2012高教社杯全国大学生数学建模竞赛D题全国一等奖论文设计
2012年高教杯数学建模竞赛获奖论文资料

葡萄酒的评价摘要:本文针对葡萄酒的评价问题建立了相应的统计模型。
问题一:借助SPSS软件,建立数值显著性分析模型和数值可信度分析模型。
首先,将每位评酒员对某种葡萄酒的分类指标打的分值求平均值并求和,即该种葡萄酒的质量,依此可得到每种葡萄酒的质量;其次,利用单因素分析法分别得到红葡萄酒组和白葡萄酒组的F值,用F检验法分别判断出两组评判结果针对红、白葡萄酒均存在显著性差异;再次,由方差分析法,分析出第二组的评判结果的可信度更高,故可将此组结果作为葡萄酒的质量。
问题二:在所有数值进行无量纲化处理的前提下,结合SPSS软件利用因子分析法构造出酿酒葡萄的综合理化指标函数,得到每种葡萄的综合理化指标,结合所酿葡萄酒的质量,进一步得到每种酿酒葡萄的综合得分。
根据每种酿酒葡萄的综合得分,利用极差分析法构造函数,划分等级范围,进而对葡萄分级。
问题三:由于酿酒葡萄和葡萄酒的量化指标数目的不同,为了更全面的考虑两者之间的联系,利用其综合理化指标分析两者之间的理化指标间的联系。
葡萄酒的综合理化指标与问题二中酿酒葡萄的综合理化指标处理方法一样。
根据相关性分析法,利用SPSS软件计算得到红葡萄与红葡萄酒的综合理化指标、白葡萄与白葡萄酒的综合理化指标均存在相关性。
针对问题四:基于问题二、三的结果,将酿酒葡萄和葡萄酒的理化指标用综合理化指标描述,将其看做自变量,将葡萄酒的质量看做因变量,结合SPSS软件对其进行线性回归分析,得到回归函数。
由于,一般认为评酒员对葡萄酒的评价结果就是葡萄酒的质量,因此利用该回归函数得到的葡萄酒的质量与评酒员打分所得中的葡萄酒质量比较发现差异较大,根据相关性系数和资料可得,葡萄酒的质量不仅仅与这两个因素有关,对其论证分析,发现酿酒葡萄和葡萄酒中的芳香类物质对专家打分有一定的影响,因此可基于芳香类物质对所得回归函数进行进一步完善,从而得到更优的葡萄酒质量评价模型。
关键词:单因素方差分析无量纲化处理因子分析法综合指标函数回归分析1.问题重述确定葡萄酒质量时一般是通过聘请一批有资质的评酒员进行品评。
2012数学建模竞赛A题国家一等奖论文
承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):兰州理工大学参赛队员(打印并签名) :1. 杨自升2. 韩向东3. 吴林峰指导教师或指导教师组负责人(打印并签名):汪训洋陈金淑日期:2012年9月10日赛区评阅编号(由赛区组委会评阅前进行编号):编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):葡萄酒的评价摘要评判葡萄酒质量时一般是通过聘请一批有资质的评酒员进行品评。
每个评酒员对葡萄酒样品进行品尝后对其分类指标打分,然后求和得到其总分,从而确定葡萄酒的质量。
酿酒葡萄的好坏与所酿葡萄酒的质量有直接的关系,葡萄酒和酿酒葡萄检测的理化指标会在一定程度上反映葡萄酒和葡萄的质量。
本文就葡萄酒质量的评价问题进行分析研究,针对如何对酿酒葡萄进行分级,酿酒葡萄与葡萄酒的理化指标之间的关系,以及酿酒葡萄与葡萄酒的理化指标对葡萄酒的质量的影响等问题,建立了相应的数学模型,并运用EXCEL、MATLAB等数学软件,分别就题目所提出的问题进行求解。
2012年“高教社杯”全国大学生数学建模竞赛(CUMCM)国家一等奖优秀论文C题目

基于逐步回归的脑卒中发病环境因素分析及干预模型摘要本文通过建立合理的假设,对某地区2009-2010年脑卒中发病率与8种气象因素进行了相关分析,并经多元逐步回归建立了脑卒中发病率的预报模型进行了定量分析,得到了较为合理的结论。
考虑到发病率与气象因素的复杂关系,在逐步线性回归模型的基础上,引进广义线性回归模型(GLM)进行推广。
针对问题一,本文对性别、年龄段、职业和时间序列以及4年的平均发病例数进行统计和分析,在删除了一些缺失或失真数据的基础上,对数据分别进行整理分析。
最后,在性别方面,得到脑卒中发病率男性比女性的高。
从年龄结构看,发病人数主要集中在50~90这一年龄区间内,其所占比例达81.10%。
从职业结构看,农民的发病率最大。
从各年的平均发病人数看,在各年季节交替月份的患病人数较多。
针对问题二,考虑到气温、气压和相对湿度对发病率的影响不确定,本文首先建立了Pearson相关分析模型,通过r值的大小来判断发病率与各指标是否存在着某种相关。
经计算得出温度与发病率呈正相关,气压、相对湿度与发病率呈负相关,且各指标与发病率均呈弱相关,相关度并不显著。
其次,考虑到发病率有可能受到多个因素的共同影响,于是用逐步线性回归模型对各因素逐步分析删除,最后得出脑卒中月平均发病率与平均气压、最大气压、最小气压、平均温度、最高温度和最高相对湿度这五个因素的一个多元回归线性预报模型,并进行了一定的定量分析。
最后,考虑到逐步线性回归模型的各指标是相互独立性,而气压和温度之间存在相互作用,通过引入平均气压和平均温度交互项,对模型二进行了改进,得到了一个更优的模型。
通过对模型的定量分析,本文预报模型具有实际应用价值。
针对问题三,脑卒中高危人群的重要特征有:偏瘫、失语、精神症状等,关键指标有:高血压、吸烟醉酒、血脂异常、糖尿病等。
结合问题一、二的结论,分别针对高危人群提出预警和干预的建议方案。
从这两个方案中得知:减少脑卒中发病率要从提高身体素质、疾病的认知和膳食均衡这三方面去考虑。
全国大学生数学建模大赛D题优秀论文(精)
会议筹备优化模型摘要能否成功举办一届全国性的大型会议,取决于会前的筹备工作是否到位。
本文为某会议筹备组,从经济、方便、满意度等方面,通过数学建模的方法制定了一个预订宾馆客房、租借会议室和租用客车的合理方案。
首先,通过对往届与会情况和本届住房信息有关数据的定量分析,预测到本届与会人数的均值是662人,波动范围在640至679之间。
拟预订各类客房475间。
其次,为便于管理、节省费用,所选宾馆应兼顾客房价位合适,宾馆数量少,距离近,租借的会议室集中等要素。
为此,依据附件4,借助EXCEL计算,得出7号宾馆为10个宾馆的中心。
然后,运用LINGO软件对选择宾馆和分配客房的0-1规划模型求解,得出分别在1、2、6、7、8号宾馆所预订的各类客房。
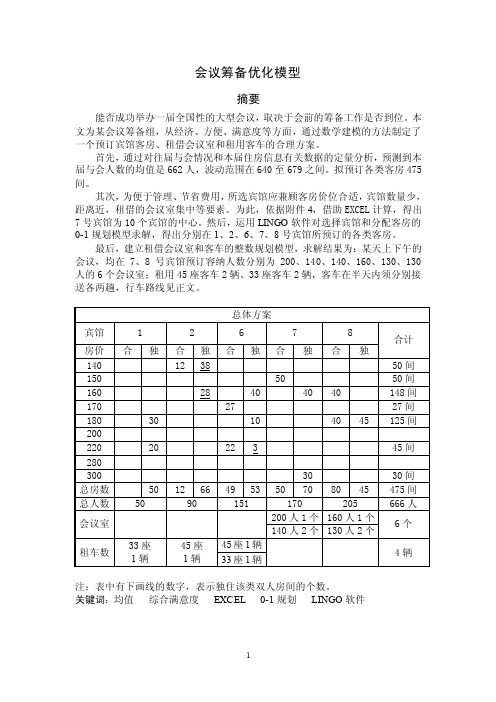
最后,建立租借会议室和客车的整数规划模型,求解结果为:某天上下午的会议,均在7、8号宾馆预订容纳人数分别为200、140、140、160、130、130人的6个会议室;租用45座客车2辆、33座客车2辆,客车在半天内须分别接送各两趟,行车路线见正文。
注:表中有下画线的数字,表示独住该类双人房间的个数。
关键词:均值综合满意度EXCEL 0-1规划LINGO软件1.问题的提出1.1基本情况某一会议服务公司负责承办某专业领域的一届全国性会议。
本着经济、方便和代表满意的原则,从备选10家宾馆中的地理位置、客房结构、会议室的规模(费用)等因素出发,同时,依据会议代表回执中的相关信息,初步确定代表总人数并预定宾馆和客房;会议期间在某一天上下午各安排6个分组会议,需合理分配和租借会议室;为保证代表按时参会,租用客车接送代表是必需的(现有45座、36座、33座三种类型的客车,租金分别是半天800元、700元和600元)。
1.2相关信息(见附录)附件1 10家备选宾馆的有关数据。
附件2 本届会议的代表回执中有关住房要求的信息(单位:人)。
附件3 以往几届会议代表回执和与会情况。
附件4 宾馆平面分布图。
2012年“高教社”杯全国大学生数学建模竞赛A题获奖论文
模型的建立和求解
问题一:初等模型 1)初步分析数据 根据附件 1 数据, 分别求出两组评酒员对本组内各葡萄酒样品评分的平均值, 作出表 1-1.本问题需要解决的问题是两组评酒员的评价结果有无显著差异以及 判断哪一组更可信,那么我们根据两组评酒员的评价总分,建立数学模型进行求 解。 表 1-1 两组葡萄酒样品的总分平均值 第一组红 R1 j 酒样品 1 酒样品 2 酒样品 3 酒样品 4 酒样品 5 酒样品 6 酒样品 7 酒样品 8 酒样品 9 酒样品 10 酒样品 11 酒样品 12 酒样品 13 酒样品 14 82 74.2 85.3 79.4 71 68.4 77.5 71.4 72.9 74.3 72.3 63.3 65.9 72
2012 高教社杯全国大学生数学建模竞赛
承
诺
书
我们仔细阅读了中国大学生数学建模竞赛的竞赛规则. 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮 件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问 题。 我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他 公开的资料(包括网上查到的资料) ,必须按照规定的参考文献的表述方式在正 文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反 竞赛规则的行为,我们将受到严肃处理。 我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行 公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表 等) 。
基本符号说明
Ri j :第 i 组第 j 号红葡萄酒样品的总分平均值;
wi j :第 i 组第 j 号白葡萄酒样品的总分平均值;
2 :第 i 组红葡萄酒样品的总分平均值的方差; Ri
2012年全国大学生数学建模大赛一等奖论文
葡萄酒的评价摘要随着人民生活水平的提高,葡萄酒开始走进千家万户,而葡萄酒的优劣评定也成了人们热议的话题。
葡萄酒的优劣评价一般通过聘请有经验的评酒员进行品评并做出评分。
本文围绕葡萄酒的评价问题进行研究分析。
针对问题一,首先我们对附录1数据进行整理分析。
先利用matlab编程对数据进行正态性检验,得出样本均满足正态分布这一条件之后进一步运用SPSS对数据进行配对样本T检验,检验得出的两组p值都小于标准0.05,判定两组品酒员的评价结果存在显著性差异。
接着,对所给评分数据进行方差分析,并进一步运用组间离均平方和方法比较第一、二组P值和F值的波动性,并最终得出结论:第二组评酒员所给的评分更为可信。
针对问题二,我们结合原问题附件中的数据,先采用因子分析方法提炼出对葡萄总体理化指标有显著影响的因子,分红葡萄和白葡萄两类之后采用聚类分析方法将葡萄分为五类。
在问题一的基础上,利用可信度高的品酒员所评分数作为葡萄酒质量的衡量标准,为五类葡萄划分好坏。
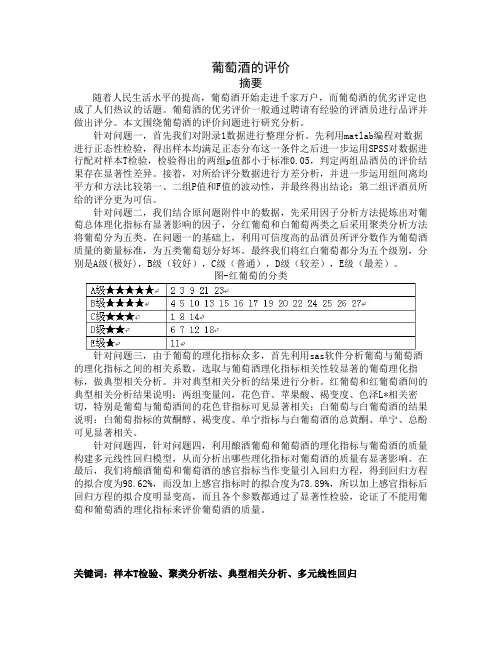
最终我们将红白葡萄都分为五个级别,分别是A级(极好),B级(较好),C级(普通),D级(较差),E级(最差)。
图-红葡萄的分类针对问题三,由于葡萄的理化指标众多,首先利用sas软件分析葡萄与葡萄酒的理化指标之间的相关系数,选取与葡萄酒理化指标相关性较显著的葡萄理化指标,做典型相关分析。
并对典型相关分析的结果进行分析。
红葡萄和红葡萄酒间的典型相关分析结果说明:两组变量间,花色苷、苹果酸、褐变度、色泽L*相关密切,特别是葡萄与葡萄酒间的花色苷指标可见显著相关;白葡萄与白葡萄酒的结果说明:白葡萄指标的黄酮醇、褐变度、单宁指标与白葡萄酒的总黄酮、单宁、总酚可见显著相关。
针对问题四,针对问题四,利用酿酒葡萄和葡萄酒的理化指标与葡萄酒的质量构建多元线性回归模型,从而分析出哪些理化指标对葡萄酒的质量有显著影响。
在最后,我们将酿酒葡萄和葡萄酒的感官指标当作变量引入回归方程,得到回归方程的拟合度为98.62%,而没加上感官指标时的拟合度为78.89%,所以加上感官指标后回归方程的拟合度明显变高,而且各个参数都通过了显著性检验,论证了不能用葡萄和葡萄酒的理化指标来评价葡萄酒的质量。
2012年“高教社杯”全国大学生数学建模竞赛(CUMCM)国家一等奖优秀论文D题

机器人避障问题摘要针对机器人避障问题,本文分别建立了机器人从区域中一点到达另一点的避障的最短路径、最短时间路径的非线性0-1整数规划模型。
同时,本文为求带有NP属性的非线性0-1整数规划模型,构建了有效启发式算法,利用MATLAB软件编程,求得了O→A、O→B、O→C、O→A→B→A→C的最短路径,同时得到了O→A的最短时间路径,求得的各类最短路径均是全局最优。
针对区域中一点到达另一点的避障的最短路径问题,首先,本文证明了圆弧位置设定在需要绕过障碍物的顶角上,且圆弧半径为10个单位时,能够使得机器人从区域中一点到达另一点的行进路径最短;其次,本文将最短路径选择问题转化成了最短路径的优选问题,根据避障条件,建立了具有较高普适性的避障最短路径的优化模型。
为便于求解,本文巧妙地将此优化模型转化成了以可行路径不与障碍物边界相交、不与圆弧相交为约束条件,以机器人从区域中一点达到另一点避障路径最短为目标的0-1规划模型;再次,本文构建了两种有效的启发式算法,利用MATLAB软件编程求得了O→A、O→B、O →C、O→A→B→A→C的最短路径,最短路径长分别为471.0372、853.7001、1088.1952、2725.1596,其中O-->A的最短路径为(0,0)→(70.5063,213.1405) →(75.975,219.1542)→(300,300),对应圆弧的圆心坐标为(80,210),O→B的最短路径,对应圆弧的圆心坐标:(60,300)、(150,435)、(220、470)、(220,530)、(150,600), O→C经过的圆心:(410,100)、(230,60)、(720,520),(720,600),(500,200), O→A→B→C→O经过的圆心:(410,100),(230,60), (80,210),(220,530),(150,600),(270,680),(370,680),(430,680),(670,730),(540,730),(720,520),(720,600),(500,200)。
2012年数学建模D题详解

2012年全国数学建模竞赛D题笔者解析以上四张图为第一问的解答,下面我在附亮相以上四个答案的各直线、圆弧端点的坐标值,看仔细了哦!!哈哈,我不是打酱油哦的,其实我是生产酱油滴,嘿嘿!再下来呢,再下来是第二问了,如果你还没有思路,一定要好好看看哦!!先说明一下,我只是从12个极限位置分析考虑,其实还至少两个极限位置给大家自己考虑,我给了十二个位置了,应该可有两个位置,但是有点累了,不想在弄了,那两个就留给你们自己捉摸吧。
不过我可以先说一下答案,答案就是:最短时间为:87.91892.如上图四张图片,以第一张图片为例,及0到A点之间的取舍。
首先大致的路径方案有两种,上线和下线。
我分别用粉红色和深蓝色表示。
通过查询信息可以知道,上线的路程要比下线的路程要近。
我选上线分析,当然这是折线路径。
看第四张图片。
第四张图片中,左边的是折线路径,右边的是支线+圆弧路径(我取的是其中的一种,不一定的最短的路径)。
假设从O点出发,起点坐标为(x,0),设一个路径的方程式,通过球的极限值的方式,计算得出x值的大小。
图片二和图片三中,我已分别给出了两种路径方案(折线路径),折线路径的确定,可以帮助确定直线路径的方向。
计算方法通上述说明。
2012年全国数学建模大赛D题第二问详解这一张是整体图,下面的图形,免得你们顺序弄的不对,给你们参考哦。
当然,这第二问,我只做了一半,也就是你们所看到的上线,即从障碍物5上面走的路线,从下面走的路线没有做,就留给你们自己做啦。
方法你们完全可以参照我做上线的方法。
当然,也许你们会问,为什么不用三段圆弧、四段圆弧,甚至更多段数。
我说,那不必了。
当你看到下面我的答案你会发现,一段圆弧的明显比两端圆弧的时间要短,那么三段四段呢,可想而知。
我也画过一个三段圆弧的,时间一百一十多,比两段圆弧的平均时间还要多,所以我就直接跳过不考虑了,但是你们在学论文说明时,可以简单的说明一下。
当然,这次坐标我没有弄,等你们选出哪个路径是耗时最短的,自己算一下就好了,反正也就是一个,几个点而已哈!还有一点哈,没个折点我都有用圆弧过渡的,你们可能的图片看不清楚的原因而误以为是折线,我没有用圆弧过渡,我不会犯这样错误。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括、电子、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): D我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):参赛队员(打印并签名) :1. (此部分容不便公开,见谅)2.3.指导教师或指导教师组负责人(打印并签名):日期: 2012 年 9 月 10 日赛区评阅编号(由赛区组委会评阅前进行编号):编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):机器人避障问题摘要针对机器人避障问题,本文分别建立了机器人从区域中一点到达另一点的避障的最短路径、最短时间路径的非线性0-1整数规划模型。
同时,本文为求带有NP属性的非线性0-1整数规划模型,构建了有效启发式算法,利用MATLAB软件编程,求得了O→A、O→B、O→C、O→A→B→A→C的最短路径,同时得到了O→A的最短时间路径,求得的各类最短路径均是全局最优。
针对区域中一点到达另一点的避障的最短路径问题,首先,本文证明了圆弧位置设定在需要绕过障碍物的顶角上,且圆弧半径为10个单位时,能够使得机器人从区域中一点到达另一点的行进路径最短;其次,本文将最短路径选择问题转化成了最短路径的优选问题,根据避障条件,建立了具有较高普适性的避障最短路径的优化模型。
为便于求解,本文巧妙地将此优化模型转化成了以可行路径不与障碍物边界相交、不与圆弧相交为约束条件,以机器人从区域中一点达到另一点避障路径最短为目标的0-1规划模型;再次,本文构建了两种有效的启发式算法,利用MATLAB软件编程求得了O→A、O→B、O →C、O→A→B→A→C的最短路径,最短路径长分别为471.0372、853.7001、1088.1952、2725.1596,其中O-->A的最短路径为(0,0)→(70.5063,213.1405) →(75.975,219.1542)→(300,300),对应圆弧的圆心坐标为(80,210),O→B的最短路径,对应圆弧的圆心坐标:(60,300)、(150,435)、(220、470)、(220,530)、(150,600), O→C经过的圆心:(410,100)、(230,60)、(720,520),(720,600),(500,200), O→A→B→C→O经过的圆心:(410,100),(230,60), (80,210),(220,530),(150,600),(270,680),(370,680),(430,680),(670,730),(540,730),(720,520),(720,600),(500,200)。
针对最短时间路径问题,我们建立了从o点出发到任意目标点的0-1非线性整数规划模型,同时针对题意要求,具体构建了从o点出发到A的最短时间路径的0-1非线性整数规划模型,利用LINGO软件求解,获得了机器人从o点出发,到达A的最短时间路径,求得最短时间路径下转弯半径为12.9885 ,同时最短时间路径时间长为94.2283个单位。
相应圆弧的圆心坐标为(82.1414,207.9153),两切点坐标分别为(69.8045,211.9779)、(77.7492,220.1387)。
本文确定路线思路循序渐进,先建立了有计算避障约束公式的普适性模型,再建立了以不取相交点来简化0-1变量取值关系的简化模型;给出了二种启发式算法,最短路径即最短时间路径具有一定可信度。
同时第一个启发算法可以求得全局最优解,第二个启发算法是针对问题的NP属性减少求解时间而构建的,两个算法都具有较重要的意义。
【关键词】机器人避障最短路径启发算法 0-1规划模型一、问题重述在一个800×800的平面场景图,在原点O(0, 0)点处有一个机器人,它只能在该平面场景围活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物,障碍物障碍物的距离至少超过10个单位)。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人转弯时,最大转弯速度为21.0100e 1)(ρρ-+==v v v ,其中ρ是转弯半径。
如果超过该速度,机器人将发生侧翻,无法完成行走。
请建立机器人从区域中一点到达另一点的避障最短路径和最短时间路径的数学模型。
对场景图中4个点O(0, 0),A(300, 300),B(100, 700),C(700, 640),具体计算:(1) 机器人从O(0, 0)出发,O→A 、O→B 、O→C 和O→A→B→C→O 的最短路径。
(2) 机器人从O (0, 0)出发,到达A 的最短时间路径。
注:要给出路径中每段直线段或圆弧的起点和终点坐标、圆弧的圆心坐标以及机器人行走的总距离和总时间。
二、问题分析2.1求取最短路径的分析本问题要求机器人从区域中一点到达另一点的避障最短路径。
机器人只要做到转弯时的圆弧半径最小为10个单位、与障碍物最近距离单时刻保持大于10个单位,那么可行走的路径就有无数条,若想求得机器人从区域中一点到达另一点的避障最短路径,则需要建立避障的最短路径模型,而建立避障的最短路径模型有一定难度。
根据对问题的分析,我们认为可以从简单做起,先确定小围最短路径条件,如圆弧位置的影响,圆弧半径的大小,避免与障碍物碰撞条件等,通过确定最短路径条件来建立避障的最短路径模型。
对于最短路径的求取,我们可以通过确定穷举原则,利用穷举法来求解,当然也可以通过构建启发式算法的进行求解。
2.2最短时间路径的分析对于要建立最短时间路径模型来说,我们容易知道影响的因素有直线行走速度、转弯速度,同时还需要考虑使得最短时间路径条件,如圆弧位置(坐标)的影响,圆弧半径的大小,避免与障碍物碰撞条件等。
对于直线行进,我们希望行进速度越大越好,对于机器人转弯时,转弯速度要有约束,要保证机器人不能发生侧翻。
我们发现圆弧半径的大小与转弯速度紧密相连,从转弯速度公式来分析,当转弯半径增大时,最大转弯速度也增大,为在更短时间行进到目标点,我们希望转弯速度为机器人的最大转弯速度较好,但有很大的可能是行进的路径不是最短的,即行进路径有很大可能在增加。
于是,我们需要做的工作是,在满足最短时间路径条件时,找到一个圆弧的坐标位置,同时确定半径的大小,以求得最短时间路径。
三、模型假设1.假设将机器人看成一个质点;2.假设半径不变时,机器人在行进、转弯过程中能一直保持最大的速度;3.假设启发算法是针对问题的NP属性减少求解时间而构建的。
四、符号说明五、最短路径模型建立与求解5.1模型准备5.1.1确定圆弧位置与转弯半径在建立机器人从区域中一点到达另一点的避障最短路径数学模型之前,我们需要考虑两个问题:问题一:机器人从区域中一点到达另一点过程中,若中间有障碍物,则需要通过转弯来绕过障碍物,那么,在转弯半径一定的情况下,怎样设定最佳圆弧位置,使得绕行路径最短?问题二:绕行路径是最短时,转弯半径的大小为多少?针对考虑的问题一,我们取机器人从O 到A 点的行走过程来说明问题。
在行走过程中要求机器人行走线路与障碍物的最短距离为10个单位,圆弧(转弯)半径最小为10个单位。
我们先令机器人转弯半径为10个单位,根据机器人行走过程中的要求,我们易得两条极端的行走路径,如图1。
将路线II 中圆弧3两切点线延长,两延长交路线I ,两交点处分别作半径为10个单位的圆弧,由此我们可得机器人从O 到A 点的行走时转弯中心坐标的围,如图2中四边形abcd 。
图1 两条极端路径 图2 转弯中心坐标的围 图1中路线I 是理想化路线,机器人不能沿800800⨯平面区域边界行走,800800⨯平面区域边界也可以看成是一个障碍物,且有要求机器人行走线路与障碍物的最短距离为10个单位,实际上作这样的处理并不会影响我们说明问题。
我们假设在平面中有),0(a A 和)0,(A O -两点,中间有一正方形的障碍物,将图2进行转化,如图3.图3 最短路径证明图 图3中,I C B ...,为切点,d c b a ,,,为圆弧圆心,四边形abcd 为圆弧中心点的围。
对于最佳圆弧位置确定,我们采用“覆盖法”。
我们容易知道,若路线II 与OA 构成的区域II 能够完整覆盖线I 与OA 构成的区域I ,即区域I 属于区域II ,那么区域II 的周长一定大于区域I ,否则。
图3中路线I 与OA 构成的区域I 周长为直线段CA OB +长度、圆弧BC 长、OA 长之和,区域I 周长1l 为OA BC CA OB l +++=1机器人沿路线I 的路径长1c 可表示为BC CA OB c ++=1路线II 与OA 构成的区域II 周长为直线段FA OH +长度、圆弧FG 长、OA 长之和,区域II 周长2l 为OA FG GA OF l +++=2机器人沿路线II 的路径长2c 可表示为FG GA OF c ++=2显然我们知道区域II 能够覆盖区域I ,即可得12l l >,进而可得到21c c <同理,在圆弧中心点的围任意取一点作为机器人转弯圆弧中点,并作路线i ,再将路线i 与路线I 做比较,可得到i c c <1由此,我们可得出结论:机器人从区域中一点到达另一点过程中,当圆弧位置设定障碍物顶角上时,绕行路径最短,此时圆弧中心点坐标为障碍物顶角坐标。
针对考虑的问题二,为了更清晰说明绕行路径是最短时,转弯半径的大小为多少,我们基于最小圆弧半径条件下使圆弧半径增大。
为了保证机器人与障碍物不发生碰撞,所以,需要保证大圆弧能够覆盖小圆弧对应圆的1/4圆弧。
在设定好最佳圆弧位置情况下,增加圆弧半径,比较最短路径的变化。
假设圆弧半径为R (10>R ),对应最短路线如图4。
(1) (2)图4 圆弧半径为R 最短路径图4(1)中B 为两圆弧公共切点,C 为小圆弧切点(10=r ),A 为大圆弧切点。