无感无刷直流电机之电调设计全攻略
无刷直流电机设计流程

无刷直流电机设计流程嘿,朋友!今天咱就来唠唠无刷直流电机设计这档子事儿。
这无刷直流电机啊,就像是一个神奇的小宇宙,里面藏着好多学问呢。
要开始设计无刷直流电机,第一步就得明确它的用途。
这就好比你要盖房子,得先知道这房子是用来住人啊,还是做仓库。
我有个朋友叫小李,他想设计一个用于小型无人机的无刷直流电机。
那他就得考虑这个电机要足够轻便,动力还得强劲,能让无人机飞得又稳又快。
这时候就像是给这个电机定了个大方向,就像航海的时候有了指南针一样。
接下来就是确定电机的主要参数啦。
这里面的门道可不少呢。
比如说额定功率、额定转速、转矩这些。
这额定功率啊,就像是一个人的力气大小。
要是功率定小了,就像让一个小孩去干大人的活,根本带不动嘛!而转速就好比一个人跑步的速度,转矩呢,有点像一个人能使出来的爆发力。
我曾经见过一个新手在设计无刷直流电机时,乱定参数,结果电机造出来,那性能差得呀,就像一辆破自行车,怎么骑都费劲。
选磁钢材料也是很关键的一步。
这磁钢材料就像是电机的灵魂所在。
不同的磁钢材料性能差别可大了去了。
有铁氧体磁钢,还有稀土永磁材料呢。
稀土永磁材料虽然贵一些,但是它的性能就像超级英雄一样厉害。
我跟同行老张讨论的时候,他就说:“这稀土永磁材料就像魔法材料一样,能让电机的性能一下子提升好几个档次,不过成本就像个拦路虎啊。
”这时候就得在性能和成本之间权衡,就像走钢丝一样,得小心翼翼。
然后就是绕组的设计啦。
绕组就像是电机的经脉一样。
绕组的匝数、线径这些都很重要。
匝数多了,就像给电机穿上了厚厚的衣服,电阻增大,电流就不好通过了。
匝数少了呢,又像是衣服穿得太薄,性能也会受影响。
这时候就得像裁缝一样,精心剪裁,找到最合适的匝数和线径。
我在学习绕组设计的时候,可没少向老师傅请教。
老师傅就说:“这绕组设计啊,就像绣花,一针一线都得恰到好处。
”转子和定子的设计也不能马虎。
转子就像电机的心脏,定子就像它的外壳。
转子的结构形状会影响电机的转动惯量。
自制电调原理说明
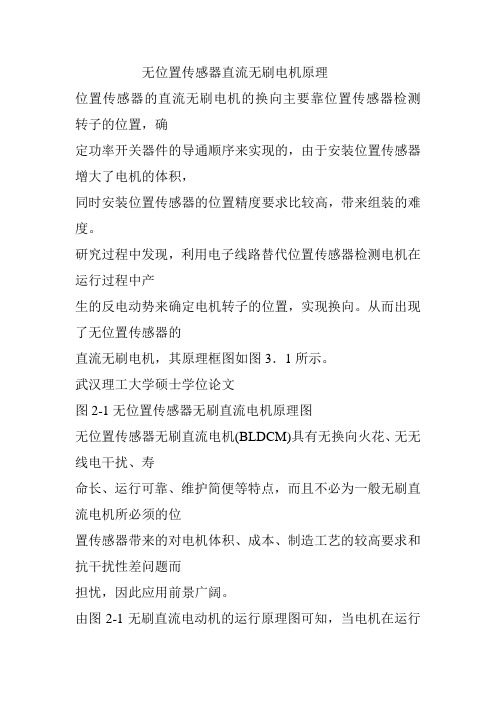
无位置传感器直流无刷电机原理位置传感器的直流无刷电机的换向主要靠位置传感器检测转子的位置,确定功率开关器件的导通顺序来实现的,由于安装位置传感器增大了电机的体积,同时安装位置传感器的位置精度要求比较高,带来组装的难度。
研究过程中发现,利用电子线路替代位置传感器检测电机在运行过程中产生的反电动势来确定电机转子的位置,实现换向。
从而出现了无位置传感器的直流无刷电机,其原理框图如图3.1所示。
武汉理工大学硕士学位论文图2-1无位置传感器无刷直流电机原理图无位置传感器无刷直流电机(BLDCM)具有无换向火花、无无线电干扰、寿命长、运行可靠、维护简便等特点,而且不必为一般无刷直流电机所必须的位置传感器带来的对电机体积、成本、制造工艺的较高要求和抗干扰性差问题而担忧,因此应用前景广阔。
由图2-1无刷直流电动机的运行原理图可知,当电机在运行过程中,总有一相绕组没有导通,此时可以在该相绕组的端口检测到该绕组产生反电动势,该反电动势60度的电角度是连续的,由于电机的规格,制造工艺的差别,导致相同电角度的反电动势值是不同,如要通过检测反电动势的数值来确定转子的位置难度极大。
因此必须找到该反电动势与转子位置的关系,才能确定转子的位置。
由于BLDCM的气隙磁场、反电势、以及电流波型是非正弦的,因此采用直交轴坐标变化不是很有效的分析方法。
通常直接利用电机本身的相变量来建立数学模型。
假设三相绕组完全对称,磁路不饱和,不计涡流和磁滞损耗,忽略齿槽相应,则三相绕组的电压平衡方程则可以表示为:根据电压方程得电机的等效电路图,如图2.2所示:2.3.2反电势法电机控制的原理无刷直流电机中,受定子绕组产生的合成磁场的作用,转子沿着一定的方向转动。
电机定子上放有电枢绕组,因此,转子一旦旋转,就会在空间形成导体切割磁力线的情况,根据电磁感应定律可知,导体切割磁力线会在导体中产生感应电热。
所以,在转子旋转的时候就会在定子绕组中产生感应电势,即运动电势,一般称为反电动势或反电势哺1。
基于DSP控制无传感器的无刷直流电动机调速系统

文章编号:100320794(2006)022*******基于DSP 控制无传感器的无刷直流电动机调速系统石晓艳,刘淮霞(安徽理工大学,安徽淮南232001)摘要:介绍了基于T MS320LF2407DSP 控制的无位置传感器无刷直流电机调速系统。
系统通过反电动势法实现位置检测,同时给出了系统的硬件和软件构成。
最后通过实验证明该系统具有较宽的调速范围、优越的静态和动态特性。
关键词:无位置传感器;无刷直流电机;DSP中图号:T M33文献标识码:BB ased on DSP Control System for Sensorless B rushlelss DC MotorSHI Xiao -yan ,LIU H u ai -xia(Anhui Science and T echnology University ,Huainan 232001,China )Abstract :A control system for sens orless brushlelss DCm otor (BLDC M )based on T MS320LF2407DSP is pre 2sented.The system uses the back electrom otive force (E MF )method to realize rotor positioning by measuring the terminal v oltage.And the s oftware and hardware design s olution for this system are described.Experiment re 2sults indicate that control system has wide range of speed regulation ,excellent static and dynamic behavior.K ey w ords :sens orless ;BLDC M;DSP1 控制原理介绍(1)无位置传感器无刷直流电机的工作原理本文采用的是感应电动势法。
无刷直流电机工作原理及PWM调速
稀土永磁材料的Hci 比Hcb 大很多,退磁曲线测
量到Hcb 时,被测的稀土永磁体几乎没有退磁;只有
测量到Hci 这一点时,稀土永磁体才退磁了。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(6)最大磁能积(BH)max 在B-H 曲线上,每一点都对应一组数值(B,H) 及其乘积BH。在Br 点,H 值为0,故BH 乘积为0; 在Hcb 点B 值为0,故BH乘积也为0。在此两点之间
必定有一点的BH 乘积达到最大,记为(BH)max,并
称它为最大磁能积。永磁材料的最大磁能积代表储存
在它里面的磁能密度。
永磁材料的去磁曲线表示永
磁材料被完全磁化后无外励
磁时的 B—H关系。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料分类 常用的永磁材料有铝镍钴(AlniCo)、钡铁氧体 (Ba-Ferrite)和锶铁氧体(Sr-Ferrite)、钐钴 (SmCo 2∶17 型和SmCo 1∶5 型)和钕铁硼 (NdFeB),这是按发明的先后顺序排列的; 若按年产吨位排列则为:铁氧体、钕铁硼、铝镍 钴、钐钴;若按销售额排列则为:铁氧体和钕铁 硼并列第一,然后是钐钴、铝镍钴。
Wb。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(2)磁通密度(B)
单位面积(S)上垂直通过的磁通量(Φ)叫做磁 通密度(B),B=Φ/S。 1T=1Wb/m2,1G=1Mx/cm2,1T=10000G
航模直流无刷无感电机调速控制系统设计

・
3 0・
《 测控技术)06年第 2 卷第 7期 2o 5
航 模 直 流 无 刷 无 感 电机 调 速 控 制 系 统设 计
戴 敏, 曹 杰 ,史 金 飞
20 9 ) 10 6 ( 东南 大学 机械工程系 , 江苏 南京
摘要 : 对航 模 用无 传 感器 无刷 直流 电机 的特 点 , 针 设计 开发 了其专 用调 速控 制 系统 。首 先 分析 了无 传感
S me b sc t o i s s c smeh d fp sto t ci n PW M o to n trig p l y o e s ls o a i he re , u h a t o s o o i n dee to , i c n r la d satn o i fs n e e s BLD— c CM r se t d i h rt Th r wa e d sg i a e n MEGA8 mir c nr le . o e o to i— a e dis re n t e f s . e ha d r e in s b s d o i c o o tol r S me k y c nr lcr c t e dic s e F n l a ts e u to o to ln his ns re s BLDCM n a r mo Hi g i p cfe . ui a s u s d. i al e tr s l fc n r lig mu — e o l s sr y, i e o de n s s e i d i
种 航 模 用 电机 的 测 试 结 果 。
关键 词 : 无位 置传 感 器 ; 无刷 直流 电机 ; 制 系统 ; E A 控 M G8 中 图分 类 号 :M3 1 T 0 文献标 识 码 : 文 章编 号 :0 0— 8 9 2 0 )7— 0 0— 4 B 10 8 2 (0 6 0 0 3 0
(完整版)无刷直流电动机无传感器控制方法

无刷直流电动机无传感器低成本控制方法关键词:无刷直流电动机无位置传感器控制可编程逻辑器件1 引言无刷直流电机的无传感器控制是近年来电机驱动领域关注的一项技术。
无位置传感器控制的关键在于获得可靠的转子位置信号,即从软、硬件两个方面间接获得可靠的转子位置信号来代替传统的位置传感器[1~3]。
采用无传感器控制技术的无刷电机具有结构简单、体积小、可靠性高和可维护性强等优点,使其在多个领域内得到了充分的利用[4]。
目前对于无传感器无刷电机的控制多采用单纯依靠DSP软件控制的方法[5],但是由于控制算法计算量大,执行速度较慢,且DSP 成本较高,不利于以后向市场推广。
同时也出现了应用于无传感器BLDCM控制的一些专用的集成电路[6],但由于这些芯片可扩展性和通用性较低,而且价格昂贵,只适用于低压、小功率领域。
为了扩展无传感器BLDCM应用领域,降低其控制系统的成本,扩充控制系统的功能,增加控制系统的灵活性,本文以MCU+PLD方式组成控制系统的核心,利用PLD数字逻辑功能,分担MCU 的逻辑运算压力,使MCU和PLD的功能都得到了最大程度的发挥。
对于无位置传感器BLDCM 控制系统,本文着重分析了换相控制策略和闭环调速,最后通过仿真和实验,验证了控制系统的合理性和可行性。
2 系统的总体硬件设计本文中所设计系统是以8位PIC单片机和PLD构成的硬件平台,硬件结构框图如图1所示。
图1 系统总体结构硬件框图功率逆变电路采用三相全桥逆变结构,电机定子绕组为Y接法,电机工作模式为三相6状态方式。
在本文无传感器控制方式中采用反电动势过零位置检测方法,位置检测电路根据电机端电压获取3路位置信号,将信号送入PIC单片机进行软件移相后得到3路换相信号,由可编程逻辑器件进行逻辑解码后输出6路驱动开关管的前极信号,通过驱动芯片IR2233产生驱动信号以控制各开关管的导通与关断。
该系统采用速度单闭环方式,通过改变PWM的占空比以达到调速的目的。
霍尼韦尔EZRUN MAX系列车用无感无刷电机电子调速器说明书
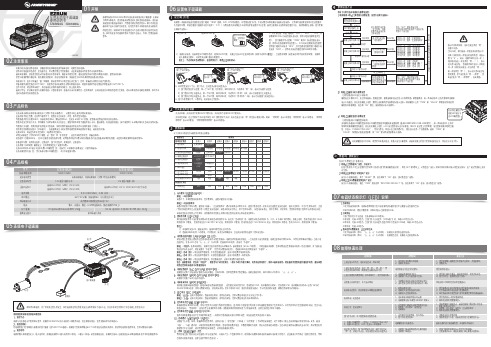
——20151015排线将电调和编程盒连通后,然后给电调接上电源,LCD 设定盒将显示出开机界面,按LCD 设定盒上任意按键,设定盒和电调开始建立通信,并显示“CONNECTING ESC” ,等待几秒后,将显示出当前的模式名 ,随后显示出第一个设置参数。
使用 “ITEM”和“VALUE” 按键即可更改设置参数,按“OK”键可将设置参数存入电调。
感谢您购买EZRUN MAX系列车用无感无刷电机电子调速器!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。
请在使用设备前仔细阅读说明书,严格遵守规定的操作程序。
我们不承担因使用本产品而引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任;同时我们不承担因擅自对产品进行修改所引起的任何责任。
我们有权在不经通知的情况下变更产品设计、外观、性能及使用要求。
参数说明3有以下几种恢复出厂参数方法:1)利用SET键恢复出厂设置,方法如下:在油门摇杆处于中立点位置的任意时刻(除进行油门校调或编程设定时),按住 SET 键3秒以上,可恢复出厂设定。
红绿灯同时闪烁时表示恢复设定成功,出厂设定需重新上电方可生效。
2)利用LED参数设定卡恢复出厂设定:设定卡与电调连通后,按下“RESET”键,然后再按下“OK”保存,即可恢复出厂设置。
3)利用LCD多功能编程盒恢复出厂设定:设定卡与电调连通后,通过“ITEM”选项选到“RESTORE DEFAULT”项,然后再按下“OK”保存,即可恢复出厂设置。
1.启动阶段1)红灯持续快速闪烁:电调未检测到油门信号或电调内部存储的油门中点数值与遥控器不匹配。
2)绿灯闪烁N次:锂电节数检测,闪烁N次表示当前锂电为N节。
2.行驶阶段1)油门摇杆处于中点区域,红色和绿色LED均熄灭。
2)前进时,红色LED恒亮;当油门处于正向最大(100%油门)时,绿色LED也会点亮。
3)刹车时,红色LED恒亮;当油门处于反向最大且最大刹车力度设为100%时,绿色LED也会点亮。
无刷电调

无刷电调调速传动系统的各项重要指标:1)、调速范围:最高与最低转速相比。
2)、调速平滑性:相邻两档转速的差值越小越平滑。
3)、调速的工作特性:静态特性主要是调速后机械特性的硬度,对绝大多数负载,机械特性越硬,则负载变化时,速度变化越小,工作越稳定。
动态特性主要为升速和降速过程是否快而平稳。
当负载突然增减与电压突然变化时,系统转速能否迅速地恢复。
4)、调速系统的经济性。
主要从价格、调速运行效率、调速系统故障率,售后服务与支持等方面衡量。
5)、负载转矩特性:一般来说空气、水、油等介质对机械阻力基本上都是和转速二次方成正比。
即负载转矩TZ=KN²电动直升机航模用的动力一般为无刷直流电动机,无刷直流电动机的结构与交流永磁同步电动机相似,其定子上有多相绕组,转子上镶有永磁体,无刷直流电动机的优点和关键特征如下:1)本质上是多相交流电动机,但经过控制获得类似直流电动机特性;2)需要多相逆变器驱动;3)无电刷和换相器,即使在高转速下,也可得到较高的可靠性;4)效率高;5)低的EMI6)可实施无传感器控制;按照无刷直流电动机工作原理,必须有转子磁极位置信号来决定电子开关的换相。
装有转子位置传感器(例如霍尔元件)就称为有感无刷电机。
有感无刷电机装传感器检测电气相位可分为60°/120°/180°/240°/300°等。
根据电气相位的不同,电子换相驱动方式就略有不同,开关时序将不同,如6步换相180°变频:经过6个节拍,无刷电机的定子中将产生一个旋转磁场,带动转子转动,每个开关的一个状态在连续的3个节拍中保持不变,相当于在磁场中180°的范围内保持不变。
6步换相120°变频:则每个开关的一个状态在连续的2个节拍中保持不变,相当于在磁场中120°的范围内保持不变。
位置传感器的存在占用了电动机的一些空间、安装位置对准、需要引出线等问题,随着微机控制技术的高速发展,无位置传感器控制技术和方法也获得快速进展,利用无传感器技术,无刷直流电动机不必装专门的位置传感器,从而简化电动机结构和尺寸,减少了引线,进而降低电动机成本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.1 电流检测..........................................................................................................................52 3.2 定时器延时与PWM信号 ................................................................................................53
1. 无刷直流电机基础知识..............................................................................................................2
1.1 三个基本定则....................................................................................................................2 1. 左手定则......................................................................................................................2 2. 右手定则(安培定则一)..........................................................................................3 3. 右手螺旋定则(安培定则二)..................................................................................3
无感V0.01
前 言 ..............................................................................................................................................1
1.3 外转子无刷直流电机的工作原理.....................................................................................8 1. 一般外转子无刷直流电机的结构..............................................................................8 2. 新西达 2212 外转子电机的结构................................................................................8
1. 六臂全桥驱动电路原理............................................................................................31 2. 功率场效应管的选择................................................................................................33 2.3 电流检测电路..................................................................................................................45 2.4 反电势过零检测电路......................................................................................................49 2.5 制作你自己的电调线路板..............................................................................................50
1.2 内转子无刷直流电机的工作原理....................................................................................3 1. 磁回路分析法.............................................................................................................4 2. 三相二极内转子电机结构..........................................................................................5 3. 三相多绕组多极内转子电机的结构 ..........................................................................7
2. 无感无刷电调的驱动电路设计................................................................................................30
2.1 电池电压监测电路..........................................................................................................30 2.2 换相控制电路..................................................................................................................30
1. 定时器初始化............................................................................................................54 2. 定时器T0 的溢出中断服务程序 ..............................................................................54 3. 利用T0 延时(毫秒极) ..........................................................................................54 4. 利用T0 延时(微秒极) ..........................................................................................55 5. PWM信号的产生 .....................................................................................................55 3.3 过零事件检测与电机换相..............................................................................................56 1. BLMC.h中定义的宏 ................................................................................................56 2. 过零检测与换相代码分析.......................................................................................59
1.4 无刷直流电机转矩的理论分析......................................................................................14 1. 传统的无刷电机绕组结构........................................................................................14 2. 转子磁场的分布情况................................................................................................15 3. 转子的受力分析........................................................................................................16 4. 一种近似分析模型....................................................................................................18
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
By: timegate 墨鸢 技术交流 QQ:1181733110 email:moyuan2000@
第 ii 页
无感无刷直流电机之电调设计全攻略