矩阵压缩1
【高考领航】高考数学总复习 第1节 线性变换与二阶矩阵课件 苏教选修42
0或 1
M=10
0伸压变换矩阵. k
当 M=k0
0时确定的变换将平面图形作沿 1
x
轴方向伸长或压
缩,当 k>1 时伸长,当 0<k<1 时压缩.变换 TM 确定的变换不是简单
地把平面上的点(向量)沿 x 轴方向“向下压”或“向外伸”,它是 x
轴方向伸长或压缩,对于 x 轴下方的点向上压缩,对于 x 轴上的点
•5、诚实比一切智谋更好,而且它是智谋的基本条件。
•6、做老师的只要有一次向学生撒谎撒漏了底,就可能使他的全部教育成果从此为之失败。2022年1月2022/1/152022/1/152022/1/151/15/2022
•7、凡为教者必期于达到不须教。对人以诚信,人不欺我;对事以诚信,事无不成。2022/1/152022/1/15January 15, 2022
旋转中心为原点且逆时针旋转角α时,旋转变换的变换矩阵为
cos α sin α
c-ossinαα.旋转变换只会改变几何图形的位置,不会改变几
何图形的形状和大小,旋转中心在旋转过程中保持不变,图形的旋
转由旋转中心和旋转角所确定.绕定点旋转 180°的变换相当于关于
定点作中心反射变换.
(5)将一个平面图投影到某条直线(或某个点)的变换称为投影变 换,变换对应的矩阵称为投影变换矩阵,本节中主要研究的是由矩
表示.
(2)二阶矩阵00
0称为零矩阵,简记为 0
0,矩阵01
0称为二阶 1
单位矩阵,记作 E2.
2.矩阵的乘法
(1)
行
矩
阵
a11a12
与
列
矩
阵
b11 b21
的
乘
矩阵分析 第一章
矩阵的代数性质1.矩阵是线性映射的表示:线性映射的相加表示为矩阵的相加线性映射的复合表示为矩阵的相乘2.矩阵是一种语言,它是表示复杂系统的有力工具。
学习矩阵理论的重要用途之一就是学会用矩阵表示复杂系统的关系,培养根据矩阵推演公式的能力是学习矩阵论的目的之一。
定义一个矩阵有几种方式:可以通过定义矩阵的每一个元素来定义一个矩阵,也可以通过矩阵具有的性质来定义一个矩阵。
如:对称矩阵可以定义为:a ij =a ji也可以定义为: (x, Ay)=(Ax,y),还可以定义为: Ax=∇f(x), 其中f(x)=x T Ax/2,即它对向量x 的作用相当于函数f(x)在x 处的梯度。
3. 矩阵可以表示为图像矩阵的大小可以表示为图像。
反之,一幅灰度图像本身就是矩阵。
图像压缩就是矩阵的表示问题.这时矩阵相邻元素间有局部连续性,既相邻的元素的值大都差别不大。
4. 矩阵是二维的(几何性质)矩阵能够在二维的纸张和屏幕等平面媒体上表示,使得用矩阵表示的问题显得简单清楚,直观,易于理解和交流。
很多二元关系很直观的就表示为矩阵,如关系数据库中的属性和属性值,随机马尔科夫链的状态转移概率矩阵,图论中的有向图或无向图的矩阵表示等。
第一章:线性空间和线性变换1. 线性空间集合与映射集合是现代数学最重要的概念,但没有严格的定义。
集合与其说是一个数学概念,还不如说是一种思维方式,即用集合(整体)的观点思考问题。
整个数学发展的历史就是从特殊到一般,从个体到整体的发展历程。
集合的运算及规则,两个集合的并、交运算以及一个集合的补;集合中元素没有重合,子集,元素设S ,S'为集合映射:为一个规则σ:S → S', 使得S 中元素a 和S'中元素对应,记为 a'=σ(a),或σ:a →a'. 映射最本质的特征在于对于S 中的任意一个元素在S'中仅有唯一的一个元素和它对应。
映射的原象,象;映射的复合。
光场∣ψ1(5)》q中广义电场的高次和压缩效应

光场∣ψ1(5)》q中广义电场的高
次和压缩效应
光场(Light Field)是一种基于频率和时间的电场,它可以描述物体或者系统中的光信号。
它可以看作是一个多维的矩阵,其中每个元素表示特定的频率和时间对应的电场强度值。
在“ψ1(5)q”中,广义电场指的是一种由频率和时间表示的电场,它表示的是一种更加细致的光学特性。
在“ψ1(5)q”中,光场的高次效应指的是当光束被不同的物理系统扰动时,会出现高次谐波,例如五次谐波、七次谐波等。
当光束经过一定的物体时,可能会出现多重反射或者衍射,从而使得光场产生更加复杂的高次谐波。
这种高次谐波的特性可以帮助我们更好地了解光的特性,从而实现更好的光学设计。
此外,“ψ1(5)q”中的光场压缩效应指的是当光场经过一定的物体时,光场的空间分布会有所改变,从而导致光场的压缩。
这种压缩效应可以用来实现光学成像系统和光学测量系统中的图像和信号的精确定位,这些定位可以被用来增强光学设计中的性能,从而达到更好的光学效能。
总之,“ψ1(5)q”中的光场包括高次和压缩效应,这两种光场效应都为光学设计提供了重要的指导,从而可以实现更好的光学性能。
数据结构-第5章--数组练习题

数据结构-第5章--数组练习题第5章数组一、选择题3.设有数组A[i,j],数组的每个元素长度为3字节,i的值为1到8,j的值为1到10,数组从内存首地址BA开始顺序存放,当用以列为主存放时,元素A[5,8]的存储首地址为(A)。
A.BA+141B.BA+180C.BA+222D.BA+2254.假设以行序为主序存储二维数组A=array[1..100,1..100],设每个数据元素占2个存储单元,基地址为10,则LOC[5,5]=(A)。
A.808B.818C.1010D.10205.数组A[0..5,0..6]的每个元素占五个字节,将其按列优先次序存储在起始地址为1000的内存单元中,则元素A[5,5]的地址是()。
1195A.1175B.1180C.1205D.12107.将一个A[1..100,1..100]的三对角矩阵,按行优先存入一维数组B[1‥298]中,A中元素A6665(即该元素下标i=66,j=65),在B数组中的位置K为()。
供选择的答案:A.198B.195C.1972+64某3=19410.若对n阶对称矩阵A以行序为主序方式将其下三角形的元素(包括主对角线上所有元素)依次存放于一维数组B[1..(n(n+1))/2]中,则在B中确定aij(iA.i某(i-1)/2+jB.j某(j-1)/2+iC.i某(i+1)/2+jD.j某(j+1)/2+i11.设A是n某n的对称矩阵,将A的对角线及对角线上方的元素以列为主的次序存放在一维数组B[1..n(n+1)/2]中,对上述任一元素aij(1≤i,j≤n,且i≤j)在B中的位置为(C)。
A.i(i-l)/2+jB.j(j-l)/2+iC.j(j-l)/2+i-1D.i(i-l)/2+j-112.A[N,N]是对称矩阵,将下面三角(包括对角线)以行序存储到一维数组T[N(N+1)/2]中,则对任一上三角元素a[i][j]对应T[k]的下标k是(AB)。
原创--秩为1的矩阵相关性质
即AT A的属于特征值0的所有特征向量为 k2 ξ2 + · · · + kn ξn , 其中ki 不全为0,且ki ∈ R, 2 ≤ i ≤ n. AT A的属于特征值c的所有特征向量为k1 AT , k1 ∈ R, k1 ̸= 0. 例 2.11 设α, β 是n维非零列向量,A = αβ T ,则 (1)0是A的一个特征值; (2)A可对角化的充要条件为β T α ̸= 0. 证明:(1)(法1)由前面A的特征多项式为λn−1 (λ − tr(A))可得. (法2)易知|A| = 0,从而结论成立. (2)必要性.若A可对角化且β T α = 0,则A的特征值全为0,从而A = 0.矛盾. 充分性.若β T α ̸= 0,则 Aα = αβ T α = (β T α)α,
例 2.2 设n阶矩阵A是秩为1的半正定矩阵.证明:必存在n为非零列向量α使,故存在可逆矩阵P 使得 ( ) 1 T A=P P, 0n−1 则α = P e1 即为所求. 例 2.3 设α, β 是n维非零列向量,A = αβ T ,则A2 = tr(A)A,从而Ak = tr(A)k−1 A,其 中k 为正整数. 证明:设 a1 b1 a1 b2 · · · a2 b1 a2 b2 · · · A = αβ T = . . . . . . . . . an b1 an b2 · · · 则 A2 = αβ T αβ T = (β T α)αβ T = tr(A)A. ◇※☆■◇◇※☆■◇ 2 高等代数资源网 a1 bn a2 bn . . . . an bn
专题:秩1矩阵的性质及其应用
高等代数资源网 May 23, 2012
1 声明
您现在看到的这份文件来自.本站原创的内容,采用创作共用组 织(Creative Commons)的“公共领域”(Public Domain)许可。即放弃一切权利,全 归公共领域。但涉及到其他版权人的摘录、转载、投稿、翻译等类内容不在此列。 本文的内容仅供学习参考之用,作者不对内容的正确性作任何承诺,作者不对因使用本 文而造成的一切后果承担任何责任. 关于如何使用本文的建议:首先保证自己认真做了一遍题目,否则请不要查看本文.记 住: 别人做是别人的,自己做才是自己的 . 作者水平有限,错误不可避免,欢迎您来信指出:www52gdorg@. 休息一下,欣赏美图,马上开始。
第4章 矩阵分解-1
3 1 2
H2H1A
0
1
1
R
0
0
0
矩阵分析简明教程
Q
H
H 1
21
1 3
1
2 2
2 1 2
2
2 1
所求的QR分解为
A QR
8
0 1 1
矩阵分析简明教程
1 5
x1 2x2 x3 5x2 3x3
0 1
12 5
x3
4 5
(
5 12
)
3 5
x1
2x2 x2
1 3 0
x3
1 3
(2)
x1 x2
1 3 0
x3 1 3
(II )
矩阵分析简明教程
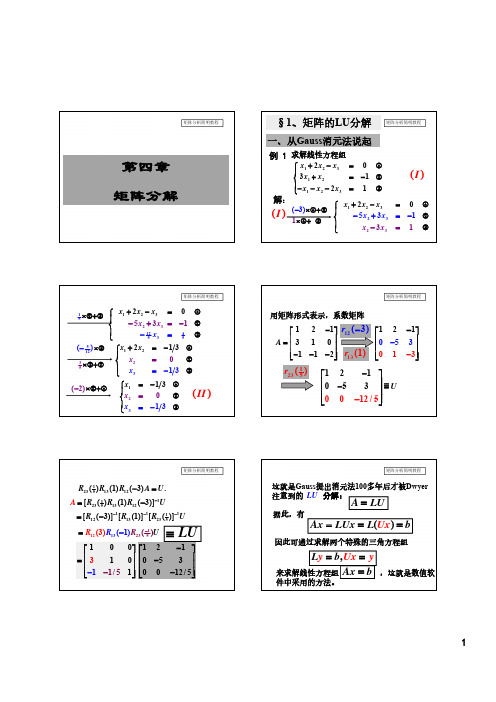
用矩阵形式表示,系数矩阵
1 2 1 r12 (3) 1 2 1
角方阵 R ,使得
A QR
当 m = n 时 ,Q 就 是 酉 矩 阵 或 正 交 矩 阵 。
矩阵分析简明教程
例 1 将下列矩阵进行QR分解:
1 2 2
A
1 0
0 1
2 1
4
矩阵分析简明教程
解: 1 (1,1,0, )T, 1 1 (1,1,0)T
1
||
1 1
||
1 (1,1, 0)T 2
定理4.2.3 设 e1 1, 0,, 0T C n ,
x1 , x2 ,, xn T C n , 0
令
x1
x1 ,
,
x1
0 ,u
e1
x1 0
e1
H E 2uuH是n 阶Householder矩阵,且
H -e1
矩阵分析简明教程
定理4.2.4(QR分解)设 A为 任 一 n 阶 矩 阵 则必存在 n 阶酉矩阵 Q 和 n 阶上三角方
n阶矩阵可逆的充分必要条件(一)

n阶矩阵可逆的充分必要条件(一)n阶矩阵可逆的充分必要条件引言在线性代数领域中,矩阵的可逆性是一个非常重要的概念。
在这篇文章中,我们将探讨n阶矩阵可逆的充分必要条件。
I. 什么是矩阵的可逆性?矩阵的可逆性,也称为矩阵的可逆、非奇异性,指的是一个矩阵是否存在逆矩阵。
如果一个矩阵存在逆矩阵,则称之为可逆矩阵;反之,如果一个矩阵不存在逆矩阵,则称之为不可逆矩阵。
II. n阶矩阵可逆的充分必要条件若矩阵A是一个n阶方阵,则以下条件是矩阵可逆的充分必要条件:1.行列式非零:矩阵A的行列式det(A)不等于零。
2.满秩:矩阵A的秩r等于n。
其中,秩r定义为线性无关的行(或列)的最大数目。
3.存在逆矩阵:矩阵A存在一个n阶逆矩阵A−1,满足AA−1=A−1A=I。
其中,I为n阶单位阵。
III. 可逆矩阵的性质可逆矩阵具有以下性质:1.唯一性:如果一个矩阵是可逆的,那么它的逆矩阵是唯一的。
2.乘积的可逆性:如果矩阵A和矩阵B都是可逆的,那么它们的乘积AB也是可逆的,并且(AB)−1=B−1A−1。
3.转置的可逆性:如果矩阵A是可逆的,那么其转置矩阵A T也是可逆的,并且(A T)−1=(A−1)T。
IV. 可逆矩阵的应用可逆矩阵在实际应用中有广泛的用途,例如:1.线性方程组的求解:通过求解矩阵方程AX=B,可以使用可逆矩阵将其转化为X=A−1B,从而求解未知向量X。
2.矩阵变换的逆运算:通过可逆矩阵的逆矩阵,可以实现对矩阵的逆变换,如旋转、缩放和平移等操作。
3.数据压缩与恢复:可逆矩阵可以用于数据压缩算法,如主成分分析(PCA)和奇异值分解(SVD),用于降低数据维度并实现数据的恢复。
结论在本文中,我们讨论了n阶矩阵可逆的充分必要条件,即行列式非零、满秩和存在逆矩阵。
我们还介绍了可逆矩阵的性质和应用。
理解矩阵可逆性的概念对于我们在线性代数和应用数学中的学习和实践都具有重要意义。
希望通过本文的介绍,读者能够对n阶矩阵的可逆性有更深入的理解,并将这一概念应用于实际问题中。
数据结构习题(题型版)

三、填空题1.数据的物理结构包括数据元素的表示和数据元素间关系的表示。
2. 对于给定的n 个元素,可以构造出的逻辑结构有线性结构、树形结构、图形结构、集合四种。
3.数据的逻辑结构是指数据的组织形式,即数据元素之间逻辑关系的总体。
而逻辑关系是指数据元素之间的关联方式或称“邻接关系”。
4.一个数据结构在计算机中表示(又称映像)称为存储结构。
5.抽象数据类型的定义仅取决于它的一组逻辑特性,而与在计算机内部如何表示和实现无关,即不论其内部结构如何变化,只要它的数学特性不变,都不影响其外部使用。
6.数据结构中评价算法的两个重要指标是时间复杂度和空间复杂度。
7. 数据结构是研讨数据的逻辑结构和物理结构,以及它们之间的相互关系,并对与这种结构定义相应的操作,设计出相应的算法。
8.一个算法具有5个特性: 有穷性、确定性、可行性,有零个或多个输入、有一个或多个输出。
11.下面程序段中带下划线的语句的执行次数的数量级是(log2n)i=1;WHILE i<n DO i=i*2;12. 下面程序段中带下划线的语句的执行次数的数量级是(nlog2n )。
i=1;while (i<n)for(i=1;i<=n;i++)x=x+1;i=i*2;15. 下面程序段的时间复杂度为O(n) 。
(n>1)su m=1;for (i=0;sum<n;i++) sum+=1;8.对于一个数据结构,一般包括哪三个方面的讨论?逻辑结构、存储结构、操作(运算)4.在一个长度为n 的顺序表中第i个元素(1<=i<=n)之前插入一个元素时,需向后移动n-i+1 个元素。
5.在单链表中设置头结点的作用是主要是使插入和删除等操作统一,在第一个元素之前插入元素和删除第一个结点不必另作判断。
另外,不论链表是否为空,链表指针不变。
10.链接存储的特点是利用指针来表示数据元素之间的逻辑关系。
11.顺序存储结构是通过物理上相邻表示元素之间的关系的;链式存储结构是通过指针表示元素之间的关系的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了节省存储空间并且加快处理速度,需要对这类矩阵进行压缩存储,压缩存储的原则是:不重复存储相同元素;不存储零值元素。
一、相关概念
㈠特殊矩阵:矩阵中存在大多数值相同的元,或非0元,且在矩阵中的分布有一定规律。
⒈对称矩阵:矩阵中的元素满足
a ij=a ji 1≤i,j≤n
⒉三角矩阵:上(下)三角矩阵指矩阵的下(上)三角(不包括对角线)中的元素均为常数c或0的n阶矩阵。
⒊对角矩阵(带状矩阵):矩阵中所有非0元素集中在主对角线为中心的区域中。
㈡稀疏矩阵:非0元素很少(≤ 5%)且分布无规律。
二、存储结构及算法思想
1、对称矩阵
存储分配策略:每一对对称元只分配一个存储单元,即只存储下三角(包括对角线)的元, 所需空间数为: n(n+1)/2。
存储分配方法:用一维数组sa[n(n+1)/2]作为存储结构。
sa[k]与a ij之间的对应关系为:
2、三角矩阵
也是一个n阶方阵,有上三角和下三角矩阵。
下(上)三角矩阵是主对角线以上(下)元素均为零的n阶矩阵。
设以一维数组sb[0..n(n+1)/2]作为n阶三角矩阵B的存储结构,仍采用按行存储方案,则B中任一元素b i,j和sb[k]之间仍然有如上的对应关系,只是还需要再加一个存储常数c的存储空间即可。
如在下三角矩阵中,用n(n+1)/2的位置来存储常数。
对特殊矩阵的压缩存储实质上就是将二维矩阵中的部分元素按照某种方案排列到一维数组中,不同的排列方案也就对应不同的存储方案
2、稀疏矩阵
常见的有三元组表示法、带辅助行向量的二元组表示法(也即行逻辑链表的顺序表),十字链表表示法等。
1)、三元组表示法
三元组表示法就是在存储非零元的同时,存储该元素所对应的行下标和列下标。
稀疏矩阵中的每一个非零元素由一个三元组(i,j,a ij)唯一确定。
矩阵中所有非零元素存放在由三元组组成的数组中。
在此,data 域中表示非零元的三元组是以行序为主序顺序排列的。
以下看如何利用三元组表示法来实现矩阵的转置。
(1)按照b.data中三元组的次序依次在a.data中找出相应的三元组进行转置。
换句话说,按照矩阵M的列序进行转置。
为了找到M的每一列中所有的非零元素,需要对其三元组表a.data从第一行起整个扫描一遍。
由于a.data是以M
的行序为存放每个非零元的,由此得到的恰好是b.data应有的顺序。
2)、带辅助行向量的二元组表示法及十字链表表示法在下一节中学习介绍。
三、存储结构及C语言描述
1、三元组表示法
(1)按照b矩阵中的行次序依次在a.data中找到相应的三元组进行转置。
(2)快速转置:按照a.data中三元组的次序进行转置,并将转置后的三元组放到b.data中的恰当位置。
恰当位置的确定:首先计算M矩阵的每一列(即T的每一行)中非0元的个数,然后求得M矩阵每一列第一个非0元在b.data中的位置。
算法基本思想:
设置两个向量:
num[col]:第col列的非零元素个数。
cpot[col]:第col列第一个非零元在b.data中的恰当位置。
在转置过程中,指示该列下一个非零元在b.data中的位置。
1、num[col]的计算:
顺序扫描a.data三元组,累计各列非0元个数。
2、cpot[col]计算:
2)、带辅助行向量的二元组表示法及十字链表表示法在下一节中学习介绍。
四、算法的C 语言实现
#include "stdio.h"
#include "stdlib.h"
#define MAXSIZE 12500
#define OK 1
typedef int ElemType;
typedef struct
{
int i,j;
ElemType e;
}Triple;
typedef struct
{
Triple data[MAXSIZE+1];
int mu,nu,tu; //矩阵行数,列数和非0元个数
}TSMatrix;
int cpot[MAXSIZE+1],num[MAXSIZE+1];
int TransposeSMatrix(TSMatrix M,TSMatrix &T) {
T.mu=M.nu;
T.nu=M.mu;
T.tu=M.tu;
if(T.tu)
{
int q=1;
for(int col=1;col<=M.nu;++col)
for(int p=1;p<=M.tu;++p)
if(M.data[p].j==col)
{
T.data[q].i=M.data[p].j;
T.data[q].j=M.data[p].i;
T.data[q].e=M.data[p].e;
++q;
}//if
}//if
return OK;
}//TransposeSMatrix
int InPutM(TSMatrix &M)
{
printf("input nu mu tu(With a space interval)of a Matrix:\n"); scanf("%d %d %d",&M.nu,&M.mu,&M.tu); //row,colume,and tu printf("Please input the data of Matrix:\n");
for(int c=1;c<=M.tu;c++)
{
scanf("%d",&M.data[c].i);
scanf("%d",&M.data[c].j);
scanf("%d",&M.data[c].e);
}//for
return 1;
}//InPut
int PrintM(TSMatrix T)
{
printf("Matrix after transpose is:\n");
for(int c=1;c<=T.tu;c++)
{
printf("%d %d %d\n",T.data[c].i,T.data[c].j,T.data[c].e);
}//for
return 1;
}//InPut
int FastTransposeSMatrix(TSMatrix M,TSMatrix &T)
{
T.mu=M.nu;
T.nu=M.mu;
T.tu=M.tu;
if(T.tu)
{
for(int col=1;col<=M.mu;++col) num[col]=0;
for(int t=1;t<=M.tu;++t) ++num[M.data[t].j]; //记述M.data[t].j列 //非0元的个数
cpot[1]=1;
//求第col列中第一个非零元在b.data(T)中的序号
for(int col=2;col<=M.mu;++col)
cpot[col]=cpot[col-1]+num[col-1];
for(int p=1;p<=M.tu;++p)
{
int col=M.data[p].j;
int q=cpot[col];
T.data[q].i=M.data[p].j;
T.data[q].j=M.data[p].i; T.data[q].e=M.data[p].e; ++cpot[col];
}//for
}//if
return OK;
}//FastTransposeSMatrix
int main()
{
TSMatrix M,T;
InPutM(M);
//TransposeSMatrix(M,T); FastTransposeSMatrix(M,T); PrintM(T);
return OK;
}。