卫星的位置计算.
GPS卫星位置计算

GPS卫星位置计算
GPS(全球定位系统)卫星位置计算是指利用GPS系统中的卫星信号
来确定地球上其中一点的精确位置。
GPS系统是由一组运行在地球轨道上
的卫星组成,通过接收到这些卫星发出的信号,可以进行三角测量,从而
计算出接收器的准确位置。
在GPS卫星位置计算中,主要涉及的概念有卫
星轨道、卫星位置估计、测量范围等。
卫星位置估计是指通过接收到多颗卫星发出的信号,利用三角测量原
理来估计卫星的准确位置。
当接收器接收到至少4颗卫星的信号时,可以
根据卫星的位置信息以及接收信号的时间差来计算出接收器的准确位置。
其中,接收信号的时间差可以通过卫星信号中的时间戳来获得,而卫星位
置信息则是通过卫星的广播信号来传输的。
测量范围是指卫星信号的有效接收范围,理论上,在开阔的空地上,
能够接收到卫星信号的范围应该是全球范围。
然而,在一些特殊的环境中,如高楼大厦、山谷、密林等地形复杂的地方,接收器可能受到归一化干扰,导致无法正常接收到卫星信号。
为了解决这个问题,可以通过建立更多的
基站或使用增强型GPS接收器等手段来提高信号接收的可靠性和精确性。
总结起来,GPS卫星位置计算通过接收到卫星发出的信号,利用三角
测量原理来计算接收器的准确位置。
这个过程涉及到卫星轨道、卫星位置
估计、测量范围等概念,通过合理的部署卫星、精确的计算方法和有效的
信号接收手段,可以实现全球范围内的地理定位服务。
卫星定位公式
卫星定位公式
卫星定位公式是用于计算接收器所接收到的卫星信号的时间和位置的公式。
在全球定位系统(GPS)中,卫星定位公式基于以下三个主要部分:
1. 卫星发射时间
2. 卫星信号传播时间
3. 接收器时间
卫星定位公式可以表示为:
T = T0 + ΔT + ΔT'
其中:
-T 是接收器显示的时间;
-T0 是卫星发射的时间;
-ΔT 是卫星信号传播时间;
-ΔT' 是接收器时间误差。
卫星信号传播时间ΔT可以通过以下公式计算:
ΔT = sqrt((c * T0) / (4 * π* d))
其中:
- c 是光速,约为3 ×10^8 米/秒;
-T0 是卫星发射的时间;
- d 是卫星与接收器之间的距离。
接收器时间误差ΔT'主要取决于接收器的精度以及其他外部因素。
此外,为了计算接收器的位置,还需要另一个方程。
通常使用伪距测量法,伪距测量方程为:
ρ= sqrt((c * ΔT)^2 + b^2)
其中:
-ρ是伪距;
- c 是光速;
-ΔT 是卫星信号传播时间;
- b 是卫星轨道误差。
结合这两个方程,可以解出接收器的时间和位置。
实际上,GPS系统使用四个以上卫星的信号,因此可以利用多个方程来求解接收器的位置,从而提高定位精度。
这种方法称为解算四元组。
轨道卫星运动位置计算

轨道卫星运动位置计算轨道卫星的位置计算是航天领域中的重要任务之一,它对于实现通信、导航、气象监测等功能起着至关重要的作用。
本文将介绍轨道卫星运动位置计算的基本原理和方法。
一、轨道卫星的运动模型轨道卫星的运动可以用开普勒运动模型来描述。
开普勒运动模型假设行星围绕太阳运动,且太阳是一个质点,不考虑行星之间的相互作用。
同样,我们也可以假设卫星围绕地球运动,且地球是一个质点,不考虑卫星之间的相互作用。
根据开普勒第一定律,轨道卫星围绕地球运动的轨道是一个椭圆。
椭圆的两个焦点分别为地球的中心和轨道中心。
卫星在轨道上运动时,地球的位置可以通过确定轨道的半长轴、半短轴、离心率和轨道的倾角等参数来计算。
二、轨道卫星位置计算方法轨道卫星的位置计算方法主要包括传统方法和现代方法。
传统方法主要是利用开普勒的数值解来计算卫星的位置。
现代方法主要是利用数值计算方法和遥测数据来进行计算。
1.传统方法传统的轨道卫星位置计算方法主要有两种:开普勒法和摄动法。
开普勒法是根据开普勒第三定律和数值解方法来计算卫星的位置。
它首先确定半长轴、离心率和轨道的倾角等参数,然后通过数值积分的方法来模拟卫星的运动,得到卫星的位置和速度。
摄动法是在开普勒法的基础上考虑了一些外力的作用,如地球引力、月球引力和太阳引力等。
这些外力会对卫星的轨道产生一定的影响,通过考虑这些影响可以提高计算的精度。
2.现代方法现代方法主要是利用数值计算方法和遥测数据来计算轨道卫星的位置。
数值计算方法主要是利用数值积分的方法来模拟卫星的运动。
通过数值计算模型,可以根据卫星的初始位置和速度来计算卫星在未来一些时刻的位置和速度。
遥测数据是通过各种测量手段来获取的卫星的相关数据,如卫星的位置、速度和加速度等。
通过分析这些数据,可以获得卫星的运动状态,并进一步计算出卫星的位置。
在实际的轨道卫星位置计算中,通常会结合使用传统方法和现代方法,以提高计算的准确性和稳定性。
三、轨道卫星位置计算的应用轨道卫星的位置计算应用广泛,主要包括通信、导航、气象监测和科学研究等领域。
从广播星历计算卫星位置
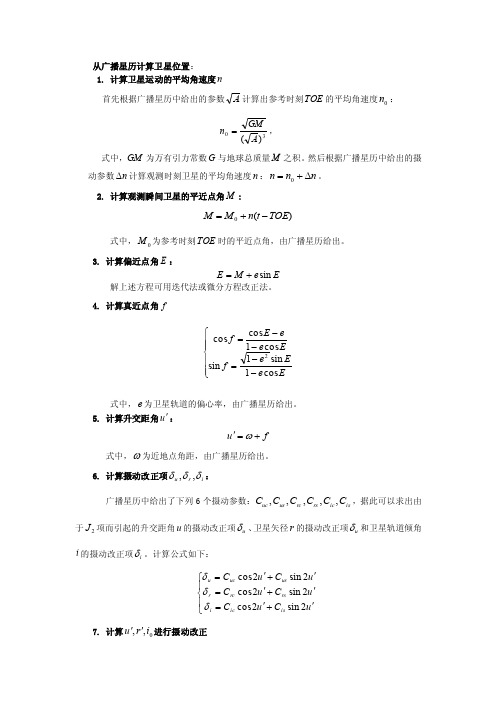
从广播星历计算卫星位置: 1. 计算卫星运动的平均角速度n首先根据广播星历中给出的参数A 计算出参考时刻TOE 的平均角速度0n :30)(A GM n =,式中,GM 为万有引力常数G 与地球总质量M 之积。
然后根据广播星历中给出的摄动参数n ∆计算观测时刻卫星的平均角速度n :n n n ∆+=0。
2. 计算观测瞬间卫星的平近点角M :)(0TOE t n M M -+=式中,0M 为参考时刻TOE 时的平近点角,由广播星历给出。
3. 计算偏近点角E :E e M E sin +=解上述方程可用迭代法或微分方程改正法。
4. 计算真近点角f⎪⎪⎩⎪⎪⎨⎧--=--=E e E e f Ee e Ef cos 1sin 1sin cos 1cos cos 2式中,e 为卫星轨道的偏心率,由广播星历给出。
5. 计算升交距角u ':f u +='ω式中,ω为近地点角距,由广播星历给出。
6. 计算摄动改正项i r u δδδ,,:广播星历中给出了下列6个摄动参数:is ic rs rc us uc C C C C C C ,,,,,,据此可以求出由于2J 项而引起的升交距角u 的摄动改正项u δ、卫星矢径r 的摄动改正项u δ和卫星轨道倾角i 的摄动改正项i δ。
计算公式如下:⎪⎩⎪⎨⎧'+'='+'='+'=u C u C u C u C u C u C is ic irs rc r us uc u 2sin 2cos 2sin 2cos 2sin 2cos δδδ 7. 计算0,,i r u ''进行摄动改正⎪⎪⎩⎪⎪⎨⎧-++=+-=+'=+'=)()cos 1(0TOE t dt di i i E a r r u u i r r u δδδδ 式中:a 为卫星轨道的长半径,2)(A a =,0i 为TOE 时刻的轨道倾角,由广播星历中的开普勒六参数给出,dtdi为i 的变化率,由广播星历中的摄动九参数给出。
卫星导航定位算法_常用参数和公式
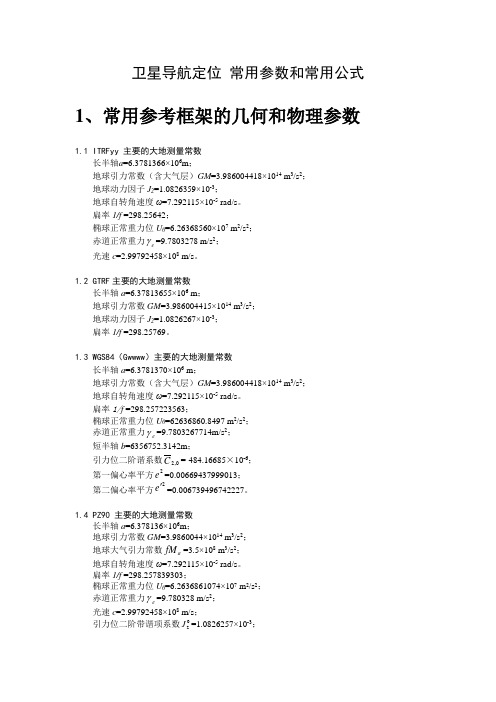
卫星导航定位常用参数和常用公式1、常用参考框架的几何和物理参数1.1 ITRFyy 主要的大地测量常数长半轴a=6.3781366×106m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球动力因子J2=1.0826359×10-3;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.25642;椭球正常重力位U0=6.26368560×107 m2/s2;γ=9.7803278 m/s2;赤道正常重力e光速c=2.99792458×108 m/s。
1.2 GTRF主要的大地测量常数长半轴a=6.37813655×106 m;地球引力常数GM=3.986004415×1014 m3/s2;地球动力因子J2=1.0826267×10-3;扁率1/f =298.25769。
1.3 WGS84(Gwwww)主要的大地测量常数长半轴a=6.3781370×106 m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.257223563;椭球正常重力位U0=62636860.8497 m2/s2;γ=9.7803267714m/s2;赤道正常重力e短半轴b=6356752.3142m;引力位二阶谐系数C=-484.16685×10-6;2,0第一偏心率平方2e=0.00669437999013;e'=0.006739496742227。
第二偏心率平方21.4 PZ90 主要的大地测量常数长半轴a=6.378136×106m;地球引力常数GM=3.9860044×1014 m3/s2;fM=3.5×108 m3/s2;地球大气引力常数a地球自转角速度ω=7.292115×10-5 rad/s。
卫星定位公式
卫星定位公式【原创版】目录1.卫星定位的基本原理2.卫星定位公式的构成3.卫星定位公式的应用4.卫星定位技术的发展正文1.卫星定位的基本原理卫星定位系统是一种利用卫星发射的信号来确定地球表面某一点的精确位置的技术。
其基本原理可以概括为:测量卫星发射的信号从卫星到达地面某一点的时间,根据光速和时间的关系,计算出该点与卫星之间的距离。
同时,通过至少三个卫星的定位,可以确定该点的三维坐标。
2.卫星定位公式的构成卫星定位公式主要包括以下三个部分:(1) 计算卫星与地面点之间的距离公式:d = c * t,其中 d 为距离,c 为光速(约为 3 * 10^8 米/秒),t 为信号传输时间。
(2) 计算卫星的轨道参数公式:T = 2 * π * sqrt(a^3 / μ),其中 T 为卫星的周期,a 为卫星的半长轴,μ为地球的标准引力参数。
(3) 计算地面点的三维坐标公式:x = (t1 * cos(E1) - t2 * cos(E2)) * cos(A) + (t1 * sin(E1) - t2 * sin(E2)) * sin(A),y = (t1 * cos(E1) - t2 * cos(E2)) * sin(A) - (t1 * sin(E1) - t2 * sin(E2)) * cos(A),z = (t1 * cos(E1) + t2 * cos(E2)) * cos(I) + (t1 * sin(E1) + t2 * sin(E2)) * sin(I),其中 x、y、z 为地面点的三维坐标,t1、t2 为卫星 1、卫星 2 的信号传输时间,E1、E2、I 分别为卫星 1、卫星 2 的倾角和地球的倾角。
3.卫星定位公式的应用卫星定位公式广泛应用于各种定位导航系统,如我国的北斗卫星导航系统、美国的 GPS 系统等。
这些系统通过卫星发射的信号,实时计算接收器与卫星之间的距离,从而实现对地球表面的精确定位。
GNSS-第3讲 卫星运动基础与位置计算
§3.1 卫星无摄运动
开普勒第一定律(轨道定律): 卫星沿一个椭圆轨道环绕地 球运行,而地球处于椭圆的 一个焦点上
b a
m
r f
M
近地点
r a (1 e2 ) 1 e cos f
§3.1 卫星无摄运动
1、卫星运动轨道参数
m
a
b M
f
近地点
z
ω
升交点
a :椭圆长半轴 b :椭圆短半轴,也可以用偏心率e表示
n
(
i0 ik
x xk
xi xi
)
yk
拉格朗日多项式内插
内插精度
➢ 采用17阶多项式,精度可优于5mm
注意事项
➢ 要对某一时段的轨道内插,精密轨道数据应该完全 覆盖该时段,最好前后有9个历元的延伸
➢ 下载数据时,需要观测当天及前后各一天的数据
2、根据精密星历计算卫星位置
任意时刻 t 卫星位置的计算
➢ 原理:插值法 ➢ 方法:拉格朗日插值法、且贝雪夫插值法等
拉格朗日插值法:
已知函数y f (x)的n个结点x0 , x1,...,xn及其对应的 函数值y0 , y1,...,yn对于插值区间内的任一点x,其函数 值为
f
(x)
n k 0
X轴旋转i角、绕Z轴旋转 M
y
角,求出卫星在天球坐
i
标系下的坐标。
x 春分点
升交点
3)将天球坐标转换到地球 坐标。
起始子 午面 Z
春分点 x
z
Y
f Mω
Ω0
升交点
X
近地点 y
计算过程
1) 计算卫星运行的平均角速度(引力常数和长半轴)
n0
GM a3
3 GPS卫星位置的计算

作业
平近点角(地球旋转)
偏近点角(轨道偏心率)
真近点角fs
4 卫星位置计算(II)
4 卫星位置计算(III)
4 卫星位置计算(IV)
4 卫星位置计算(V)
广播星历n文件
作业
下载2012年1月18日广播星历文件,并编程计算 PRN06、PRN13、PRN21 在历元2012-01-18 14:29:36(GPST/hh:mm:ss) 的卫星位置。 ftp:///gps/data/daily/2012/018/12n brdc0180.12n
卫星定位技术与应用
GPS卫星位置计算
授课教师:刘志强 单 位:河海大学
主要内容
(一)卫星轨道在GPS定位中的意义 (二)卫星的无摄与受摄运动
(三)卫星运动的开普勒定律
(四) GPS卫星位置计算
1 卫星轨道在GPS定位中的意义
卫星在空间运行的轨迹称为轨道;描述卫星 轨道位置和状态的参数称为轨道参数。
卫星在上述地球引力场中的无摄运动,也称为开普勒运动,其规律可以 通过开普勒定律来描述。
3 卫星运动的开普勒定律(I)
开普勒第一运动定律:卫星运行的轨道是一个椭圆, 而椭圆的一个焦点与地球的质心相重合。
远地点
近地点
卫星绕地球运行的轨道面,是一个通过地球质心的静止平面。 轨道椭圆一般称开普勒椭圆,其形状和大小不变。 在开普勒椭圆轨道上,卫星离地心最近的点称为近地点,而 离地心最远的点称为远地点;它们在惯性空间中的位置是固定不 变的。
3 开普勒轨道参数(I)
真近点角 fs
近地点 赤道平面 卫星轨道
升交点赤经 Ω 近地点角距 ω
春分点
升交点
轨道倾角 i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 计算思路
– 以地心为原点,建立轨道直角坐标系; – 计算卫星在轨道直角坐标系下的坐标; – 然后将轨道直角坐标系作一系列旋转,求出卫星在天球坐标 系下的坐标; – 将天球坐标系转换至地球坐标系。
无摄运动下卫星位置的计算
轨道直角坐标系
x0 r cos s f s y0 r sin s f s
u s f s
x0 r cos u y r sin u 0 z0 0
z0 0
轨道坐标系转换为天球坐标系
• 第一步:绕X’轴顺转角度i,以使Z’轴和Z轴重合 • 第二步:绕Z轴顺转角度Ω ,以使X’轴和X轴重合
x x0 y R R i y 1 0 3 z z0 cos sin 0 R3 sin cos 0 0 1 0 0 0 1 R1 i 0 cos i sin i 0 sin i cos i
天球坐标系转换至地球坐标系
• 起始子午面与过春分点的子午面的夹角实质为春分点的格 林尼治恒星时GAST。将瞬时天球坐标系绕Z轴逆转角度 GAST,即与瞬时地球坐标系重合。
X x Y R GAST y 3 Z z
cos GAST sin GAST 0 R3 GAST ቤተ መጻሕፍቲ ባይዱ sin GAST cos GAST 0 0 0 1