自动控制理论(邹伯敏)第3版_第5章答案 khdaw
《自动控制理论(第3版)》第05章课件
= Im
(1)极坐标图
A() = () = 90
0 =0
Re
(2)波特图
L() = 20lgA() = 20lg () = 90
注意:由于微分环节与
L()/dB
20
0
1
20dB/dec
10
积分环节的传递函数互
为倒数, L()和 ()
仅相差一个符号。因此,
()/(°)
90°
Im
=
=0
Re
0
1
36
8 延迟环节
其频率特性为 :G(j) = e jT 幅值为:A() = e jT = 1 相角为:() = T (rad) = 57.3T()
由于幅值总是1,相角随频率而变化,其极坐标图为一单位圆。
Im
L()/dB
0
0
=0
Re
()/(°)
0°
T大 T小
由于( )随频率的增长而线性滞后,将严重影响系统的稳定性 37
L ()2l0 g G (j) dB “分贝”
坐标特点 纵轴 (),(单位:度或者弧)度
⑴ 幅值相乘 = 对数相加,便于叠加作图;
特点 ⑵ 可在大范围内表示频率特性;
⑶ 利用实验数据容易确定 L(),进而确定G(s)。
17
频率特性 G(jw) 的表示方法
以 G(j) 1 为例。
Ts1sj
1. 幅相特性(Nyquist)
称为RC网络的幅频特性,后者称为相频特性。
⑤
1
jarc T tan 1
j 1 1 j T 1
e e 1 (T )2
1 j T
1 j T
完全地描述了网络在正弦输入电压作用下,稳态输
自动控制原理第五章习题及答案

第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。
u r R1u cR2CR2R1u r u c(a) (b)题5-1图R-C网络解(a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(RRCRRTCRRRRKsTsKsCRsCRRRsUsUrcττωωτωωωωω11121212121)1()()()(jTjKCRRjRRCRRjRjUjUjGrca++=+++==(b)依图:⎩⎨⎧+==++=+++=CRRTCRsTssCRRsCRsUsUrc)(1111)()(2122222212ττωωτωωωωω2221211)(11)()()(jTjCRRjCRjjUjUjGrcb++=+++==5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(tcs和稳态误差)(tes(1)tt r2sin)(=(2))452cos(2)30sin()(︒--︒+=ttt r题5-2图反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt ()..=-+≥--11808049试求系统频率特性。
自控原理第五章习题参考答案

5-1 5()0.251G s s =+5()0.251G j j ωω=+()A ω=()arctan(0.25)ϕωω=-输入 ()5cos(430)5sin(460) =4r t t t ω=-︒=+︒(4)A ==(4)arctan(0.25*4)45ϕ=-=-︒系统的稳态输出为()(4)*5cos[430(4)]3045)17.68cos(475)17.68sin(415)c t A t t t t ϕ=-︒+=-︒-︒=-︒=+︒ sin cos(90)cos(90)cos(270)αααα=︒-=-︒=+︒或者,()(4)*5sin[460(4)]6045) 17.68sin(415)c t A t t t ϕ=+︒+=+︒-︒=+︒所以,对于cos 信号输入下的稳态输出计算规律与sin 信号作用下计算相同。
5-3(2)1()(1)(12)G s s s =++ 1()(1)(12)G j j j ωωω=++()A ω=()arctan arctan 2ϕωωω=--起点:0ω= (0)1;(0)0A ϕ==︒ 位于正实轴上。
终点:ω→∞ ()0;()180A ϕ∞=∞=-︒+∆ 从第三象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()arctan arctan 290ϕωωω=--=-︒ arctan arctan 290ωω+=︒所以有,1/(2)ωω= 21/2ω=()0.473A ω=== 因此,与虚轴的交点为(0,-j0.47)()ω(3)1()(1)(12)G s s s s =++ 1()(1)(12)G j j j j ωωωω=++()A ω=()90arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)90A ϕ=∞=︒∆-- 位于负虚轴(左侧)无穷远方向终点:ω→∞ ()0;()270A ϕ∞=∞=-︒+∆ 从第二象限趋于原点因此,,Nyquist 曲线与实轴有交点,并且满足:()90arctan arctan 2180ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=2()0.673A ω===与实轴的交点为(-0.67,-j0))ω(4)21()(1)(12)G s s s s =++ 21()()(1)(12)G j j j j ωωωω=++()A ω=()180arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)180A ϕ=∞=︒∆-- 位于负实轴(上侧)无穷远方向终点:ω→∞ ()0;()360A ϕ∞=∞=-︒+∆ 从第一象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()180arctan arctan 2270ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=()0.94A ω===与虚轴的交点为(0,j0.94))ω=5-4(2)10.5ω=,21ω=,1K =,0ν=(3)10.5ω=,21ω=,1K =,1ν=低频段直线(延长线)与0db 线交点的频率为:1/cK νω'=。
自动控制原理第三版习题答案

《自动控制理论》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCsRCs s U s U 112+= (b)()()141112+⋅-=Cs RR R s U s U (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++=(b)()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K(2) 0,,==∞=a v p K K K K (3) 10,,KK K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 32220220222001200=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s= ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=-3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
自动控制原理及其应用课后习题第五章答案
ω
20 0 -20
10 ωc
1
2 -20dB/dec
ω
-60dB/dec
10 ≈1 ω2 0.5 c
ω c=4.5
5 ≈1 ω c=7.9 ω 0.01 c3
第五章习题课 (5-17)
-20
低频段曲线: 低频段曲线: 20lgK=20dB φ (ω ) 0 ω1=5 ω2=15 -90 相频特性曲线: 相频特性曲线: -180 -270 φ ( )= -90o ω ω=0 φ ( )= -270o ω ω=∞
-60dB/dec
ω
第五章习题课 (5-2)
10(s+0.2) 1.33(5s+1) (5) G(s)= s2(s+0.1)(s+15)=s2(10s+1)(0.67s+1) 解: 低频段曲线: 低频段曲线: 20lgK=2.5dB
第五章习题课 (5-7)
5-7 已知奈氏曲线,p为不稳定极点个数, 已知奈氏曲线, 为不稳定极点个数 为不稳定极点个数, υ为积分环节个数,试判别系统稳定性。 为积分环节个数,试判别系统稳定性。 Im υ=2 (b) p=0 (a) p=0 Im υ=0
ω=0 Re -1 0 ω=0+ -1 0 ω=0 Re
第五章习题课 (5-1)
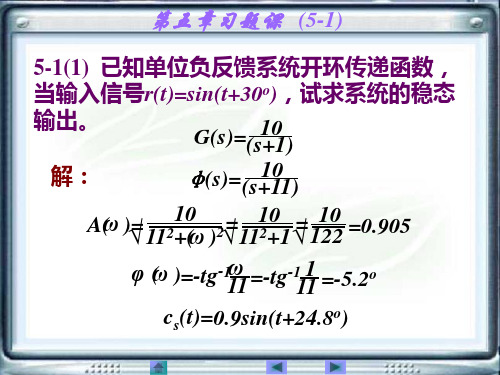
5-1(1) 已知单位负反馈系统开环传递函数, 已知单位负反馈系统开环传递函数, 当输入信号r(t)=sin(t+30o),试求系统的稳态 当输入信号 , 输出。 输出。 10 G(s)=(s+1) 10 解: φ(s)= (s+11) 10 = 10 = 10 ω A( )= 2 2 112+1√ 122 =0.905 √ 11 +( ) √ ω φ ( )=-tg-1ω =-tg-1 1 =-5.2o ω 11 11 cs(t)=0.9sin(t+24.8o)
自动控制理论 机械工业出版社 课后习题答案 夏德岑_第三版 PDF可打印
, t 0
比较上述两种情况, 可见有 z 1 零点时, 单位脉冲响应的振幅较无零点时小, 而且产生相移, 相移角为 arctg
1 2 n 。 1 n
2.单位阶跃响应 (a) 无零点时
ct 1
2 n t 1 2 t arctg 1 e sin n 1 2
G( s) 2a ss (2 a) s (2 2a)
2
根据条件(1) ,可得
Kv 1 2a 0.5 esr 2 2a
解得 a 1 ,于是由系统的开环传递函数为
G( s) 2 ss 3s 4
2
3-10
1M 2M
3t
s
p p
46.6%, t s 7.99s2%, ( n 2.12rad / s, 0.24) 16.3%, t s 8s2%, ( n 1rad / s, 0.5)
C m s 60 U a s s La Js 2 La f Ra J s Ra f C eC m 2
2-4
C s Rs
K A C m 60 iL a Js 3 iL a f Ra J s 2 i Ra f C eC m s K A C m 2
C 2 lim
s 0
d2 2(0.1s 2 s 10) 20(0.2s 1) 2 s lim 0 e s 0 ds 2 (0.1s 2 s 10) 3
(1)
s (t ) r (t ) R0 ,此时有 rs (t ) R0 , r r (t ) 0 ,于是稳态误差级数为 s esr t C0 rs (t ) 0 , t 0
《自动控制原理》第5章习题答案
G0 ( s ) =
1 s (0.1s + 1)
特征方程为, D( s ) = 0.1s 2 + s + 1 = 0 ,即,s + 10 s + 10 = 0 ,
2
ω n = 10 = 3.162 , ζ =
10 = 1.58 ,原系统为过阻尼系统, 2ω n
2
σ % = 0 , ts >
4
ζω n
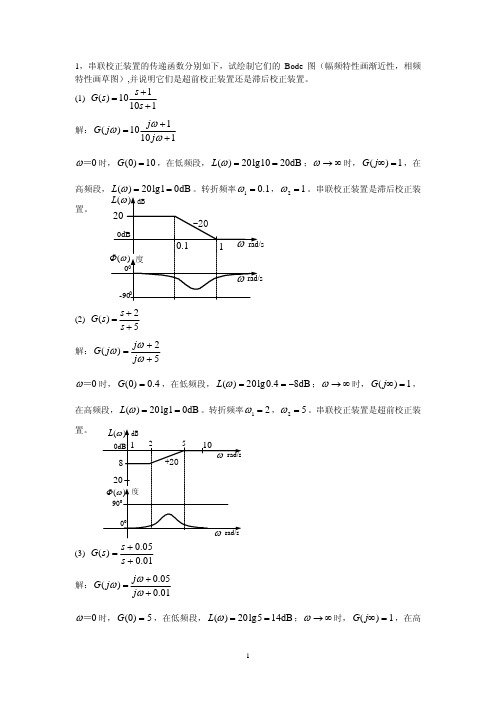
解: G ( jω ) =
ω=0 时, G (0) = 0.4 ,在低频段, L(ω ) = 20 lg 0.4 = −8dB ; ω → ∞ 时, G ( j∞) = 1 ,
在高频段, L(ω ) = 20 lg1 = 0dB 。转折频率 ω1 = 2 ,ω 2 = 5 。串联校正装置是超前校正装 置。
-j 3.46
②计算期望主导极点位置。 系统期望闭环主导极点具有阻尼系数 ζ =
2 ,自然振荡频率 ω n = 4 2 , 2
θ = arccosζ = arccos
2 = 450 , 则 一 个 具 有 期 望 极 点 的 2 阶 系 统 特 征 方 程 为 , 2
s 2 + 8s + 32 = 0
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
自动控制原理第三版习题答案

(b)有零点 时
比较上述两种情况,可见有 零点时,单位脉冲响应的振幅较无零点时小,而且产生相移,相移角为 。
2.单位阶跃响应
(a)无零点时
(b)有零点 时
加了 的零点之后,超调量 和超调时间 都小于没有零点的情况。
3-13系统中存在比例-积分环节 ,当误差信号 时,由于积分作用,该环节的输出保持不变,故系统输出继续增长,直到出现 时,比例-积分环节的输出才出现减小的趋势。因此,系统的响应必然存在超调现象。
该环节的伯德图如图A-5-11所示。
图A-5-11题5-4伯德图
(2)惯性环节 是最小相位的,其幅频、相频特性表达式为
该环节的伯德图如图A-5-11点划线所示。由图可见,两个环节具有相同的幅频特性,相频特性有根本区别。
5-7 (a) ,系统的相频特性曲线如图A-5-12所示。
图A-5-12题5-7 相频特性曲线
(2)采用比例-积分校正可使系统由I型转变为II 型。
(3)利用串联超前校正装置在剪切频率附近提供的相位超前角,可增大系统的相角裕度,从而改善系统的暂态性能。
(4)当 减小,相频特性 朝 方向变化且斜率较大时,加串联滞后校正可以提高系统的稳定程度。
(5)可根据扰动的性质,采用带有积分作用的串联校正,或采用复合校正。
图A-6-5题6-5系统校正后伯德图
6-7 ,超前校正装置 ,校正后系统的开环增益为 , 满足设计要求。
6-8
校正之前 ,取 处的 为新的剪切频率,该处增益为 ,故取 , 则 ,滞后校正装置传递函数为 ,校正后系统开环传递函数为
,
满足要求。系统校正前、后伯德图如图A-6-6所示。
图A-6-6题6-8系统校正前、后伯德图