直流电机伺服系统实验报告
实验三直流伺服电动机实验doc

三直流伺服电动机实验一、实验目的1、通过实验测出直流伺服电动机的参数r a、K e、K T。
2、掌握直流伺服电动机的机械特性和调节特性的测量方法。
二、预习要点1、分析掌握直流伺服电动机的运行原理。
2、如何测量直流伺服电动机的机电时间常数,并求传递函数。
三、实验项目1、测直流伺服电动机的电枢电阻。
2、测直流伺服电动机的机械特性T=f(n)。
3、测直流伺服电动机的调节特性n=f(U a)。
4、测定空载始动电压和检查空载转速的不稳定性。
5、测量直流伺服电动机的机电时间常数。
四、实验方法2、用伏安法测直流伺服电动机电枢的直流电阻图3-1测电枢绕组直流电阻接线图(1) 按图3-1接线,电阻R用屏上900Ω和900Ω串联共3600Ω阻值。
(2) 经检查无误后接通可调直流电源,并调至220V,合上开关S,调节R使电枢电流达到0.2A,迅速测取电机电枢两端电压U和电流I,再将电机轴分别旋转三分之一周和三分之二周。
同样测取U、I,记录于表3-1中,取三次的平均值作为实际冷态电阻。
(3) 计算基准工作温度时的电枢电阻由实验直接测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温,按下式换算到基准工作温度时的电枢绕组电阻值。
式中: R aref ——换算到基准工作温度时电枢绕组电阻,(Ω) R a ——电枢绕组的实际冷态电阻,(Ω) θref ——基准工作温度,对于E 级绝缘为75℃ θa ——实际冷态时电枢绕组温度,(℃) 4、测取直流伺服电动机的机械特性图3-2 直流伺服电动机接线图(1) 按图3-2接线,图中R f2选用屏上1800Ω阻值,开关S 选用D51, A1、A2选用毫安表、安培表。
(2)把R f2调至最小,开关S 1打开,先接通励磁电源,再接通可调直流电源并调至220V 。
(3) 合上开关S ,调节涡流测功机给电机加载。
调节R f1阻值,使n=n N =1600r/min ,I a =I N =0.8A ,U=U N =220V ,此时电机励磁电流为额定励磁电流。
直流伺服电机实验报告材料

实验六 直流伺服电机实验一、实验设备及仪器 被测电机铭牌参数:P N =185W ,U N =220V ,I N =1.1A , 使用设备规格(编号):1.MEL 系列电机系统教学实验台主控制屏(MEL-I 、MEL-IIA 、B ); 2.电机导轨及测功机、转速转矩测量(MEL-13); 3.直流并励电动机M03(作直流伺服电机);4.220V 直流可调稳压电源(位于实验台主控制屏的下部); 5.三相可调电阻900Ω(MEL-03); 6.三相可调电阻90Ω(MEL-04);7.直流电压、毫安、安培表(MEL-06);二、实验目的1.通过实验测出直流伺服电动机的参数r a 、e κ、T κ。
2.掌握直流伺服电动机的机械特性和调节特性的测量方法。
三、实验项目1.用伏安法测出直流伺服电动机的电枢绕组电阻r a 。
2.保持U f=U fN=220V,分别测取U a =220V及U a=110V的机械特性n=f(T)。
3.保持U f=U fN=220V,分别测取T2=0.8N.m及T2=0的调节特性n=f(Ua)。
4.测直流伺服电动机的机电时间常数。
四、实验说明及操作步骤1.用伏安法测电枢的直流电阻Ra取三次测量的平均值作为实际冷态电阻值Ra=3132a a a R R R ++。
表中Ra=(R a1+R a2+R a3)/3; R aref =Ra*a ref θ++235235(3)计算基准工作温度时的电枢电阻由实验测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温。
按下式换算到基准工作温度时的电枢绕组电阻值:R aref =Raaref θθ++235235式中R aref ——换算到基准工作温度时电枢绕组电阻。
(Ω) R a ——电枢绕组的实际冷态电阻。
(Ω)θref ——基准工作温度,对于E 级绝缘为75℃。
θa ——实际冷态时电枢绕组的温度。
(℃)2.测直流伺服电动机的机械特性I S:电流源,位于MEL-13,由“转矩设定”电位器进行调节。
直流伺服电机实验报告_3

直流电机的特性测试一、实验要求在实验台上测试直流电机机械特性、工作特性、调速特性(空载)和动态特性, 其中测试机械特性时分别测试电压、电流、转速和扭矩四个参数, 根据测试结果拟合转速—转矩特性(机械特性), 并以X轴为电流, 拟合电流—电压特性、电流—转速特性、电流—转矩特性, 绘制电机输入功率、输出功率和效率曲线, 即绘制电机综合特性曲线。
然后在空载情况下测试电机的调速特性, 即最低稳定转速和额定电压下的最高转速, 即调速特性;最后测试不同负载和不同转速阶跃下电机的动态特性。
二、实验原理图三、实验操作步骤1.测量直流电机的机械特性和动态特性①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压和电枢电流信号引出, 分别接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定每个通道的测量范围。
②系统上电。
③用计算机给定电机的电枢电压信号, 逐渐增加负载(顺时针转动负载旋钮), 选择记录下此过程中的20组数据, 每组数据包括测量电枢电压、测量电枢电流、电机转速和电磁转矩值。
④计算机停止给定电机的电枢电压信号, 系统电源关闭。
2.测量直流电机的调速特性本实验要求测量的是空载下的调速特性, 测量额定电压下的最高转速和最低稳定转速。
步骤如下:①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压信号引出, 接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定通道的测量范围。
②利用式(1-7)计算电机额定电压(3V)对应的测量电压值, 为5.16V。
电机实际电压=(前面板测量电压-0.76)*2.75-0.1③系统上电。
④不断改变计算机输出的电机电压信号, 直至测量电压信号的值为5.16V。
记录下此时的转速值, 即为额定电压下的最高稳定转速。
⑤不断减小计算机输出地电机电压信号, 观察转速逐渐减小和稳定的情况, 记录下最低稳定转速值。
直流伺服电动机实验报告1
淄博职业技术学院控制电机实验报告XX学院___年级 XX班姓名________学号_________同组人__________实验日期________年_____月____日温度________ 湿度________ 实验一直流伺服电动机电枢电阻的测量一、实验目的1、通过实验测出直流伺服电动机的参数ra、Ke、KT。
2、掌握直流伺服电动机的机械特性二、实验项目1、测直流伺服电动机的电枢电阻。
三、实验方法1、实验设备:2、用伏安法测直流伺服电动机电枢的直流电阻(1)用伏安法测直流伺服电动机电枢的直流电阻按图1接线,电阻选用2.2K 100W 的变阻器。
电流表的量程选用2A ,电源选用直流电机专用电源上的电枢电源。
图.1 测电枢绕组直流电阻接线图(2) 经检查无误后接通电枢电源,并调至220V ,合上开关S ,调节R 使电枢电流达到0.2A ,迅速测取电机电枢两端电压U 和电流I ,再将电机轴分别旋转三分之一周和三分之二周。
同样测取U 、I ,记录于表1-1中,取三次的平均值作为实际冷态电阻。
(3)计算基准工作温度时的电枢电阻由实验直接测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温,按下式换算到基准工作温度时的电枢绕组电阻值。
aref aaref R R θθ++=235235式中: Raref ——换算到基准工作温度时电枢绕组电阻,(Ω)Ra ——电枢绕组的实际冷态电阻,(Ω) θref——基准工作温度,对于E 级绝缘为75℃ θa——实际冷态时电枢绕组温度,(℃) 四、实验报告1、由实验数据求得电机参数:R aref 、K e 、K TR aref ——直流伺服电动机的电枢电阻 ——电势常数——转矩常数五、实验心得通过本次试验加深了对直流伺服电动机的理解, 六、思考题1、若直流伺服电动机正(反)转速有差别,试分析其原因?(1)“零飘”,零点不是绝对零点,要调节零飘点,接近于0位置,正反转就基本一致了 (2)因为可控硅制造工艺和参数问题,实际上反转跟正传的电流环并不一致eT aNe K K n U K π300==。
直流电动机实验报告

直流电动机实验报告实验报告:直流电动机实验引言:直流电动机是一种将直流电能转化为机械能的装置,广泛应用于各个领域。
在本实验中,我们将通过对直流电动机的实验研究,探究其工作原理和性能特点。
一、实验目的:1. 了解直流电动机的组成结构和工作原理;2. 掌握直流电动机的启动、制动和运行过程;3. 学习使用实验仪器测量电动机的性能参数。
二、实验原理:直流电动机是由电枢和磁极组成。
当电枢通过外部直流电源供电时,在电磁场的作用下,电枢会受到电磁力的作用而产生旋转。
电动机的工作原理可以通过右手定则来解释。
在电动机的实验中,我们还需要了解几个重要的性能参数:1. 电压常数Kv:表示电动机转速和电压之间的关系;2. 转矩常数Kt:表示电动机转矩和电流之间的关系;3. 电动机的机械功率:指电动机转动时所做的功。
三、实验步骤:1. 连接电动机与电源,并确认电路连接正确;2. 使用电压表和电流表对电动机的电压和电流进行测量,并记录数据;3. 测量不同电压下电动机的转速,并记录数据;4. 根据测得的数据计算电动机的转矩常数Kt和电压常数Kv;5. 测量不同电压和负载下电动机的功率,并进行数据分析。
四、实验结果及分析:1. 测量数据的记录表格:电压(V)电流(A)转速(rpm)10 0.5 100020 1.0 200030 1.5 300040 2.0 400050 2.5 50002. 通过数据计算得到的电压常数Kv为200 rpm/V,转矩常数Kt为0.04 Nm/A;3. 在不同电压和负载下测量的功率随电压和负载增加而增加。
实验中我们观察到,当电压增加时,电动机的转速也随之增加。
这符合电压常数Kv的定义。
而转速的增加会带动机械负载的旋转,从而转矩也相应增加。
而转矩的增大会使得电流增加,因此电压和转矩之间的关系可以通过转矩常数Kt来表示。
实验结果进一步说明了直流电动机的工作原理,即通过外部直流电源提供电能,电枢在电磁场的作用下转动。
直流伺服调速系统实验报告
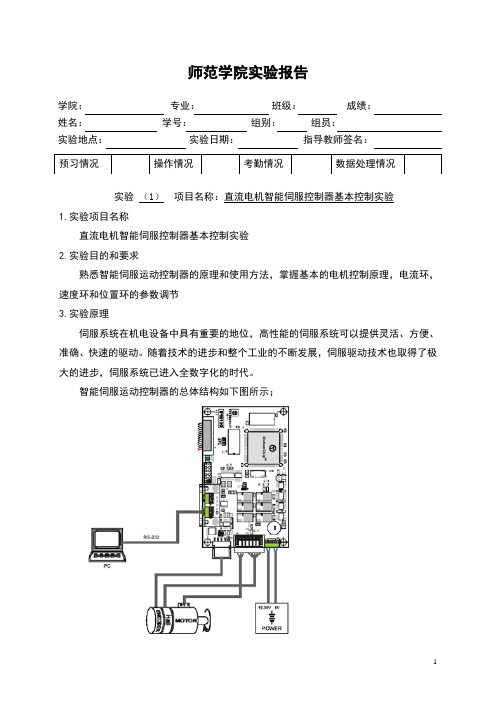
师范学院实验报告学院:专业:班级:成绩:姓名:学号:组别:组员:实验地点:实验日期:指导教师签名:实验(1)项目名称:直流电机智能伺服控制器基本控制实验1.实验项目名称直流电机智能伺服控制器基本控制实验2.实验目的和要求熟悉智能伺服运动控制器的原理和使用方法,掌握基本的电机控制原理,电流环,速度环和位置环的参数调节3.实验原理伺服系统在机电设备中具有重要的地位,高性能的伺服系统可以提供灵活、方便、准确、快速的驱动。
随着技术的进步和整个工业的不断发展,伺服驱动技术也取得了极大的进步,伺服系统已进入全数字化的时代。
智能伺服运动控制器的总体结构如下图所示;Motion Studio是智能伺服控制器的开发环境,是一款基于Windows环境的高性能可视化软件,用于开发包含有Technosoft智能伺服驱动的运动解决方案,它容许您配置一个运动系统,包括运动系统元素定义和控制器参数测定,利用高级集成工具设计运动程序,它可以自动生成TML代码,深层代码开发工具容许进一步的编辑和直接编译、连接、产生执行代码并送到IPM驱动器,最后,先进的图形显示工具:如数据记录、控制按钮和TML变量观测可用于系统的运动。
其界面如下图所示:根据电机参数,在下图所示的界面中设置参数:设置电流环,速度环和位置环各参数:在设置速度环和位置环参数后,对系统进行“Tune&Test”实验,改变参数,直到可以达到满意的控制效果。
4.主要仪器设备直流伺服系统控制平台、控制计算机5.实验内容及步骤(1)参照智能伺服控制器用户手册,熟悉其结构和原理(2)掌握智能伺服控制器和计算机通讯的原理和方法,掌握编码器信号采集,电位器信号采集和电机控制的基本方法。
(3)熟悉Motion Studio的使用。
6.实验数据记录和处理(1)测试出的电机电压值是多少?(2)测试出电机和负载总的转动惯量是多少?7. 问题与讨论(1)电机的转动方向是通过测试什么信号得到的?(2)测试电机的速度环时显示的波形是什么曲线?请简单画出波形图。
直流电机伺服系统实验报告
直流电机伺服系统实验报告目录直流电机伺服系统实验报告 (1)实验一、MATLAB仿真实验 (2)1.直流电机的阶跃响应 (2)2.直流电机的速度闭环控制 (2)3.直流电机的位置闭环控制 (7)实验二、直流电机调速系统 (11)1.反馈增益调节 (12)2.抗扰动能力对比 (12)3.比例调节下的特性测试与控制参数优化 (13)4.比例积分调节下的特性测试与控制参数优化 (15)5.测试速度环的速度误差系数(选做) (18)6.思考题 (19)实验三、直流电机位置伺服系统 (20)1.测试位置环的速度误差系数 (20)2.位置环采用比例控制器时的特性 (20)3.位置环采用PI 控制器时的动态特性 (23)4.测试工作台位移与输入电压的静特性 (24)5.思考题 (24)实验总结 (27)实验一、 MATLAB 仿真实验1.直流电机的阶跃响应如下图,对直流电机输入一个阶跃信号,画出阶跃响应曲线,指出主导极点。
利用Simulink 仿真搭建模型:实验结果 阶跃响应曲线两个极点是1210,10000s s =-=-,其中主导极点是110s =-。
2. 直流电机的速度闭环控制如下图,用测速发电机检测直流电机转速,用控制器Gc(s)控制加到电机电枢上的电压。
(1)假设()100c G s =,用Matlab 画出控制系统开环Bode 图,计算增益剪切频率、相位裕量、相位剪切频率、增益裕量:当()100c G s =时,改为单位负反馈,开环传递函数:100()(0.11)(0.0011)(0.00011)G s s s s =+++绘制系统开环Bode 图:利用margin 函数,得到:增益剪切频率784.3434/c rad s ω=,相位裕量48.1370γ=,相位剪切频率3179.7/rad s πω-=,增益裕量11.1214g K =。
(2)通过分析Bode 图,选择合适的常数P K 作为()c G s ,使闭环阶跃响应的最大超调量在0~5%之间:超调量(%)100(1sin )5p M γ≈--,降低最大超调量需要适当提高相位裕量γ,反解得到γ的取值为:64.2°<γ<71.8°这就需要减小p K (但是快速性将降低,稳态误差将增大)。
直流电机伺服系统实验指导及实验报告

- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直流电机伺服系统实验报告目录直流电机伺服系统实验报告 (1)实验一、MATLAB仿真实验 (2)1.直流电机的阶跃响应 (2)2.直流电机的速度闭环控制 (2)3.直流电机的位置闭环控制 (7)实验二、直流电机调速系统 (11)1.反馈增益调节 (12)2.抗扰动能力对比 (12)3.比例调节下的特性测试与控制参数优化 (13)4.比例积分调节下的特性测试与控制参数优化 (15)5.测试速度环的速度误差系数(选做) (18)6.思考题 (19)实验三、直流电机位置伺服系统 (20)1.测试位置环的速度误差系数 (20)2.位置环采用比例控制器时的特性 (20)3.位置环采用PI 控制器时的动态特性 (23)4.测试工作台位移与输入电压的静特性 (24)5.思考题 (24)实验总结 (27)实验一、 MATLAB 仿真实验1.直流电机的阶跃响应如下图,对直流电机输入一个阶跃信号,画出阶跃响应曲线,指出主导极点。
利用Simulink 仿真搭建模型:实验结果 阶跃响应曲线两个极点是1210,10000s s =-=-,其中主导极点是110s =-。
2. 直流电机的速度闭环控制如下图,用测速发电机检测直流电机转速,用控制器Gc(s)控制加到电机电枢上的电压。
(1)假设()100c G s =,用Matlab 画出控制系统开环Bode 图,计算增益剪切频率、相位裕量、相位剪切频率、增益裕量:当()100c G s =时,改为单位负反馈,开环传递函数:100()(0.11)(0.0011)(0.00011)G s s s s =+++绘制系统开环Bode 图:利用margin 函数,得到:增益剪切频率784.3434/c rad s ω=,相位裕量48.1370γ=,相位剪切频率3179.7/rad s πω-=,增益裕量11.1214g K =。
(2)通过分析Bode 图,选择合适的常数P K 作为()c G s ,使闭环阶跃响应的最大超调量在0~5%之间:超调量(%)100(1sin )5p M γ≈--,降低最大超调量需要适当提高相位裕量γ,反解得到γ的取值为:64.2°<γ<71.8°这就需要减小p K (但是快速性将降低,稳态误差将增大)。
结合下图阶跃响应曲线,最终决定取42P K =。
此时最大超调量为4.80%,相位裕量为 65.9825γ=,剪切频率423.1329/c rad s ω=,满足要求。
如图:(3)计算此时的稳态位置误差系数,画出闭环系统阶跃响应曲线,稳态值是否与理论一致?关于稳态位置误差系数,理论值:04110.001111lim ()lim 500.02()1()()0.02142(0.11)(101)0.0011ss i s s s e sX s sH s G s H s ss s s →→-+==+++++ 111.20.02142==+,而实验得到的稳态误差为5048.8 1.2-=,与理论相一致。
(4)令()Ic P K G s K s=+,通过分析(2)的Bode 图,判断如何取合适的P K 和I K 的值,使得闭环系统既具有高的剪切频率和合适的相位裕量,又具有尽可能高的稳态速度误差系数。
画出阶跃响应曲线;开环传递函数:()1()()()()(0.11)(0.0011)(0.00011)(0.11)(0.0011)(0.00011)I P I c P K K s K G s G s H s K s s s s s s s s +=+=++++++ 消除了阶跃响应的误差 静态速度误差系数:保持42P K =不变,420I K =令传递函数极点与零点重合,使得剪切频率较高和相位lim ()()lim(0.11)(0.0011)(0.00011)p Iv Is s K s K K sG s H s K s s s →→+===+++裕量合适。
此时最大超调量为4.70%,相位裕量为 66.4120γ=,剪切频率390.8797/c rad s ω= (4)考虑实际环节的饱和特性对响应曲线的影响:在(4)的基础上,在控制器的输出端加饱和环节,饱和值为±5,输入单位阶跃信号,看各点波形,阶跃响应曲线与(4)有何区别?Simulink 模型如下仿真结果如下所示:红线为加了限幅器的曲线,可见限幅器使得响应时间变长,原先的响应时间在0.003秒左右,限幅后,响应时间在0.02秒以上,同时超调量增加约5%最终稳态值不变3.直流电机的位置闭环控制T为直流电机位置闭环控制系统如下图,其中做了电流控制环。
T为电磁力矩,d作用在电机轴上的阻力矩。
(1)先调好速度环:仅对上图中的速度环分析和仿真,速度控制器()c G s ω取为PK 形式,确定其参数。
取105P K =。
此时最大超调量为4.70%,相位裕量为 65.9825γ=,剪切频率423.1329/c rad s ω=,满足要求。
如图:(2)设1()d T t =,仿真速度环在单位阶跃输入下的输出ω,分析稳态误差。
稳态误差包括两部分:输入引起的误差和干扰引起的误差。
对于输入引起的误差,开环传递函数为I 型系统,单位阶跃输入的稳态误差为0。
对于干扰引起的误差:偏差2000.022000.0210.00110.0011()()2000.022000.02110.000110.00110.000110.0011d P P s s s s s T s K K ss s s s s s ε++==++++++干扰引起的稳态偏差01lim()lim ()ss t s Pt s s K εεε→∞→===干扰引起的稳态误差2110.47619(0)0.021050.02ssss P e H K ε====⨯⨯则总误差120.47619ss ss ss e e e =+= (3)调试位置环:令d T =,分析速度环的闭环传递函数,设计、调试PK 形式的()c G s θ,使位置环具有尽可能快的响应速度并且无超调。
d T =时,速度环的闭环传递函数:1200()200()(0.0011)0.00011()12000.02(0.0011)(0.00011)4()1()0.000110.0011c c c c G s G s s s s G s s s s G s G s s s s ωωωω++==++++++调节PK 形式的()c G s θ。
当P K 增大时,超调量逐渐增大,调整时间先减少再增大。
在没有超调量的情况下取调整时间最短的PK ,最后得到4P K =.2。
此时,单位阶跃响应曲线如下:(4)令1()d T t =,仿真位置环在单位阶跃输入下的输出θ。
分析稳态误差。
仿真曲线如上图所示。
同样,稳态误差包括两部分:输入引起的误差和干扰引起的误差。
对于输入引起的误差,开环传递函数为I 型系统,单位阶跃输入的稳态误差为零。
对于干扰引起的误差: 偏差:22222000.0212000.021(1)(1)10.0011 4.20.0011 4.2()()4.21052000.021 4.21052000.0211(1)1(1)0.000110.0011 4.20.000110.0011 4.2d s s s s s T s s s s s s s s ε⨯+⨯+++==⨯⨯+⨯++⨯+++++ 干扰引起的稳态偏差011lim ()lim () 4.2105441ss t s t s s εεε→∞→====⨯干扰引起的稳态误差2110.02(0)80.3880(1)4.2ss ss e H ε===⨯+ 则总误差1211080.3880.38ss ss ss e e e =+=+=(5)如何调整()c G s ω和()c G s θ的形式可以使dT 为常数时θ的稳态误差为0?确定控制器的参数。
设()I c P K G s K s ω=+,()I c P K G s K s θ''=+,()d T c t =。
同样,稳态误差包括两部分:输入引起的误差和干扰引起的误差。
对于输入引起的误差,开环传递函数为:212000.02()()()()(1)0.00011(0.0011)()I I P P I PK K G s H s K K K s s s s s K s ''=++++++2200()()0.02(0.0011)()(0.00011)(0.0011)()P I P I P I P I K s K K s K s K s K s s s K s K ''+++++=+++为II 型系统,输入的稳态误差为零。
对于干扰引起的误差: 偏差:22222000.021(1)0.0011()()()()2000.0211(1)0.000110.00112000.021(1)0.00111()()2000.0211(1)0.000110.0011I P d II P P I P I P I I P P I P s s K K ss T s K K K K s s s s s K K s s s K K s sK K K K s s s s s K K s ε⨯++''+=''+++⨯+++''+⨯++''+=''+++⨯+++''+干扰引起的稳态偏差:2022000.021(1)0.00111lim ()lim ()lim 0()()2000.0211(1)0.000110.0011I P ss t s s I I P P I P s s K K st s s ssK K K K s s s s s K K sεεε→∞→→⨯++''+====''+++⨯+++''+干扰引起的稳态误差200(0)1ssss e H ε===则总误差12000ss ss ss e e e =+=+=所以,要使系统稳态误差为0,则IK 或I K '不为0,即()c G s ω或()c G s θ包含积分环节。
实验二、 直流电机调速系统速度环电路如下图所示:1. 反馈增益调节设置系统稳态增益,根据负反馈系统的公式:1=1A A AF F−−−−→+很大时输出输入(A 是前向放大倍数)。
一般的实用负反馈的前向放大电路都用PI 控制器, A 很大,此时只需调整反馈系数F 即可设置稳态时的输入/输出,本实验要求调整到3并保持不变。
系统暂时按 PI 调节接好,C4用 0.1 μF。
当输入电压为 6V 时,调节测速反馈电位计的位置(β值),使得测速机电压为 18V 。