关于无刷电机和电调的基本原理
电调的名词解释

电调的名词解释电调(Electronic Speed Controller,简称ESC)是一种关键的电子设备,用于控制无刷直流电机(BLDC)的速度和转向。
在无人机、无人船、电动车等机械设备中,电调起到了至关重要的作用。
本文将详细解释电调的功能、原理和在不同领域中的应用。
一、电调的功能电调是将电能转化为机械能的重要组成部分。
它的主要功能是接收来自遥控器的信号,调整电机的转速和转向,以实现精确的控制。
通过提供不同的电力输出,电调可以使电机在不同的转速和方向下运行,从而实现精确的机动性能。
二、电调的原理电调通过调节电机驱动电流的大小和方向来控制电机的运行。
其基本原理是通过 PWM(脉宽调制)信号来控制电压和电流的大小。
遥控器发送的信号经过电调的解码,产生相应的 PWM 信号。
这个信号的占空比决定了电调输出给电机的电力大小。
电调内部的电子元件根据这个 PWM 信号的占空比来控制三相 MOSFET (金属-氧化物-半导体场效应晶体管),从而调整电机的速度和转向。
通过不断调整 PWM 信号的占空比,电调可以实现精确的转速调节。
三、电调在无人机中的应用无人机是电调应用最广泛的领域之一。
在无人机中,电调能够精确控制每个电机的转速,从而实现飞行器的稳定飞行、方向调整和悬停等功能。
特别是在多旋翼无人机中,电调能够独立控制每个旋翼的转速,保持无人机的平衡和稳定。
无人机的飞行控制系统通过与电调的通信,实现对电调的远程控制。
这种高度自动化和精确的控制使得无人机能够完成各种任务,如航拍、航测和物流配送等。
四、电调在无人船和电动车中的应用除了无人机,电调还广泛应用于无人船和电动车等领域。
在无人船中,电调可以控制船只舵机和推进器的转速,使其在水上精确导航和操控。
在电动车中,电调可以通过调节电机驱动电流的大小来控制车辆的速度和行驶方向。
这种高效的控制系统使得电动车能够提供优秀的行驶性能和节能特性。
五、电调的发展趋势随着科技的不断发展,电调的功能和性能也在不断提高。
无刷电机工作原理

无刷电机工作原理
无刷电机是一种采用无刷直流电机(BLDC)技术的电机,其工作原理基于电磁感应和控制器的调节。
它的主要构成部分包括电机转子、定子、感应器和控制器。
在无刷电机中,电机转子通常由一组永磁体组成,通过电流控制器中的电流来激励。
定子则由一组绕组组成,采用星形(Y 形)或三角形(Δ形)连接方式。
感应器则通过检测电机转子位置来提供闭环反馈控制信号。
工作时,电流控制器检测到感应器反馈的转子位置信息后,会根据预先设定的电流和速度控制算法控制电流的大小和方向。
在控制器的驱动下,电流会依次通过绕组,然后产生磁场。
根据电荷法则,电流通过绕组产生的磁场会与转子上的永磁体产生相互作用。
这种相互作用会导致转子受力并开始旋转。
通过不断改变电流的大小和方向,控制器可以精确地控制电机的运转速度和转矩。
无刷电机的工作原理和传统的直流电机相比具有许多优势,如高效率、高可靠性、高转速、较低噪声和长寿命。
因此,在许多应用领域中,无刷电机已取代了传统的直流电机成为首选驱动方案。
无刷电机工作及控制原理(图解)

无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
无刷电机控制原理

无刷电机控制原理
无刷电机是一种应用广泛的电动机,其控制原理相比传统有刷电机更为复杂,但也更加高效和可靠。
无刷电机通过电子器件来控制转子的位置,以实现精确的转速控制和高效的能量转换。
本文将介绍无刷电机的控制原理及其应用。
1. 无刷电机的基本原理
无刷电机由定子和转子两部分组成,定子上布置有若干个绕组,转子上搭载永磁体。
当定子绕组通电时,会在定子和转子之间产生磁场,从而使转子受到电磁力的作用而转动。
无刷电机的控制原理在于通过智能电子器件来控制定子绕组通电的时机和电流大小,以精确控制转子的位置和转速。
2. 无刷电机的控制器
无刷电机的控制器主要由驱动电路和控制算法两部分组成。
驱动电路用于控制定子绕组的通断,通常采用功率晶体管或功率MOS管来实现。
控制算法则通过传感器反馈的数据来计算转子的位置,再根据设定的转速控制策略来调节定子绕组的电流,从而控制转子的位置和转速。
3. 无刷电机的应用
无刷电机广泛应用于各种领域,如家用电器、工业自动化、电动车
辆等。
在家用电器中,无刷电机通常用于空调、洗衣机等产品中,其高效率和低噪音特性受到消费者的青睐。
在工业自动化领域,无刷电机常用于机器人、数控机床等设备中,实现精确的位置控制和高效的能量转换。
在电动车辆领域,无刷电机作为动力源,具有高效率、低排放的优势,被广泛应用于电动汽车、电动自行车等产品中。
无刷电机通过电子器件精确控制定子绕组的通断,实现精准的转子控制和高效的能量转换。
其控制原理复杂但高效可靠,被广泛应用于各种领域。
希望本文对无刷电机控制原理有所帮助,让读者对其有更深入的了解。
无刷电机工作及控制原理(图解)

无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
无刷电机内部结构及工作原理介绍
无刷机电内部结构及工作原理介绍
无刷机电内部结构及工作原理介绍
一,无刷机电内部结构图
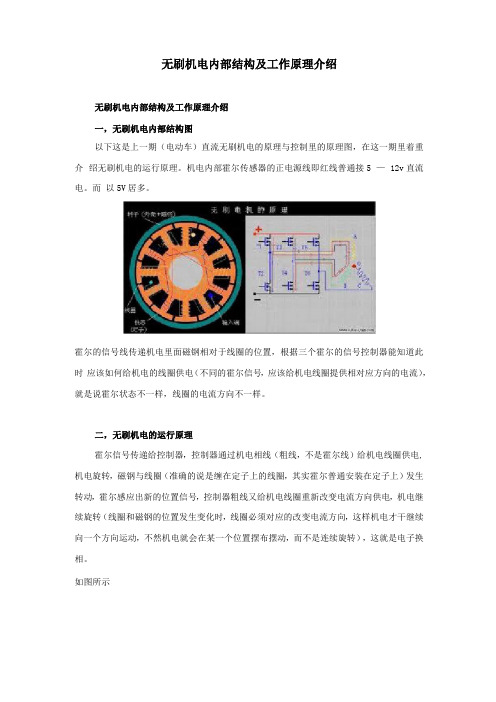
以下这是上一期(电动车)直流无刷机电的原理与控制里的原理图,在这一期里着重介绍无刷机电的运行原理。
机电内部霍尔传感器的正电源线即红线普通接5 — 12v直流电。
而以5V居多。
霍尔的信号线传递机电里面磁钢相对于线圈的位置,根据三个霍尔的信号控制器能知道此时应该如何给机电的线圈供电(不同的霍尔信号,应该给机电线圈提供相对应方向的电流),就是说霍尔状态不一样,线圈的电流方向不一样。
二,无刷机电的运行原理
霍尔信号传递给控制器,控制器通过机电相线(粗线,不是霍尔线)给机电线圈供电, 机电旋转,磁钢与线圈(准确的说是缠在定子上的线圈,其实霍尔普通安装在定子上)发生转动,霍尔感应出新的位置信号,控制器粗线又给机电线圈重新改变电流方向供电,机电继续旋转(线圈和磁钢的位置发生变化时,线圈必须对应的改变电流方向,这样机电才干继续向一个方向运动,不然机电就会在某一个位置摆布摆动,而不是连续旋转),这就是电子换相。
如图所示
I
m
swiT sw5|
埜"/ 211邸栗迎u 431
d 5 I .1
UF
图1
z园
IZ
1JF
图3
1
圧
图5
IZ。
无刷电机工作及控制原理(图解)

无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
无刷直流电机工作原理及PWM调速
稀土永磁材料的Hci 比Hcb 大很多,退磁曲线测
量到Hcb 时,被测的稀土永磁体几乎没有退磁;只有
测量到Hci 这一点时,稀土永磁体才退磁了。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(6)最大磁能积(BH)max 在B-H 曲线上,每一点都对应一组数值(B,H) 及其乘积BH。在Br 点,H 值为0,故BH 乘积为0; 在Hcb 点B 值为0,故BH乘积也为0。在此两点之间
必定有一点的BH 乘积达到最大,记为(BH)max,并
称它为最大磁能积。永磁材料的最大磁能积代表储存
在它里面的磁能密度。
永磁材料的去磁曲线表示永
磁材料被完全磁化后无外励
磁时的 B—H关系。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料分类 常用的永磁材料有铝镍钴(AlniCo)、钡铁氧体 (Ba-Ferrite)和锶铁氧体(Sr-Ferrite)、钐钴 (SmCo 2∶17 型和SmCo 1∶5 型)和钕铁硼 (NdFeB),这是按发明的先后顺序排列的; 若按年产吨位排列则为:铁氧体、钕铁硼、铝镍 钴、钐钴;若按销售额排列则为:铁氧体和钕铁 硼并列第一,然后是钐钴、铝镍钴。
Wb。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(2)磁通密度(B)
单位面积(S)上垂直通过的磁通量(Φ)叫做磁 通密度(B),B=Φ/S。 1T=1Wb/m2,1G=1Mx/cm2,1T=10000G