宽动态摄像机的优缺点分析
2023年DPS宽动态监控摄像机技术介绍及应用分析
DPS宽动态监控摄像机技术介绍及应用分析随着安防行业的不断进展,摄像机的各项技术得到不同程度的突破,从而得到了多种更新换代的产品。
从最初的黑白摄像机到现在广泛使用的彩色摄像机,从最初的单一种类摄像机进展到现在多品种、多功能摄像机,从最初的低线摄像机到现在的超高清楚度摄像机,摄像机技术不断进展,使得用户可依据实际环境与不同需求来选择摄像机。
随着用户对摄像机图像效果要求的不断提高,在明暗反差过大的场景中,如大厅、门口等光线差别比较大的场所,传统摄像机只能依靠背光补偿(BLC)功能来处理。
当背光补偿功能打开的时候,背景图像会消失曝光过足,图像发白、失真;当背光补偿功能关闭的时候,前景图像由于曝光不足而成为黑色。
很多摄像机生产厂家为了解决这些问题,相应地对背光补偿(BLC)采纳了一些增加技术,但也仅是对局部图像进行处理,无法得到抱负的全局图像。
因此必需有一种具有新技术的摄像机,来满意逆光环境下对摄像机的要求。
宽动态技术摄像机应运而生,渐渐成为各大摄像机生产厂商关注的焦点。
宽动态摄像机介绍根据度值来衡量,当摄像机从室内看窗外,室内照度为100Lux,而外面的照度可能是在10,000Lux,对比就是10,000/100=100:1。
在这种对比下人眼能很简单的同时看清室内和室外的物体,由于人眼能处理1000:1的对比度。
然而传统CCD摄像机就会有很大的问题。
由于传统摄像机只有3:1的对比性能。
安装现场简单的光线环境,导致只能看到监控目标的轮廓,同时会消失画面被破坏、缺乏颜色层次等问题。
当使用最慢为1/50秒的电子快门来取得室内较暗处目标的正确曝光,但在这种状况下室外光明处的图像由于过度曝光会变白(过亮);当选择最快1/6000秒取得室外光明处影像的完善的曝光,但是室内较暗处的影像会由于欠曝光而变黑(过暗)。
这是一个自从监控摄像机被创造以来就始终长期困扰使用者的问题。
宽动态摄像机技术是在特别剧烈的对比下让摄像机看到物体图像而运用的一种技术。
2023年DPS宽动态监控摄像机技术介绍及应用分析报告模板

DPS摄像机优势:高清晰度、宽动态、低噪声、易于集成
DPS宽动态监控摄像机采用了低噪声图像传感器,能够在低照度环境下进行高清晰度拍摄,并且具有较低的噪点和干扰。 这种技术可以减少图像中的噪点和干扰,提高监控的准确性和可靠性。
3.DPS宽动态监控摄像机具备多个特点,包括低照度性能、 高清画质、快速反应能力等
除了这些优势,DPS宽动态监控摄像机还具有低照度性能、高清画质、快速反应能力等多个特点。它的低照度性能 可以在低光环境下拍摄出清晰、细腻的图像,高清画质则可以让图像更加细腻、真实,快速反应能力则可以快速响 应图像的变化。
DPS宽动态监控摄像机可以与其他监控系统进行集成,并且具有开放的接口和协议,可以方便地与其他系统进行数据交 换和共享。这种技术可以降低系统集成成本,提高系统的可靠性和稳定性。
综上所述,DPS宽动态监控摄像机具有高清晰度、宽动态性能、低噪声性能和易于集成等优势,可以广泛应用于安防、 交通、金融、医疗等领域。
DPS摄像机低照度性能强,宽动态范围大,高清 晰度显著
DPS宽动态监控摄像机的低照度性能达到了1.0 Lux,即使是在微弱的光线下,也能捕捉到清晰的图 像。这种性能在夜间监控或光线不足的环境中非常有用。
DPS宽动态监控摄像机的宽动态范围达到了100%,相比传统摄像机,可以更好地处理光线对比度 极高的场景,如日落或大光比环境。这种性能使得摄像机在处理复杂的光线环境下,仍能保持图像 的色彩和对比度。
2.DPS摄像机优势:宽动态和图像处理能力、自动适应环 境、清晰细腻、抑制噪点和伪影
wdrc宽动态范围压缩算法
wdrc宽动态范围压缩算法(最新版)目录1.WDRC 宽动态范围压缩算法的概述2.WDRC 的工作原理3.WDRC 的优势与应用4.WDRC 的局限性与未来发展方向正文【1.WDRC 宽动态范围压缩算法的概述】WDRC(Wide Dynamic Range Compression)宽动态范围压缩算法,是一种针对高动态范围场景的图像处理技术。
在实际应用中,由于光线条件的差异,会导致图像中某些区域过曝或过暗,严重影响画面的整体观感。
WDRC 算法应运而生,其主要目的是通过压缩高动态范围场景的亮度差,提高图像的观感质量。
【2.WDRC 的工作原理】WDRC 算法的工作原理可以概括为以下几个步骤:(1) 动态范围扩展:通过提高暗部区域的亮度,降低过曝区域的亮度,扩展图像的动态范围。
(2) 压缩:对扩展后的动态范围进行压缩,使之适应显示设备的动态范围。
(3) 融合:将压缩后的各个区域进行融合,生成最终的宽动态范围压缩图像。
【3.WDRC 的优势与应用】WDRC 算法具有以下优势:(1) 提高图像观感质量:通过压缩高动态范围场景的亮度差,使图像整体更加协调。
(2) 适用于多种场景:无论是室内还是室外,静态还是动态场景,WDRC 算法都能有效地处理高动态范围问题。
(3) 算法简单:相较于其他高动态范围处理算法,WDRC 算法结构简单,计算量较小。
WDRC 算法广泛应用于监控、摄影、显示等领域,如智能安防监控系统、智能手机摄像头、高清电视等领域。
【4.WDRC 的局限性与未来发展方向】尽管 WDRC 算法具有很多优势,但仍存在一定的局限性:(1) 压缩效果受限:WDRC 算法对高动态范围场景的压缩效果有一定的局限性,不能完全消除过曝和过暗区域。
(2) 算法通用性:WDRC 算法对不同场景的适应性有待提高,可能需要针对特定场景进行优化。
摄像机宽动态
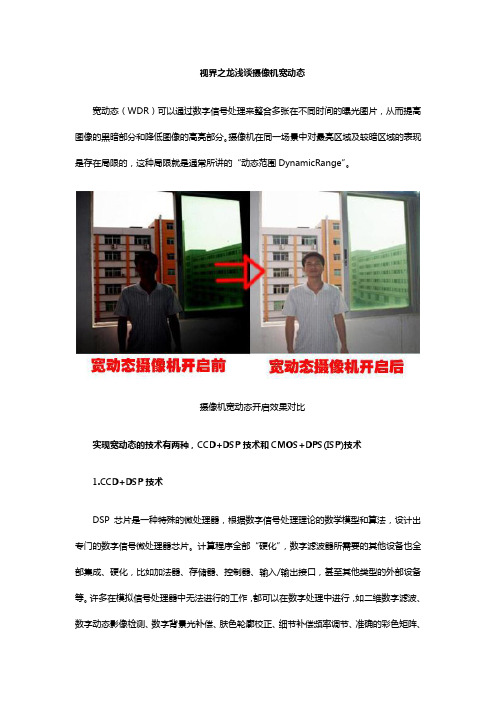
视界之龙浅谈摄像机宽动态宽动态(WDR)可以通过数字信号处理来整合多张在不同时间的曝光图片,从而提高图像的黑暗部分和降低图像的高亮部分。
摄像机在同一场景中对最亮区域及较暗区域的表现是存在局限的,这种局限就是通常所讲的“动态范围DynamicRange”。
摄像机宽动态开启效果对比实现宽动态的技术有两种,CCD+DSP技术和CMOS+DPS(ISP)技术D+DSP技术DSP芯片是一种特殊的微处理器,根据数字信号处理理论的数学模型和算法,设计出专门的数字信号微处理器芯片。
计算程序全部“硬化”,数字滤波器所需要的其他设备也全部集成、硬化,比如加法器、存储器、控制器、输入/输出接口,甚至其他类型的外部设备等。
许多在模拟信号处理器中无法进行的工作,都可以在数字处理中进行,如二维数字滤波、数字动态影像检测、数字背景光补偿、肤色轮廓校正、细节补偿频率调节、准确的彩色矩阵、精确的校正、自动聚焦等。
超级宽动态技术常使用双速CCD配合DSP的处理方式。
这种双曝光(或双快门)技术的核心是针对明暗反差较大的场景,摄影机先对明亮区域进行一次快速曝光,得到一幅亮部区域清晰正常的影像并存储到数据缓冲存储器中;然后再对场景中暗部区域进行一次慢速曝光,得到一幅暗部区域画面清晰的影像也存储到数据缓冲存储器中。
以上曝光完毕后,利用DSP特有的图像处理合并运算法,将两幅影像当中亮度适当的部分分别切割下来,最后进行叠加合成并输出一幅明暗区域都清晰可见的影像。
这样就能避免亮部曝光过度和暗部曝光不足的问题,从而使整个画面明区与暗区都清晰可见,以实现宽动态的处理效果。
但如果采用不同品牌型式的DSP芯片,在具体细节上就会有明显差别,比如对灵敏度、色还原度、白平衡等的处理。
2.CMOS+DPS(ISP)技术美国Pixim公司在斯坦福大学20世纪90年代技术发展基础上研发了一种基于CMOS 技术的新型的影像撷取系统——DPS(ISP数字像素处理系统),此系统可以通过其超强的宽动态功能来获得高质量的图片。
监控DNA 宽动态与强光抑制摄像机大不同

监控DNA 宽动态与强光抑制摄像机大不同
在生物遗传领域中,DNA不同的排列顺序会导致不同的生物体出现。
简单地说,DNA就是遗传信息载体。
在安防监控领域中,应对不同的环境则采用不同的监控技术;宽动态与强光抑制摄像机看似一样,但各自又有不同应用特性,或许”监控DNA”能够说明二者之前的联系与不同。
如果说由于外部环境光变而引发的监控技术,那么这个监控技术就是该DNA的主体,宽动态与强光抑制技术则是这DNA的两条螺旋体;在为同一种环境监控而存活,同时这”双螺旋结构”也并不完全相同。
宽动态与强光抑制应用原理的区别
既然二者是两种不同的结构,那么我们就来看一看他们的区别点到底在哪里?首先,一起来看一下二者的应用原理的区别。
特殊环境下无法看清监控物细节
宽动态技术是在光线环境还算理想的情况下,无法获取目标物体的细节。
也就是说,宽动态技术大多应用在明暗交替的地方,当监控摄像机还无法达到低照度监控时,需采用宽动态技术进行”补光”。
在监控摄像机应用上来说,普
通摄像机监控获取的是背景清晰但是前景较暗的低照度强光抑制看清监控主体一句话点评:宽动态监控摄像机是在光线非极端恶劣的情况下,遇到明暗交替时采用的一种”补光”技术;是无法获取监控物体的细节而采用的一种技术。
低照度强光抑制看清监控主体
与宽动态技术不同的是,强光抑制应用环境相对恶劣。
在大多数情况下,低照度环境采用强光抑制,在”淡化”背景光的同时,将被测主体物突出出来,。
每天都提的宽动态,都知道是什么吗?

每天都提的宽动态,都知道是什么吗?光学人生,精彩人生宽动态是我们常提的一个概念,拿到一款摄像机,会问这款更摄像机的宽动态效果怎样。
但是究竟什么是宽动态,宽动态是怎样实现的?哪些场景会应用到宽动态摄像机呢?今天就带大家全面了解一下宽动态摄像机宽动态技术是指图像在同一时间曝光两次,一次快,一次慢,再进行合成使得能够同时看清画面上亮与暗的物体。
宽动态技术和背光补偿技术都是为了克服在强背光环境条件下,看清目标而采取的措施,但背光补偿是以牺牲画面的对比度为代价的!所以,从某种意义上说,宽动态技术是背光补偿的升级版。
宽动态的实现方式CMOS+DPS技术:DPS采用的是每一个像素单独曝光和控制技术,加之利用CMOS 传感器采集的多帧画面合成一幅完整图像的线性叠加,相比于CCD的两次曝光成像有了更高的动态范围。
从数值上来说,采用DPS技术的CMOS摄像机就目前的处理技术,其动态范围即可到达120dB。
在扩大动态范围的同时,DPS也解决了CCD传感器在处理动态范围和色彩真实性上的不足,其色彩还原性更加真实,能够满足应用的要求。
使用这种技术的摄像机在数字图像传感器里每一个像素中都使用了一个模拟数字转换器(ADC),在捕捉到光信号时直接转化为数字信号,最大程度地降低了信号在排列中的衰减和干扰。
目前通用监控网络摄像机大多采用CMOS+DPS宽动态技术,应用场景比较广泛,包括金融、教育、交通等多个领域。
宽动态已经成为高清摄像机必不可少的一项功能,市场需求非常旺盛。
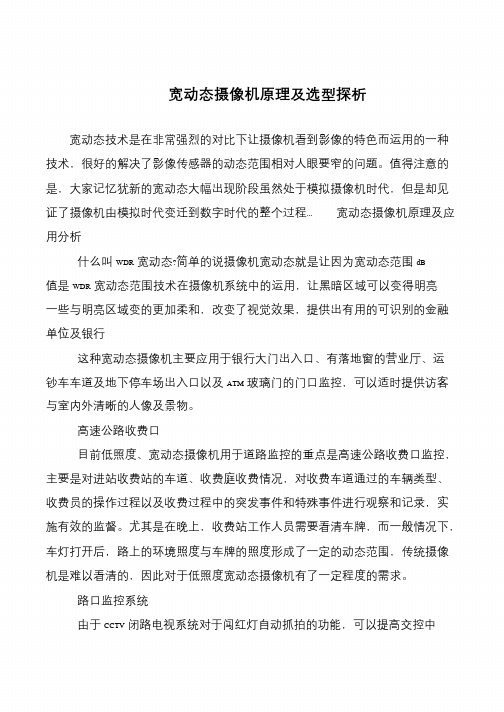
强光环境宽动态关强光环境宽动态开宽动态摄像机的主要应用领域高速公路收费系统:目前低照度、宽动态摄像机用于道路监控的重点是高速公路收费监控系统主要是对收费站的车道、收费广场、收费亭的收费情况,对收费车道通过的车辆类型、收费员的操作过程以及收费过程中的突发事件和特殊事件进行观察和记录,实施有效的监督。
尤其是在晚上,收费站工作人员需要看清车牌,而一般情况下,车灯打开后,路上的环境照度与车牌的照度形成了一定的动态范围,传统摄像机难以“看清”,而低照度、宽动态摄像机派上了大用场。
宽动态摄像机原理及选型探析
宽动态摄像机原理及选型探析
宽动态技术是在非常强烈的对比下让摄像机看到影像的特色而运用的一种技术,很好的解决了影像传感器的动态范围相对人眼要窄的问题。
值得注意的是,大家记忆犹新的宽动态大幅出现阶段虽然处于模拟摄像机时代,但是却见证了摄像机由模拟时代变迁到数字时代的整个过程...宽动态摄像机原理及应用分析
什么叫WDR宽动态?简单的说摄像机宽动态就是让因为宽动态范围dB 值是WDR宽动态范围技术在摄像机系统中的运用,让黑暗区域可以变得明亮一些与明亮区域变的更加柔和,改变了视觉效果,提供出有用的可识别的金融单位及银行
这种宽动态摄像机主要应用于银行大门出入口、有落地窗的营业厅、运钞车车道及地下停车场出入口以及ATM玻璃门的门口监控,可以适时提供访客与室内外清晰的人像及景物。
高速公路收费口
目前低照度、宽动态摄像机用于道路监控的重点是高速公路收费口监控,主要是对进站收费站的车道、收费庭收费情况,对收费车道通过的车辆类型、收费员的操作过程以及收费过程中的突发事件和特殊事件进行观察和记录,实施有效的监督。
尤其是在晚上,收费站工作人员需要看清车牌,而一般情况下,车灯打开后,路上的环境照度与车牌的照度形成了一定的动态范围,传统摄像机是难以看清的,因此对于低照度宽动态摄像机有了一定程度的需求。
路口监控系统
由于CCTV闭路电视系统对于闯红灯自动抓拍的功能,可以提高交控中。
几种宽动态的优缺点

PIXIM方案优点:1.动态范围宽缺点:1.照度差(特别是晚上),如果是红外机,在大环境下,图像也看不清楚。
2.色滚比较大SS3方案优点:1.照度比PIXIM低,而且是SONY方案,别人都比较信赖。
缺点: 1.背光大的情况下,清晰度不好,有重影现象,而且有轻微偏色。
NEXTCHIP方案优点:1.照度低2.菜单功能多,包括全部摄像机功能(三星摄像机在内),有帧累积,强光抑制等多种功能。
3.电流小,功耗小,稳定性好4.价格比较实惠。
缺点:动态范围比PIXIM小。
LG803OSD菜单;WDR,HSBLC;多国语言;多段电子快门SAMSUNG SDB-70SV-4 DSP;OSD菜单;SSNR(内置);快门选择;感光度选择;隐私保护;多国语言;带宽动态,强光抑制优点:照度低,高度快门缺点:有色偏SAMSUNG SDB-50W-V DSP;OSD菜单;2D-3D降噪;强光抑制;SSNR(内置);多段快门选择;感光度选择;隐私保护;24国语言;Gama值调整;区域背光补偿(超级宽动态);缺点:非真正的WDR。
SONY(代表:, SC-6508A)ICX213BK 宽动态CCD & XD1 DSPOriginal imported SONY 1 / 3" Dual CCD camera module, 600TVL 0.2LUX at F1.2(15IRE/6500ºK/sens up off) 0.0006LUX at F1.2(15IRE/6500ºK/sens up on),motion detection,privacy mask,160 times wide dynamic, non-ghosting, no color-scrolling, suitable for low-illumination with high-resolution,and also take into account of the dynamic super WDR (for banks, government city surveillance),a powerful15-language full-function OSD,external synchronization, AC24V/DC12V松下(JXJ RMB800) –代表:PANASONIC WV-CP480SDIII -- Super Dynamic IIIWV-CP480: Resolution: 1/3" Double Speed CCD Color Image Sensor, 540 line horizontal (color mode) / 570 lines horizontal (B/W mode). Panasonic introduces the WV-CP480 Super Dynamic III camera, equipped with Auto Back Focus (ABF). When these cameras switch from colour to B/W mode, the Cameras automatically make micron-order adjustments in CCD position to achieve precise back focus. The new Auto Back Focus (ABF) technology ensures delivery of clear, sharp, perfectly focused images 24-hours a day automatically. The new Pixel Based 160x Dynamic Range Correction adjusts automatically to moment-to-moment changes in contrast making it possible to view subjects accurately in all areas and positions, thanks to area free natural contrast image correction.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
宽动态摄像机的优缺点分析宽动态范围摄像机正迅速成为视频监控的主流。
然而,对于宽动态范围(WDR)的确切概念仍然存在许多讹传和误解。
本文将从动态范围的含义及其如何影响图像质量的角度,讨论了宽动态摄像机的优点和局限性。
什么是动态范围根据标准定义,动态范围是指变量(如光或声音)的最大值和最小值的比值。
在理解和应用动态范围这一概念方面存在的核心困难在于如何进行测量。
设想这样一个任务:用一个桶测量降雨量。
下大雨时,桶中的水很快就会溢出,这样便无法确定降雨量的最大值:测量结果会根据桶的容量进行修剪。
下小雨时,在一个测量间隔内,桶内可能只滴入一滴雨,在另一个测量间隔内,可能只滴入两滴雨,最小值无法确定或受噪波干扰。
要增加小值读数的精度,就需要增加集时间,但这种做法对于大值并不适用,会导致溢出。
这个简单的例子说明测量结果实际上就是信息通道:它可以传递、丢失或误报关于变量的信息——到达上限、到达下限或同时到达两端。
设想将视频摄像机用作测量仪器。
它可测量照射在其数百万个光敏元件(即像素阵列)中每个元件上以二维阵列排列的光量。
每个像素阵列对一段时间内接收的光子流进行积分运算,然后将其转化为可读取的电子信号。
如果来自某场景的光子流很强,或者如果积分时间很长,信号可能会达到限制而饱和(修剪)。
结果导致与场景明亮区域的细部相对应所有的亮度变化会丢失。
同样,如果场景的光子流很弱,或者如果积分时间很短,信号会产生不确定、带噪波的读数,场景的所有细部都会丢失。
与任何信息渠道一样,视频摄像机的质量可通过其传达信息(即展示场景的亮度变化)的优越程度来判断。
尤其是,摄像机是否能够不作修剪即可捕捉场景明亮处的细微变化?是否能够捕捉背光处的细微变化而不任其淹没在噪波中?同时在动态范围的两端捕捉场景细部的功能如何?这些问题的答案,既取决于场景自身的动态范围,也取决于如何对作为测量仪器的摄像机的动态范围功能进行比较。
通常,如果场景的动态范围与摄像机相同或比摄像机窄,产生的图像会忠实地传达场景背光处和明亮处的细部,不会有噪波,也不修剪。
如果场景的动态范围较宽,摄像机会因噪波过大而修剪明亮处的细部,或屏蔽背光处的细部,也可能会同时修剪这两个部位。
如何不受摄像机自身功能的影响,对场景的动态范围进行单独评估呢?这可通过不同曝光时间的多个场景捕捉图像分段进行。
超长曝光可显示背光处的细部,然而会在明亮处达到饱和。
很短的曝光可显示明亮处的细部,而将背光部淹没在噪波基底中。
显示背光处的细部所需的最长曝光时间与显示明亮处的细部所需的最短曝光时间的比值能可靠地评估场景的动态范围。
为什么动态范围受到限制为什么摄像机的动态范围功能受到限制?动态范围限制源于多种原因,主要是图像传感器的感光像素阵列的物理性质。
设想两个相同的图像传感器,只是感光像素阵列的面积大小及其相关的井位能不同,哪个传感器的动态范围更宽?答案是:具有更大像素阵列的那个。
由于井位能较大,场景范围上部的光通量很强,不会像较小的像素那么容易达到饱和。
场景范围底部几乎没有光子,较大的感光像素阵列面积可采集较多的光子,并降低小值读数的不准确度(即噪波)。
增大感光像素阵列的尺寸以实现更宽动态范围的需要,将感光像素阵列制造得更小以提高空间分辨率的需要,二者之间的冲突始终存在。
通常,由于像素阵列尺寸小而名义上较高的空间分辨率受到窄动态范围的严重拖累,从而导致噪波或修剪,或者两种后果同时存在。
噪波屏蔽包含背光处精细图像细部的微小信号变化,而修剪则消除了明亮处的细部。
成像的时间因素也促成了动态范围和空间分辨率之间的冲突——视域范围内的物体可能在移动,从而导致运动模糊。
运动模糊是降低空间分辨率的因素,因为它会使移动物体在多个相邻像素之间变得模糊。
降低运动模糊需要更短的积分时间,但反过来增加了测量噪波。
通过屏蔽细微的信号变化,噪波也损害了空间分辨率。
简而言之,由于小尺寸像素阵列的动态范围窄,运动模糊以及试图降低运动模糊的措施,导致有效传感器分辨率可能比标清分辨度低。
这是比值,而不是绝对范围动态范围这一概念的一个重要属性就是它被定义为一个比值而不是绝对值。
这意味着,具有相同动态范围的不同场景可能具有完全不同的平均亮度或绝对范围。
通过摄像机的光圈(用于限制照射到图像传感器的光量),上移或下移范围可产生同样的效果。
因此,对于不同的绝对范围和不同的光圈,指定支持特定动态范围的摄像机会产生不同的结果,这是因为其自身的功能确实具有绝对限制,主要由于其像素阵列的物理尺寸。
尤其是,对于一个具有给定动态范围但平均亮度较低(或光圈较小)的场景,即使摄像机完全支持该动态范围,也可能会产生更多噪波;而对于范围上移(或光圈较大)的场景中,可能会产生修剪,而且在中端可能会产生潜在的额外噪波,为宽动态摄像机所特有。
需要指出的是,光圈大小(用于限制照射到传感器的光量)也会影响景深,即在清晰度可接受情况下场景中最近和最远物体之间的距离。
因此,希望让更多光线照射到传感器(这有助于降低图像噪波和运动模糊)的需要,与获得更清晰图像的需要之间存在着冲突。
鲜为人知的是,不仅光圈的大小很重要,其形状也很重要。
从其通过的空间频率功率谱的角度来说,传统的圆形光圈并非最佳形状。
圆形光圈的功率谱包含多个零交点,这些零交点基本上能够从场景中过滤出一些内容。
有少量传统形状的光圈可以产生更好的空间响应,甚至可以容许更多的光线照射到传感器上,但是,使用这些光圈需要在图像处理时进行大量额外的运算。
多次曝光法是否可以采取什么办法来突破图像传感器的那些束缚了摄像机动态范围的物理限制?幸运的是,答案是肯定的。
最常用的方法是多次曝光法:以不同曝光时间(快门速度)捕捉两张或更多快照,然后合成为一张单独的宽动态范围图像。
较短的曝光可显示明亮处的场景细部而丢失了背光处的细部;较长的曝光可显示背光处的细部而对明亮处过度曝光。
由此产生的宽动态图像由来自快速快门和慢速快门图像的像素组成:快速快门图像的像素主要来自场景的较亮部分,而慢速快门图像的像素主要来自较暗部分。
大部分宽动态摄像机使用双快门法,有一些使用三快门和四快门技术来实现更宽的动态范围。
技术难点在于:选择多个单独曝光时间,并将多张单独快照合成一张宽动态图像。
选择快速快门时间的总体目标是避免明亮处的修剪,而在场景的较亮部分使信噪比达到最大值。
随着摄影机调整快速快门的速度,修剪可通过图像直方图由摄影机内置的自动曝光算法自动确定。
同样,选择慢速快门速度时,目标是防止暗处修剪(修剪会在背光处产生噪波)。
尽管这种方法看上去简单明了,但还需要考虑那些不太明显的因素。
例如,根据场景本身的情况,由快速快门曝光所捕捉的场景的较亮部分也可能包含了一些不太亮的区域,但这些区域不够暗,在最终的宽动态图像中,不会被来自慢速快门图像的像素取代。
同样,捕捉较暗区域的慢速快门图像可能包含一些不太暗的场景片段,这些片段又不够亮,在合成图像中不能够被快速快门的像素所取代。
结果,场景的这些中间区域可能没有获得足够的曝光——在慢速快门图像中曝光时间太长,可能会导致这些区域的过度曝光;在快速快门图像中曝光时间太短,可能会在受影响区域产生过量噪波。
这些曝光现象对最终宽动态图像的影响体现其自身的信噪比不连续,在动态范围中部表现为噪波过量区域。
宽动态成像的局限性需要指出的是,在一些大规模生产的宽动态技术中,由于某些技术和成本的限制,可供选择使用的快门比值非常有限。
因此,由于选择不适当的快门比值而产生的问题难以解决,使得噪波和其他现象很大程度上取决于场景本身。
宽动态成像的另一个局限性与运动现象有关。
由于快门速度不同,在两张(或更多)构成合成宽动态图像的单独快照中,捕捉图像时场景的移动部分会出现在不同的位置。
例如,设想一个暗色物体从背景明亮的场景中通过。
如果物体是静止的,在合成宽动态图像中的暗像素会来自慢速快门图像,而周围轮廓会来自快速快门图像。
但是,由于物体在移动,它在快速快门图像中轮廓与其在慢速快门图像中的轮廓不匹配。
因此,必须做出决定,如何弥补这种不匹配。
在运动伴有运动模糊的情况下,因为会产生处于物体和背景之间的亮度值,做决定会变得特别困难。
就彩色宽动态成像而言,除非在图像处理中采取特殊的运算措施,运动现象可能会在移动物体周围产生明亮的彩色轮廓。
此外,出现过量的暂时噪波时,还会导致类似运动的现象,结果会产生彩色噪波图。
在宽动态中抑制运动现象的措施称为运动补偿。
运动补偿可能会产生视觉现象,特别是在捕捉包含非常明亮的人工照明区域的宽动态场景时。
主要使用快速快门来捕捉场景的明亮区域。
如果快速快门的时间比人工照明半周期(在使用60Hz的国家为8.33ms,在使用50Hz的国家为10ms)的时间短,在快速和慢速快门图像之间会产生显著的局部亮度变化。
这些变化可能会被摄影机内置的运动补偿误认为是合法运动,从而导致视觉现象。
在这种情况下,禁用运动补偿可能是一种合理的解决方案。
在电视监控器上显示宽动态视频对于在电视监控器上显示宽动态范围视频方面是否有什么需要特殊考虑的问题?答案是肯定的,通常监控器无法显示宽动态范围视频图像,它们受动态范围的限制,该动态范围比典型的宽动态摄像机要窄200-300倍。
幸运的是,对此已有解决方案:通过利用人类视觉众多特性之一来解决这个问题,该方案更看重局部对比度的变化,而不看重构成整个场景的大区域之间的全局变化。
要利用这一解决方案,要对宽动态图像进行非线性图像处理(即色调映射),该过程会重新分配像素亮度值,在保持局部对比度的同时,降低全局对比度。
设想一个典型的宽动态场景,在此场景中,明亮部分与明亮的户外场景相对应,而背光部分与室内空间相对应。
如果大大缩小户外区域的整体亮度范围,使其更接近于较暗的室内区域的整体亮度范围,同时在两个区域保持局部亮度差异,场景的整体外观会保持完全可以被人眼所接受,而图像可以在监控器上显示。
色调映射和多快门图像捕捉需要指出的是,融合了多快门图像捕捉的色调映射是一种高度非线性过程,对于场景相对微小的变化,也可能会在宽动态图像外观上产生显著的差异。
这使其在对不同的宽动态摄像机的性能进行比较时特别具有挑战性,而且需要掌握大量的技术知识。
尤其是,必须注意确保视域(包括其纵横比)完全一样,光圈要相同。
此外,重要的是始终注意查看所捕捉的整体宽动态图像,而不是查看捕捉后的修剪片断,例如,只显示明亮区域。
这是因为,根据宽动态场景其余部分的情况,明亮区域的外观在总对比度、噪波含量和亮度方面可能完全不同。
如果完整场景中存在大片暗区域,通过色调映射和多曝光图像捕捉处理之后,与不存在大片暗区域的场景相比,明亮区域的外观在最终对比度、亮度和噪波方面会发生显著改变。
遗憾的是,展示捕捉之后经过修剪的宽动态图像已经成为一种普遍的做法,这将导致无法判断摄像机性能。