无刷电调
无刷电调 MOS管保护电路

无刷电调MOS管保护电路
无刷电调中使用MOS管作为保护电路是一种常见的做法。
MOS管是一种半导体器件,具有高阻抗输入和低阻抗输出的特点,因此能够有效地保护电调免受短路和过流等危害。
MOS管保护电路通常由一个MOS管和一些支持元件组成,如电阻、电容等。
当电调面临短路或过流时,MOS管会开始工作并限制电流流动,从而保护电调免受危害。
MOS管保护电路可以设计成电流限制型或电压限制型,根据电调的特点进行选择。
其中,电流限制型的保护电路能够在短时间内有效限制电流增长,而电压限制型的保护电路能够更好地保护电调免受短路危害。
总之,无刷电调中使用MOS管作为保护电路是一种常见的做法。
MOS管具有高阻抗输入和低阻抗输出的特点,可以有效地保护电调免受短路和过流等危害。
MOS管保护电路可以设计成电流限制型或电压限制型,根据电调的特点进行选择。
无刷电调编程讲解

无刷电调编程讲解
无刷电调是一种电子元件,常用于控制电机的转速和方向。
为了实现不同的功能,需要对无刷电调进行编程。
下面是无刷电调编程的讲解:
1. 确定编程设备:通常使用电脑和USB转串口线作为编程设备。
2. 安装编程软件:根据无刷电调的品牌和型号,选择相应的编程软件并安装。
3. 连接电调和编程设备:将USB转串口线连接到电脑的USB端口上,另一头连接到电调的编程口上。
4. 进入编程模式:根据电调的说明书,按压指定按键或操作指令,进入编程模式。
5. 编写程序:在编程软件中编写程序,实现电调所需的功能。
常见的功能包括调整最大电流、最大转速和刹车时间等。
6. 下载程序:将编写好的程序下载到电调中,以实现相应的功能。
7. 测试:将电调和电机连接,进行测试以确认编程是否成功。
如果存在问题,可以重新进入编程模式并修改程序。
以上就是无刷电调编程的基本讲解,希望能够帮助大家更好地理解和使用无刷电调。
- 1 -。
无刷电调原理

无刷电调原理
无刷电调是一种用来控制无刷直流电机转速和方向的电子设备,它通过对电机的供电方式进行调节,实现对电机的精确控制。
无刷电调的原理是基于电机的三相交错驱动,通过对电机的三相绕组进行合理的供电,可以实现电机的正转、反转以及精准的转速控制。
首先,无刷电调通过对电机的三相绕组进行合理的供电来实现电机的正转和反转。
在正常情况下,电机的三相绕组会按照特定的顺序进行供电,从而产生磁场和驱动电机转动。
而无刷电调则可以通过改变三相绕组的供电顺序,来改变电机的转动方向,从而实现电机的正转和反转。
其次,无刷电调可以实现对电机转速的精确控制。
通过改变电机的供电频率和占空比,可以实现对电机转速的精确调节。
一般来说,通过改变电机的供电频率可以实现对电机转速的粗略调节,而通过改变电机的供电占空比可以实现对电机转速的精细调节。
这样,无刷电调可以实现对电机转速的精确控制,从而满足不同应用场景对电机转速的需求。
此外,无刷电调还可以实现对电机的启动和制动控制。
在电机启动时,无刷电调可以通过逐渐增加电机的供电频率和占空比来实现电机的平稳启动;在电机制动时,无刷电调可以通过逐渐减小电机的供电频率和占空比来实现电机的平稳制动。
这样,无刷电调可以实现对电机启动和制动过程的精确控制,从而保证电机在启动和制动过程中的安全性和稳定性。
综上所述,无刷电调是一种通过对电机的三相绕组进行合理的供电,实现对电机转速和方向精确控制的电子设备。
它可以实现对电机的正转、反转和精确转速控制,同时还可以实现对电机的启动和制动控制。
在无刷电机应用领域广泛的今天,无刷电调作为其重要的控制设备,发挥着越来越重要的作用。
HOBBYWING无刷电调说明书
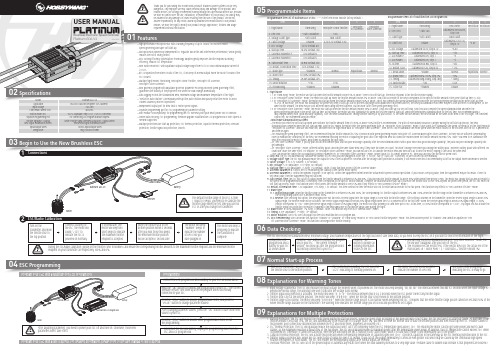
0102Specifications03Begin to Use the New Brushless ESC04ESC Programming05Programmable Items06Data Checking07Normal Start-up ProcessProgrammable Item List of Platinum 60A V4 ESC. (“*” in the form below indicate factory defaults. )Programmable Item List of Multifunction LCD Program BoxUSER MANUALPlatinum 60A V4Brushless Electronic Speed Controller201512031. Flight Mode1.1. In “Fixed-wing” mode, the motor will start up when the throttle amount reaches 5% or above. There is no soft start-up, the motor responds to the throttle increase rapidly.1.2. In “Helicopter (Linear Throttle)” mode, the motor will start up when the throttle amount reaches 5% or above. And it will accelerate to the RPM corresponds to the specific throttle amount in the preset start-up time (4~25s). 1.3. In “Helicopter (Elf Governor)” mode, the motor will start up when the throttle amount reaches 40% or above. And it will complete the speed standardization and enter the speed-governing operation in the preset start-up time(4~25s). In this mode, the motor will standardize its speed every time it starts up. Due to different discharge rates/capabilities of different batteries, the RPM you standardize each time may be a little different. In consequence, at the same throttle amount, the RPM may be a bit different when using different batteries, but this won’t affect the speed-governing effect.1.4. In “Helicopter (Store Governor)” mode, the motor will start up when the throttle amount reaches 40% or above. It will also start up in a very soft way. And it will also complete the speed standardization and enter thespeed-governing operation in the preset start-up time. In this mode, the motor will only standardize its speed the first time when it starts up. When performing RPM standardization for the first time, we recommend using afully-charged battery with good discharge capability. After the RPM standardization, change another battery to fly your aircraft. At the same throttle amount, the RPM should be the same as the RPM of the first flight. For consistent control feel, we recommend using this mode. About RPM Standardization & Others• The motor will enter the soft start-up when user switches the throttle amount from 0 to 40% or above (50% throttle is recommended). The pitch of main blades should be 0 degree during the soft start-up process, the RPMstandardization completes when the soft start-up ends, and the ESC makes the motor enter the speed-governing state. In “Helicopter (Store Governor)” mode, if user wants to re-standardize the speed, he needs to set the flight mode to “Helicopter (Elf Governor)” and save this mode first, and then reset the flight mode back to “Helicopter (Store Governor)”, then the ESC will re-standardize the motor speed when the motor rotates for the first time after the ESC is powered off and then on again.• For ensuring the speed-governing effect, we recommend setting the throttle amount to 85% or below in both speed-governing modes (Helicopter (Elf Governor)&Helicopter (Store Governor), so there will be sufficient compensating room to maintain the consistency of the RPM. We recommend replacing the motor or adjusting the gear ratio if the expected RPM still cannot be reached when the throttle amount exceeds 85%. (Note: You need to re-standardize the RPM after replacing the motor, blades, body frame or adjusting the gear ratio.)• In “Heli Store Governor” mode, if you fly your aircraft with another pack that has poor discharge capability after the RPM standardization (with a pack which has good discharge capability), the pack has poor discharge capability will get damaged.• In “Helicopter (Store Governor)” mode, different battery packs can bring the same stable RPM only if they have the same cell count. This won’t change even when you change the battery pack. However, battery packs with different cell count don’t have the same effect. For instance, in “Helicopter (Store Governor)” mode, you can not use a 4S to calibrate the motor RPM and then use a 6S to drive the motor, hoping it can run at the same RPM. • User can decide the control feel via adjusting Governor Parameter P/I. In “Helicopter (Store Governor)” mode, connect your ESC to a smart phone or PC, then you can check the throttle vs speed chart.2. LiPo Cells: the ESC will automatically calculate the number of LiPo cells you have plugged in as per the “3.7V/Cell” rule if “Auto Calc” is selected. Or user can set this item manually.3. Voltage Cutoff Type: the ESC will gradually reduce the output to 50% of the full power in 3 seconds after the voltage cutoff protection is activated, if soft mode is selected..It will immediately cut off all the output when hard mode is selected.4. Cutoff Voltage: 2.7V-3.7V (custom), 3.3V (default).5. BEC Voltage: 5-8V (adjustable), 0.1V (step), 6V (default).6. Start-up Time: 4-25s (adjustable), 1s (step), 15s (default). (Note: It only functions in Heli Elf/Store Governor Mode)7. Governor Parameter P: Control the ESC maintaining the stability of the current motor speed.8. Governor Parameter I: Control the dynamic response. To be specific, control the supplement extent when the actual motor speed is below expectation. If you choose a very big value, then the supplement may be too much. If select a very small value, then the supplement may not sufficient.9. Auto Restart Time: the ESC will cut off its output when the throttle amount is between 25% and 40%. If you increase the throttle amount to above 40% within preset time period (0-90s), the motor will rapidly start up and accelerate to the speed (in the programmed Restart Acceleration Time) corresponds to the specific throttle amount, complete the shutdown and restart up.If you move the throttle stick to over 40% beyond the preset time period, the ESC will enter the soft start-up process. (Note: This function won’t effect unless the throttle amount is over 25% and it only effects in “Heli Governor Elf/Store” mode.)10. Restart Acceleration Time: 1-3s (adjustable), 0.5s (step), 1.5s (default). This item controls the time the motor will cost to restart and accelerate to the full speed. (This function only effects in “Heli Governor Elf/Store” mode) 11. Brake Type11.1. Proportional Brake: when the throttle range on the transmitter is between 20% and 100%, the corresponding ESC throttle output is between 0% and 100%.When the throttle range on the transmitter is between 20% and 0%, the corresponding brake force is between 0 and 100%.11.2. Reverse: after selecting this option, the RPM signal wire will turn into a reverse signal wire (the signal range is in line with the throttle range). After setting a channel on the transmitter, when the reverse signal length is above 20% signal length, the Reverse mode will be activated. The reverse signal length must be below 20% signal length when the ESC is powered on for the first time. When the reverse signal length is below 20% signal length, 0-100%throttle corresponds to “CW”; when the reverse signal length is above 20% signal length, the motor will stop spinning CW (and then spin CCW); at this time, 0-100% throttle corresponds to “CCW”. Any signal loss will activate the throttle signal loss protection, no matter it happens to the RPM signal wire or the throttle signal cable during the flight.12. Brake Force: 0-100% (adjustable), 1% (step), 0 (default). (Note: this function only effects in “Normal Brake” mode.)13. Timing: 0-30° (adjustable), 1° (step), 15° (default).14. Motor Rotation: CW/CCW. User can adjust this item via a multifunction LCD program box.15. DEO Freewheeling: User can decide this function “Enabled” or “Disabled” in “Fixed Wing” mode or in “Heli (Linear Throttle Response)” mode. This item has been preset to “Enabled” and cannot be adjusted in “Heli (Elf Governor/Store Governor)” mode. This function can brings better throttle linearity.Model Application Input VoltageCont./Peak Current (10s)(Switch-mode) BEC Platinum 60A V4450-480 Class Heli (Propeller: 325-360mm )3-6S LiPo 60A/80A5V-8V Adjustable (Step: 0.1V), 7A/18A Cont./Peak For connecting LCD Program Box/WIFI Express White Throttle Signal Wire/Red & Black BEC Output Wires/Yellow RPM Signal Transmission Wire14AWG Input/Output Wires 49g / 48x30x15.5mmProgrammingConnect the LCD program box and a battery to your ESC as shown above.Platinum 60A V4Program Your ESC with a WIFI Express: For detailed information, please refer to the user manual of WIFI Express.Turn on the transmitter, and then move the throttle stick to the bottom position.After connected to a battery, the ESC will emit “♪123” indicating it’s normally powered on.The motor will emit several beeps to indicate the number of LiPo cells.The motor emits a long beep indicating the ESC is ready to go.08Explanations for Warning Tones1. Input voltage is abnormal: The ESC will measure the input voltage the moment when it’s powered on. The motor will keep beeping “BB, BB, BB” (the interval between two BBs is 1 second) when the input voltage is beyond the normal range. The warning tone won’t stop until the voltage turns normal.2. Throttle signal loss protection is activated: The motor will beep “B-, B-, B-” (the interval between two B-s is 2 seconds) when the ESC doesn’t detect any throttle signal.3. Throttle stick is not at the bottom position: The motor will beep “B-B-B-B-B-” when the throttle stick is not moved to the bottom position.4. Throttle range is too narrow: The motor will beep “B-B-B-B-B-” when the throttle range you set is too narrow (when designing this ESC, it requires that the entire throttle range you set cannot be less than 50% of the whole throttle range available on the transmitter.) The warning tone indicates the throttle range you set is void and you need to set it again.09Explanations for Multiple Protections1. Start-up Protection: The ESC will monitor the motor speed during the start-up process. When the speed stops increasing or the speed increase is not stable, the ESC will take it as a start-up failure. At that time, if the throttle amount is less than 15%, the ESC will automatically try to restart up; if it is larger than 15%, you need to move the throttle stick to back the bottom position and then restart up the ESC. (Possible causes of this problem: poor connection/ disconnection between the ESC and motor wires, propellers are blocked, etc.)2. ESC Thermal Protection: The ESC will gradually reduce the output but won’t cut it off completely when the ESC temperature goes above 110℃. For ensuring the motor can still get some power and won’t causecrashes, so the maximum reduction is about 50% of the full power. The ESC will gradually resume its maximum power after the temperature lowers down. In addition, the ESC temperature cannot exceed 70℃ when it’s powered on. Otherwise, it cannot be started up. (Here we are describing the ESC’s reaction in soft cutoff mode, while if in hard cutoff mode; it will immediately cut off the power.)3. Capacitor Thermal Protection: The ESC will activate this protection when the operating temperature of capacitors goes over 130℃. It protects capacitors in the same way as the ESC thermal protection does to the ESC .4. Throttle Signal Loss Protection: When the ESC detects loss of signal for over 0.25 second, it will cut off the output immediately to avoid an even greater loss which may be caused by the continuous high-speed rotation of propellers or rotor blades. The ESC will resume the corresponding output after normal signals are received.5. Overload Protection: The ESC will cut off the power/output or automatically restart itself when the load suddenly increases to a very high value. (Possible cause to sudden load increase is that propellers are blocked.)0104可编程参数项目及其说明Platinum 60A V420151203空模无刷电子调速器使用说明书下表中带“*”的为出厂默认参数:可编程参数表(英文对照)1、飞行模式1.1 固定翼模式下,油门达到5%启动电机,无缓启动,油门响应迅速;1.2 直升机线性模式下,油门达到5%启动电机,有缓启动,马达在设定的缓启动时间内加速至当前油门应有转速;1.3 直升机精灵定速模式下,油门达到40%启动电机,有缓启动,马达在设定的缓启动时间内完成转速标定进入定速运行状态。
无刷电调原理
无刷电调原理无刷电调是现代电动车、电动机车等电动车辆中的重要部件,它通过控制电动车辆的电机转速和转矩,实现车辆的动力输出和驱动。
无刷电调的原理是基于电机控制技术和电子调速技术,通过对电机进行精准的控制,实现电动车辆的高效、稳定和可靠的运行。
无刷电调的工作原理主要包括电机驱动、电流控制、速度控制和位置控制等方面。
首先,无刷电调通过控制电机的三相电流,实现电机的正反转和转速调节。
其次,无刷电调通过对电机的电流进行精准控制,实现电机的高效运行和能量回馈。
此外,无刷电调还可以通过对电机的转速和位置进行闭环控制,实现电动车辆的精准驱动和运动控制。
在无刷电调中,电机驱动是实现电机正反转和转速调节的关键。
电机驱动通过对电机的三相电流进行控制,实现电机的正反转和转速调节。
在正常运行时,电机驱动会根据电动车辆的速度需求和驱动模式,调节电机的电流和相位,实现电机的高效运行和动力输出。
电流控制是无刷电调中的另一个重要部分,它通过对电机的电流进行精准控制,实现电机的高效运行和能量回馈。
在电动车辆行驶时,电流控制会根据电机的负载和速度需求,调节电机的电流和相位,实现电机的高效运行和能量回馈,提高电动车辆的续航里程和动力性能。
速度控制是无刷电调中的另一个重要部分,它通过对电机的转速进行精准控制,实现电动车辆的速度调节和动力输出。
在电动车辆行驶时,速度控制会根据车辆的速度需求和驱动模式,调节电机的转速和相位,实现电动车辆的平稳加速和高速行驶。
位置控制是无刷电调中的另一个重要部分,它通过对电机的转子位置进行闭环控制,实现电动车辆的位置定位和运动控制。
在电动车辆行驶时,位置控制会根据车辆的位置需求和驱动模式,实现电机的位置定位和运动控制,提高电动车辆的行驶稳定性和安全性。
综上所述,无刷电调是电动车辆中的重要部件,它通过对电机的电流、速度和位置进行精准控制,实现电动车辆的高效、稳定和可靠的运行。
无刷电调的原理是基于电机控制技术和电子调速技术,通过对电机进行精准的控制,实现电动车辆的高效驱动和运动控制。
无刷电调原理

无刷电调原理无刷电调是指采用电子元件来控制电动机转速和方向的一种技术。
它主要应用于直流无刷电机和无刷交流电机。
无刷电调相比传统的有刷电调具有更高的效率、更稳定的性能和更长的使用寿命,因此在现代工业和家用电器中得到了广泛的应用。
无刷电调的原理是通过控制电动机的相序和电流来实现电机的转速和方向控制。
无刷电机内部有三个电磁线圈,分别为A、B、C 相。
当电流依次通过A、B、C三相线圈时,电机就会按照固定的顺序进行旋转,这就是所谓的相序控制。
而无刷电调就是通过控制电机的三相电流来实现相序的控制,从而控制电机的转速和方向。
无刷电调主要由控制器、功率放大器和传感器组成。
控制器负责接收外部指令,计算电机的转速和方向,然后输出相应的控制信号。
功率放大器接收控制器的信号,将其放大后送入电机的三相线圈,从而控制电机的电流。
传感器则用来检测电机的转子位置,将检测到的位置信号反馈给控制器,以便控制器及时调整电机的相序。
在无刷电调中,控制器通常采用微处理器或者专用的控制芯片。
它能够实时监测电机的转速和位置,根据外部指令和传感器反馈的信息进行计算,然后输出相应的控制信号。
功率放大器则通常采用功率场效应管或者功率集成电路,它能够将控制器输出的低功率信号放大为足够驱动电机的高功率信号。
传感器则通常采用霍尔元件或者光电编码器,它能够实时检测电机转子的位置,并将位置信息反馈给控制器。
总的来说,无刷电调通过控制器、功率放大器和传感器的协同作用,实现了对电机转速和方向的精确控制。
它不仅提高了电机的效率和性能,同时也降低了电机的噪音和电磁干扰。
因此,无刷电调技术在工业自动化、电动车辆、无人机等领域有着广阔的应用前景。
无刷电调的参数

无刷电调的参数
无刷电调是舵机中的一种,用于操控舵机的转动和速度。
无刷电调的参数包括电压、电流、转速、最大电流、电机类型、电机线径等。
其中,电压和电流是无刷电调的基本参数,一般情况下,电压范围为2-11V,电流范围为1-10A。
转速则根据电机型号和线径而定,一般为5000-10000转/分。
最大电流是指无刷电调能承受的最大电流值,如果超过该值,无刷电调将会烧毁。
电机类型则分为直流无刷电机和交流无刷电机两种,对应的无刷电调也有所不同。
电机线径则是指电机内部的线径,通常为0.2-1.2mm。
以上这些参数都是需要在购买或使用无刷电调时需要注意的,不同的参数对无刷电调的使用效果以及电机的转动效果都会有一定的影响。
- 1 -。
无刷电调原理
无刷电调原理无刷电调(Brushless Electronic Speed Controller,简称ESC)是无刷电机驱动系统中的关键组件,用于控制电机的转速和方向。
它通过接收来自遥控器的信号,将信号转化为电流和电压输出给无刷电机,实现对电机的精确控制。
无刷电调的原理主要包括电机驱动和信号解码两个部分。
下面将逐步介绍无刷电调的工作原理。
第一部分:电机驱动无刷电机是由线圈和磁铁组成的。
当电流通过线圈时,会在磁铁上产生磁场。
根据磁场的相互作用,电机转子会受到力的作用而旋转。
无刷电调的主要任务是控制电机的电流,从而控制电机的转速和方向。
无刷电调通过驱动电路将直流电源的电流转化为交流电流,然后通过线圈给电机供电。
驱动电路包括功率管、驱动电路和控制电路。
功率管负责将直流电源的电流转换为交流电流,驱动电路负责控制功率管的开关,控制电路负责接收来自遥控器的信号,并将信号转化为控制电路所需的电压和电流。
第二部分:信号解码无刷电调通过信号解码将来自遥控器的信号转化为电流和电压输出给无刷电机。
信号解码主要包括PWM解码和协议解码两个部分。
PWM解码是将来自遥控器的PWM信号转化为控制电机转速和方向的电流和电压。
PWM信号是一种脉冲宽度调制信号,通过改变脉冲的宽度来控制电机的转速和方向。
无刷电调通过解码PWM信号,将信号转化为电流和电压输出给无刷电机。
协议解码是将来自遥控器的特定协议信号解码为电流和电压输出给无刷电机。
不同的遥控器使用不同的通信协议,无刷电调需要根据不同的协议对信号进行解码,以实现对电机的精确控制。
总结:无刷电调是无刷电机驱动系统中的关键组件,通过控制电机的电流和电压,实现对电机转速和方向的精确控制。
无刷电调的工作原理主要包括电机驱动和信号解码两个部分,通过驱动电路将直流电源的电流转换为交流电流,并通过解码来自遥控器的信号,将信号转化为电流和电压输出给无刷电机。
无刷电调的工作原理非常复杂,但它的应用却非常广泛,广泛应用于模型飞机、无人机、电动车等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
调速传动系统的各项重要指标:
1)、调速范围:最高与最低转速相比。
2)、调速平滑性:相邻两档转速的差值越小越平滑。
3)、调速的工作特性:静态特性主要是调速后机械特性的硬度,对绝大多数负载,机械特性越硬,则负载变化时,速度变化越小,工作越稳定。
动态特性主要为升速和降速过程是否快而平稳。
当负载突然增减与电压突然变化时,系统转速能否迅速地恢复。
4)、调速系统的经济性。
主要从价格、调速运行效率、调速系统故障率,售后服务与支持等方面衡量。
5)、负载转矩特性:一般来说空气、水、油等介质对机械阻力基本上都是和转速二次方成正比。
即负载转矩TZ=KN²
电动直升机航模用的动力一般为无刷直流电动机,无刷直流电动机的结构与交流永磁同步电动机相似,其定子上有多相绕组,转子上镶有永磁体,无刷直流电动机的优点和关键特征如下:
1)本质上是多相交流电动机,但经过控制获得类似直流电动机特性;
2)需要多相逆变器驱动;
3)无电刷和换相器,即使在高转速下,也可得到较高的可靠性;
4)效率高;
5)低的EMI
6)可实施无传感器控制;
按照无刷直流电动机工作原理,必须有转子磁极位置信号来决定电子开关的换相。
装有转子位置传感器(例如霍尔元件)就称为有感无刷电机。
有感无刷电机装传感器检测电气相位可分为60°/120°/180°/240°/300°等。
根据电气相位的不同,电子换相驱动方式就略有不同,开关时序将不同,如6步换相180°变频:经过6个节拍,无刷电机的定子中将产生一个旋转磁场,带动转子转动,每个开关的一个状态在连续的3个节拍中保持不变,相当于在磁场中180°的范围内保持不变。
6步换相120°变频:则每个开关的一个状态在连续的2个节拍中保持不变,相当于在磁场中120°的范围内保持不变。
位置传感器的存在占用了电动机的一些空间、安装位置对准、需要引出线等问题,随着微机控制技术的高速发展,无位置传感器控制技术和方法也获得快速进展,利用无传感器技术,无刷直流电动机不必装专门的位置传感器,从而简化电动机结构和尺寸,减少了引线,进而降低电动机成本。
它从电子电路中经检测后计算获得转子磁极位置信号,实现电子换相,如电感法、反电动势法,其中以反电动势法(BEMF)较为成功。
近年无传感器无刷直流电动机控制技术在航模电动机中的应用日渐增多。
无刷直流电动机从电子换相控制模式上可分为两大类:方波驱动和正弦波驱动。
方波驱动相对而言控制电路简单、控制芯片种类多且价廉,应用广泛,是目前绝大多数无刷电调采用的驱动方式。
但随着无传感器或外置式简易位置传感器正弦波换相控制技术的进步,无刷直流电动机的驱动控制将趋向正弦化发展。
正弦波驱动相比方波驱动更具优势:正弦波驱动的电动机产生的转矩与转子位置角度无关,当在电动机中的相电流强制为正弦波时,转子在任何位置下,由定子建立的磁场矢量与转子磁场矢量之间的夹角总是维持在90°,这个电角度正是对于给定电流下,能产生最大转矩且损耗最小的角度。
理论上,通常的方波驱动(6步换相、霍尔换相或梯形波驱动)直流电动机转矩纹波约为13%,而由于测量误差等因素影响,实际转矩纹波约为17%~20%。
而良好设计的正弦波驱动,转矩纹波仅为3%左右。
转矩纹波会导致电动机的振动、噪声、机械磨损,大大影响调速系统性能。
正弦波驱动还易于利用超前角技术拓宽调速范围,这也是方波驱动难以实现的。
所以正弦波驱动相比方波驱动具有低转矩波动,平滑的运动,更小的可闻噪声和易于利用超前角技术拓宽调速范围,节能高效等
优点。
正弦波驱动最重要是如何产生正弦脉宽调制(SPWM)脉冲,通常方法一种是利用微处理器计算查表得到;另一种利用专用集成芯片产生;调制后输出的正弦驱动波形一般有三种:1)
纯正弦波
2)
增强型——包含3次谐波,输出功率可提高20%。
3)
高效型——包含进一步优化的3次谐波(带死区),在一个周期中,高侧和低侧开关保持60°的间隙,使开关损耗降低30%,可减少散热片体积,提高功率电子器件的可靠性。
无刷电调硬件设计:
综上所述,了解了无刷直流电动机的特性和驱动控制原理,无刷电调硬件设计就变得容易了。
无刷电调硬件一般由:MCU微控制器+无刷电机控制芯片+栅极驱动芯片+功率电子器件(如MOSFET)组成,航模用还常带有UBEG(超小型开关电源模块)。
对于自制无刷电调,建议模友们根据所要驱动的单个模型电动机的类型(有感/无感/相数等)、功率、电压、电流,尽量选用相关高性能(带PLL锁相环、超前角控制、闭环调速)、高集成度的无刷电机控制芯片,此类芯片包含完整的无刷直流电机控制调速系统,甚至集成了功率器件在芯片内,应用起来很方便可靠,价格低廉。
不要在位置信号检测方法、换相计算、驱动方法等原理未完全精通的情况下采用偏软件形式方案(MCU微控制器+栅极驱动芯片+功率电子器件)。
这将大大简化你的设计,缩短开发时间,保证自制的成功性。
常用三相有感无刷直流电动机控制芯片有:LS7560、A3932、MC33033、MLX90401、NJM2625、RT992、SI9979、UCC3626、LB11690、A3936、BA6444、BA6840、FAN8403
常用三相无感无刷直流电动机控制芯片有:TB6520、TB6537、
TDA5145、ML4425、A8902、TB6515、LB1673、LB11981、ST72141 功率器件选用:
尽量选用高性能、集成度高的MOSFET或IGBT产品,以减少分立元件,简化电路,提高耐用性和可靠性。
MOSFET的缺点是电流容量和耐压相对小,但特点是栅极静态内阻极高,驱动功率很小,开关速度高、无二次击穿、安全工作区宽,所以特别适用于航模用小功率电机。
MOSFET的类型很多,按导电沟道可分P沟道和N沟道。
根据栅极电压与导电沟道出现的关系又可分耗尽型和增强型。
垂直P+结构的P-MOSFET(N沟道增强型)产品获得了更低的正向电阻,这类MOSFET产品的耐电压、耐电流能力更强。
IR公司至今已推出第八代功率MOSFET产品。
IGBT集中了MOSFET及BJT(双极型晶体管)的优点:具有高输入阻抗,可由逻辑电平直接驱动,电阻及损耗小、电流、电压容量大、抗浪涌电流能力强等。
IGBT适用于驱动较大功率电机。
基于上述设计理念,本人针对大型电动直升机(450以上)自设计了一款体积小,结构紧凑,使用简便,功能强大的超级无刷电调。
大电流,有感/无感通用,自适应电气相位,方波方式启动后自动切换成正弦波驱动和应用了超前角控制技术,并带电压、电流、故障保护功能。
现已完成硬件电路设计,正在编程中,调试完毕再与模友们交流。