,系统状态在滑模面上滑动的速度有上限,从而保证系统的稳定性。
而在非饱和模态下,系统状态在滑模面上滑动的速度无上限,可以实现更快的响应速度。
二、滑模控制的方法与技巧在实际应用中,滑模控制可以采用不同的方法和技巧进行设计和实现。
以下是一些常见的滑模控制方法和技巧:1. 内模态滑模控制:内模态滑模控制是一种将滑模控制与内模态控制相结合的方法,通过在滑模控制律中引入内模态控制的思想,可以提高系统的鲁棒性和动态性能。
2. 非等效控制:非等效控制是一种通过选择系统输出和滑模面的差异性来实现控制的方法。
通过设计非等效控制律,可以对滑模模态进行优化,提高系统的控制性能。
3. 离散滑模控制:离散滑模控制是一种将滑模控制应用于离散时间系统的方法。
通过在离散时间下设计滑模控制律,可以对离散系统进行稳定控制和鲁棒性设计。
非线性观测器设计
ρ ≥ r1 u + a (t , y ) + η
得到的误差系统
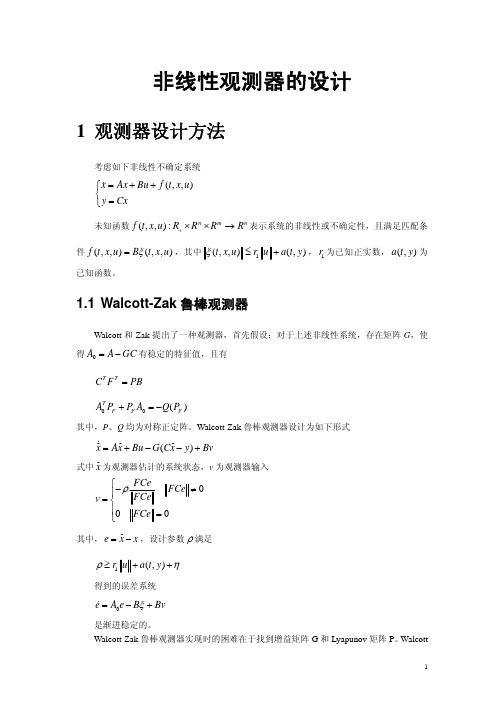
= A0 e − Bξ + Bv e
是渐进稳定的。 Walcott-Zak 鲁棒观测器实现时的困难在于找到增益矩阵 G 和 Lyapunov 矩阵 P。 Walcott
1
和 Zak 提出了如下算法: (1)选择 A0 的谱,计算相应的矩阵 G; (2)根据 C F = PB ,用 F 的各个分量表示 P,保证 P 对称正定;
初始状态 x = [ 0.5
ˆ = [ 0.2 −0.3 0.5] , 0.8 −1] ,x 非线性项 f (t , x, u ) 满足匹配条件,
T T
函数 ξ 为 ξ (t , x, u ) = [ 2sin(2π t )
2 cos(2π t ) ] ,因此 ξ (t , x, u ) ≤ 2 。
e1 e2 e3
time/s
图 3-14 观测器误差 e
9
4
v1 v2
2
0
v
-2
-4 0
1
2
time/s
3
4
5
图 3-15 观测器输入 v
0.5 0 -0.5 -1 s -1.5 -2 -2.5 -3 0 1 2 3 4 5
s1 s2
time/s
图 3-16 滑动模态 s
4 Matlab 程序
4.1 Walcott-Zak 鲁棒观测器程序
sT MB ≠ 0
参数选择与上节相同, ε = 0.2 。
3 仿真结果
3.1 Walcott-Zak 观测器
0.6 0.4 0.2 x1 0 -0.2 -0.4 0
滑模控制技术在机械臂路径跟踪的应用

滑模控制技术在机械臂路径跟踪的应用一、滑模控制技术概述滑模控制技术是一种非线性控制方法,起源于20世纪50年代,最初应用于航空领域。
它的核心思想是通过设计一个滑动面,使得系统状态能够从初始状态到达这个滑动面,并在其上滑动至目标状态。
滑模控制具有快速响应、抗干扰能力强、易于实现等优点,因此在工业自动化、机器人控制等领域得到了广泛的应用。
1.1 滑模控制技术原理滑模控制技术的基本原理是选择一个合适的滑动面,使得系统状态在该面上的动态行为满足期望的性能指标。
当系统状态达到滑动面时,控制作用会使得状态沿着滑动面滑动,直至达到期望的平衡状态。
滑模控制的关键在于滑动面的设计,它决定了系统的动态性能和稳定性。
1.2 滑模控制技术特点滑模控制技术具有以下特点:- 强鲁棒性:对系统参数变化和外部干扰具有较强的不敏感性。
- 快速性:能够快速响应系统状态的变化,实现快速跟踪。
- 易于实现:控制算法结构简单,易于在数字控制系统中实现。
- 可调整性:通过调整控制参数,可以灵活地满足不同的性能要求。
二、机械臂路径跟踪问题机械臂路径跟踪是机器人技术中的一个重要问题,它要求机械臂能够按照预定的路径精确地移动,以完成各种任务。
路径跟踪的精度直接影响到机械臂的操作性能和任务完成的质量。
2.1 机械臂路径跟踪的重要性机械臂路径跟踪的精确性对于提高生产效率、保证产品质量具有重要意义。
在自动化生产线、医疗手术、空间探索等领域,精确的路径跟踪是实现高效、安全操作的基础。
2.2 机械臂路径跟踪的挑战机械臂路径跟踪面临诸多挑战,包括:- 动力学不确定性:机械臂的动力学特性可能因负载变化、磨损等因素而发生变化。
- 外部干扰:环境因素如温度、湿度、振动等可能对机械臂的运动产生影响。
- 非线性特性:机械臂的动力学模型通常具有非线性特性,增加了控制的复杂性。
三、滑模控制在机械臂路径跟踪中的应用将滑模控制技术应用于机械臂路径跟踪,可以有效提高跟踪精度和系统稳定性。
基于非线性干扰观测器的自动弹仓终端滑模控制
了速度环抗负载扰动的能力.文献[
14]针对四旋
翼飞行器运动过程存在参数变化和外部扰动的问
题,设计了一种非线性干扰观测器(用于消除外部
扰动的干扰,减小滑模控制的不连续控制增益)和
自适应滑模结合 的 控 制 策 略,数 值 仿 真 和 实 验 验
证了该控制策略合理有效.
扰动情况下的自动弹仓鲁棒控制器是一个亟待解
决的问题.
滑模控制具有鲁棒性强、方法简单、容易工程
响,负载变化导致的系统惯量参数变化、无法精确
化的优点,被大量用于机电控制领域 [2G4].采 用 线
建模的非线性摩 擦、时 变 的 啮 合 碰 撞 以 及 链 传 动
的误差以指数方 式 渐 近 收 敛,系 统 状 态 只 能 趋 近
anc
e,andt
heobs
e
r
vedva
l
uewa
sc
ompens
a
t
edi
nt
hes
l
i
d
i
ng modecon
t
r
o
l
l
e
rwh
i
chimp
r
ovedt
her
o
G
bus
t
ne
s
sandan
t
i
G
d
i
s
t
u
rbanc
ec
apab
i
l
i
t
fs
t
em.Cl
os
ed
G
l
oops
t
ab
i
l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非线性观测器与滑模控制
在现代控制理论中,非线性观测器与滑模控制是两种常用的控制方法,它们具有很好的鲁棒性和适应性,广泛应用于各类系统的控制与
观测中。
一、非线性观测器
非线性观测器是一种通过测量系统输出和知道系统模型的某些特性
来估计系统状态的方法。
它的主要思想是通过对系统的输出进行观测,结合系统模型、测量数据以及数学方法,估计出系统的状态信息。
非
线性观测器通常分为两种类型:确定性观测器和自适应观测器。
确定性观测器是基于系统的数学模型和测量数据,通过一定的数学
运算来预测和估计系统的状态。
它的优点是精确度高,但需要事先了
解系统的数学模型和参数信息。
在一些具有稳定的系统模型和已知参
数的应用中,确定性观测器可以提供高效准确的状态估计。
自适应观测器是一种适应系统动态特性和模型不确定性的观测方法。
它通过对系统输出进行连续的观测和适应性参数估计,实时地调整观
测器的参数,使其能够适应系统的变化和不确定性。
自适应观测器具
有较强的适应性和鲁棒性,在系统模型和参数不确定的情况下,仍能
够提供较好的状态估计。
二、滑模控制
滑模控制是一种基于滑动模态的非线性控制方法。
它的核心思想是
通过构造一个滑动面,使系统状态在这个滑动面上滑动,并通过控制
器的设计来实现对滑动过程的控制。
滑模控制具有很好的鲁棒性和抗
干扰能力,对于系统模型不准确或存在不确定性的情况下仍能保持较
好的控制性能。
滑模控制的基本步骤包括滑模面的设计、滑模控制律的构造和滑模
开关函数的设计。
其中,滑模面的设计是滑模控制的核心,它既要保
证系统的稳定性,又要使系统的响应速度和鲁棒性得到优化。
滑模控
制律的构造是通过设计适当的控制算法,使系统状态在滑模面上滑动,并实现对系统状态的控制。
滑模开关函数的设计是为了实现滑模控制
的切换和保持。
三、非线性观测器与滑模控制的结合
非线性观测器与滑模控制可以结合起来,形成一种更加鲁棒和适应
性强的控制方法。
在这种结合方法中,非线性观测器用于估计系统的
状态信息,而滑模控制用于实现系统的控制。
非线性观测器可以通过
对系统的输出进行观测和估计,提供较准确的状态信息,滑模控制可
以通过控制算法对系统进行实时的控制,实现对系统状态的稳定和可控。
非线性观测器与滑模控制的结合可以充分利用它们各自的优势,提
高系统的鲁棒性和控制性能。
在一些复杂的非线性系统控制中,非线
性观测器可以提供较好的系统状态估计,减小系统模型不确定性的影响;而滑模控制可以通过其非线性控制特性,实现对系统的快速响应
和较好的控制精度。
总结起来,非线性观测器与滑模控制是两种常用的控制方法,它们在不同的应用场景中具有各自的优势和特点。
在实际应用中,可以根据系统的特性和要求,选择合适的控制方法进行设计和实现,以达到更好的控制效果。
通过合理的设计和参数调整,非线性观测器与滑模控制可以提供稳定、鲁棒和高性能的控制方案,为实际工程问题的解决提供有效的手段。