60吨焊接变位机设计
焊接变位机设计毕业设计
焊接变位机设计毕业设计焊接变位机设计毕业设计随着工业自动化的快速发展,焊接技术在制造业中扮演着重要的角色。
为了提高焊接过程的效率和质量,许多企业开始引入焊接变位机。
焊接变位机是一种能够自动调整焊接工件位置的设备,可以实现焊接过程中的自动化操作。
本文将探讨焊接变位机的设计原理和关键技术。
一、焊接变位机的设计原理焊接变位机的设计原理主要包括三个方面:机械结构设计、控制系统设计和安全系统设计。
1. 机械结构设计焊接变位机的机械结构设计是整个设备的基础。
它需要考虑到焊接工件的尺寸和形状,以及焊接工艺的要求。
通常,焊接变位机采用多轴机械结构,可以实现多方向的运动和旋转。
同时,机械结构的刚性和稳定性也是设计的关键因素,以确保焊接过程中的精度和稳定性。
2. 控制系统设计焊接变位机的控制系统设计主要包括运动控制和焊接控制两个方面。
运动控制主要负责控制焊接变位机的运动轨迹和速度,以实现焊接工件的精确定位。
焊接控制主要负责控制焊接参数,如焊接电流、电压和速度等,以确保焊接质量。
同时,控制系统还需要与上位机进行通信,实现远程监控和数据传输。
3. 安全系统设计焊接变位机的安全系统设计是保证操作人员和设备安全的重要组成部分。
它主要包括防护装置、急停按钮和安全传感器等。
防护装置可以防止操作人员接触到焊接工件和焊接设备,减少事故的发生。
急停按钮可以在紧急情况下迅速停止设备的运动。
安全传感器可以监测设备的运动状态和环境参数,及时发出警报。
二、焊接变位机的关键技术焊接变位机的设计涉及到多个关键技术,包括运动控制技术、焊接技术和传感技术等。
1. 运动控制技术运动控制技术是焊接变位机实现精确定位和运动轨迹控制的关键。
常用的运动控制技术包括伺服控制和步进控制。
伺服控制可以实现高精度和高速度的运动控制,适用于对精度要求较高的焊接工艺。
步进控制可以实现较低成本的运动控制,适用于对精度要求较低的焊接工艺。
2. 焊接技术焊接技术是焊接变位机实现焊接过程的关键。
焊接变位机的设计(全套图纸)
本次设计是以焊接变位机作为主要的研究对象。
在焊接变位机中采用全液压系统,使之重量减轻,自动化程度增强,变位机中的传动部分是由一个油泵机组分别驱动油马达和三组油缸带动工作台进行回转和倾斜,并使主,副臂产生俯仰动作调节工作台的高低。
本次设计对焊接变位机的传动机构的特点和组成都做了详细的介绍,对机构中的主要零部件做了具体的设计。
本次设计采取了独特的设计,使得产品更为先进、实用,设计后制造出来的焊接变位机主要应用在焊接行业上,这样可以缩短焊接辅助时间,提高工人的劳动生产率,减轻工人劳动强度,改善焊接质量,并充分发挥各种焊接方法的效能。
在焊接生产中,经常会遇到焊接变位以及选择合适的焊接位置的情况,针对这一实际需要,我们设计的焊接变位机,它可通过工作台的回转和倾斜,使焊缝处于易焊位置。
焊接变位机与焊接操作机配合使用,可实现焊接的机械化、自动化,提高了焊接的效率和焊接质量。
焊接变位机可应用于化工、锅炉、压力容器、电机电器、铁路交通、冶金等工业部门的自动焊接系统。
关键词:焊接变位机;液压系统;回转;倾斜;The design is subject to weld change site equipment .The weld change site equipment,which the hydraulic system been used to lighten its weight and achieve highly automatically. The transmission part of the equipment is powered by one group of oil pump,several hydraulic motor and three hydrocylinder drive the work table to achieve rotation, incline and vice-arm to adjust work table height. The detailed system feature and components have been introduced in this design to emphasis the cutting edge and reality feature, which been enhanced by the specialty design of its major component. Weld change site equipment is mainly for welding industry to reduce the welds the assistance period, enhance work efficiency, reduce utility of labour and improve quality of welding. Most importantly, weld change site equipment could enhance the effect of almost every sort of welding。
台式焊接变位机设计说明书
台式焊接变位机设计说明书第一章焊接变位机械性能及结构1.1 焊接变位机械概述焊接变位机械是改变焊件、焊机或焊工位置来完成机械化、自动化焊接的各种机械装置。
焊接变位机械可分为三大类:(1)焊件变位机械:包括焊接变位机、焊接滚轮架、焊接回转台和焊接翻转机。
(2)焊机变位机械:包括焊接操作机和电渣焊立架。
(3)焊工变位机械:包括焊工升降机等。
焊接变位机(positioner)是将工件回转、倾斜,使工件上的焊缝置于有利施焊位置的焊件变位机械。
它主要用于机架、机座、法兰、封头等非长形工件的翻转变位和焊接,也可用于装配、切割、检验等。
焊接滚轮架(turning rolls)是借助主动滚轮与工件之间的摩擦力带动筒形工件旋转的焊件变位机械。
它主要用于筒形工件的装配与焊接,是锅炉容器生产中的常用工艺装备。
焊接回转台(welding turntable)是一种简化的变位机,它将工件绕垂直轴回转或者固定某一角度倾斜回转,主要用于回转体工件的焊接、堆焊与切割。
焊接翻转机(welding tilter)是将工件绕水平轴转动或倾斜,使之处于有利装焊位置的焊件变位机。
它主要适用于梁柱、框架、椭圆容器等的焊接。
焊接操作机(manipulator)的作用是将焊机机头准确地送到并保持在待焊位置,或以选定的焊接速度沿规定的轨迹移动焊机机头。
焊接操作机与变位机、滚轮架等配合使用,可完成纵缝、环缝、螺旋缝的焊接,还可以用于自动堆焊、切割、探伤、打磨、喷漆等作业。
1.2 焊接变位机械具有的性能1)焊件变位机械和焊机变位机械要有较宽的调速范围,稳定的焊接运行速度,以及良好的结构刚度。
2)对尺寸和形状各异的焊件,要有一定的适用性。
3)在传动链中,应具有一级反行程自锁传动,以免动力源突然切断时,焊件因重力作用而发生事故。
4)与焊接机器人和精密焊接作业配合使用的焊件变位机械,视焊件大小和工艺方法的不同,其到位精度(点位控制)和运行轨迹精度(轮廓控制)应控制在0.1~2mm之间,最高精度应可达0.01mm。
焊接变位机技术说明书、技术方案、技术协议、技术标书
焊接变位机技术说明书供方:XXXX 公司需方:XXXX 公司20XX 年XX 月XX 日关键词: 焊接变位机技术说明书-技术方案-技术协议-技术标书关键词: 焊接变位机技术说明书-技术方案-技术协议-技术标书目录一、设备内容二、系统工程技术资料三、必要的动力电源四、工程进度打算五、安装调试六、培训打算及要求七、验收八、质保期—.下表所列的内容为 XXX 负责供给或制造的设备内容序号名称规格数量品牌备注1变位机 11.1 主动箱〔气动〕200KG 11.2 从动箱 1 XXX1.3 翻转工作台1450X68811.4 底座 12电控系统 1 XXX变位机布置示意图二.工程技术资料⏹焊接工件要求⏹材质:碳钢⏹工件重复定位尺寸精度需能保证焊缝位置误差小于0.5mm。
⏹工件状态:工件圆柱度及工件全都性误差应在0.5mm以内。
⏹外表状态:工件外表无毛刺、无由污、无涂层等外表附着物及其他异物。
〔注:如以上条件不能满足,如焊接节拍、焊接品质等内容应做相应变动〕缓冲器1齿条齿轮.主轴缓冲器2气缸⏹ 气动变位机说明⏹ 系统底座及变位机箱体、翻转台均由碳钢及型材拼焊接而成,扎实稳定。
⏹ 气动回转方式可实现工件在 0°和 180°两个角度的焊接,气动翻转机构重复定位精度高±0.1°,翻转中心与承载物体的重心小于 100mm 时, 气动翻转台最大可承载 200 公斤。
⏹ 变位机驱动承受气缸+周密齿轮齿条副+直线导轨, 实现工件正反面焊缝一次焊接完成,提高生产效 降低工人的劳动强度。
〔详见右图〕⏹ 翻转工作台夹具定位间距承受一个螺纹孔与一个定位销孔穿插定位的定位方式,可便利夹具的更换及定位的准确。
〔详见以下图〕工作台定位示意图。
焊接变位机课程设计报告
目录1.设计方案确定……………………………………………………………………………………1.1设计要求、技术要求……………………………………………………………………….1.2回转机构的确定…………………………………………………………………………….1.3倾斜机构的确定…………………………………………………………………………….1.4机构预期寿命估算………………………………………………………………………….2.回转机构设计……………………………………………………………………………………2.1回转轴强度计算…………………………………………………………………………….2.2根据回转轴直径及受力情况选择轴承…………………………………………………….2.3设计回转轴结构尺寸、选择键…………………………………………………………….2.4回转机构驱动功率计算及电机选择……………………………………………………….2.5设计回转轴减速机构……………………………………………………………………….2.6回转主轴受力分析及校核,轴承校核…………………………………………………….3.倾斜机构设计. …………………………………………………………………………………3.1方案确定… ………………………………………………………………………………3.2最大倾斜力矩计算… ……………………………………………………………………3.3V带传动…… ………………………………………………………………………………3.4涡轮蜗杆传动………………………………………………………………………………3.5扇形齿轮机构………………………………………………………………………………3.6倾斜轴及轴承设计…………………………………………………………………………4.总结… ………………………………………………………………………………………......参考文献1.设计方案确定图1-11.1设计要求、技术要求表1-1设计要求、技术要求工作台回转工作台倾斜载重量回转速度倾斜速度工作台尺寸重心高度偏心距工作台倾斜角度电机驱动电机驱动660Kg 0-1r/min 0-1r/min φ700mm340mm 200mm 0-135°1.2回转机构的确定由于工作台回转速度低,调速范围长,额定功率低,所以选择直流电动机;因为总传动比较大,故可选择外购一个减速器及涡轮蜗杆机构,选用一级齿轮。
焊接变位器设计指导书
座式焊接变位器设计1.焊接变位机械的分类及应用焊接变位机械是改变焊件、焊机或焊工空间位置来完成机械化、自动化焊接的各种机械设备。
根据焊接变位机械的作用可以分成三大类:1) 焊件变位机械,如焊接变位机、滚轮架、回转台、翻转机;2) 焊机变位机械,焊接操作机;3) 焊工变位机械,焊工升降台。
使用焊接变位机械可缩短焊接辅助时间,提高劳动生产率,减轻工人劳动强度,保证和改善焊接质量,并可充分发挥各种焊接方法的效能。
2.焊接变位机作用焊接变位机是焊件变位机械中的一种,利用它在焊接作业中将焊件回转并倾斜,使焊接上的焊缝置于有利施焊位置,完成手工焊接和自动焊接的作业。
焊接变位机主要用于机架、机座、法兰、封头等非长形焊件的翻转变位。
在手工焊中,焊接变位机可以把工件回转并倾斜,使焊缝处于水平焊或船形焊位置,从而减轻工人劳动强度,保证焊接质量;也可以利用焊接变位机进行自动焊接操作,完成一些圆环焊缝的焊接;另外,可以把焊接变位机与弧焊机器人相结合(柔性加工单元FMC ),完成一些曲面、复杂的焊缝的焊接。
焊接变位机按结构形式可分为三种:1) 伸臂式焊接变位机;2) 座式焊接变位机;3) 双座式焊接变位机。
焊接变位机出三种基本结构形式外,还有很多派生形式,有些变位机的工作台还具有升降功能。
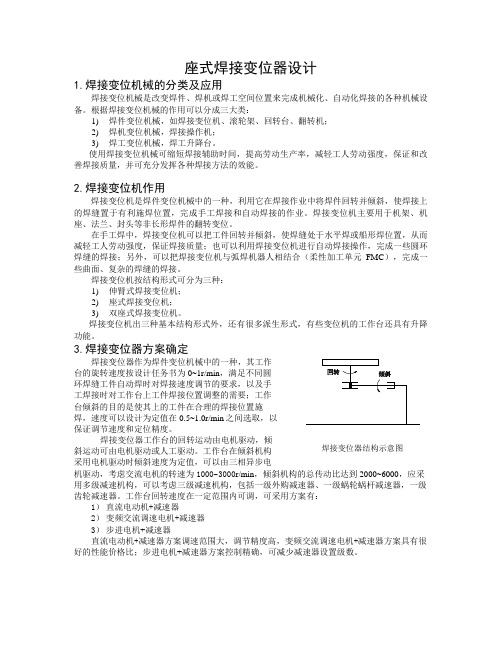
3.焊接变位器方案确定焊接变位器作为焊件变位机械中的一种,其工作台的旋转速度按设计任务书为0~1r/min ,满足不同圆环焊缝工件自动焊时对焊接速度调节的要求,以及手工焊接时对工作台上工件焊接位置调整的需要;工作台倾斜的目的是使其上的工件在合理的焊接位置施焊,速度可以设计为定值在0.5~1.0r/min 之间选取,以保证调节速度和定位精度。
焊接变位器工作台的回转运动由电机驱动,倾斜运动可由电机驱动或人工驱动。
工作台在倾斜机构采用电机驱动时倾斜速度为定值,可以由三相异步电机驱动,考虑交流电机的转速为1000 3000r/min ,倾斜机构的总传动比达到2000~6000,应采用多级减速机构,可以考虑三级减速机构,包括一级外购减速器、一级蜗轮蜗杆减速器,一级齿轮减速器。
60吨焊接变位机设计

60吨焊接变位机设计焊接变位机是一种用于工业生产中焊接工序的设备,具有移动功能,用于方便进行焊接操作。
本文将对60吨焊接变位机的设计进行详细讨论。
首先,60吨焊接变位机的设计需要考虑其结构强度和稳定性。
焊接变位机通常由底座、立柱、横梁和工作台组成。
底座应选用高强度钢材进行制作,以确保整个设备的稳定性和承重能力。
立柱和横梁的材料也应该具备较高的强度和刚度,以支撑和固定工作台。
同时,在设计中还需考虑到设备的移动性,为变位机安装脚轮,以便于移动和定位。
其次,焊接变位机的操控系统也是设计中需要重点考虑的方面。
合理设计变位机的操控系统,可以有效提高工作效率和操作便利性。
操控系统应包括人机界面、传感器、控制器和执行器等部分。
通过合理配置这些部分并进行集成,能够实现方便、准确的焊接操作。
例如,可以使用触摸屏界面设计直观易用的人机界面,并利用传感器实时监测焊接变位机的位置和状态,通过控制器对执行器的运动进行精确控制。
另外,焊接变位机的工作台设计也是非常重要的。
设计合理的工作台可以提高工作效率和焊接质量。
工作台需要具备足够的承重能力和稳定性,以适应60吨焊接工件的焊接需求。
为了方便焊接操作,工作台的高度应可调节,以适应不同工件的需求。
此外,工作台还应具备良好的刚性和稳定性,以确保焊接过程中的稳定性。
在工作台上,可以安装夹具和夹具卡具等附属设备,以固定工件和提高工作效率。
在进行焊接变位机的设计时,还应考虑安全性。
焊接工作存在一定的安全风险,因此焊接变位机的设计应符合相关的安全标准和规范。
设计中可以考虑加装保护罩、安全传感器和紧急停机装置等安全设备,以减少事故的发生,并保障操作人员的安全。
总之,设计60吨焊接变位机需要考虑结构强度和稳定性、操控系统、工作台设计以及安全性等多个方面。
通过合理的设计和配置,可以实现高效、准确和安全的焊接操作。
焊接变位机计算书
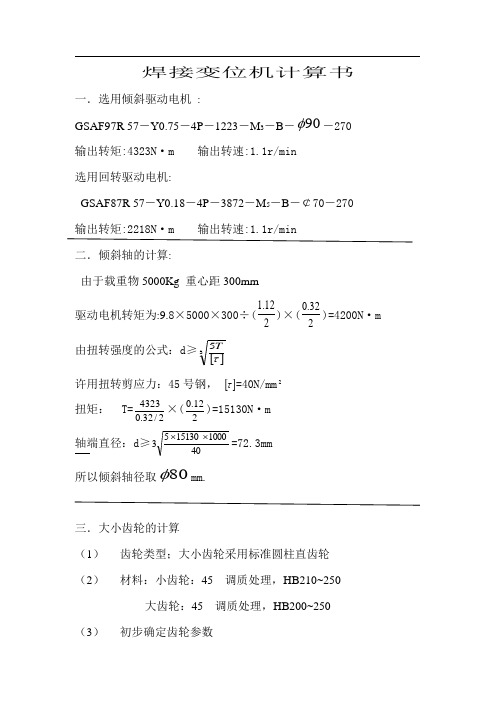
焊接变位机计算书一.选用倾斜驱动电机 :GSAF97R 57-Y0.75-4P -1223-M 3-B -90φ-270 输出转矩:4323N ·m 输出转速:1.1r/min 选用回转驱动电机:GSAF87R 57-Y0.18-4P -3872-M 5-B -¢70-270 输出转矩:2218N ·m 输出转速:1.1r/min 二.倾斜轴的计算:由于载重物5000Kg 重心距300mm驱动电机转矩为:9.8×5000×300÷(212.1)×(232.0)=4200N ·m由扭转强度的公式:d ≥[]35τT许用扭转剪应力:45号钢, []τ=40N/mm 2 扭矩: T=2/32.04323×(212.0)=15130N ·m 轴端直径:d ≥4010001513053⨯⨯=72.3mm所以倾斜轴径取80φmm.三.大小齿轮的计算(1) 齿轮类型;大小齿轮采用标准圆柱直齿轮 (2) 材料:小齿轮:45 调质处理,HB210~250大齿轮:45 调质处理,HB200~250(3) 初步确定齿轮参数1) 按接触强度初步确定中心距a由图14-1-21c 查得1Hlfm σ=610N/mm 2(HB=210) ,lim H σ=600 N/mm 2(HB=200)小齿轮传递的扭矩:T 1=4323N ·m齿宽系数:参考表14-1-62选取d φ=1d b=32090=0.281 ,φa =ab =90/720=0.13取综合系数,K=1.4,由接触强度的公式: a=484×(3.5+1) 3l i m 21uKT H a σφ=484×4.535.360013.043234.12⨯⨯⨯=725mm 取a=720mm2)初步确定模数m ,齿数z ,分度圆直径d ,齿宽b 参考表14-1-3,取m n =0.01a=0.01×720=7.2mm 取m n =8mm,Z 1=40,Z 2=uZ 2=3.5×40=140 由接触强度的公式:d 1=7683)1(l im 21uu KT Hd σφ+=768×35.360028.0)15.3(43234.12⨯⨯+⨯⨯=327mm圆整取d 1=320mm,d 2=1120mm. b 1=90mm,b 2=80mm.3)初校弯曲强度;由弯曲强度的公式查图得1Flfm σ=240N/m 2(HB=210) 2Flfm σ=220N/mm 2(HB=200) Y 1Fa =2.4 Y 2Fa =2.16 d φ=0.28m=12.13211dF alFlfmZ Y KT φσ=12.1328.0402204.243234.12⨯⨯⨯⨯=6.39mm现选用m n =8mm .所以弯曲强度初校通过。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词:焊接变位机;机械设计;焊接辅机
Abstract
Welding positioner is a kind of welding auxiliary equipment,it was known as the three planes in welding auxiliary equipment with welding manipulator,welding roller bed.Welding positioner was designed with the development of welding industry mechanization,and automation.As a welding auxiliary machine,welding positioner was used in pipe′s landscape orientation welding,pipe and flange′s inside and outside central linking welding,pipe welding in all location.Though the gyration and retroflexion of the workbench,the welding positioner can make the welding line to an ideal position,which can improve the quality of the welded joint,reduce welder’s workload.It is ideal equipment especially fit to weld the kinds of workpiece,just like the shaft,tray,canister,and so on.
我国引进的焊机器人柔性加工单元中的变位机,也是针对特定产品研制的,因此价格较昂贵,而技术培训及售后服务却不理想。在技术方面,我国许多工厂引进的弧焊机器人系统己具有机器人与变位机协调运动的功能。这对一些空间曲线或较复杂的焊缝可以始终保持在最佳位置下进行焊接,以提高焊接质量,并能一次起弧就焊完整条焊缝,以提高效率。但是有关技术却往往为外方厂家所垄断,我们并不掌握。从提高我国焊接生产机械化与自动化水平的角度出发,必须加大科研投入,研制高性能的焊接机器人与配套变位设备,力求在自动化焊接领域在国际上占有一席之地。
By understanding the welding positioner′sdevelopment in domestic and overseas,and the positioner used in welding robot is described in thepaper. Ablock60tons of welding positioner is designed.Mainly on the subject of welding ,mechanical rotation turnover of control, the electrical options, reducer selection, various axle and the wheel bearings and determine accuracy ,and so on.
班级:
学号:
作者姓名:
2013年5月25日
无锡太湖学院
信机系机械工程及自动化专业
毕业设计论文任务书
一、题目及专题:
1、题目60吨焊接变位机设计
2、专题
二、课题来源及选题依据
本课题来自无锡华联精工机械有限公司的生产实际。目前机械行业,特别是锅炉行业有大量的管和板的焊接,管子和板的接合处为环缝焊接,为适应自动焊接,管与板要自转,同时要倾斜45度,满足船形焊接,要求设计该焊接变位机。
本设计分析了解国内外焊接变位机的发展状况、以及焊接变位机在焊接机器人中的应用,设计了一种60吨座式焊接变位机。主要内容是关于焊接时机械的回转翻转的控制、电机的选择、减速器的选择、各个轴和齿轮轴承的确定以及校核等等。
设计的具体过程是根据预定的载荷和要求的焊接速度从而确定设备所需要的电机类型,包括:电机的转速、额定功率、电压电流等,在此基础上计算轴的尺寸和相应配件的型号,并且对其进行相关的强度、使用寿问):
指导教师签名
签名
签名
教研室主任
〔学科组组长研究所所长〕签名
系主任签名
2012年11月12日
摘
焊接变位机是一种焊接辅助设备,它与焊接操作机、焊接滚轮架并称为焊接辅助设备中三大机。焊接变位机是应焊接行业的机械化、自动化发展需要而产生的。焊接变位机作为一种焊接配套设备,用于管子横向对接焊接,管子与法兰内外环缝焊接,管子对管子全位置焊接。焊接变位机可水平翻转角度,通过工作台的回转及翻转运动使工件上焊缝处于最理想的位置进行焊接,从而大大提高焊缝质量,减轻焊工劳动强度,尤其是适合焊接各种轴类、盘类、筒体等回转工件的理想设备。
编号
无锡太湖学院
毕业设计(论文)
题目:60吨焊接变位机设计
信机系机械工程及自动化专业
学号:
学生姓名:
指导教师:
2013年5月25日
无锡太湖学院本科毕业设计(论文)
诚信承诺书
本人郑重声明:所呈交的毕业设计(论文)60吨焊接变位机设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
三、本设计(论文或其他)应达到的要求:
①分析并了解焊接变位机的基本结构,熟悉焊接变位机的具体工作原理;
②完成整机的具体方案设计;
③完成各个零部件的结构设计,并绘制相应的三维模型及二维图纸;
④将三维模型进行装配,并绘制相应的二维装配图。
四、接受任务学生:
班姓名
五、开始及完成日期:
自2012年11月12日至2013年5月25日