一种用于电力系统仿真的水轮机非线性模型
650 MW水轮机调节系统非线性模型研究
650 MW水轮机调节系统非线性模型研究赵盛萍;赵明;梁俊宇;金秀章;李璟瑞【摘要】近年来随着水电的快速发展,各水电站都以大型机组为主,但现有的大部分水轮机调速系统的模型都是针对小机组建立的.重点分析了液压随动系统、引水系统及水轮机存在的非线性因素,建立了650MW机组的非线性模型.在Matlab/Simulink中搭建了相应的水轮机调节系统非线性仿真模型,并根据云南省某水电厂650MW机组进行了参数设置,通过仿真实验验证了该模型的准确性.【期刊名称】《能源研究与信息》【年(卷),期】2014(030)001【总页数】4页(P39-42)【关键词】水轮机;调节系统;非线性模型;仿真【作者】赵盛萍;赵明;梁俊宇;金秀章;李璟瑞【作者单位】华北电力大学云南电网公司研究生工作站,云南昆明650217;华北电力大学,河北保定071003;云南电力试验研究院(集团)有限公司电力研究院,云南昆明650217;云南电力试验研究院(集团)有限公司电力研究院,云南昆明650217;华北电力大学,河北保定071003;云南电力试验研究院(集团)有限公司电力研究院,云南昆明650217【正文语种】中文【中图分类】TV136中国水能蕴藏量1万kW以上的河流有300多条,水能资源丰富程度居世界第一.水资源总量约2.8万亿m3,约占全世界水资源总量的6%,可开发量为3.78亿kW.和世界其它国家相比中国水能利用情况处于较低水平.随着煤炭等不可再生资源的过度开采,水能这种绿色、可持续的发电能源必将得到大力开发,大型水电站也必将相继投入运行,对运行人员的有效培训也将进一步加强,这就需要建立更加完善的模型来建立水电站的仿真培训系统[1].同时,水电站孤网运行,水电厂和风电、火电的联调也需要建立能够更好地模拟大波动过程的仿真模型.本文通过分析水电站调节系统存在的非线性因素,对相关部分分别建立非线性模型,将各部分组合,得到完整的调节系统非线性模型.在Matlab/Simulink软件中建立其模型,验证模型的准确性.1 水轮机调节系统结构水轮机调节系统包括调速器和调节对象,如图1所示.电厂常用的调速器是微机调速器,调节对象主要包括水轮机及其引水系统和发电机.为了简化分析,以混流式水轮机为例.水轮机动态特性指调节过程中水轮机力矩Mt、流量Q随导叶开度α、水头H和转速n变化的特性[2],即图1 水轮机调节系统结构图Fig.1 Turbine regulating system structureMt=Mt(α, H, n)(1)Q=Q(α, H, n)(2)非线性水轮机模型中考虑了在大波动过程中机组变化比较大,传递函数不能恒定为常数的特点.水轮机力矩和流量用积分形式表达,即(3)(4)式中:y为接力器行程;ex为水轮机动力矩对机组转速的传递函数;ey为水轮机动力矩对接力器行程的传递函数;eh为水轮机动力矩对水头的传递系数;eqx为水轮机流量对转速的传递系数;eqy为水轮机流量对导叶开度的传递函数;eqh为水轮机流量对水头的传递系数;h为水头的偏差相对值.2 非线性因素分析2.1 调速器分析机组执行机构为数字控制,由综合放大环节、电液伺服环节(比例阀)、配压阀以及主接力器等构成.建立更加符合现场实际的模型需注意:(1) 考虑现场实际中的非线性情况:转速、导叶开度均有实际的物理意义和取值范围;并加入了限速、限幅的饱和非线性环节.(2) 考虑到实际情况中,开启和关闭时接力器的机械动作特点不同,开启和关闭时接力器反应时间常数也不同.所以建立液压随动系统模型时要考虑这一点,开启和关闭时选择不同的接力器反应时间常数.在常用机械液压随动系统基础上,结合以上两点,建立的液压随动系统模型如图2所示.其中:u为输入变量;t为时间;Kp、Ki、Kd均为调节器参数;To、Tc分别为开启和关闭的时间常数;T2为惯性时间常数;Pmax、Pmin为速度的上限和下限;s为复变量.2.2 水轮机分析水轮机是一个复杂的时变非线性系统,目前还没有公认的表达式可描述它的流量特性和力矩特性.本文根据水力机械的主要参数及模型单位参数间的关系,搭建非线性水轮机模型,其中无法用数学模型表达的关系就借助水轮机转轮特性曲线查表得到[3-4],则有图2 液压随动系统模型Fig.2 Hydraulic servo system model(5)Mt=9.η(6)(7)式中:n11、Q11分别为水轮机单位转速和单位流量;D为水轮机转轮直径;η为水轮机机械效率.在仿真分析中,变量均以相对偏差值表示,但是在水轮机特性表中变量的形式是相对值或全量值,所以在查表Q11=f(n11,α)和表η=f(n11,α)之前要将相对偏差值转换为全值量[5-6].变量对应关系如表1所示.根据式(3)和表1可在Matlab/Simulink软件中得到水轮机非线性仿真模型,如图3所示.其中:h0、n0、y0分别为水头、转速、接力器行程的初始值.通过输入导叶开度和单位转速查表得到相应的水轮机流量和机组效率.表1 变量对应关系Tab.1 Correspondence between variables参数名称偏差相对值全量值转速x=n-n0nrn=n0+xnr流量q=Qt-Q0QrQ=Q0+qQr水头h=H-H0HrH=H0+hHr力矩m=Mt-M0MrMt=M0+mMr接力器行程y=Y-Y0YmY=Y0+yYm表1中,nr、Qr、Hr、Mr分别为额定工况下的转速、流量、水头和力矩;Q0、H0、M0、Y0分别为初始工况下的流量、水头、力矩和接力器行程;Y、Ym分别为接力器行程和接力器行程的最大值;x、q、h、m、y分别为转速、流量、水头、力矩、接力器行程的偏差相对值.图3 流量特性和力矩特性模型Fig.3 Flow characteristic and torque characteristic model3 水轮机调节系统非线性仿真模型水电站的调速器都是选用PID调节模块,但是考虑到现场频率的反馈信号与发电机出口的频率信号相比存在延迟和滤波,信号在传输过程中有一些变化,所以结合某水电站机组的调速器模型在反馈信号中加入一阶微分环节,模拟这种影响.得到的水轮机调节系统非线性模型如图4所示.4 甩负荷仿真实验选定云南省某水电站机组作为对象进行仿真.在水头为169 m,导叶开度为92%,带有功功率为73%时进行甩负荷仿真实验,控制器的参数设置为:主环PID参数中调节器参数分别为Kp=4,Ki=1,Kd=0.1,永态转差系数bp=0.040 4;副环PID参数中调节器参数分别为Kp=8.38,Ki=0,Kd=0,接力器动作时间Ty=To=18.74 s;被控对象模型参数中水流惯性时间常数Tw=1.6,发电机惯性时间常数Ta=10,发电机负荷自调节系数en=1.甩负荷仿真实验结果如图5所示.甩负荷过程中系统波动较大,这是由于甩负荷时要求频率保持在额定值(50 Hz),所以发电机转速和频率的变化幅度较大,运用非线性模型能够更好地模拟这一过程.但是由于本文建立的非线性模型用到的二维查表法是一线性插值方法,其精度不高,因此该模型还需要进一步优化、完善.图4 水轮机调节系统非线性模型Fig.4 Nonlinear turbine regulating system model图5 甩负荷仿真实验结果Fig.5 Load rejection simulation results5 结束语对水电站调节系统存在的非线性因素进行了分析.首先,水轮机是调节系统非线性的最大来源,所以本文在水轮机综合特性曲线中水轮机特性关系的基础上建立了水轮机非线性模型;其次,由于信号反馈中存在惯性和延迟,阀门开启和关闭等动作存在死区和限幅,因此增加了相应的非线性环节.在Matlab/Simulink软件中搭建仿真模型,各部分的传递函数和参数设定参考了云南某水电站650 MW机组的实际情况.通过仿真实验证明了模型的准确性,为今后建立大机组水轮机调节系统准确、可靠模型提供了参考.参考文献:[1] 蔡晓峰,张新龙,张雷,等.浅谈中国水轮机调速器电气控制器的发展[J].水电厂自动化,2010,31(1):20-22.[2] 程远楚,张江滨.水轮机自动调节[M].北京:中国水利水电出版社,2010.[3] 李咸善,朱建国,胡翔勇,等.基于大系统解耦的水电站实时仿真模块化建模[J].三峡大学学报(自然科学版),2005,27(4):309-313.[4] 徐枋同,陈建.水力机组动态模型在线辨识[J].水利学报,1988(3):28-36.[5] 曾玉,邓长虹,胡翔勇,等.一种用于电力系统仿真的水轮机非线性模型[J].武汉水利水电大学学报,2000,22(1):55-58.[6] 魏守平,伍永刚,林静怀.水轮机调速器与电网负荷频率控制(一)水轮机控制系统的建模及仿真[J].水电自动化与大坝监测,2005,29(6):18-22.。
电力系统仿真计算用水轮机建模技术研究
使用 条件 :< E 6 0 <  ̄E< 3  ̄/< 及 . T/ 2 5
21 . 3 弹 性 水 击 模 型 .
实 际上 由于水 体和 管壁都 是有 弹性 的 ,在引水 管道 比较 长 的情况 下 .刚性水 击模 型将 引起较 大 的 误差 ,弹 性水击 效应 对整 个水 轮机及 其 调节 系统 引 起 的影响 是不 能忽 略 的 。
O 引 言
随 着 电 网 的快 速 发 展 以 及 各 大 区域 电 网的 形 成, 电力 系统 已进人 大 电网 、 大机 组 、 电压 的新 时 高 期 , 网规 划 、 和 管理对 分析计 算 的正确 性 与准 电 运行 确性 提 了更高要 求 ,而 电 网内各 部 分 的模 型及 参
:厂nn) _(,:
Q n n) ; ,
() 1
() 2
从 水 轮机模 型综 合特性 曲线 上可 以查 出相应 工 况点 的9 、 , , a r 由下 式得 到 : /
:9 5 =55
/ Z]
统建模技 术及 参数 测试 发展迅 速 ,目前各 区域 电网 已完成 了 网 内大型 机组 的模 型参数 实测 工作 。但在 原 动机及 调速 系统 的建模 与参 数实 测方 面发展 较缓
研 究 与 分 析
Y h JU Y E A ] I U F N X
电力 系统仿真计算 用水轮机建模 技术研 究
万天虎 , 李 华 , 安尤 晨
( 西 电力科 学研 究 院 , 西 西安 陕 陕 70 5 ) 1 0 4
力 矩特 性 , 没有 公认 的解 析式 描述 , 的动态运 行特 它
流十 + ^ e e eh y
作者简 介: 万天虎 ( 9 ( ) 重庆人 , I8卜 男, 硕士 , 从事水 电机组建模及参数测试方 面的工作。
水电站水力系统非线性动态模型仿真

水电站水力系统非线性动态模型仿真
孔繁镍;吴杰康
【期刊名称】《系统仿真学报》
【年(卷),期】2012(24)5
【摘要】针对水电站水轮机水力系统不同结构形式,应用牛顿运动定律,建立了单压力引水管水力系统非线性动态模型、调压室-压力引水管水力系统非线性动态模型、一管多机水轮机水力系统非线性动态模型,模型考虑了压力引水管水体摩擦损失、
调压室特性等因素对系统模型的影响。
基于MATLAB仿真环境建立了水电站水力系统非线性动态仿真模型,仿真模型动态仿真了不同水力系统结构的非线性动态模
型对水轮机输出功率及机组水头的影响,仿真结果表明:调压室-压力引水管系统非线性动态模型比单压力引水管系统非线性动态模型对水轮机输出功率影响大、输出功率震荡调节时间长;单压力引水管系统非线性动态模型可以近似看作一阶系统,调压
室-压力引水管系统非线性动态模型可以近似看作二阶系统。
一管多机系统中,机组输出功率、机组水头存在耦合影响,影响程度与机组水门相对开度有关。
【总页数】5页(P1072-1076)
【作者】孔繁镍;吴杰康
【作者单位】广西大学电气工程学院;广西民族大学信息科学与工程学院
【正文语种】中文
【中图分类】TM622
【相关文献】
1.基于非线性动态模型的开关磁阻电动机模糊控制系统仿真研究
2.开关磁阻电动机调速系统非线性动态仿真模型
3.基于神经网络非线性模型的开关磁阻电机调速系统动态仿真
4.可再生能源发电系统虚拟惯量动态控制仿真模型可再生能源发电系统虚拟惯量动态控制仿真模型
5.瞳孔控制系统的非线性特性及动态数学模型仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
灯泡贯流式双调节水轮发电机组调速系统建模与仿真

灯泡贯流式双调节水轮发电机组调速系统建模与仿真彭天波【摘要】以灯泡贯流式双调节水轮发电机组为例,首先进行调速系统参数现场测试,并经分析、整理后得出了水轮机调节系统各环节的重要参数,之后分别采用最小二乘法(LS)和基因遗传算法(GA)对原动机及调节系统建模和参数辨识.得到非线性"自定义"模型,并与电网稳定计算通用模型PSASP进行了比较分析,从而建立了水轮机调节系统在并网状态下的模型和数据,为电力系统仿真研究提供与实际系统状况相吻合的水轮机调节系统模型,满足了电力系统稳定计算的要求.【期刊名称】《水电站机电技术》【年(卷),期】2010(033)004【总页数】5页(P23-27)【关键词】灯泡贯流式机组;参数测试;调速系统建模;仿真【作者】彭天波【作者单位】湖北省电力试验研究院,湖北,武汉,430077【正文语种】中文【中图分类】TV734.4某航电枢纽工程1号机组为灯泡贯流式水轮发电机组,由东芝水电设备(杭州)有限公司生产,其主要设备参数如下:水轮机型号GZ(TB5003)-WP-691;最大功率16.980MW;额定功率15.432MW;最大水头8.4m;设计水头4.7m;最小水头1.5m;设计流量≤366.47m3/s。
发电机型号SFWG15-84-7300;额定容量16.67MVA;额定功率15MW;额定电压10.5kV;额定电流916.4A;额定频率50Hz;额定转速71.4r/min;飞逸转速240r/min;功率因素 0.9(滞后);转动惯量3000t·m2;惯性时间常数Tw6.13(额定水头)/2.06(最大水头)s。
调速器调节参数调整范围如下:比例增益 KP:0.5~20;积分增益 Ki:0.025~10;微分增益 Kd:0~40;永态转差率 bp调整范围:0~10%;人工转速死区调整范围:0~±0.3Hz;电气开限调整范围:0~100%“;频率给定”(数字给定)调整范围:45~55Hz;“功率给定”(数字给定)调整范围:0~100%。
水电站水机电系统仿真建模及动态特性分析
简化表示为
Gh(s)=Tw
T2ቤተ መጻሕፍቲ ባይዱs3
+24s 。
3T2rs2 +24
(2)
式中:Tw 为水流惯性时间常数;Tr为水击相长。
由式(1)可知,该模型存在 2个严重非线性环
节,即水轮机单位力矩特性函数 fM与单位流量特性 函数 fQ。由于该环节处理的好坏将直接影响到上述 水轮机非线 性 模 型 的 计 算 精 度,故 本 文 采 用 Ada
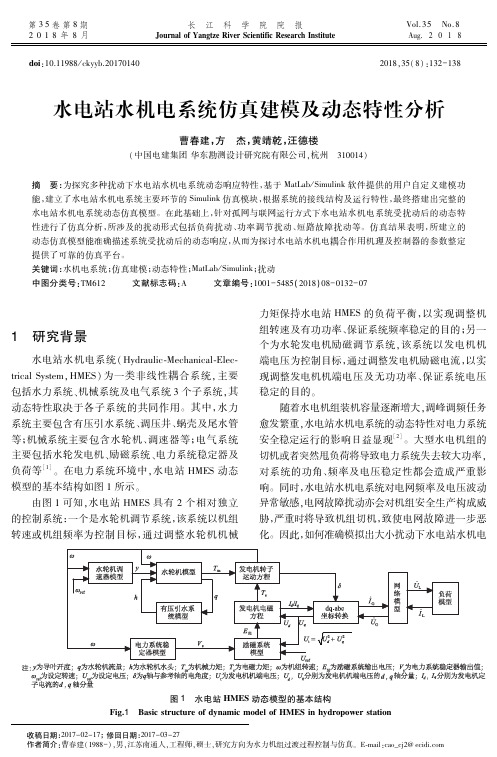
由图 1可知,水电站 HMES具有 2个相对独立 的控制系统:一个是水轮机调节系统,该系统以机组 转速或机组频率为控制目标,通过调整水轮机机械
力矩保持水电站 HMES的负荷平衡,以实现调整机 组转速及有功功率、保证系统频率稳定的目的;另一 个为水轮发电机励磁调节系统,该系统以发电机机 端电压为控制目标,通过调整发电机励磁电流,以实 现调整发电机机端电压及无功功率、保证系统电压 稳定的目的。
随着水电机组装机容量逐渐增大,调峰调频任务 愈发繁重,水电站水机电系统的动态特性对电力系统 安全稳定运行的影响日益显现[2]。大型水电机组的 切机或者突然甩负荷将导致电力系统失去较大功率, 对系统的功角、频率及电压稳定性都会造成严重影 响。同时,水电站水机电系统对电网频率及电压波动 异常敏感,电网故障扰动亦会对机组安全生产构成威 胁,严重时将导致机组切机,致使电网故障进一步恶 化。因此,如何准确模拟出大小扰动下水电站水机电
第 35卷 第 8期 2018年 8月
长 江 科 学 院 院 报 JournalofYangtzeRiverScientificResearchInstitute
doi:10.11988/ckyyb.20170140
Vol.35 No.8 Aug.2 0 1 8
复杂管系水轮机调节系统非线性建模与分析
霸_——_ __
J u n l fDr i a e a d Irg to c i e yEn i e rn o r a a n g n r ia i n Ma hn r gn e i g o
排灌 工程学 机械 报—— ■豳豳 I ——
复杂 管系水轮机调节系统非线性建模 与分析
t e r tc la a y i u lo d t r n d a p o r r n e o I p r mee s fr a t be o e n r Th h o eia n lss b tas ee mie rpe a g f P D a a t r o sa l g v r o . e no ln a y mi e a i r ft e g v r i g s se we e ca i e y u i g bf r a in d a r m ,P i n i e r d na c b h vo so h o e n n y tm r lrf d b sn i c to ig a i u on— c r p,p we p c r m ig a ,tme do i i ga ,p s r t i g a a d a s cr m i— a e ma o r s e tu d a r m i man d a r m ha e obi d a r m n pe tu da s ga r m.The e a ay i t o sa d r s lswi e us f lf ra lwi g a h d o p we tto n s f p — s n l ssmeh d n e u t l b e u lo n y r - o rsain i a e o e l o
关 键词 : 水轮 机 ; 节 系统 ; 调 非线性 分析 ; 复杂 管 系; 岔 分 中 图分 类号 :2 7 9 T 7 4 文献标 志码 : 文 章编 号 :17 8 3 ( 0 2 0 0 2 0 ¥7. ; V 3 A 6 4— 5 0 2 1 )4— 4 8— 8
基于非线性模型的水轮机调速系统智能辨识
上述方法 已编制成 软件包 ,用 于机组调 速系统 的 参数辨识 。该软 件包可 以具 有频域法 、时域法 、智能 法等 3 种辨识 方法供使 用者选择 ,具有 良好的可视化 人 机界面 ,使用 者根据实 际的调速 系统 ,通 过作 图的 方 法绘制出调速 系统模 型 ,设 定待辨识 的参数 ,就可 以一次辨识 出模型中各个环节待辨识 的参数值 。
录输入输 出以及中间量的数据 。 () 2 根据 电厂实际的水力情况 以及厂家提供 的调速 系统控制原理 图在 MA L B的 SMULNK下搭建与 T A I I 之相符合 的水 轮机及调速 系统 数学模 型,避 免模型本 身 的可辨识性问题 。 () 3设定模 型中的已知量和待辨识参数 ,根据相应 的厂家提供值或典型值设定合适 的搜索 范围。 () 4 设定遗传算法各个控制参数 。一般群体数和优 化代数均取为 3 ~5 ,交叉和变 异概率本文选 为 0 6 0 0 ,
充 分 考虑 了系 统 非 线 性 特 征 ,与 实 际 系 统 更 为 符 合 。
() 5给模型系统输入激励 阶跃信号 ,通过遗传算ห้องสมุดไป่ตู้ 寻找最优解 ,在达 到优 化代数最 大值后停止搜 索 ,将 本次搜索得到的最优解解码成 系统参数 代 回模 型系统
得 到仿真输出,与阶跃信 号所 对应 的实际系统输 出比 较 ,定量 比较 两者 的响应性 能指标 ,差 值足够 小,则 满足要求 ,得到的系统参数即为所求 。 () 6 若不满足要求则根据情况分析原 因,对模 型系 统或群体数 目,优化代数或参 数搜索 范围做相应 的修 正 ,重复辨识 ,直到得到满足要求的参数值。
电机技 术
一类非线性水轮机调节系统动力学模型的稳定性和Hopf分支研究

一类非线性水轮机调节系统动力学模型的稳定性和Hopf分支研究一类非线性水轮机调节系统动力学模型的稳定性和Hopf分支研究一、引言水轮机是一种常用的水能转换装置,广泛应用于水电站等能源领域。
在水轮机的运行过程中,其调节系统对于维持系统的稳定运行起着至关重要的作用。
研究水轮机调节系统的动力学特性,能够为水轮机的性能优化和安全运行提供理论指导。
本文将针对一类非线性水轮机调节系统的动力学模型,探讨其稳定性和Hopf分支特性。
二、问题描述考虑一个具有非线性特性的水轮机调节系统,其数学模型可以描述为如下形式:$$\begin{cases}\dot{x} = f(x, y) \\\dot{y} = g(x, y)\end{cases}$$其中,$x$和$y$分别表示系统的状态变量,$f(x, y)$和$g(x, y)$为非线性函数。
三、稳定性分析为了研究系统的稳定性,我们可以通过判断系统的状态变量是否收敛到某个稳定点来得出结论。
稳定点是系统状态变量不再变化的特殊点,可以通过求解系统的稳定点方程得到。
稳定点方程即令$\dot{x}=0$和$\dot{y}=0$,解得系统的稳定点$(\bar{x}, \bar{y})$。
接下来,我们可以通过线性化系统方程近似描述非线性系统的行为。
使用雅可比矩阵可以将系统方程线性化为如下形式:$$\begin{bmatrix}\delta \dot{x} \\\delta \dot{y}\end{bmatrix}=\begin{bmatrix}\frac{\partial f}{\partial x} & \frac{\partialf}{\partial y} \\\frac{\partial g}{\partial x} & \frac{\partialg}{\partial y}\end{bmatrix}\begin{bmatrix}\delta x \\\delta y\end{bmatrix}$$其中,$\delta x = x - \bar{x}$和$\delta y = y -\bar{y}$表示状态变量的偏差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!
!"!
数 学 模 型
水 轮 机 模 型
轮 机 的 稳 态 特 性 &!&!& 水 对 于 转 浆 式 水 轮 机 , 根 据 实 验 特 性 曲 线 , 可 将 力 矩 和 流 量 表 达 为 导 叶 开 度 、 轮 叶 开 度 、 单 位 转 速 、 水 头 的 函 数 ( !" # ! $ , % ) " !, ", ( & # & $ , % ) !, ", 但 目 前 尚 未 找 到 它 们 的 合 适 解 析 表 达 式 , 只 能 采 用 综 合 特 性 曲 线 或 列 表 函 数 两 种 方 法 来 描 述 ! 这
$ $ ) 0 $ , " , % , & ) ! ,( +" ! / ( 取 最 小 值 , 通 过 联 立 求 解 正 规 方 程 组 , 即 可 求 得 系 数 -’()* # 浆 式 水 轮 机 传 递 系 数 的 拟 合 多 项 式 描 述 !#!#& 转
水 轮 机 的 工 况 由 水 头 $ , 机 组 转 速 " , 导 叶 开 度 % , 轮 叶 开 度 & ’ 个 参 数 决 定 # 例 如 , 对 某 一 水 轮 机 把 它 分 成 : ( 水 头 ’) ( 转 速 )) ( 轮 叶 开 度 )) ( 浆 叶 开 度 *) , ( ( ( 共 !%%+ 个 子 区 域 , 利 用 差 分 法 求 得 各 子 区 域 的 传 递 系 数 !" , 关 于 传 递 系 数 的 详 细 求 !% , !& , !$ , !1" , !1% , !1& , !1$ , 法 可 参 见 文 献 [ ’] # 下 面 仅 以 !" 为 例 进 行 多 维 多 项 式 拟 合 # 原 始 !" 随 各 子 区 域 即 分 度 点 的 变 化 曲 线 如 图 $ 所 示 # 用 ,-./-0 作 为 工 具 , 对 !" 用 最 小 二 乘 法 进 行 拟 合 , 取 拟 合 的 次 数 为 ) ! " &, ) $ " &, ) & " &, ) ’ " &#
[ [ ’] , 或 是 简 化 的 线 性 模 型 %, , 即 近 似 认 为 在 工 况 点 附 近 水 轮 机 维 持 线 性 特 性 不 机 部 分 常 采 用 简 化 模 型 &]
变 , 但 实 际 上 水 轮 机 是 一 个 复 杂 的 时 变 的 非 线 性 系 统 , 因 而 不 能 准 确 反 应 机 组 的 实 际 情 况 , 给 计 算 带 来 较 大 误 差 ! 本 文 应 用 最 小 二 乘 法 原 理 , 根 据 由 水 轮 机 综 合 特 性 曲 线 得 到 的 数 据 进 行 拟 合 , 用 动 态 的 拟 合 多 项 式 来 较 准 确 地 描 述 水 轮 机 的 非 线 性 特 性 , 然 后 用 于 电 力 系 统 的 稳 定 分 析 计 算 ! 结 果 表 明 , 水 轮 机 的 非 线 性 对 系 统 的 稳 定 性 分 析 计 算 影 响 较 大 !
)! )$ )& )’
图 !
利 用 插 值 求 取 传 递 系 数
+"
!
,
பைடு நூலகம்
" " " " -’()*$ " ’,% (,% ),% *,%
’ ( ) *
%&
用 该 式 来 逼 近 函 数 值 ( ( 从 水 轮 机 综 合 特 性 曲 线 上 求 得 ) , 其 中 , 系 数 -’()* 为 . %%%% , … … , ! $ , " , % , & ) . %%%! , … … , 各 工 况 点 的 偏 差! 为 据 最 小 二 乘 法 原 理 , 总 可 找 到 一 组 . %%% ’ , . ’()* ; " , % , & ) # 根 0 $ , ! , +" ! / ( 偏 差! 的 平 方 和 -’()* 使
一 种 用 于 电 力 系 统 仿 真 的 水 轮 机 非 线 性 模 型
曾 玉 邓 长 虹 胡 翔 勇 林 天 宝
( 电 气 工 程 系 )
!
摘 要 通 过 拟 合 的 方 法 得 到 一 种 非 线 性 的 动 态 水 轮 机 模 型 , 仿 真 结 果 表 明 , 水 轮 机 的 非 线 性 对 电
1)
武 汉 水 利 电 力 大 学 ( 宜 昌 ) 学 报
$%%% 年 & 月
系 数 均 是 多 维 变 量 的 函 数 , 如 !" " # ( $ , , 而 插 值 法 无 论 是 " , % , & ) 拉 格 朗 日 插 值 还 是 样 条 插 值 , 进 行 线 性 插 值 都 比 较 容 易 , 但 进 行 多 维 的 高 阶 的 插 值 则 相 对 困 难 # 为 此 , 可 考 虑 对 各 分 区 内 计 算 出 的 传 递 系 数 进 行 多 维 多 项 式 拟 合 , 以 解 析 表 达 式 的 形 式 进 行 描 述 # 在 动 态 计 算 时 , 不 需 要 判 断 各 工 况 点 区 间 , 而 直 接 使 用 表 达 式 计 算 # 亦 即 , 各 传 递 系 数 随 着 系 统 状 态 的 变 化 自 动 调 整 计 算 值 , 模 拟 水 轮 机 力 矩 及 流 量 变 化 的 动 态 过 程 , 从 而 也 较 准 确 地 描 述 了 水 轮 机 的 非 线 性 , 使 力 矩 和 流 量 方 程 可 适 用 于 描 述 大 范 围 变 化 时 的 水 轮 机 特 性 # 这 既 可 节 省 工 作 量 , 亦 可 提 高 计 算 精 度 , 在 一 定 程 度 上 克 服 了 上 述 方 法 的 弊 端 # 轮 机 传 递 系 数 的 拟 合 多 项 式 描 述 原 理 !#!#$ 水 以 力 矩 对 转 速 的 传 递 系 数 !" 为 例 , 其 ’ , 多 项 式 为 ( , ) , * 次
稿 日 期 : * &% * %+ &))) ! 收
万方数据 曾 玉 , 硕 士 , 从 事 电 力 系 统 运 行 与 控 制 、 电 站 仿 真 等 研 究 ! 武 汉 水 利 电 力 大 学 ( 宜 昌 ) 电 气 工 程 系 ( ((’,,%)
&
区 已 计 算 出 的 () 进 行 线 性 插 值 获 得 此 工 况 点 的 传 递 系 数 值 !
%
这 种 方 法 存 在 以 下 问 题 : 首 先 是 要 判 断 工 况 点 的 分 区 , 需 要 计 算 的 工 作 量 比 较 大 , 其 次 由 于 各 传 递
[ 两 种 方 法 都 存 在 着 工 作 量 大 、 精 度 差 、 以 及 连 续 性 问 题 (] !
把 上 述 两 式 在 工 况 点 附 近 用 泰 勒 级 数 展 开 , 水 轮 机 特 性 可 以 用 线 性 的 力 矩 方 程 和 流 量 方 程 表 示 为 ’ " # ( ) ) * ( + + * ( ,, * ( - . # (.)) * (.++ * (.,, * (.-式 中 , 别 为 水 轮 机 力 矩 对 转 速 、 导 叶 开 度 、 轮 叶 开 度 、 水 头 的 传 递 系 数 , 别 ( (+ , (, , (- 分 ( (.+ , (., , (.- 分 ) , .) , 为 水 轮 机 流 量 对 转 速 、 导 叶 开 度 、 轮 叶 开 度 、 水 头 的 传 递 系 数 ! 具 体 表 达 式 可 参 见 文 献 [ (] ! 目 前 一 般 用 差 分 的 方 法 , 在 各 分 区 内 计 算 水 轮 机 的 各 传 递 系 数 值 ! 在 系 统 动 态 计 算 时 , 先 判 断 工 况 点 的 位 置 , 再 由 邻 近 分 区 内 已 求 取 的 传 递 系 数 用 插 值 法 求 取 此 工 况 点 的 传 递 系 数 值 , 以 此 来 描 述 水 轮 机 的 非 线 性 ! 如 图 & 采 用 线 性 插 值 法 时 , 若 已 判 断 出 工 况 点 落 在 ! 区 内 , 则 可 由 ! 区 已 计 算 出 的 () 和 /
力 系 统 的 稳 定 计 算 具 有 较 大 的 影 响 !
关 键 词 水 轮 机 ; 拟 合 ; 稳 定 分 析 分 类 号 "#$%& 随 着 电 力 系 统 中 大 型 机 组 的 广 泛 应 用 及 电 网 规 模 的 逐 渐 扩 大 , 电 力 系 统 的 安 全 稳 定 性 越 来 越 得 到 重 视 , 需 准 确 计 及 动 力 设 备 的 动 态 特 性 ! 在 常 规 的 研 究 及 稳 定 性 分 析 计 算 软 件 中 , 水 力 系 统 尤 其 是 水 轮