(整理)《结构力学习题集》5-力法.
力法习题
B
X1
X2
基本体系
h
B 1 A
B
X 2= 1
b
X 1= 1
M1图
A
b
M2图
h/l
1/l
(4)将系数和自由项代入力法方程,求得X1、X2。 (5)求弯矩
M M 1 X1 M 2 X 2
• 例:图(a)所示超静定梁,设支座A发生转角θ,求作 梁的弯矩图。已知梁的EI为常数。 • 【解】(1) 选取基本结构,原结构为一次超静定梁, • 选取图(b)所示悬臂梁为基本结构。 • (2) 建立力法方程 原结构在B处无竖向位移, • 可建立力法方程如下: • δ11X1+Δ1C=0
198
转回叠加弯矩图
例
利用对称性计算图示刚架,并作M图。
解:1)将荷载分组
2)正对称荷载作用下 d11=128/3EI D1P =-80/EI x1 = - D1P /d11 = 1.875 MBC = MBC` = 47.5 kNm (上侧受拉)
3) 反对称荷载下的计算: d22=704/3EI D2P =-2240/EI x2 = - D2P /d22 = 9.545 MBC =-1.82 kNm (上侧受拉) MBC` = 1.82 kNm (下侧受拉) MBA =-3.64 kNm (右侧受拉)
L
基本体系
M1 图
由M1图、MP图乘求 系数和自由项:
2 1 2 2 L3 11 ( L L L) EI 2 3 3EI
B
` CC
B `
A
A `
1P
5FP L3 2 1 FP L L 5 ( L) EI 2 2 2 计算杆端弯矩:
•
结构力学力法习题答案

结构力学力法习题答案结构力学力法习题答案结构力学是一门研究物体在受力作用下的变形和破坏规律的学科。
在学习结构力学的过程中,习题是必不可少的一部分。
通过解答习题,我们可以更好地理解和应用力学原理,提高解决实际问题的能力。
下面,我将为大家提供一些结构力学力法习题的详细解答,希望对大家的学习有所帮助。
习题一:一根悬臂梁的长度为L,截面为矩形,宽度为b,高度为h,材料的弹性模量为E。
在悬臂梁的自重和外力作用下,求悬臂梁的最大弯矩和最大挠度。
解答:首先,我们需要根据悬臂梁的几何形状和受力情况,绘制出受力图。
在这个问题中,悬臂梁受到自重和外力的作用,自重作用在悬臂梁的重心处,外力作用在悬臂梁的端点处。
根据受力图,我们可以得到悬臂梁在端点处的反力和弯矩分布。
接下来,我们可以根据结构力学的基本原理,利用力平衡和力矩平衡的方程,求解出悬臂梁的最大弯矩和最大挠度。
在这个问题中,我们可以利用弯矩-曲率关系,得到最大弯矩的表达式。
然后,我们可以利用悬臂梁的边界条件,求解出最大挠度的表达式。
习题二:一根悬臂梁的长度为L,截面为圆形,直径为d,材料的弹性模量为E。
在悬臂梁的自重和外力作用下,求悬臂梁的最大弯矩和最大挠度。
解答:与习题一类似,我们需要绘制出悬臂梁的受力图,根据受力图求解出悬臂梁的最大弯矩和最大挠度。
在这个问题中,悬臂梁的截面为圆形,因此我们需要利用圆形截面的惯性矩和弯矩-曲率关系,求解出最大弯矩的表达式。
习题三:一根梁的长度为L,截面为矩形,宽度为b,高度为h,材料的弹性模量为E。
梁的两端固定,受到均布载荷q的作用,求梁的最大弯矩和最大挠度。
解答:在这个问题中,梁的两端固定,因此我们需要考虑边界条件对梁的受力和变形的影响。
首先,我们需要绘制出梁的受力图,根据受力图求解出梁的最大弯矩。
然后,我们可以利用梁的边界条件,求解出最大挠度的表达式。
通过以上三个习题的解答,我们可以看到,在结构力学的学习中,我们需要灵活运用力学原理,结合具体的问题,综合考虑几何形状、材料性质和边界条件等因素,才能得到准确的解答。
结构力学力法练习共65页文档

61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
谢谢!
结构力学习题集

第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
aa9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A两侧截面的相对转角ϕA,EI = 常数。
ql l l/211、求图示静定梁D端的竖向位移∆DV。
EI = 常数,a = 2m 。
10kN/ma a a14、求图示刚架B端的竖向位移。
q15、求图示刚架结点C的转角和水平位移,EI = 常数。
q17、求图示刚架横梁中D点的竖向位移。
EI=常数。
21、求图示结构B点的竖向位移,EI = 常数。
l l23、求图示刚架C点的水平位移 CH,各杆EI = 常数。
4m4m3m2kN/m27、求图示桁架中D点的水平位移,各杆EA 相同。
aD30、求图示结构D点的竖向位移,杆AD的截面抗弯刚度为EI,杆BC的截面抗拉(压)刚度为EA。
a331、求图示结构D点的竖向位移,杆ACD的截面抗弯刚度为EI,杆BC抗拉刚度为EA 。
39、图示刚架杆件截面为矩形,截面厚度为h , h/l = 1/ 20 ,材料线膨胀系数为 α,求C 点的竖向位移。
CA-3-3+t+t ttl40、求图示结构B 点的水平位移。
结构力学第五章 力法
超静定结构与静定结构 在计算方面的主要区别
• 静定结构的内力只要根据静力平衡条件即 可求出,而不必考虑其它条件,即:内力是 静定的。 • 超静定结构的内力则不能单由静力平衡
条件求出,而必须同时考虑变形协调条件,即: 内力是超静定的。
求解超静定结构的计算方法
• • 从方法上讲基本有两种:力法和位移法。 从历史上讲分传统方法和现代方法。
M1 M1 M 12 l 3 (图形自乘) • EI dx EI dx 3EI 11
•
1P
4 M1MP ql dx EI 8EI
• 代入变形条件, 得: • X1= - ⊿1P/δ11= 3ql/8 (↑) • 最后弯矩图可用叠加原理(也可将X1作用在基
•⊿2P=[(ql2/2×l)×l] =ql4/2EI
(3)、解方程 (求解未知量)
• 力法方程:(可消去 l3/EI) • 4/3 X 1 -X 2 - 5ql/8 = 0 • -X1+4/3X2+ ql/2 = 0 • 解出: • X 1 =3ql/7 • X2 = - 3ql/56
1nXn+
… … nnXn+ ⊿nP = 0
• (n次超静定结构在荷载作用下的力法典型方程) • 基本未知量:n个多余未知力X1 、X2、… Xn; • 基本体系:从原结构中去掉相应的n个多余约 束后所得的静定结构; • 基本方程:n个多余约束处的n个变形条件。
力法典型方程的讨论:
• (1)、可写成矩阵形式: 11 12 1n X 1 1P 0 • 22 2 n X 2 2 P 0 21 n1 n 2 nn X N nP 0 • [δ ]{X} + {⊿P } = {0} • [δ ]——系数矩阵、柔度矩阵 • (2)、力法方程主系数: δ ii≠0,恒为正 . • 因为δ ii是Xi=1作用在自身方向上,所产 生的位移系数,所以不为零,恒为正。
结构力学习题集及答案

第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.M =1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M 17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q11、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l /32 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/l/2219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll21、求图示结构B点的竖向位移,EI = 常数。
ll22、图示结构充满水后,求A 、B 两点的相对水平位移。
结构力学第五章力法

12kN/m
EI
2
2 M1 基本体系
24
2EI
2EI
4m
MP
6 216
6
d11 =
D1 P =
1 6 6 2 6 1 1 2 2 2 2 224 2 = 2 EI 2 3 EI 2 EI 2 3 3EI
M
1 6 216 3 6 2 EI 3 4 1 2 24 3 2 984 1 = 4 EI EI 2 EI 3
(A)
由上述,力法计算步骤可归纳如下: 1)确定超静定次数,选取力法基本体系; 2)按照位移条件,列出力法典型方程; 3)画单位弯矩图、荷载弯矩图,用(A)式求系数和自由项; 4)解方程,求多余未知力; 5)叠加最后弯矩图。 M = M i X i M P
q=23kN/m
q=23kN/m
6m
=
撤除约束时需要注意的几个问题: (1)同一结构可用不同的方式撤除多余约束但其超静定次数相同。
(2)撤除一个支座约束用一个多余未知力代替, 撤除一个内部约束用一对作用力和反作用力代替。 (3)内外多余约束都要撤除。
(4)不要把原结构撤成几何可变或几何瞬变体系
4 5 1 2 外部一次,内部六次 撤除支杆1后体系成为瞬变 不能作为多余约束的是杆 1、2、 5 共七次超静定 1 3
力法基本体系的合理选择
1 1 2 1 1 1 21 aa qa2 21= 2a = d a = qa3 d12P = d 21 = D1d 11力法基本体系有多种选择,但必须是几何不变体系。同时应 == = ,22 D 2 P = 0 EI 3 3 624 EI EI EI2 28 32 3EI EI 尽量使较多的副系数、自由项为零或便于计算。所选基本体系应 含较多的基本部分,使Mi,MP尽可能分布局部。 qa 2 用力法解图示连续梁, 2kN/m ↓↓↓↓↓↓↓↓ 15 各跨EI=常数,跨度为a. 2kN/m ↓↓↓↓↓↓↓↓ 2kN/m 2a X1 qa 2 X2 d 11 = = d 22 ↓↓↓↓↓↓↓↓ 3EI 60 a d 12 = d 21 = X1=1 M1 6 EI qa3 D1P = , D2P = 0 1 24 EI X2=1 M 2
《结构力学习题集》5-力法
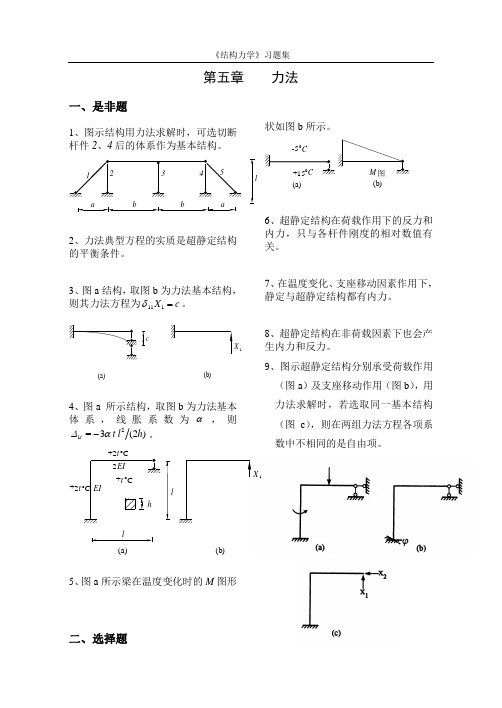
第五章 力法一、是非题1、图示结构用力法求解时,可选切断杆件2、4后的体系作为基本结构。
12345a b ab2、力法典型方程的实质是超静定结构的平衡条件。
3、图a结构,取图b 为力法基本结构,则其力法方程为δ111Xc =。
(a)(b)X 14、图a 所示结构,取图b为力法基本体系,线胀系数为α,则∆1= t t l h -322α()。
lo +2t 1X (a)(b)5、图a 所示梁在温度变化时的M 图形状如图b 所示。
(a)(b)0C 图 -50C +15M6、超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
7、在温度变化、支座移动因素作用下,静定与超静定结构都有内力。
8、超静定结构在非荷载因素下也会产生内力和反力。
9、图示超静定结构分别承受荷载作用(图a )及支座移动作用(图b ),用力法求解时,若选取同一基本结构(图c ),则在两组力法方程各项系数中不相同的是自由项。
二、选择题1、图a 所示结构 ,EI =常数 ,取图b 为力法基本体系,则下述结果中错误的是: A .δ230= ; B .δ310= ;C .∆20P = ;D .δ120= 。
()llll/2X (a)P (b)2、图示连续梁用力法求解时, 简便的基本结构是: A .拆去B 、C 两支座;B .将A 支座改为固定铰支座,拆去B 支座;C .将A 支座改为滑动支座,拆去B 支座;D .将A 支座改为固定铰支座 ,B 处改为完全铰。
()3、图示结构H B 为:A .P ;B .-P 2 ; C .P ; D .-P 。
()4、在力法方程δij j c i X ∑+=∆∆1中:A B.C. D .;;;.∆∆∆i i i =><000前三种答案都有可能。
()5、图示两刚架的EI 均为常数,并分别为EI = 1和EI = 10,这两刚架的内力关系为:()A .M 图相同;B .M 图不同;C .图a 刚架各截面弯矩大于图b 刚架各相应截面弯矩;D .图a 刚架各截面弯矩小于图b 刚架各相应截面弯矩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 力法三、填充题1、下列结构的超静定次数分别为(1),(2),(3),(4),(5),(6),(7)。
(1)、 (2)、(a )(b)(3)、 (4)、(5)、 (6)、(7)、(a)(b)2、力法方程等号左侧各项代表, 右侧代表。
3、图示结构,EI =常数,在给定荷载作用下,Q AB =_____________。
ll l4、图a结构中支座转动θ,力法基本结构如图b ,力法方程中∆1c = 。
lA(a)X 2(b)θ5、图a 所示结构,取图b 为力法基本体系,其力法方程为=∆+δP X 1111。
(a)(b)X 16、试绘出图示结构用力法计算时,未知量最少的基本结构。
l l112l四、计算题1、对于图示结构选取用力法求解时的两个基本结构,并画出基本未知量。
2、图示力法基本体系,求力法方程中的系数和自由项。
EI 是常数。
/2l /2l l q3、图示力法基本体系,求力法方程中的系数δ11和自由项∆1P 。
EI 是常数。
l /4/2/4l l4、图示为力法基本体系,求力法方程中的系数δ11和自由项∆1P 。
各杆EI 相同。
ll /2l /25、图示为力法基本体系,EI 为常数。
已知δ1114438==-l EI ql EI P /(),/() ∆。
试作原结构M 图。
ll l6、图示力法基本体系,X 1为基本末知量,各杆EI 相同,已知 δ1113256==-l EI ql EI P /,/() ∆。
试作原结构M 图。
l/2/27、已知图示基本体系对应的力法方程系数和自由项如下: δδ112232==l EI /(),δδ12210==, ∆14548P ql EI =-/(),∆2448P ql EI =/(),作最后M 图。
l l8、用力法计算并作图示结构M 图。
EI =常数。
a a9、用力法作图示排架的M 图。
已知 A = 0.2m 2,I = 0.05m 4,弹性模量为E 0。
q10、用力法作图示结构的M 图。
3mm11、用力法计算并作图示结构的M 图。
ql /212、用力法计算并作图示结构的M 图。
q3 m4 m13、用力法计算图示结构并作出M 图。
E I 常数。
(采用右图基本结构。
)l 2/3l /3/3l/314、用力法计算图示结构并作M 图。
EI =常数。
3m 3m15、用力法计算图示结构并作M 图。
EI =常数。
2m2m 2m2m16、用力法计算图示结构并作M 图。
EI =常数。
l lqll17、用力法计算并作图示结构M 图。
E I =常数。
18、用力法计算图示结构并作弯矩图。
161kNmmmm19、已知EI = 常数,用力法计算并作图示对称结构的M 图。
qllq20、用力法作图示结构的 M 图 。
EI = 常数。
q2ql21、用力法计算并作图示结构的M 图。
EI =常数。
a a22、用力法作M 图。
各杆EI 相同,杆长均为 l 。
23、用力法计算图示结构并作M 图。
EI = 常数。
4m2kN24mmm24、用力法计算并作出图示结构的M 图。
E = 常数。
25、用力法计算图示结构并作M 图。
EI =常数。
20kN3m 4m 3m26、用力法计算图示结构并作M 图。
EI =常数。
ll /2l /2l /2l /227、利用对称性简化图示结构,建立力法基本结构(画上基本未知量)。
E =常数。
ll28、试利用对称性简化图示结构,建立力法基本体系。
E =常数。
/2l /2l /2l /2l29、已知EA 、EI 均为常数,用力法计算并作图示结构M图。
ll30、求图示结构A 、D 两固定端的固端力矩,不考虑轴力、剪力的影响。
ll/231、选取图示结构的较简便的力法基本结构。
EI =常数。
6m 6m32、选择图示结构在图示荷载作用下,用力法计算时的最简便的基本结构。
P P33、用力法求图示桁架杆AC的轴力。
各杆EA相同。
aD34、用力法求图示桁架杆BC的轴力,各杆EA相同。
aD35、用力法计算图示桁架中杆件1、2、3、4的内力,各杆EA 常数。
d d d36、用力法求图示桁架DB杆的内力。
各杆EA相同。
4 m4 m4 m 4 m37、用力法作图示结构杆AB 的M 图。
各链杆抗拉刚度EA 1相同。
梁式杆抗弯刚度为EI EI a EA ,=21100,不计梁式杆轴向变形。
38、用力法计算并作出图示结构的M 图。
已知EI =常数,EA =常数。
a aaaa39、用力法计算并作图示结构M 图,其中各受弯杆EI=常数,各链杆EA EI l =()42。
40、图示结构支座A 转动θ,EI =常数,用力法计算并作M 图。
lAθ41、图a 所示结构EI =常数,取图b 为力法基本结构列出典型方程并求∆1c 和∆2c 。
lc(a)c(b)42、用力法计算图示超静定梁并作M 图。
E =常数。
l /2=1I 2ϕI l /243、用力法计算并作图示结构由支座移动引起的M 图。
EI =常数。
lll44、用力法计算并作图示结构由支座移动引起的M 图。
EI =常数。
l /245、用力法作图示结构的M 图。
EI =常数,截面高度h 均为1m ,t = 20℃,+t 为温度升高,-t为温度降低,线膨胀系数为α。
6m-t +t-t46、用力法计算图示结构由于温度改变引起的M 图。
杆件截面为矩形,高为h ,线膨胀系数为α。
l EI+10-10C C47、用力法计算并作图示结构的M 图,已知:α=0.00001及各杆矩形截面高h EI ==⨯⋅0321052.,m kN m 。
6m+10EI+30+10CCCEI48、图示连续梁,线膨胀系数为α,矩形截面高度为h ,在图示温度变化时,求M B 的值。
EI 为常数。
lCCl-10+20BC -1049、已知EI =常数,用力法计算,并求解图示结构由于AB 杆的制造误差(短∆)所产生的M 图。
aa/2/2ABEA=o o50、用力法作图示梁的M 图。
EI =常数,已知B 支座的弹簧刚度为k 。
B Al1k=EI/l351、用力法计算并作图示结构M 图。
E I =常数,K EI l ϕ=。
52、图示等截面梁AB ,当支座A 转动θA ,求梁的中点挠度f C 。
l θCEIBAf C/2l /2A53、求图示单跨梁截面C 的竖向位移∆C V 。
l l /2/254、图示结构承受均布荷载q ,且支座C 下沉∆=ql EI 424/,各杆EI 相同,求D 点竖向位移∆DV 。
l /2l /2lq55、图b 为图a 所示结构的M 图,求B 点的竖向位移。
EI 为常数。
qlql 23ql 26ql 28(a) (b) M 图56、求图示结构中支座E 的反力R E ,弹性支座A 的转动刚度为k。
ll l二、选择题1、图a 所示结构 ,EI =常数 ,取图b 为力法基本体系,则下述结果中错误的是:A .δ230= ;B .δ310= ;C .∆20P = ;D .δ120= 。
()llll/2(a)P (b)2、图示连续梁用力法求解时, 简便的基本结构是: A .拆去B 、C 两支座;B .将A 支座改为固定铰支座,拆去B 支座;C .将A 支座改为滑动支座,拆去B 支座;D .将A 支座改为固定铰支座 ,B 处改为完全铰。
()3、图示结构H B 为:A .P ;B .-P 2 ; C .P ; D .-P 。
()4、在力法方程δij j c i X ∑+=∆∆1中:A B.C. D .;;;.∆∆∆i i i =><000前三种答案都有可能。
()5、图示两刚架的EI 均为常数,并分别为EI = 1和EI = 10,这两刚架的内力关系为:() A .M 图相同; B .M 图不同;C .图a 刚架各截面弯矩大于图b 刚架各相应截面弯矩;D .图a 刚架各截面弯矩小于图b 刚架各相应截面弯矩。
/2/2/2(a)ll /2/2/2(b)l l57、已知荷载作用下桁架各杆的内力如图所示,试求结点D 的水平位移。
EA =常数。
6 m -()N P ⨯58、图示两跨连续梁在荷载作用下的弯矩图已作出如图所示,试求B 与C 两截面的相对角位移。
EI =常数。
图M 252ql 22ql 52ql 一、是非题1、图示结构用力法求解时,可选切断杆件2、4后的体系作为基本结构。
12345a b ab2、力法典型方程的实质是超静定结构的平衡条件。
3、图a 结构,取图b 为力法基本结构,则其力法方程为δ111X c =。
(a)(b)X14、图a 所示结构,取图b 为力法基本体系,线胀系数为α,则∆1= t t l h -322α()。
lo +2t1X (a)(b)5、图a 所示梁在温度变化时的M 图形状如图b 所示。
(a)(b)0C 图 -50C +15M6、超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
7、在温度变化、支座移动因素作用下,静定与超静定结构都有内力。
8、图示结构中,梁AB 的截面EI 为常数,各链杆的E A 1相同,当EI 增大时,则梁截面D 弯矩代数值M D 增大。
9、图示对称桁架,各杆EA l ,相同,N P AB =。
59、图b 为图a 所示结构的M 图,求荷载作用点的相对水平位移。
EI 为常数。
l/2/2Pl /4Pl /16Pl /16Pl /16Pl /16M 图(a) (b)。