交通流的特征
城市高速公路交通流的时空演化特征分析

城市高速公路交通流的时空演化特征分析城市的高速公路交通流一直是交通规划和管理者关注的焦点之一。
随着城市化进程的不断加快,道路交通压力不断增大,对城市高速公路交通流的时空演化特征进行分析与研究,有助于更好地了解交通系统的运行状态,为交通管理和规划提供科学依据。
一、交通流的时空演化特征城市高速公路的交通流是指在一段时间内通过城市高速公路的车辆数量。
交通流的时空演化特征表现为流量、密度和速度等方面的变化。
在高峰期,交通流量大,密度高,速度相对较低;而在非高峰期,交通流量较小,密度低,速度相对较高。
此外,交通流的时空演化还会受到道路结构、交通管理等因素的影响。
二、交通流时空演化特征的原因城市高速公路的交通流时空演化特征受多种因素的综合影响。
首先是人口增长和经济发展。
随着城市化进程的加快,城市的人口数量不断增加,经济活动也不断扩张,这导致了交通需求的增加,进而影响着交通流量的时空演化特征。
其次是道路网络的建设和完善。
城市的道路网络是支撑交通系统运行的基础,道路网络的建设和改善会直接影响到交通流的时空演化特征。
另外,交通管理的策略和手段也会对交通流的时空演化产生重要影响。
例如,交通信号灯的设置和优化、出行限行政策的实施等都会对交通流的时空演化产生一定的影响。
三、交通流时空演化特征研究的意义对城市高速公路交通流的时空演化特征进行研究具有重要意义。
首先,可以为交通管理者提供科学的依据和指导。
通过分析交通流的特征,可以了解交通系统的运行状态,有助于交通管理者制定科学合理的交通管理策略,提高道路的通行能力和运行效率。
其次,可以为城市规划者提供参考。
通过了解交通流的时空演化特征,可以为城市规划者提供有关交通系统布局、道路网络建设和交通设施配套等方面的信息,以满足未来城市发展和交通需求的要求。
此外,对交通流时空演化特征的研究还可以为交通预测和模拟提供基础。
通过建立交通模型,模拟不同交通场景下的交通流时空演化特征,可以为交通规划和管理决策提供参考和依据。
第四章 交通流特性

三、交通量的时间分布特性。 交通量是一个随机的时空变量,具有时空分布特性。 1、交通量的月变化:月不均衡系数
2、交通量的周变化:周变化系数
3、交通量的小时变化:小时变化系数 高峰小时流量比:高峰小时交通量占全天交通量之比 称为高峰小时流量比,我国一般为9%--10%。 高峰小时系数:高峰小时交通量与高峰小时某时段交 通量扩大为高峰小时交通量之比。
观测路段上所有车辆车头时距的平均值称为平均 车头时距。
2、车头间距:同向行驶的一列车队中,前后相邻两车 的车头之间的空间间隔,在观测路段上所有车辆车头 间距的平均值称为平均车头间距。
三、空间占有率和时间占有率。 1、空间占有率:观测路段中行驶的车辆总长度占该路 段长度的百分比。
2、时间占有率:在某一测定时间段内车辆通过某一断 面的累积时间在该测定时间的百分比。
2、年平均日交通量(AADT):一年的观测期内日交 通量的平均值,算法是一年的交通量总和与该年总天 数的比值,单位是veh/d,表达式为:
3、月平均日交通量(MADT):一个月的观测期内日 交通量的平均值,算法是一个月的交通量总和与该月 总天数的比值,单位是veh/d,表达式为:
4、周平均日交通量(WADT):一周的观测期内日交 通量的平均值,算法是一周的交通量总和与周天数的 比值,单位是veh/d,表达式为:
5、小时交通量:一小时内观测的交通量,单位是 veh/d。 高峰小时交通量(PHV):全天交通量最大的一个小 时称为高峰小时,该小时内的交通量称为高峰小时交 通量,通常有早、晚高峰交通流量。 年最大小时交通量(HAHY):一年内各个小时交通 量中最大的一个小时交通量。
年第30位小时交通量(30HV):将一年内各个小时 的交通量按从大到小顺序排列的第30个小时所对应的 交通量。常用30位小时交通量作为设计小时交通量。 6、交通流率:将不足一小时观测所得的交通量换算成 一小时交通量所得的比值,简称流率。
交通流的特性

二. 连续流特征
1. 总体特征
交通量Q、行车速度 V s 、车流密度K是表征交通流 特性中:Q——平均流量(辆/h); V s ——空间平均车速(km/h); K—平均密度(辆/km)。
能反映交通流特性的一些特征变量:
(1)极大流量Qm,就是Q-V曲线上的峰值。
例 4-1 V=88-1.6K ,如限制 车流的实际流量不大于最大流量的 0.8 倍,求速度的最低 值和密度的最高值?(假定车流的密度<最佳密度Km)
解:由题意可知:
当K=0时,V=Vf=88km/h,当V=0时,K=Kj=55辆/km。 则:Vm=44Km/h,Km=27.5辆/km,Qm=VmKm=1210辆/h。 由Q=VK和V=88-1.6K,有Q=88K-1.6K2 (如图)。当Q=0.8Qm时, 由88K-1.6K2=0.8Qm=968,解得:KA=15.2,KB=39.8。 则有密度 KA和KB与之对应,又由题意可知,所求密度小于 Km, 故为KA。 故当密度为KA=15.2辆/km,其速度为: VA=88-1.6KA =88-1.6×15.2 =63.68km/h 即KA=15.2辆/km,VA=63.68km/h为所求密度最高值与速度最低值。
V V f (1 Kj )
当交通密度很大时,可以采用格林柏(Grenberg)提 出的对数模型: K
V Vm ln
j
K
式中:Vm—对应最大交通量时速度。 当密度很小时,可采用安德五德 (Underwood) 提出 K 的指数模型:
V Vf e
Km
式中:Km—为最大交通量时的速度。
(2)临界速度Vm,即流量达到极大时的速度。
(3)最佳密度Km,即流量达到极大时的密量。
交通流特征与交通管理策略的关系

交通流特征与交通管理策略的关系在我们日常生活中,交通是一个无处不在的重要组成部分。
无论是上班通勤、购物出行还是休闲旅游,我们都离不开交通。
而交通流特征与交通管理策略之间存在着密切的关系,它们相互影响、相互作用,共同决定了交通系统的运行效率和安全性。
交通流特征是指交通流在时间和空间上的表现,包括交通流量、速度、密度、车头时距、车头间距等。
这些特征反映了交通流的运行状态和规律。
交通流量是指单位时间内通过某一道路断面的车辆数。
它是衡量交通需求的重要指标。
在高峰时段,交通流量通常较大,道路容易出现拥堵;而在非高峰时段,交通流量相对较小,道路通行较为顺畅。
交通流量的大小直接影响着交通管理策略的制定。
例如,在流量大的路段,可能需要采取限制通行、设置专用车道等措施来提高道路的通行能力。
速度是交通流的另一个重要特征。
车辆的行驶速度不仅影响着交通的效率,还与交通安全密切相关。
当车速过高时,容易发生交通事故;而车速过低则会降低道路的通行能力。
因此,交通管理部门需要通过设置限速标志、优化信号灯配时等手段来合理控制车速。
密度是指单位长度道路上的车辆数。
密度越大,车辆之间的间距越小,交通流越不稳定,容易引发拥堵。
在高密度交通流情况下,需要采取交通疏导、分流等措施来缓解交通压力。
车头时距和车头间距则反映了车辆之间的时间和空间间隔。
合理的车头时距和车头间距有助于保持交通流的稳定和安全。
交通管理策略是为了实现交通系统的高效运行、保障交通安全和减少环境污染等目标而采取的一系列措施和方法。
常见的交通管理策略包括交通规划、交通信号控制、道路设施优化、交通执法等。
交通规划是从宏观层面上对交通系统进行布局和设计。
它包括道路网络的规划、交通枢纽的设置、土地利用与交通的协调等。
合理的交通规划可以从源头上优化交通流的分布,减少交通拥堵的发生。
交通信号控制是通过对信号灯的设置和配时来调节交通流。
例如,根据不同时段的交通流量,调整信号灯的绿灯时间,以提高道路的通行效率。
交通流特征参数之间的关系

解:
1 Qm Kmvm 4 K jv f 2000
(辆/h)
1 vm 2 vf 40 (Km/h)
聊城大学汽车与交通工程学院
交通工程学
例2:对某道路上的交通流进行观测,发现速度——
密度关系为对数关系:
vs
40 ln(180) K
试求:该路段的阻塞密度Kj和最大交通流量Qm
Kj vs vm ln( K )
3600 ht
3600 1.5
240(0 pcu/车道?小时)
Q
v
f
(K
K K
2 j
)
vf
4Qm kj
4 2400 76.8(km / h) 125
Qபைடு நூலகம்
v
f
(K
K K
2 j
)
76.8(K
K2 )
125
聊城大学汽车与交通工程学院
交通工程学
第七节 间断流特性
间断流是指有外部固定因素影响的周期性中断 交通流 。在所有产生间断流的设施中,最重要的 是信号交叉口。
聊城大学汽车与交通工程学院
交通工程学
信号交叉口的交通流一般采用饱和车头时距、 饱和流率和损失时间来描述。 稳定行驶的连续流的车头时距称为饱和车头时距, 用ht表示,则饱和流率S为:
S 3600 ht
注:3600表示每个小时的时间之内,有效通行时 间为3600秒(注意具体情况具体分析)。
聊城大学汽车与交通工程学院
Q
K vs
Kv f
(1
K Kj
)
基于仿真的交通流特征分析
基于仿真的交通流特征分析交通是城市发展的命脉,而交通流则是交通系统中最核心的部分。
随着城市的不断发展和扩张,交通拥堵、事故频发等问题日益凸显,对交通流特征的深入分析显得尤为重要。
仿真技术作为一种有效的研究手段,为我们理解和优化交通流提供了有力的支持。
一、交通流仿真的基本概念交通流仿真,简单来说,就是通过建立数学模型和计算机程序,模拟真实交通系统中车辆的运行情况。
它可以在虚拟的环境中重现各种交通场景,包括道路网络、车辆类型、交通信号控制等。
在交通流仿真中,有几个关键的元素。
首先是车辆模型,它需要考虑车辆的尺寸、速度、加速度等特性。
其次是驾驶员行为模型,这涉及到驾驶员的反应时间、跟车行为、换道决策等。
再者是道路网络模型,包括道路的几何形状、车道数量、路口设置等。
二、交通流仿真的方法常见的交通流仿真方法主要有微观仿真、中观仿真和宏观仿真。
微观仿真以单个车辆为研究对象,详细地模拟车辆之间的相互作用和驾驶员的行为。
这种方法能够捕捉到交通流中的微观细节,如车辆的插队、急刹车等,但计算量较大,适用于较小规模的交通网络分析。
中观仿真则介于微观和宏观之间,它将车辆视为一组一组的,关注车辆群的整体行为。
中观仿真在计算效率和细节描述上取得了一定的平衡,适用于中等规模的交通网络。
宏观仿真主要关注交通流的整体特性,如流量、速度、密度等,不考虑单个车辆的行为。
它计算效率高,适用于大规模的交通网络规划和评估。
三、基于仿真的交通流特征分析的应用领域(一)交通规划与设计在新的道路建设或现有道路改造时,通过仿真可以预测不同设计方案下的交通流状况,从而选择最优的方案。
例如,确定道路的宽度、车道数量、路口的形状和信号配时等。
(二)交通管理策略评估对于交通拥堵的治理,各种交通管理策略如限行、限购、交通诱导等,可以先在仿真环境中进行测试和评估,了解其对交通流的影响,以便制定更有效的管理措施。
(三)智能交通系统研究智能交通系统中的先进技术,如自动驾驶、车路协同等,也可以通过仿真来研究其在交通流中的性能和潜在的影响。
交通流的特征
空间, x
道路
x v1 v2
hi vi vN
i
ti-1
ti T 时间, t
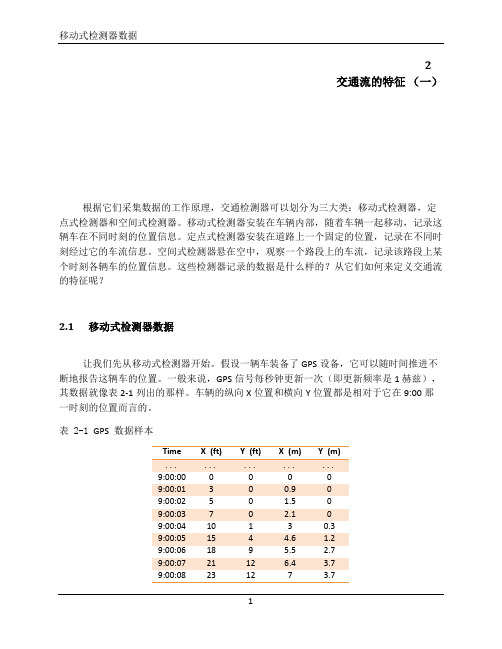
图 2-3 定点式检测器数据 4
定点式检测器数据 ������ = ������ ������
车头时距ℎ������ 定义为连续两辆车的车头(或车上同一参考点)通过同一观察点的时间 间隔,并以如下公式计算: ℎ������ = ������������ − ������������−1 如果忽略第一辆车和最后一辆车的不完整车头时距,观测时段 T 可以表示为:
tion
tioff
时间, t
图 2-4 感应线圈检测器数据
5
定点式检测器数据
当一辆车的前保险杠进入感应线圈检测器的检测区时,根据电磁学原理,检测器就 会产生一个信号。当这辆车的后保险杠驶出检测区时,该信号就会消失,如图所示。如果 我们设定一个合适的阈值,这个检测器就会输出两个信号:当车辆轧过线圈,输出是“开 (ON) ”信号,否则输出是“关 (OFF) ”信号。当线圈输出是“开”时,我们称这个线圈处 于“忙”的状态。有了这些铺垫,我们就可以来回顾一下以前定义的交通流特征,并定义 更多的交通流特征。 车流计数������:当出现“ON”状态时,检测器会有一个上升沿和一个下降沿,我们只 需要前后一致地数其中一个跃变就可以得到车流计数。 车头时距 ℎ������ :如果我们取所有车辆上同一个点为参考点(比如说前保险杠),第 ������������ ������ − 1 辆车和 ������ 辆车之间的车头时距可以表示为ℎ������ = ������������������������ − ������������−1 ,它们之间的时间空档可以 ������ ������������ ������������������ 表示为������������ = ������������ − ������������−1 。 “开”时段 ������������ :从一辆车的前保险杠进入检测区域到其后保险杠驶出检测区域所持 续的时间 ������������ = ������������������������������ − ������������������������ 。 车速 ������̇ ������ :在“开”时段内,车辆 ������ 行驶的距离是 ������ + ������������ ,其中 ������ 是线圈的宽度(通 常为 6 英尺或 1.8 米),������������ 是这辆车的长度。因此,这辆车在观测点时的即时速度可以如 此计算: ������̇ ������ = ������ + ������������ ������ + ������������ = ������������������ ������������ ������������ − ������������������������
05交通工程学 第五讲 交通流理论-流密速三参数基本关系
Traffic Engineering
叶彭姚 博士
交通运输与物流学院 西南交通大学 2011.3
第五讲 交通流理论
-流密速三参数基本关系 §5-1 交通流特性 §5-2 概率统计模型 §5-3 排队论模型 §5-4 跟驰模型 §5-5 流体动力学模拟
交通流理论概述
交通流理论是交通工程学的理论基础;
拥挤区 不拥挤区 Vm 速度V(Km/h) E
A
Vf
4.1 交通流特性
4.1.3 间断流特征
1. 信号间断处交通流特征
1 车头时距 2 3 4 5 6 7 8
h
t1
t2
t3
t4
t5
车队中的车辆
4.1 交通流特性
4.1.3 间断流特征
2. 关键变量及其定义
饱和车头间距 饱和交通量比率(饱和流率) 启动损失时间:Σ超时 净损失时间:最后一辆车越过停车线至下一 次绿灯启亮之间的时间。
Qm 流量Q(辆/h)
B
Vc=Vm VD D
流量(辆/h)
不拥挤区 A Km 拥挤区 E
Kj
密度K(辆/km)
4.1 交通流特性
4.1.2 连续流特征
2. 数学描述
3)流量与速度的关系 (利用Greenhields线性模型)
Qm 流量Q(辆/h) B Kc=Km D C
KD
流量(辆/h)
它是运用物理学和数学的方法来描述交通特性 的理论,它用分析的方法阐述交通现象及其机 理,使我们能更好地理解交通现象及本质;
研究交通流理论的意义 ——把握交通流运动机理与规律,科学地分析 交通设施设计效果与运营管理系统