(完整版)第6章作业及答案
七下数学第六章课本课后习题答案

七下数学第六章课本课后习题答案第六章:实数习题一:理解实数的概念1. 实数包括有理数和无理数。
有理数可以表示为两个整数的比,而无理数则不能表示为这种形式。
2. 无理数的例子包括圆周率π和黄金分割比φ。
3. 实数在数轴上可以找到对应的点,数轴上的每一个点都代表一个实数。
习题二:实数的分类1. 正实数:大于0的实数。
2. 负实数:小于0的实数。
3. 零:0是唯一的中性实数,既不是正数也不是负数。
习题三:实数的运算1. 加法:两个实数相加,正数与正数相加结果为正数,负数与负数相加结果为负数,正数与负数相加结果根据绝对值大小而定。
2. 减法:减去一个实数等于加上它的相反数。
3. 乘法:两个正数相乘结果为正数,两个负数相乘结果也为正数,正数与负数相乘结果为负数。
4. 除法:除以一个正数结果的符号与被除数相同,除以一个负数结果的符号与被除数相反。
习题四:实数的大小比较1. 所有正实数都大于0。
2. 所有负实数都小于0。
3. 正实数大于一切负实数。
4. 两个负实数,绝对值大的反而小。
习题五:平方根和立方根1. 平方根:一个数的平方根是另一个数,当这个数自乘时等于原数。
例如,4的平方根是2,因为2*2=4。
2. 立方根:一个数的立方根是另一个数,当这个数自乘三次等于原数。
例如,8的立方根是2,因为2*2*2=8。
习题六:无理数的近似1. 无理数通常需要用近似值来表示,例如π的近似值是3.14159。
2. 可以使用无限不循环小数来近似无理数,但要注意保留足够的位数以确保精度。
习题七:估算无理数的大小1. 估算无理数时,可以通过比较它与相邻的有理数来确定其大小。
2. 例如,π位于3和4之间,可以估计为3.14。
习题八:实数的四则运算法则1. 先进行乘除运算,再进行加减运算。
2. 同级运算,从左到右依次进行。
3. 括号内的运算优先级最高。
本章习题答案提供了对实数概念、分类、运算和估算的深入理解,帮助学生掌握实数的基本性质和运算规则。
第6章作业参考答案

1.12 两台 机通过其串行口直接通信时,通常只使用 两台PC机通过其串行口直接通信时 机通过其串行口直接通信时, 三 根信号线。( 。(A) 根信号线。( ) A. TXD、RXD和GND B. TXD、CTS和GND 、 和 、 和 C. DSR、CTS和GND D. DTR、RTS和GND 、 和 、 和 1.13 在通用微机中普遍采用的串行接口标准是。 (D) 在通用微机中普遍采用的串行接口标准是。 ) A. RS485 B. RS423 C. RS-422 D. RS-232C 1.14 一装置采用 一装置采用8251A进行串行同步通信,当选定通信速率 进行串行同步通信, 进行串行同步通信 波特时, 芯片的TXD及RXD引脚上的时钟 为9600波特时,施加于 波特时 施加于8251A芯片的 芯片的 及 引脚上的时钟 信号频率为 。 (C) ) A. 4800HZ B.2400HZ C. 9600HZ D. 19200HZ 1.15 RS-232C接口采用的信号电平范围是 接口采用的信号电平范围是 。 (C) ) A. 0~+5V B. -5V~+5V C. -15V~+15V D. 0~+15V 1.16 异步串行通信中,常采用波特率的 倍频作为接收时钟, 异步串行通信中,常采用波特率的16倍频作为接收时钟 倍频作为接收时钟, 其目的是 。 (B) ) A. 提高采样精度 B. 识别正确的起始位 C. 提高接收速率 4
。 (C) ) 之间的数据传输
(A) )
2
1.9 异步串行通信的主要特点是 。(A) 。( ) A. 传送的每个字符是独立发送的 B. 通信双方不需要同步 C. 字符之间的间隔时间应相同 D. 传送的数据中不含有控制信息 1.10 波特率是串行通信中的一项重要参数,以下说明中正确的 波特率是串行通信中的一项重要参数, 是 。 (B) ) A. 波特率是指单位时间内传送的字符数 B. 波特率是指单位时间内传送的二进制数的位数 波特率是指单位时间内传送的二进制数的位数 C. 波特率也称为波特率因子 D. 通常收/发时钟频率等于波特率 通常收/ 1.11 下列关于串行通信的叙述正确的是 。 (C) ) A. 串行通信只需一根导线 B. 半双工就是串口只工作一半工作时间 C. 异步串行通讯是以字符为单位逐个发送和接收的 D. 同步串行通讯的发、收双方可使用各自独立的局部时钟 同步串行通讯的发、
第六章作业及答案
第六章作业一、选择题1.若不考虑结点的数据信息的组合情况,具有3个结点的树共有种()形态,而二叉树共有( )种形态。
A.2 B。
3C。
4 D。
52.对任何一棵二叉树,若n0,n1,n2分别是度为0,1,2的结点的个数,则n0= ()A.n1+1B.n1+n2C.n2+1 D。
2n1+13。
已知某非空二叉树采用顺序存储结构,树中结点的数据信息依次存放在一个一维数组中,即ABC□DFE□□G□□H□□,该二叉树的中序遍历序列为()A。
G,D,B,A,F,H,C,E B。
G,B,D,A,F,H,C,EC。
B,D,G,A,F,H,C,E D.B,G,D,A,F,H,C,E4、具有65个结点的完全二叉树的高度为()。
(根的层次号为1)A.8 B.7 C.6 D.55、在有N个叶子结点的哈夫曼树中,其结点总数为()。
A 不确定B 2NC 2N+1D 2N—16、以二叉链表作为二叉树存储结构,在有N个结点的二叉链表中,值为非空的链域的个数为().A N-1B 2N-1C N+1D 2N+17、树的后根遍历序列等同于该树对应的二叉树的( )。
A. 先序序列B。
中序序列 C. 后序序列8、已知一棵完全二叉树的第6层(设根为第1层)有8个叶结点,则完全二叉树的结点个数最多是()A.39 B.52 C.111 D。
1199、在一棵度为4的树T中,若有20个度为4的结点,10个度为3的结点,1个度为2的结点,10个度为1的结点,则树T的叶节点个数是()A.41 B.82 C。
113 D.122二、填空题。
1、对于一个具有N个结点的二叉树,当它为一颗_____ 二叉树时,具有最小高度。
2、对于一颗具有N个结点的二叉树,当进行链接存储时,其二叉链表中的指针域的总数为_____ 个,其中_____个用于链接孩子结点,_____ 个空闲着。
3、一颗深度为K的满二叉树的结点总数为_____ ,一颗深度为K的完全二叉树的结点总数的最小值为_____ ,最大值为_____ 。
软件工程第6章-课后作业参考(附答案)
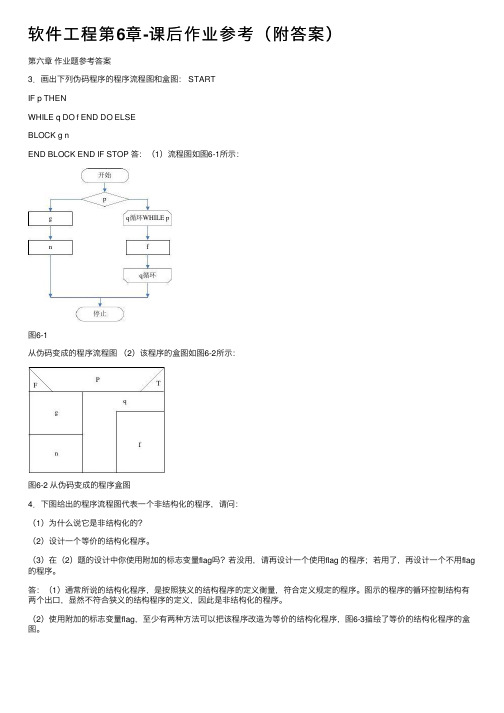
软件⼯程第6章-课后作业参考(附答案)第六章作业题参考答案3.画出下列伪码程序的程序流程图和盒图: STARTIF p THENWHILE q DO f END DO ELSEBLOCK g nEND BLOCK END IF STOP 答:(1)流程图如图6-1所⽰:图6-1从伪码变成的程序流程图(2)该程序的盒图如图6-2所⽰:图6-2 从伪码变成的程序盒图4.下图给出的程序流程图代表⼀个⾮结构化的程序,请问:(1)为什么说它是⾮结构化的?(2)设计⼀个等价的结构化程序。
(3)在(2)题的设计中你使⽤附加的标志变量flag吗?若没⽤,请再设计⼀个使⽤flag 的程序;若⽤了,再设计⼀个不⽤flag 的程序。
答:(1)通常所说的结构化程序,是按照狭义的结构程序的定义衡量,符合定义规定的程序。
图⽰的程序的循环控制结构有两个出⼝,显然不符合狭义的结构程序的定义,因此是⾮结构化的程序。
(2)使⽤附加的标志变量flag,⾄少有两种⽅法可以把该程序改造为等价的结构化程序,图6-3描绘了等价的结构化程序的盒图。
(a)解法1(b)解法2图6-3 与该图等价的结构化程序(⽤flag)(3)不使⽤flag把该程序改造为等价的结构化程序的⽅法如图6-4所⽰。
图6-4 与该图等价的结构化程序(不⽤flag)8.画出下列伪码程序的流图,计算它的环形复杂度。
你觉得这个程序的逻辑有什么问题吗?C EXAMPLELOOP:DO WHILE X>0A=B+1IF A>10THEN X=AELSE Y=ZEND IFIF Y<5THEN PRINT X,YELSE IF Y=2THEN GOTO LOOPELSE C=3END IFEND IFG=H+REND DOIF F>0THEN PRINT GELSE PRINT KEND IFSTOP答:(1)该伪码的流程图如图6-8所⽰:图6-8 程序流程图根据该程序流程图,可得该程序流图如图6-9所⽰:图6-9 程序流图环形复杂度V(G)=流图中的区域数=流图中判定结点数⽬+1=6+1=7 (判定结点为:1、3、6、8、10、11)(2)该算法问题在于控制最外层循环的变量Z不仅没有经过初始化,并且在该循环内部没有任何有可能该变Z的语句。
初二第6章练习题及答案
初二第6章练习题及答案第1题:已知多边形 ABCDE 是一个正五边形,点 F 是边 CD 中点,连接线段 AF,BF 和 CF。
求证:以 BC 为边,以线段 AF 为距离得到的垂直二等分线与线段 AF 垂直且使 BC 分为两等分。
解答:由于 ABCDE 是一个正五边形,所以 AB = BC = CD = DE = EA。
又因为 F 是边 CD 的中点,所以 CF = FD。
连接线段 AF,BF 和CF。
为了证明 BC 是以线段 AF 为距离得到的垂直二等分线,我们需要证明 BC 垂直于 AF,并且线段 BC 把线段 AF 分为两等分。
首先,我们证明 BC 垂直于 AF。
根据正五边形的性质,线段 AE 与线段 BC 平行,线段 AB 与线段 FC 平行。
由于线段 AF 是线段 AE 和线段 AB 的中线,所以线段 AF 平行于线段 BC。
根据平行线的性质,线段 AF 和线段 BC 垂直。
其次,我们证明线段 BC 把线段 AF 分为两等分。
根据正五边形的性质,线段 EA 和线段 BC 相等,线段 AB 和线段 FC 相等,所以三角形 ACE 和三角形 BCF 是全等的。
根据全等三角形的性质,线段 AC 和线段 BC 相等,线段 CE 和线段 CF 相等,所以线段 AC 和线段 CE 把线段 AF 分为两等分。
综上所述,以 BC 为边,以线段 AF 为距离得到的垂直二等分线与线段 AF 垂直且使 BC 分为两等分。
证毕。
第2题:如图,在平行四边形 ABCD 中,点 E 是边 AD 的中点,连接线段 BE 交边 BC于点 F,并延长线段 DC 到点 G。
求证:线段 FG是线段 AB 的三等分线。
解答:由于平行四边形 ABCD,所以 AB || CD。
已知点 E 是边 AD的中点,所以线段 BE 是边 AC 的中线,根据中线的性质,线段 BE =1/2 * AC。
设线段 BC = a,由于平行四边形 ABCD,所以线段 AB = CD = a,线段 AD = BC = a。
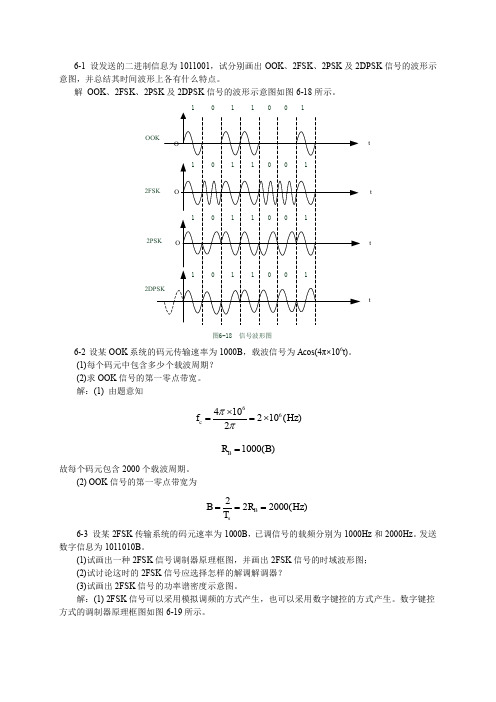
通信原理(陈启兴版) 第6章作业和思考题参考答案
基带信号
振荡器 1 f1
反相器
选通开关
相加器
e 2FSK(t)
振荡器 2 f2
选通开关
图 6-19 键控法产生 2FSK 信号的原理图
由题意知,码元传输速率 RB=1000B,若设“1”码对应的载波频率为 f1=1000Hz,“0”码对应的载 波频率为 f1=2000Hz,则在 2FSK 信号的时间波形中,每个“1”码元时间内共有 1 个周期的载波,每 个“0”码元时间内有 2 个周期的载波。2FSK 信号的时间波形如图 6-20 所示。【注:实际中键控法的 波形一般不连续。】
B 2RB 2 2106 4(MHz)
此时接收机输入端噪声方差为
输入端信噪比为
2 n
n0 B
6 1018
4106
2.41011(W )
非相干接收时系统的误码率为 (3)相干接收时的误码率为
r
a2
2
2 n
(40106 )2 2 2.41011
33.33
(1)若采用包络检波方式进行解调,试画出各点时间波形; (2)若采用相干方式进行解调,试画出各点时间波形; (3)求 2FSK 信号的第一零点带宽。 解:(1) 2FSK 信号的包络检波原理及其各个时间波形分别如图 6-22 和 6-23 所示。
e2FSK (t)
带通滤波器 1 A f1
包络检波器
Pe
1 2
erfc
r 105
解得信噪比应不小于 所以输入信号功率应不小于
r 9
Si
a2 2
r
2 n
9 4107
3.6106 (W )
高等数学第六章答案

高等数学第六章答案第六章定积分的应用第二节定积分在几何上的应用1? 求图中各阴影部分的面积?(1)(2) 1 1. 632? 332 (4)? 3 (3)2. 求由下列各曲线所围成的图形的面积?(1) 6??(2)4? 33?ln2? 21 (3)e??2? e(4)b?a93? ? 414? (1)?21(2)?4 35? (1) ?a2?(2) 32?a? 82 (3)18?a? ?6? (1)2?(2)?4? ?35? 4(3)及?2?cos2??6?127.求下列已知曲线所围成的图形? 按指定的轴旋转所产生的旋转体的体积:(1)y?x和x轴、向所围图形,绕x轴及y轴。
21(2)y?x2和y2?8x,绕x及y轴。
2(3)x??y?5??16,绕x轴。
2(4)xy=1和y=4x、x=2、y=0,绕。
(5)摆线x=a?t-sint?,y?a?1?cost?的一拱,y?0,绕x轴。
??482413(1,;(2)?,?;(3)160?2;(4)?;(5)5?2a3. 525568.由y?x3? x?2? y?0所围成的图形? 分别绕x轴及y轴旋转? 计算所得两个旋转体的体积?128?? 764? Vy?5 Vx?9.把星形线x2/3?y2/3?a2/3所围成的图形? 绕x轴旋转? 计算所得旋转体的体积?10.(1)证明由平面图形0?a?x?b? 0?y?f(x)绕y轴旋转所成的旋转体的体积为V?2?32?a3 105?xf(x)dx? 证明略。
a 2b (2)利用题(1)结论? 计算曲线y?sin x(0?x??)和x轴所围成的图形绕y轴旋转所得旋转体的体积? 2?11.计算底面是半径为R的圆? 而垂直于底面上一条固定直径的所有截面都是等边三角形的立体体积?3R? 22312.计算曲线y?x2上相应于3?x?8的一段弧的弧长。
12 33213.计算曲线y?ln(1?x)上相应于0?x?11的一段弧的弧长。
大学物理第6章习题参考答案

第六章习题解答6-1 解:首先写出S 点的振动方程 若选向上为正方向,则有:0c o s02.001.0ϕ=- 21cos 0-=ϕ,0s i n 00>-=ϕωυA 0sin 0<ϕ 即 πϕ320-=或π34 初始相位 πϕ320-=则 m t y s )32cos(02.0πω-=再建立如图题6-1(a)所示坐标系,坐标原点选在S 点,沿x 轴正向取任一P 点,该点振动位相将落后于S 点,滞后时间为: ux t =∆则该波的波动方程为:m u x t y ⎥⎦⎤⎢⎣⎡--=πω32)(cos 02.0若坐标原点不选在S 点,如习题6-1图(b )所示,P 点仍选在S 点右方,则P 点振动落后于S 点的时间为: uL x t -=∆则该波的波方程为:m uL x t y ⎥⎦⎤⎢⎣⎡---=πω32)(cos 02.0若P 点选在S 点左侧,P 点比S 点超前时间为ux L -,如习题6-1图(c)所示,则⎥⎦⎤⎢⎣⎡--+=πω32)(cos 02.0u x L t y⎥⎦⎤⎢⎣⎡---=πω32)(cos 02.0uL x t∴不管P 点在S 点左边还是右边,波动方程为: ⎥⎦⎤⎢⎣⎡---=πω32)(cos 02.0uL x t y6-2 解(1)由习题6-2图可知, 波长 m 8.0=λ 振幅A=0.5m习题6-1图习题6-1图频率 Hz 125Hz 8.0100===λuv周期 s 10813-⨯==vT ππυω2502==(2)平面简谐波标准波动方程为: ⎥⎦⎤⎢⎣⎡+-=ϕω)(cos u xt A y 由图可知,当t=0,x=0时,y=A=0.5m ,故0=ϕ。
将ϕπωω、、、u v A )2(=代入波动方程,得:m )100(250cos 5.0⎥⎦⎤⎢⎣⎡-=x t y π(3) x =0.4m 处质点振动方程.⎥⎦⎤⎢⎣⎡-=)1004.0(250cos 5.0t y π m )250cos(5.0ππ-=t6-3 解(1)由习题6-3图可知,对于O 点,t=0时,y=0,故2πϕ±=再由该列波的传播方向可知,00<υ取 2πϕ=由习题6-3图可知,,40.0m OP ==λ且u=0.08m/s ,则ππλππω52rad/s 40.008.0222====u v rad/s可得O 点振动表达式为:m t y )252cos(04.00ππ+=(2) 已知该波沿x 轴正方向传播,u=0.08m/s,以及O 点振动表达式,波动方程为:m x t y ⎥⎦⎤⎢⎣⎡+-=2)08.0(52cos 04.0ππ(3) 将40.0==λx 代入上式,即为P 点振动方程:m t y y p ⎥⎦⎤⎢⎣⎡+==ππ2152cos 04.00 (4)习题6-3图中虚线为下一时刻波形,由图可知,a 点向下运动,b 点向上运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章作业1、说明定时器T0的四种工作方式。
(P.145 第6题)2、假设单片机晶振fosc=6MHz,若要求定时分别为0.1ms , 1ms , 10ms,定时器T0工作在方式0、方式1、方式2时,其初值应为多少?晶振fosc=6MHz,则机器周期为2us定时0.1ms时的初始值:50=110010 B模式0:(213-50)=(8192-50)=8142=1111 1110 0 1110 BTH0=#FEH0 ; TL0=#0EH模式1:(216-50)=(65536-50)=65486=1111 1111 1100 1110 BTH0=#0FFH ;TL0=#0CEH模式2:(28-50)=(256-50)=206=1100 1110 BTH0=#0CEH ; TL0=#0CEH定时1ms时的初始值:500=111110100 B模式0:(213-500)=(8192-500)=7692=1111 0000 0 1100 BTH0=#0F0H ; TL0=#0CH模式1:(216-500)=(65536-500)=65036=1111 1110 0000 1100 BTH0=#0FEH ; TL0=#0CH定时10ms时的初始值:5000=1001110001000 B模式1:(216-5000)=(65536-5000)=60536=1110 1100 0111 1000 BTH0=#0ECH ; TL0=#78H3、假设单片机晶振fosc=6MHz,请利用T0和P1.0输出矩形波,矩形波的高电平宽50us,低电平宽300us。
(P.145 第13)晶振fosc=6MHz→机器周期为2us定时器T0使之工作于模式3定时50us的初值为:256-25=231 (E7H)定时300US的初值为:256-150=106 (6AH)方法1:MOV TMOD , #00000011B ;T0工作于模式3MOV TCON ,#0 ;清TR0 , TF0MOV TL0 , #0E7H ;高电平初值。
256-25SETB P1.0 ;P1.0口输出高电平SETB TR0 ;启动定时器T0LOOP1: JNB TF0 , LOOP1 ;检测T0是否溢出CLR TF0 ;清除溢出标志CLR TR0 ;关闭定时器MOV TL0 , #6AH ;写低电平初值 256-150SETB TR0 ;启动定时器T0CLR P1.0 ;使P1.0输出低电平LOOP2: JNB TF0 , LOOP2 ;检测T0是否溢出CLR TF0 ;清除溢出标志CLR TR0 ;关闭定时器MOV TL0 , #0E7H ;写高电平初值 256-25SETB TR0 ;启动定时器T0SETB P1.0 ;使P1.0输出高电平SJMP LOOP1 ;重复方法2:MOV TMOD , #03H ; T0工作于模式3MOV TCON , #0 ; 清TR0 , TF0MOV TL0 , #0E7H ; 高电平初值。
256-25SETB P1.0 ; P1.0口输出高电平SETB TR0 ; 启动定时器T0LOOP: JNB TF0 , LOOP ; 检测T0是否溢出CLR TF0 ; 清除溢出标志CLR TR0 ; 关闭定时器JNB P1.0 , NEXT ; P1.0口为低电平转移,; 高电平顺序执行MOV TL0 , #6AH ; 定时器T0写入低电平的定时初值SETB TR0 ; 启动定时器T0CLR P1.0 ; P1.0口输出低电平SJMP LOOP ; 返回重复NEXT: MOV TL0 , #0E7H ; 定时器T0写入高电平的定时初值 SETB TR0 ; 启动定时器T0SETB P1.0 ; P1.0口输出高电平SJMP LOOP ; 返回重复4、假设单片机晶振fosc=12MHz,用T1定时,试编程由P1.0和P1.1引脚分别输出周期为2ms和500us的方波。
(P.145 第14题)晶振fosc=6MHz→机器周期为1us定时器T0使之工作于模式1定时250us的初值为:65536-250 = 65286 = 1111 1111 0000 0110 B = FF06 H方法一:MOV TMOD , #10H ; T1工作于模式1MOV TCON , #0 ; TR1、TF1清零MOV TH1 , #0FFH ; 65536-250=(FF06H)MOV TL1 , #05H ;MOV R7 , #4 ; 2ms是500us的4倍SETB P1.0 ; P1.0置高电平SETB P1.1 ; P1.1置高电平SETB TR1 ; 启动定时器T1LOOP: JNB TF1 , LOOP ; 定时器是否溢出?CLR TF1 ; 定时器溢出后,清除定时器溢出标志 CPL P1.1 ; 取反P1.1DJNZ R7 , NEXT ; 4倍关系是否满足?MOV R7 , #4 ; 重写4倍关系CPL P1.0 ; 取反P1.0NEXT: CLR TR1 ; 关闭定时器T1MOV TH1 , #0FFH ; 重写定时器T1的初值MOV TL1 , #06H ;SETB TR1 ; 启动定时器T1SJMP LOOP ; 返回重复方法二:MOV TMOD , #20H ; T1工作于模式2MOV TCON , #0 ; TR1、TF1清零MOV TH1 , #6 ; 定时500us的初值(256-250)=6 MOV TL1 , #6 ;MOV R7 ,#4 ; 500us与2ms是4倍的关系SETB P1.0 ; 将P1.0置高电平SETB P1.1 ; 将P1.1置高电平SETB TR1 ; 启动定时器T1LOOP: JNB TF1 , LOOP ; 定时器T1是否溢出CLR TF1 ; 清溢出标志TF1CPL P1.1 ; 取反P1.1口DJNZ R7 ,LOOP ; (R7)-1→(R7),(R7)是否为0CPL P1.0 ; 取反P1.0口MOV R7 , #4 ; 重写R7SJMP LOOP ; 返回重复5、编写程序,其功能为:当P1.2引脚的电平上跳时,对P1.1输入的脉冲进行记数;当P1.2引脚的的电平下跳时,停止记数,并将结果存入R7R6中。
(P.146 第17题)MOV TMOD , #05H ; 定时器T0工作于方式1,计数方式 MOV TCON , #0 ; 清除TF0、TR0。
MOV TH0 , #0 ; 定时器T0初始值清零MOV TL0 , #0 ;LOOP1: JNB P1.2 , LOOP1 ; P1.2的电平是否上跳SETB TR0 ; 启动定时器T0开始计数LOOP2: JB P1.2 , LOOP2 ; P1.2的电平是否下跳CLR TR0 ; 停止计数MOV A , TL0 ; 将计数结果写入R7、R6,MOV R6 , A ; R6写入低8位MOV A , TH0 ;MOV R7 , A ; R7写入高8位6、设fosc=12MHz,编写程序,其功能为:对T0进行初始化,使之工作于模式2,产生200us的定时,并用查询T0溢出标志TF0的方法,控制P1.0引脚输出周期为2ms的方波。
(P.146 第18题)MOV TMOD , #02H ; T0工作于模式2,定时方式MOV TCON , #0 ; 清除TF0、TR0。
MOV TH0 , #56 ; (256-200)=56MOV TL0 , #56 ;MOV R7 , #5 ; 200us与1ms是5倍的关系SETB TR0 ; 启动定时器T0SETB P1.0 ; 将P1.0置高电平LOOP: JNB TF0 , LOOP ; 检测T0的溢出标志CLR TF0 ; 清除T0的溢出标志DJNZ R7 , LOOP ; 是否到5次MOV R7 , #5 ; 重新写入计数次数CPL P1.0 ; 取反P1.0口SJMP LOOP ; 循环往复7、fosc=6MHz,用模式1编程实现:以定时器T1进行外部事件计数,每计数1000个脉冲后,定时器T1转为定时工作方式,定时10ms后又转为计数方式,如此循环不止。
(P.145 第8题)MOV TCON , #0 ; 清TF1、TR1START: MOV TMOD , #50H ; T1工作于模式1,计数方式MOV TH1 , #0FCH ; (65536-1000)=FC18HMOV TL1 , #18H ;SETB TR1 ; 启动T1,计数开始LOOP1: JNB TF1 , LOOP1 ; 检测T1溢出标志CLR TF1 ; 清除T1溢出标志MOV TMOD , #10H ; T1工作于模式1,定时方式 CLR TR1 ; 关闭T1MOV TH1 , #0ECH ; (65536-5000)=EC6EHMOV TL1 , #6EH ;SETB TR1 ; 启动定时器T1LOOP2: JNB TF1 , LOOP2 ; 检测T1溢出标志CLR TF1 ; 清除T1溢出标志CLR TR1 ; 关闭T1SJMP START ; 循环不止第5章参考作业及答案8、89C51单片机的P3.3口有1Hz的方波输入,P3.5口有频率介于1KHz—5KHz 的周期信号输入,试利用定时器T1的相关功能,编程计算该周期信号的频率,并将其存于片外RAM2100H单元中。
MOV TMOD , #D0H ;T1:方式1、计数、开关由TR1和P3.3联合控制 CLR TF1 ;清除溢出标志CLR TR1 ;关闭定时器MOV TH1 , #0 ;写入计数初值MOV Tl1 , #0 ;LOOP1: JNB P3.3 , LOOP1 ;等待P3.3为高电平SETB TR1 ;启动定时器T1LOOP2: JB P3.3 , LOOP2 ;等待计数结束CLR TR1 ;关闭定时器T1CLR C ;清除进位标志MOV A , TL1 ;读取计数脉冲数的低8位RLC A ;低8位×2MOV DPTR , #2100H ;片外目的数据存储器地址指针MOVX @DPTR , A ;低8位存入要求的目标地址INC DPTR ;目标地址+1MOV A ,TH1 ;读取计数脉冲数的高8位RLC A ;低8位×2MOVX @DPTR , A ;低8位存入要求的目标地址方法二:利用中断方式思路:P3.3引脚上输入1Hz的方波,即每隔1秒钟中断一次,利用中断间隔测P3.5引脚的脉冲数。
ORG 0000HSJMP Main ;转移到主程序ORG 001BHAJMP T1 ;转移到真正的中断服务程序ORG 0030HMain: MOV TMOD , #50H ;定时器T1:方式1、计数、开关由软件控制 CLR TF1 ;清除定时器溢出标志CLR TR1 ;关闭定时器T1MOV IE , #08H ;允许定时器T1中断MOV IP , #0 ;未设置中断优先级别MOV TH1 , #0 ;计数初值MOV TL1 , #0 ;CLR F0 ;清除开始计数标志SETB EA ;开中断SJMP $ ;等待中断T1: JB F0 , NEXT ;判断是否开始计数SETB TR1 ;启动计数器SETB F0 ;计数标志置1SJMP NEXT1 ;转移NEXT: CLR TR1 ;关闭计数器CLR F0 ;计数标志清0MOV DPTR , #2100H ;地址指针指向目标地址MOV A , TL1 ;读计数器的低8位MOVX @DPTR , A ;存计数器的低8位MOV A , TH1 ;读计数器的高8位INC DPTR ;地址指针加1MOVX @DPTR , A ;存计数器的高8位NEXT1: JNB P3.3 , NEXT1 ;等待P3.3引脚上出现高电平RETI ;中断返回9、当系统选用6MHz晶体振荡器时,由T0工作在方式为2,利用中断响应,产生周期为2ms(脉冲宽度为1ms)的方波序列,并由P1.0输出。