加速度传感器课程论文
汽车传感器毕业论文

汽车传感器毕业论文汽车传感器毕业论文随着科技的不断发展,汽车行业也在不断进步和创新。
传感器作为汽车电子系统中的重要组成部分,发挥着关键的作用。
本篇论文将探讨汽车传感器的发展历程、应用领域以及未来的发展趋势。
一、汽车传感器的发展历程汽车传感器的发展可以追溯到20世纪70年代。
当时,汽车制造商开始意识到传感器在提高汽车性能和安全性方面的潜力。
最早应用的传感器是发动机控制系统中的氧气传感器,用于监测排放气体中的氧气含量,以便调整燃油供给量。
随后,各种类型的传感器相继应用于汽车中,包括温度传感器、压力传感器、加速度传感器等。
二、汽车传感器的应用领域1. 发动机控制系统发动机控制系统是汽车传感器最广泛应用的领域之一。
传感器可以监测发动机温度、氧气含量、油压等参数,以便实时调整燃油供给量和点火时机,从而提高燃烧效率和减少排放。
2. 制动系统制动系统是汽车安全性最重要的部分之一。
传感器可以监测制动液位、制动片磨损程度等参数,以便提醒驾驶员及时更换制动片,保证制动系统的正常工作。
3. 环境控制系统环境控制系统包括空调系统和空气质量监测系统。
传感器可以监测车内外温度、湿度等参数,以便调整空调系统的工作状态,提供舒适的驾驶环境。
同时,传感器还可以检测车内空气中的有害气体浓度,保证乘客的健康和安全。
4. 安全辅助系统安全辅助系统是近年来汽车传感器应用的热点领域之一。
传感器可以监测车辆周围的环境信息,如距离、速度等,以便提供智能驾驶辅助功能,如自动紧急制动、盲区监测等,提高行车安全性。
三、汽车传感器的未来发展趋势1. 智能化和网络化随着人工智能和物联网技术的不断发展,汽车传感器将变得更加智能化和网络化。
传感器将能够实现自主学习和决策,从而更好地适应不同的驾驶环境。
同时,传感器之间将能够实现数据共享和协同工作,提高整体系统的性能。
2. 多功能化和集成化传感器的多功能化和集成化是未来的发展趋势。
传感器将不仅仅用于单一的应用领域,而是具备多种功能,如温度、湿度、压力等多个参数的监测。
课程设计 基于加速度传感器的计步器设计

课程设计(报告)题目:基于加速度传感器的计步器设计课程:传感器与检测技术基于加速度传感器的计步器设计摘要随着我们生活水平的不断提高,社会各阶层的人们开始对身体健康尤其的关注。
然而健身的方法数不胜数,步行是最好的运动之一。
健康需要走出来,行走锻炼——人类生命健康的加氧站。
步行是一种静中有动、动中有静的健身方式,可以缓解神经肌肉紧张。
据专家实验得出,当烦躁、焦虑的情绪涌上心头时,我们以轻快的步伐散步15分钟左右,即可缓解紧张、稳定情绪。
计步器功能可以根据计算人的运动情况来分析人体的健康状况。
而人的运动情况可以通过很多特性来进行分析。
比如人在运动时会产生加速度。
论文主要采用了以单片机AT89C52为核心的计步器控制系统,并实现运动计步,是通过人运动时产生加速度变化来实现的,本文利用具有体积小,功耗低,三轴加速度传感器MMA7455来实现,采集到的加速度数据通过适当的算法就可以实现计步功能,最后通过LCD1602给予显示。
本设计的特色在于完整的设计出计步器及其控制电路,整个系统具有控制方便,检测精确,硬件结构简单,方便携带,成本较低等优点。
关键词:单片机;加速度传感器;液晶显示Abstract With our continuous improvement of living standards, social strata, especially the health of people began to concern. However, numerous methods of fitness, walking is the best exercise one. Health needs to come out, walking exercise - human life and health and oxygen station. Walking is a static in action, moving in a static way of fitness, can relieve nerve muscle tension. According to experts, experimentally derived, when irritability, anxiety in my heart, we are walking at a brisk pace for about 15 minutes, you can relieve tension, emotional stability. Pedometer function can be calculated according to the movement of the person to analyze human health. And the movement of people can be analyzed through a number of characteristics. Such as human in motion will produce accelerations.Thesis uses a microcontroller AT89C52 as the core control system pedometer, pedometer and achieve movement is produced by the human movement acceleration change to achieve, this paper has a small size, low power consumption, triaxial acceleration sensor MMA7455 to implementation, the acceleration data collected through appropriate algorithms can achieve step count, and finally through LCD1602 given display.This design feature is the complete design of a pedometer and its control circuit, the whole system easy to control, detection accuracy, the hardware structure is simple, easy to carry, and low cost.Keywords: Mcrocontroller, Acceleration sensors, LCD目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题研究目的及意义 (1)1.2 国内外计步器的发展情况 (2)1.3 计步器的原理及分类 (3)2 计步器系统总体设计结构设计 (9)2.1 计步器总体设计 (9)2.2 三种计步器的对比 (9)2.3 系统硬件结构方案设计 (12)2.4 系统设计方案论证 (13)3 计步器系统硬件电路设计 (13)3.1 加速度传感器电路 (13)3.2 单片机系统电路 (20)3.3 LCD显示电路 (23)3.4 开关与电源电路 (25)4 计步器系统软件设计 (27)4.1 主程序流程图 (27)4.2 子程序流程图 (28)5 计步器调试与结果分析 (28)5.1 实物系统调试 (28)5.2 结果分析 (33)6 总结与展望 (33)参考文献 (34)附录程序代码 (35)1.绪论1.1课程研究目的及意义智能仪器是当代发展最为迅猛的科学技术,在工业领域得到了广泛的应用。
压电式传感器论文

压电式传感器的应用——压电式加速度传感器目录一、摘要.......................................二、引言.......................................三、关键词.....................................四、压电式加速传感器原理.......................五、压电式加速传感器构成.......................六、压电式加速度传感器的灵敏度....................七、等效电路...................................八、应用背景及实例.............................九、总结.......................................一、摘要压电式加速传感器是压电式传感器中应用最广泛的传感器之一。
近年来压电式加速传感器得到了较大的发展,本文重点讲解了压电式加速传感器的原理及构成元件,并对压电式传感器在实际生产生活中的应用做介绍。
二、引言压电效应(piezo electric effect)是由居里兄弟皮尔(P·Curie)与杰克斯(J·Curie)在1880年发现的。
1880年杰克斯在实验室发现了压电性。
起先,皮尔致力于焦电现象(pyroelectriceffect)与晶体对称性关系的研究,后来兄弟俩却发现,在某一类晶体中施以压力会有电性产生。
他们又系统的研究了施压方向与电场强度间的关系,及预测某类晶体具有压电效应。
经他们实验而发现,具有压电性的材料有:闪锌矿、钠氯酸盐、电气石、石英、酒石酸、蔗糖、方硼石、异极矿、黄晶及若歇尔盐。
这些晶体都具有各向异性结构,各向同性材料是不会产生压电性的。
(摘自百度百科)三、关键词压电式加速传感器、压电原理、压电效应、石英、压电陶瓷等。
《基于加速度传感器和无线传输的奶牛计步器系统》范文

《基于加速度传感器和无线传输的奶牛计步器系统》篇一一、引言随着现代农业技术的不断进步,奶牛养殖业对提高生产效率和优化养殖环境的关注度日益提升。
在众多技术手段中,基于加速度传感器和无线传输技术的奶牛计步器系统,为养殖业提供了新的解决方案。
本文将详细介绍这一系统的设计原理、技术实现及实际应用效果。
二、系统设计原理本系统主要基于加速度传感器和无线传输技术,实现对奶牛步数的实时监测和数据分析。
其中,加速度传感器负责捕捉奶牛的运动信息,无线传输技术则将数据实时传输至中央处理系统。
1. 硬件组成(1)加速度传感器:安装在奶牛身上的传感器设备,能够实时捕捉奶牛的运动数据,包括步数、步长等。
(2)无线传输模块:将加速度传感器采集的数据传输至中央处理系统。
(3)中央处理系统:对接收到的数据进行处理和分析,为养殖人员提供直观的数据展示和决策支持。
2. 工作原理本系统通过在奶牛身上安装传感器设备,实时捕捉奶牛的运动数据。
这些数据通过无线传输模块发送至中央处理系统。
中央处理系统对接收到的数据进行处理和分析,得出奶牛的步数、活动量等指标,并通过直观的界面展示给养殖人员。
三、技术实现1. 传感器选择与安装本系统采用高灵敏度的加速度传感器,可精确捕捉奶牛的运动信息。
传感器设备通过安全、无创的方式安装在奶牛身上,确保不影响奶牛的正常活动。
2. 无线传输技术本系统采用低功耗的无线传输技术,确保数据的实时传输。
同时,该技术具有较高的抗干扰能力,确保在复杂环境下数据的稳定传输。
3. 中央处理系统设计中央处理系统采用高性能的计算机或服务器,具备强大的数据处理和分析能力。
系统软件采用友好的界面设计,为养殖人员提供直观的数据展示和决策支持。
四、实际应用效果本系统在奶牛养殖业中具有广泛的应用价值。
首先,通过对奶牛步数的实时监测,可以了解奶牛的活动量,评估其健康状况。
其次,通过对奶牛活动量的数据分析,可以优化饲养管理,提高生产效率。
此外,本系统还具有以下优点:1. 提高养殖效率:通过实时监测奶牛的活动量,养殖人员可以及时调整饲养策略,提高养殖效率。
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
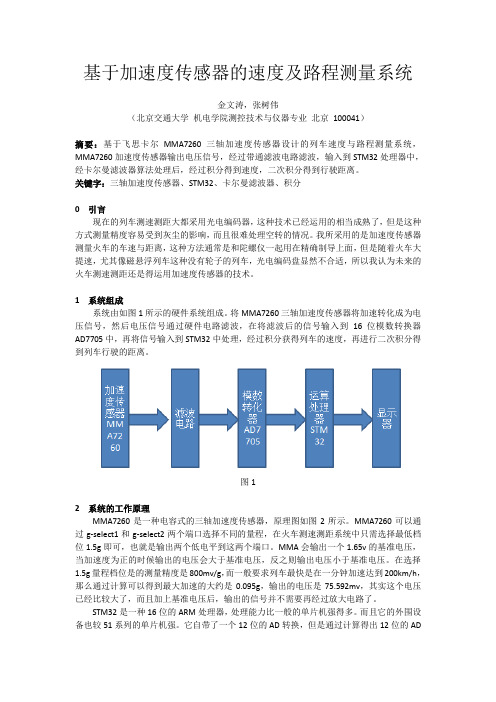
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
传感器课程设计--压电式加速度传感器的设计

课程设计说明书题目:压电式加速度传感器的设计学院(系):电气工程学院课程设计(论文)任务书院(系):电气工程学院基层教学单位:自动化仪表系说明:此表一式四份,学生、指导教师、基层教学单位、系部各一份。
目录示例目录第1章摘要 (1)第2章引言 (2)第3章电路仿真及准备作 (3)第4章压电式加速度传感器的参数设计及计算 (12)4.1 结构设计 (12)4.2 电容设计与计算 (12)4.3 其他参数的计算 (12)第5章误差分析 (13)第6章结论 (14)心得体会 (14)参考文献 (15)第一章摘要传感器是一门集合多种科学技术的科学,它利用各种原理如光电效应、压电效应,等等的原理,来根据被测物体的变化来反映待测量的变化的科学。
传感器是在现今科学领域中实现信息化的基础技术之一。
现代测量、控制与自动化技术的飞速发展,特别是电子信息科学的发展,极大地促进了现代传感器技术的发展。
传感器的使用也越来普遍,在当今社会里起到了很大的作用,与此同时传感器的技术要求也在不断提高,对传感器的设计,性能,功能提出了更高的要求,显而易见传感器在以后的社会发展中将会起到越来越重要的作用。
压电式传感器是基于压电效应的传感器。
压电效应是一种能实现机械能与电能相互转换的效应,当有力作用于压电元件上时,压电元件会产生电荷,传感器中利用电荷放大电路,将电荷的变化表现到电压的变化,从而来确定待测物体的运动状态。
经过一定转换电路来实现我们所需要的测量的输出。
压电式传感器的优点是频带宽、灵敏度高、信噪比高、结构简单、工作可靠和重量轻等。
缺点是某些压电材料需要防潮措施,而且输出的直流响应差,需要采用高输入阻抗电路或电荷放大器来克服这一缺陷。
第二章引言压电式传感器是基于压电效应的传感器,就要求必须将电荷的变化通过电路来表现出来,这就要求将电荷的变化转换成电路中电流的变化或者电压的变化,此时必须用到电荷放大电路来实现。
电荷放大电路是压电传感器的核心电路,它将电荷的变化转换电压的变化,从而实现了测量的意义,可以根据电压的变化来判断被测物体的变化或者运动状态。
课程设计(论文)—应变式加速度传感器设计
一.传感器设计1、应变式加速度传感器简介能感受规定的被测量并按一定规律转换成可用信号输出的器件或装置,称为传感器,通常由敏感元件和转换元件组成。
应变式加速度传感器是一种低频传感器,由弹性梁,质量块,应变片及电桥等组成,质量块在加速度作用下,产生惯性力使弹性梁变形,引起应变片阻值发生变化,通过电桥来获取信号,是车辆振动测量常用传感器。
2应变式加速度传感器结构在这种传感器中,质量块支撑在弹性体上,弹性体上贴有应变片(图1)。
测量时,在质量块的惯性力作用下,弹性体产生应变,应变片把应变变为电阻值的变化,最后通过测量电路输出正比于加速度的电信号。
弹性体做成空心圆柱形增加传感器的固有振动频率和粘贴应变片的表面积。
另一种结构形式为悬臂梁式,弹性振梁的一端固定于外壳,一端装有质量块。
应变片贴在振梁固定端附近的上下表面上。
振梁振动时,应变片感受应变。
应变片可在测量电路中接成差动桥式电路。
应变片加速度计也适用于单方向(静态)测量。
用于振动测量时,最高测量频率取决于固有振动频率和阻尼比,测量频率可达3500赫。
下图是传感器结构图图1传感器结构简图Ebh H = R - R2- ⎪3 应变式加速度传感器特点这种结构灵敏度高,但体积较大,实际应用中需要硅油提供大的阻尼力应变式振动传感器的主要优点是低频响应好,可以测量直流信号(如匀加速度)。
4.计算设计:设计步骤根据设计指标估计如下结构参数: 梁长度:L (mm):11 梁宽度:b (mm):5 梁厚度:h (mm):0.5 质量块半径:r (mm):3 质量块厚度:c (mm):4 许用应力系数取:0.55;梁根部最大应变:ε max≤400 (μ ε )。
基本原理:质量块 M 在加速度 a 作用下产生惯性力: F = Maa梁在惯性力的作用下产生应变: ε = 6Lx x2Fa应变引起应变片阻值变化Δ R ,电桥失去平衡而输出电压,通过测量电压可求得 加速度。
计算梁的最大挠度挠度反映梁质量块的活动空间⎛ B ⎫2 ⎝ 2 ⎭(mm) w = ( R - H ) - (c + 0.5h) (mm)wmax< w 0(mm)6x=1.5929⨯ 10 -4 (ε/g ) x =3.1857e-006(ε/g ) Ebh 2如图所示,代入 R=7,B=6,c=4,h=0.5,得 H= 6.7544e-004mm, w =0.0021mm壳体质量: m =壳体体积 ⨯ 壳体材料密度 0质量块质量: m =质量块体积 ⨯ 质量块材料密度1弹性梁质量: m = 梁体积 ⨯ 梁材料密度(g) 2 硅油质量: m = 充油空间 ⨯ 硅油密度3质量块等效质量: M = m +m2(kg )1由上面给出的数据,可得 m =1.8g , m =0.216g12得 M=0.0105kg 。
加速度传感器
加速度传感器传感器是一种能将物理量、化学量、生物量等转换成电信号的器件。
输出信号有不同形式,如电压、电流、频率、脉冲等,能满足信息传输、处理、记录、显示、控制要求,是自动检测系统和自动控制系统中不可缺少的元件。
如果把计算机比作大脑,那么传感器则相当于五官,传感器能正确感受被测量并转换成相应输出量,对系统的质量起决定性作用。
自动化程度越高,系统对传感器要求越高。
在今天的信息时代里,信息产业包括信息采集、传输、处理三部分,即传感技术、通信技术、计算机技术。
现代的计算机技术和通信技术由于超大规模集成电路的飞速发展,而已经充分发达后,不仅对传感器的精度、可靠性、响应速度、获取的信息量要求越来越高,还要求其成本低廉且使用方便。
显然传统传感器因功能、特性、体积、成本等已难以满足而逐渐被淘汰。
世界许多发达国家都在加快对传感器新技术的研究与开发,并且都已取得极大的突破。
如今传感器新技术的发展,主要有以下几个方面:一.发现并利用新现象利用物理现象、化学反应、生物效应作为传感器原理,所以研究发现新现象与新效应是传感器技术发展的重要工作,是研究开发新型传感器的基础。
日本夏普公司利用超导技术研制成功高温超导磁性传感器,是传感器技术的重大突破,其灵敏度高,仅次于超导量子干涉器件。
它的制造工艺远比超导量子干涉器件简单。
可用于磁成像技术,有广泛推广价值。
利用抗体和抗原在电极表面上相遇复合时,会引起电极电位的变化,利用这一现象可制出免疫传感器。
用这种抗体制成的免疫传感器可对某生物体内是否有这种抗原作检查。
如用肝炎病毒抗体可检查某人是否患有肝炎,起到快速、准确作用。
美国加州大学已研制出这类传感器。
传感器的发展历程二.利用新材料传感器材料是传感器技术的重要基础,由于材料科学进步,人们可制造出各种新型传感器。
例如用高分子聚合物薄膜制成温度传感器;光导纤维能制成压力、流量、温度、位移等多种传感器;用陶瓷制成压力传感器。
高分子聚合物能随周围环境的相对湿度大小成比例地吸附和释放水分子。
基于MEMS技术的加速度传感器研究
基于MEMS技术的加速度传感器研究近年来,随着科技的发展,MEMS(微机电系统)技术在各个领域的应用越来越广泛。
其中,基于MEMS技术的加速度传感器在运动测量、姿态控制、安全监测等方面具有重要的应用价值。
本文将探讨基于MEMS技术的加速度传感器的原理、制备技术以及应用案例。
加速度传感器是一种能够测量物体加速度或者重力的传感器。
MEMS技术结合了微电子技术和微机械技术,使得传感器的尺寸变得非常小,并且能够批量生产。
基于MEMS技术的加速度传感器通常由微机械加速度传感器和集成电路两部分组成。
微机械加速度传感器通常采用质量悬浮结构,当受到外力作用时,质量将发生位移,由此测量加速度。
制备基于MEMS技术的加速度传感器需要经历多个步骤。
首先,通过光刻技术在硅衬底上形成质量悬浮结构。
然后,将金属电极沉积在衬底上,形成电容结构。
接着,通过刻蚀等工艺,雕刻出质量悬浮结构和电容结构。
最后,借助封装技术和集成电路,将传感器制作完整。
基于MEMS技术的加速度传感器具有许多优势。
首先,尺寸小,可以实现微型化和集成化,方便嵌入各类设备。
其次,价格相对较低,适用于大规模应用。
此外,基于MEMS技术制备的加速度传感器具有很高的灵敏度和稳定性,能够精确测量加速度和重力。
基于MEMS技术的加速度传感器在多个领域有广泛的应用。
在运动测量方面,加速度传感器可以用于测量运动物体的加速度和速度,应用于运动跟踪、步数统计等场景。
在姿态控制方面,加速度传感器可以用于测量物体的倾斜角度和旋转角度,应用于飞行器、机器人等设备的姿态控制。
另外,在安全监测方面,加速度传感器可以用于检测物体的碰撞、震动等,应用于汽车碰撞预警、地震预警等领域。
综上所述,基于MEMS技术的加速度传感器具有广泛的应用前景。
由于其尺寸小、灵敏度高和稳定性好等特点,使得加速度传感器在运动测量、姿态控制和安全监测等方面取得了重要的突破。
未来,随着MEMS技术的不断进步和创新,相信基于MEMS技术的加速度传感器将在更多领域发挥重要作用,为人们的生活带来更多便利和安全。
传感器论文-压电加速度传感器
压电式加速度传感器论文学院工程学院专业电气自动化班级机电0902班学号 0930070135 姓名李政指导教师卫吉良目录目录..........................................................................................................................................一、国内外现状....................................错误!未定义书签。
二、压电加速度传感器原理 (4)1.压电式加速度传感器构成元件......................错误!未定义书签。
2. 压电式加速度传感器幅频特性 (7)3.压电式加速度传感器的灵敏度 (8)三、压电式加速度传感器误差形成因素分析 (9)四、提高压电加速度传感器频响的措施 (10)1.材料结构与设计..................................错误!未定义书签。
02.材料选择问题 (11)五、总结 (12)六、压电式加速度传感器的实际应用 (12)参考文献 (13)压电式加速度传感器目前,国内研制的高冲击压电加速度传感器的性能受材料、结构、工艺和安装等因素的影响,量程和上限频率难以得到提高,从而导致在高冲击下测量的线性度较差。
现在国内研制的压电传感器样机可测量的最大冲击加速度为1 OO,OOOg,安装谐振频率约为9.5kHz,线性度为10%,还不能完全满足工程使用的要求。
因此,为了满足高速碰撞测试和常规触发引信用压电加速度传感器的要求,本文研究提高压电加速度传感器的量程和频响的设计技术,这项技术可应用在钻地武器试验和深层钻地弹引信中。
在核武器飞行试验中,均要进行触地测试,了解核弹头碰地的状况,测量其触地加速度,为其触发引信的设计和验证提供依据。
在常规钻地弹、侵彻弹等武器研究中,均需要大量程高频响的加速度传感器进行测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
加速度传感器课程论文
ADXL05型单片加速度传感器的工作原理及实际应用
姓名:杨锐
电气四班(19)
前言:
单片加速度传感器的典型产品有美国ADI 公司生产的ADXL05、ADXL105.、ADXL190、ADXL202和ADXL210,还有美国Motorola公司生产的MMA1200D、MMA120IP和MMA1220D。
上述产品也称为加速度计( accelerometer),可广泛用于工业、交通、地矿、建筑及军事领域,既可测量重力加速度,又可以测量由振动、冲击所产生的加速度、速度,位移等参数,还能取代水银式倾斜仪测量倾斜角。
单片加速度传感器分模拟信号输出、数字信号输出两种形式,ADXL05、ADXL105和MMA1200D 均属于模拟电压输出式,ADXL202和ADXL210 则属于数字输出式,或者能输出与加速度成比例关系的占空比信号。
此外,ADXL05、ADXL105均属于单轴加速度传感器,只能测量沿X轴方向的加速度;ADXL202、ADXL210属于双轴加速度传感器,可同时测量沿X轴、Y轴两个方向的加速度。
1、ADXL05的工作原理
1.1 性能特点
(1)在ADXL05芯片中集成了一个完整的加速度测量系统,内部包含用单晶硅制成的电容式加速度传感器和信号调理器。
最大外形尺寸仅为φ9.4x19(mm),质量为5g。
(2)它属于力平衡式加速度传感器,测量加速度时满量程为±1~±5g (lg=9.8m/s),具体量程可通过外围元件来设定。
分辨力可达0.005g。
加速度计的电压比例系数为200mv/g,满量程时的非线性误差为±0.2%,谐振频率为12kHz。
(3)过载能力强,在0.5s内可承受1000g的冲击。
外围电路简单。
利用重力加速度可以校准传感器的极性。
芯片还具有自检功能,可检测传感器或外围元件是否发生故障。
(4)电源电压范围是+4.75~+5.25V,典型值为5V,工作电流约为8mA。
1.2.工作原理
1.2.1 引脚功能
ADXL05采用TO - 100封装,引脚排列如
图1-2-1所示。
图1-2-1 ADXL05的引脚功能
在它的第5、10脚之间有一个敏感轴,传感器对该方向上的惯性力(或振动)最为敏感。
Ucc端接5V电源,COM为公共地。
第2、3脚之间接电容C1,用以设定同步解调器的带宽。
第4脚与地之间接入振荡器的退耦电容C2。
Uref 为内部3.4V基准电压输出端。
ST为自检电平输入端,接高电平后进入自检模式,只要Upr超出规定的电压范围,就判定芯片或外围元件发生
故障。
Upr为前置放大器输出端。
Uo为缓冲放大器的输出端电压端。
Uin-为缓冲放大器的反相输入端,
可接由用户设定的输入电压。
1.2.2 工作原理
ADXL05型单片加速传感器的内部电路框图如图1-2-2-1所示。
图1-2-2-1 ADXL05单片加速度传感器的内部电路框图
主要包括以下6部分:①1MHz方波振荡器;
②加速度传感器;③同步解调器;④前置放大器A1;⑤基准电压源,可产生3.4、1.8V和0.2V 三种基准电压,其中的3.4V基准电压从Uref引脚输出,1.8V作为缓冲放大器的参考电压;⑥
缓冲放大器A2,其输出电压为U0。
需要指出Urp 、Uin、和U0端需通过电阻网络R1-R3相连,改变这些电阻值,即可设定输出电压的比例系数Kg。
根据需要,还可接阻容网络,构成交流耦合式加速度计。
C1用来设定同步解调器-3dB带宽,C2为振荡器退耦电容,C3为电源退耦电容。
加速度传感器的内部结构如图1-2-2-2所示。
图1-2-2-2 加速度传感器的内部结构
在工字梁上分布着46个敏感单元。
图中的
虚线框就表示其中一个敏感单元,内有一对平行板式差分电容Ca、Cb。
电容的中心极板固定在工字梁上。
图中的黑色区域表示支点。
1MHz振荡器产生两路方波电压U1和U2,二者的相位依次为0、180,分别加至Ca、Cb。
的上下极板上。
极板面积为S,介电常数为。
令加速度为零时两极板的距离为d,此时Ca=Cb= S/do.因为Ul、U2的幅度相等,相位差为180。
所以Ul=—U2,二者互相抵消后,该敏感单元的输出电压Uo1=0,表示加速度为Og。
当传感器受到方向向下的惯性力或冲击时,中心极板就产生位移量d1,使差分电容星不对称结构,C。
=eS/(do+d1),Ch=eS/(do- d1), 即Ca<Cb。
由于两个电容量不相等,就在中心极板上产生电压Uo1。
Uo1的幅度与加速度成正比。
46个敏感单元的总输出电压就等于各敏感单元输出电压的代数和,它与总加速度成正比。
经过同步解调器和前置放大器,得到解调后的电压Upr,其电压比例系数KPn=200mV/g 。
Upr信号分成两路,一路通过内部反馈电路接敏感单元的中心极板,使之恢复到Og的位置;另一路通过缓冲放大器获得输出电压Uo。
UO的电压比例系数为
K g =R
R R R K g mV PR 1
313)/200(= 举例说明,当R3 =R1时,Kg=200mV/g ;当R3| R1=2时,Kg=400mV/g ,依次类推。
2.1 直流耦合式加速度计
直流耦合式加速度计的电路参见图9-15。
取Ri=50k 、R2=274 k 、R3-100k 时,
可以测量-5~ +5g 范围内的加速度。
在Og 时,UO=2.5V ,- 3dB 增益带宽为O--
+ 1.6kHz 。
输出电压的比例系数Kg=400mV/g 。
设被测加速度a=ng ,有公式
U 0=1.8(1+R R R R 3213+)—R R U PR 1
3=K g ng 将Kg=400mV/g 代人式(9-8)中得到,UO=400n(mV)o 假定已知n ≤5,即Uo ≤2000mv ,能直接用2v 两成的数字电压表来测量U0,再将显示值除以nKg ,就得到被测加速度值。
2.2 交流耦合式加速度计
交流耦合式加速度计能够消除由重力加速
度和Og 漂移所造成的影响,其电路如图2-2 所示。
图2-2 交流耦合式加速度计的电路
C4为耦合电容,能起到隔直流的作用。
由R1、C4构成的高通滤波器下限频率为fl=1/(2丁cR.C4),对信号的衰减量为- 2dB。
对低于fL的频率,则按- 6dB/十倍频程的速率进行衰减,即频率降低到原来的I/IO时,信号就被衰减- 6dB。
2.3 ADXL05的校准方法
(1)校准极性。
利用重力加速度即可校准ADXL05的极性。
如图2-3-1所示,
图2-3-1 利用重力加速度可校准ADXL05的极性
(a) 敏感轴水平向右;
(b)敏感轴水平向左;
(c)敏感轴垂直向下;
(d)敏感轴垂直向上;
当敏感轴与地面平行时,传感器的输出电压就对应于Og。
当敏感轴与地面垂直时,输出电压就对应于一lg(敏感轴方向朝下),或者Ig(敏感轴方向朝上)。
利用上述特性很容易校准传感器的极性。
(2)自检。
给自检端ST接上一个TTL或CMOS高电平时,ADⅪD5就进入自检模
式。
此时UPR应变化一IV,若超过(一lt0.15)V,
即认为传感器或外围电路发生了故障。
能校准Og的自检电路如图2-3-2所示。
图2-3-2 能校准Og的自检电路RP为校准Og电平的微调电位器。
R1a用来校准Kg。
由和构成缓冲放大器的单极性后置滤波器。
进行自检时,首先将敏感轴置于如图所示的位置,然后调整RP,使U0=2.5V。
再依次使敏感轴处于如图(c)(d)的位置,U0的变化量就对应于2g的加速度。
9。