三角矩阵在压缩存储下的转置矩阵源代码
数据结构实验五矩阵的压缩存储与运算学习资料
数据结构实验五矩阵的压缩存储与运算第五章矩阵的压缩存储与运算【实验目的】1. 熟练掌握稀疏矩阵的两种存储结构(三元组表和十字链表)的实现;2. 掌握稀疏矩阵的加法、转置、乘法等基本运算;3. 加深对线性表的顺序存储和链式结构的理解。
第一节知识准备矩阵是由两个关系(行关系和列关系)组成的二维数组,因此对每一个关系上都可以用线性表进行处理;考虑到两个关系的先后,在存储上就有按行优先和按列优先两种存储方式,所谓按行优先,是指将矩阵的每一行看成一个元素进行存储;所谓按列优先,是指将矩阵的每一列看成一个元素进行存储;这是矩阵在计算机中用一个连续存储区域存放的一般情形,对特殊矩阵还有特殊的存储方式。
一、特殊矩阵的压缩存储1. 对称矩阵和上、下三角阵若n阶矩阵A中的元素满足= (0≤i,j≤n-1 )则称为n阶对称矩阵。
对n阶对称矩阵,我们只需要存储下三角元素就可以了。
事实上对上三角矩阵(下三角部分为零)和下三角矩阵(上三角部分为零),都可以用一维数组ma[0.. ]来存储A的下三角元素(对上三角矩阵做转置存储),称ma为矩阵A的压缩存储结构,现在我们来分析以下,A和ma之间的元素对应放置关系。
问题已经转化为:已知二维矩阵A[i,j],如图5-1,我们将A用一个一维数组ma[k]来存储,它们之间存在着如图5-2所示的一一对应关系。
任意一组下标(i,j)都可在ma中的位置k中找到元素m[k]= ;这里:k=i(i+1)/2+j (i≥j)图5-1 下三角矩阵a00 a10 a11 a20 … an-1,0 … an-1,n-1k= 0 1 2 3 …n(n-1)/2 …n(n+1)/2-1图5-2下三角矩阵的压缩存储反之,对所有的k=0,1,2,…,n(n+1)/2-1,都能确定ma[k]中的元素在矩阵A中的位置(i,j)。
这里,i=d-1,(d是使sum= > k的最小整数),j= 。
2. 三对角矩阵在三对角矩阵中,所有的非零元素集中在以主对角线为中心的带内状区域中,除了主对角线上和直接在对角线上、下方对角线上的元素之外,所有其它的元素皆为零,见图5-3。
矩阵快速转置算法详解
矩阵快速转置算法详解好啦,今天我们来聊聊矩阵快速转置算法,这可是个让人觉得又爱又恨的话题。
矩阵嘛,想必大家都不陌生,毕竟它就像我们生活中的一张大表格,记录着各种数据。
可这转置,听起来就像是魔法一样,把行变成列,列又变回行,这其中可有不少讲究。
想象一下,一个矩阵就像是你的冰箱,里面装着各种各样的食材。
平常你打开冰箱,看到一层层整齐的食物,心里就觉得舒服。
不过,有时候你也想换个角度,看看这些食材在不同位置的组合。
这个时候,转置就登场啦!转置后的矩阵,就像是你重新整理过的冰箱,虽然东西没变,但看上去就是更有条理,更让人一目了然。
转置到底是怎么个操作呢?其实就是把矩阵里的元素交换位置。
比如,原本在第一行第二列的元素,现在要跑到第二行第一列。
听起来简单对吧?但当你的矩阵大得像个足球场,里面的元素多得跟星星一样,那可就得小心翼翼,别让它们跑丢了。
这里就需要一个“快速”的方法,避免慢吞吞的操作,简直就是搬家时的“火速搬迁”,让你几乎感觉不到麻烦。
说到快速转置算法,最经典的就是“分块转置”。
这就像你在打扫房间的时候,通常不会一次性把所有东西都搬出去,而是先把几个小块整理好。
这个算法也是如此,把大矩阵分成小块,分别转置,然后再合并。
这种方法就像是在料理过程中,把大菜分成几道小菜,最后汇聚成一桌美食,既高效又省力。
分块的方法还有个好处,就是它能更好地利用缓存,提高处理速度,简直是个聪明的“小调皮”。
转置过程中,你可能会碰到一些小坑,比如说对称矩阵。
它们就像是一对双胞胎,无论怎么交换,最后看上去都是一样的。
对此,快速转置算法能巧妙地利用这一点,不用额外的空间,就能轻松搞定,简直让人拍手叫好。
就像生活中遇到的那些小聪明,总是能在关键时刻帮你一把,真是妙不可言。
转置算法的实现可不仅仅是写代码那么简单。
想象一下,代码里的每一行都像是一位舞者,它们需要配合默契,才能让整个矩阵的转置变得流畅自如。
这时候,算法的优化就显得尤为重要。
LAPACK函数介绍不完全版

为方便线性代数运算,现将LAPACK中的函数介绍如下:1.函数的命名规则:LAPACK里的每个函数名已经说明了该函数的使用规则。
所有函数都是以XYYZZZ的形式命名,对于某些函数,没有第六个字符,只是XYYZZ的形式。
第一个字母X代表以下的数据类型:S REAL,单精度实数D DOUBLE PRECISION,双精度实数C COMPLEX,单精度复数Z COMPLEX*16 或DOUBLE COMPLEX注:在新版LAPACK中含有使用重复迭代法的函数DSGESV和ZCDESV。
头2个字母表示使用的精度:DS 输入数据是double双精度,算法使用单精度ZC 输入数据是complex*16,算法使用complex单精度复数接下面两个字母YY代表数组的类型。
BD bidiagonal,双对角矩阵DI diagonal,对角矩阵GB general band,一般带状矩阵GE general (i.e., unsymmetric, in some cases rectangular),一般情形(即非对称,在有些情形下为矩形)GG general matrices, generalized problem (i.e., a pair of general matrices),一般矩阵,广义问题(即一对一般矩阵)GT general tridiagonal,一般三对角矩阵HB (complex) Hermitian band,(复数)厄尔米特带状阵HE (complex) Hermitian,(复数)厄尔米特矩阵HG upper Hessenberg matrix, generalized problem (i.e a Hessenberg and a triangular matrix),上海森伯格矩阵,广义问题(即一个海森伯格矩阵和一个三角矩阵)HP (complex) Hermitian, packed storage,(复数)压缩储存的厄尔米特矩阵HS upper Hessenberg,上海森博格矩阵OP (real) orthogonal, packed storage,(实数)压缩储存的正交阵OR (real) orthogonal,(实数)正交阵PB symmetric or Hermitian positive definite band,对称或厄尔米特正定带状矩阵PO symmetric or Hermitian positive definite,对称或厄尔米特正定矩阵PP symmetric or Hermitian positive definite, packed storage,压缩储存的对称或厄尔米特正定矩阵PT symmetric or Hermitian positive definite tridiagonal,对称或厄尔米特正定三对角阵SB (real) symmetric band,(实数)对称带状阵SP symmetric, packed storage,压缩储存的对称阵ST (real) symmetric tridiagonal,(实数)对称三对角阵SY symmetric,对称阵TB triangular band,三角形带状矩阵TG triangular matrices, generalized problem (i.e., a pair of triangular matrices),三角形矩阵,广义问题(即一对三角形阵)TP triangular, packed storage,压缩储存的三角形阵TR triangular (or in some cases quasi-triangular),三角形阵(在某些情形下为类三角形阵)TZ trapezoidal,梯形阵UN (complex) unitary,(复数)酉矩阵UP (complex) unitary, packed storage,(复数)压缩储存的酉矩阵最后三个字母ZZZ代表计算方法。
mathnet 旋转矩阵
mathnet 旋转矩阵MathNet库提供了一种简单的方式来处理旋转矩阵。
我们可以使用MathNet库中的Matrix3D类,该类由三个Vector3D实例表示,每个Vector3D实例表示旋转矩阵中的一行。
要创建一个旋转矩阵,我们可以使用Matrix3D构造函数,该函数接受三个Vector3D实例作为参数。
如果我们想要绕X轴旋转90度:```csharpvar xRotation = Matrix3D.Identity;xRotation.M11 = 1;xRotation.M22 = Math.Cos(Math.PI / 2);xRotation.M32 = Math.Sin(Math.PI / 2);xRotation.M23 = -Math.Sin(Math.PI / 2);xRotation.M33 = Math.Cos(Math.PI / 2);```类似地,如果我们想要绕Y轴旋转90度:```csharpvar yRotation = Matrix3D.Identity;yRotation.M11 = Math.Cos(Math.PI / 2);yRotation.M31 = -Math.Sin(Math.PI / 2);yRotation.M13 = Math.Sin(Math.PI / 2);yRotation.M33 = Math.Cos(Math.PI / 2);```要旋转一个向量,我们可以使用旋转矩阵乘以向量的方式:```csharpvar vector = new Vector3D(1, 0, 0); // X轴var rotatedVector = xRotation * vector;```MathNet库也提供了几个有用的功能,例如矩阵相乘,逆矩阵等。
如果我们想要绕任意轴旋转,我们可以使用旋转矩阵的通用形式:```csharpvar axisOfRotation = new Vector3D(1, 1, 0); axisOfRotation.Normalize();var angleOfRotation = Math.PI / 2;var cosAngle = Math.Cos(angleOfRotation);var sinAngle = Math.Sin(angleOfRotation);var rotationMatrix = Matrix3D.Identity;rotationMatrix.M11 = cosAngle + axisOfRotation.X * axisOfRotation.X * (1 - cosAngle);rotationMatrix.M12 = axisOfRotation.X * axisOfRotation.Y * (1 - cosAngle) - axisOfRotation.Z * sinAngle;rotationMatrix.M13 = axisOfRotation.X * axisOfRotation.Z * (1 - cosAngle) + axisOfRotation.Y * sinAngle;rotationMatrix.M21 = axisOfRotation.Y * axisOfRotation.X * (1 - cosAngle) + axisOfRotation.Z * sinAngle;rotationMatrix.M22 = cosAngle + axisOfRotation.Y * axisOfRotation.Y * (1 - cosAngle);rotationMatrix.M23 = axisOfRotation.Y * axisOfRotation.Z * (1 - cosAngle) - axisOfRotation.X * sinAngle;rotationMatrix.M31 = axisOfRotation.Z * axisOfRotation.X * (1 - cosAngle) - axisOfRotation.Y * sinAngle;rotationMatrix.M32 = axisOfRotation.Z * axisOfRotation.Y * (1 - cosAngle) + axisOfRotation.X * sinAngle;rotationMatrix.M33 = cosAngle + axisOfRotation.Z * axisOfRotation.Z * (1 - cosAngle);通过使用MathNet库中的Matrix3D类,我们可以轻松地创建旋转矩阵,旋转向量,并执行其他与矩阵相关的操作。
r语言 矩阵的数据格式变换 -回复
r语言矩阵的数据格式变换-回复R语言是数据分析和统计建模中常用的编程语言,它具有丰富的函数库和灵活的数据结构,用于处理各种数据类型。
矩阵是R语言中常见的数据结构之一,用于存储具有相同数据类型的元素的二维数组。
在实际应用中,我们经常会遇到需要对矩阵的数据格式进行变换的情况,本文将介绍如何使用R语言进行矩阵的数据格式变换。
1. 行列矩阵转置首先,我们来介绍如何对矩阵进行行列转置。
行列转置是指将矩阵的行变为列,列变为行。
在R语言中,可以使用`t()`函数来实现行列转置。
下面是一个简单的例子:R# 创建一个3行2列的矩阵mat <- matrix(1:6, nrow = 3)# 执行行列转置transposed_mat <- t(mat)# 输出转置后的矩阵transposed_mat上述代码首先使用`matrix()`函数创建了一个3行2列的矩阵,然后使用`t()`函数对矩阵执行了行列转置,最后输出了转置后的矩阵。
你可以运行上述代码,并观察输出结果,以更好地理解行列转置的概念和操作。
2. 矩阵的数据重塑在实际的数据分析中,我们有时候需要对矩阵的数据格式进行重塑。
例如,我们可能要将一个长格式的矩阵转换成宽格式,或者将一个宽格式的矩阵转换成长格式。
R语言中提供了一些函数来实现数据的重塑,其中最常用的是`reshape()`函数。
下面是一个使用`reshape()`函数进行数据重塑的例子:R# 创建一个4行3列的矩阵mat <- matrix(1:12, nrow = 4)# 执行数据重塑,将矩阵转换成长格式reshaped_mat <- reshape(mat, direction = "long", varying =list(1:3))# 输出重塑后的矩阵reshaped_mat上述代码首先使用`matrix()`函数创建了一个4行3列的矩阵,然后使用`reshape()`函数将矩阵转换成了长格式,最后输出了重塑后的矩阵。
中南大学数据结构与算法第5章数组和广义表课后作业答案
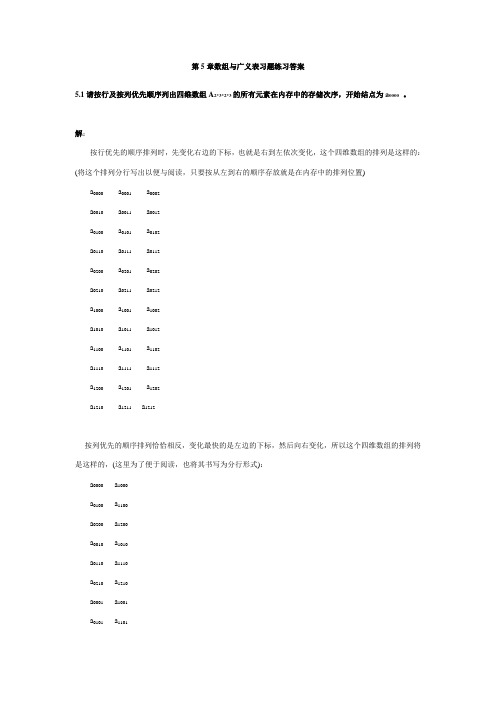
第5章数组与广义表习题练习答案5.1请按行及按列优先顺序列出四维数组A2*3*2*3的所有元素在内存中的存储次序,开始结点为a0000。
解:按行优先的顺序排列时,先变化右边的下标,也就是右到左依次变化,这个四维数组的排列是这样的:(将这个排列分行写出以便与阅读,只要按从左到右的顺序存放就是在内存中的排列位置) a0000a0001a0002a0010a0011a0012a0100a0101a0102a0110a0111a0112a0200a0201a0202a0210a0211a0212a1000a1001a1002a1010a1011a1012a1100a1101a1102a1110a1111a1112a1200a1201a1202a1210a1211a1212按列优先的顺序排列恰恰相反,变化最快的是左边的下标,然后向右变化,所以这个四维数组的排列将是这样的,(这里为了便于阅读,也将其书写为分行形式):a0000a1000a0100a1100a0200a1200a0010a1010a0110a1110a0210a1210a0001a1001a0101a1101a0201a1201a0011a1011a0111a1111a0211a1211a0002a1002a0102a1102a0202a1202a0012a1012a0112a1112a0212a02125.2 给出C语言的三维数组地址计算公式。
解:因为C语言的数组下标下界是0,所以Loc(A mnp)=Loc(A000)+((i*n*p)+k)*d其中Amnp表示三维数组。
Loc(A000)表示数组起始位置。
i、j、k表示当前元素的下标,d表示每个元素所占单元数。
5.3设有三对角矩阵A n*n,将其三条对角线上的元素逐行地存储到向量B[0...3n-3]中,使得B[k]=a ij,求:(1)用i , j 表示k的下标变换公式。
(2)用k 表示i,j 的下标变换公式。
矩阵的压缩存储
矩阵的压缩存储前⾔ ⼀⼊编程深似海,从此砖头是爱⼈,⽇⽇搬,夜夜搬,搬到天荒地⽼,精尽⼈亡,直教⼈失去了⾃我,忘记了时间,忽然之间发现九⽉份快没了,赶紧写篇博客打个卡,证明⼀下我还活着。
数组与矩阵 数组是由⼀组相同类型的数据元素构成的有限序列,访问数据元素的⽅式是使⽤元素各⾃的序号进⾏访问,也就是下标。
数组它本⾝是线性表的推⼴,⼀维数组就是⼀个向量形式的线性表,⼆维数组就是由⼀维数组组成的线性表。
在许多科学计算和⼯程应⽤中,经常要⽤到矩阵的概念,我们⽤的最多的其实就是Mysql的表,表数据都是⾏列存储,这就是矩阵。
由于矩阵具有元素数⽬固定以及元素按下标关系有序排列等特点,所以在使⽤⾼级语⾔编程时,⼀般都是⽤⼆维数组来存储矩阵。
数组的顺序存储为什么是顺序存储? 我想问这个问题就太低级了。
因为它是数组,数据的存储⽅式分为顺序存储和链式存储两种,数组⼀旦被定义,他的维数和维界就已固定,除结构的初始化和销毁外,数组只会有存取元素和修改元素的操作,不存在插⼊和删除操作,所以数组适合⽤顺序存储。
数组存放在内存中的映射关系 数组可以是多维的,但是内存空间却是⼀维的,所以我们就要把多维数组通过⼀定的映射顺序把它变成⼀维的,然后存储到内存空间之中。
在⼤多数⾼级编程语⾔中,多维数组在内存中通常有两种不同的顺序存储⽅式,按⾏优先顺序存储和按列优先顺序存储。
举个例⼦,以下3⾏4列的⼀个⼆维数组矩阵:a1,a2,a3,a4b1,b2,b3,b4c1,c2,c3,c4 按⾏优先顺序存储: 按列优先顺序存储:地址计算 地址计算的意思就是给定数组下标,求在⼀维内存空间的地址,从⽽取出数据。
我们先来看⼀维数组的地址计算 ⼀维数组内的元素只有⼀个下标,存储⽅法和普通的线性表⼀样。
如⼀维数组 A = [a1,a2,a3,......ai,.........,an],每个元素占⽤size个存储单元(就是内存⼤⼩),那么元素ai的存储地址为 A[0]的位置 + (i-1)*size再来看⼆维数组的地址计算 以⼆维数组Amn为例,⾸元素为A[0][0],数组中任意元素A[i][j]的地址为:A[0][0]的位置 + (n * (i-1) + (j-1))* size;⽐如:⼀个5⾏4列的⼆维数组A,按⾏存储,其中每个元素占2个存储单元,⾸元素地址是1000,求第3⾏第2列的元素在内存中的地址。
矩阵压缩实验报告
一、实验目的1. 了解矩阵压缩存储的基本原理和方法。
2. 掌握稀疏矩阵的压缩存储方法,包括三元组顺序表存储和压缩存储下三角矩阵。
3. 熟悉矩阵压缩存储在数据结构中的应用,提高数据存储效率。
4. 通过实验验证矩阵压缩存储方法的有效性和优越性。
二、实验原理矩阵压缩存储是一种针对稀疏矩阵的存储方法,通过压缩存储非零元素,减少存储空间,提高数据存储效率。
稀疏矩阵是指矩阵中大部分元素为0的矩阵,其特点是存储空间利用率低,计算效率低。
矩阵压缩存储主要有以下几种方法:1. 三元组顺序表存储:将稀疏矩阵中的非零元素及其对应的行、列索引存储在一个三元组中,形成顺序表。
2. 压缩存储下三角矩阵:对于下三角矩阵,只存储主对角线以下的非零元素及其对应的行、列索引。
3. 压缩存储上三角矩阵:对于上三角矩阵,只存储主对角线以上的非零元素及其对应的行、列索引。
三、实验内容1. 实现稀疏矩阵的三元组顺序表存储。
2. 实现压缩存储下三角矩阵和上三角矩阵。
3. 实现矩阵转置算法,包括压缩存储下三角矩阵的转置和压缩存储上三角矩阵的转置。
4. 比较不同存储方法的存储空间和计算效率。
四、实验步骤1. 创建一个稀疏矩阵,随机生成非零元素及其对应的行、列索引。
2. 实现稀疏矩阵的三元组顺序表存储,将非零元素及其对应的行、列索引存储在一个顺序表中。
3. 实现压缩存储下三角矩阵,只存储主对角线以下的非零元素及其对应的行、列索引。
4. 实现压缩存储上三角矩阵,只存储主对角线以上的非零元素及其对应的行、列索引。
5. 实现矩阵转置算法,包括压缩存储下三角矩阵的转置和压缩存储上三角矩阵的转置。
6. 比较不同存储方法的存储空间和计算效率。
五、实验结果与分析1. 三元组顺序表存储存储空间:n(非零元素个数) 3计算效率:O(n)2. 压缩存储下三角矩阵存储空间:n(非零元素个数) 3计算效率:O(n)3. 压缩存储上三角矩阵存储空间:n(非零元素个数) 3计算效率:O(n)4. 矩阵转置算法计算效率:O(n)通过实验结果可以看出,压缩存储下三角矩阵和上三角矩阵的存储空间和计算效率与三元组顺序表存储相当,且对于稀疏矩阵,压缩存储方法可以显著减少存储空间,提高数据存储效率。
矩阵压缩算法
矩阵压缩算法矩阵压缩算法是计算机科学和数学领域中的一项重要技术。
该算法的目的是将矩阵中的数据压缩成更小的形式,并且在对数据进行操作时仍然能够准确地还原原数据。
在大多数情况下,矩阵压缩算法非常适合在计算机科学领域使用,尤其是在处理大型数据集时。
该算法在各种数据处理任务中都非常有用,例如将图像、视频、音频和其他形式的数据压缩成更小的形式。
矩阵压缩算法的基本原理是利用矩阵的稀疏性质来压缩数据。
但是,矩阵的稀疏性是相对的,某些矩阵可能不太稀疏,而某些矩阵可能非常稀疏。
因此,不同的矩阵可能需要不同的压缩算法。
常用的矩阵压缩算法包括以下几种:1.对称压缩算法对称压缩算法(Symmetric Compressions)是一种利用矩阵的对称性质来压缩数据的算法。
对称矩阵是它本身的转置,因此可以将其上三角和下三角存储在一起,从而可以使用对称压缩算法将其压缩。
使用对称压缩算法可以将原始矩阵的存储需求减半。
3.小波变换压缩算法小波变换压缩算法(Wavelet Compressions)是一种利用小波变换来压缩数据的算法。
小波变换是一种将信号分解成各个不同频率的基本成分的数学方法。
可以使用小波变换压缩算法将信号分为不同的频带进行处理,并将每个频带中的系数进行压缩。
4.奇异值分解压缩算法奇异值分解压缩算法(Singular Value Decomposition,SVD)是一种利用奇异值分解来压缩数据的算法。
该算法将矩阵分解为三个不同的矩阵乘积的形式,其中每个矩阵的维数都较小。
使用奇异值分解压缩算法可以将原始矩阵的存储需求降低到很小的程度,并且可以在压缩后轻松地还原数据。
总的来说,矩阵压缩算法是一项非常有用的技术,可以帮助计算机科学家在处理大型数据集时节省存储空间和计算时间。
但是,每种压缩算法都有其优点和缺点,选择哪种算法取决于数据本身的特性和所需的精度。
矩阵转置运算规则
矩阵转置运算规则矩阵转置是一种常见的线性代数运算,它可以将矩阵的行和列互换位置。
在实际应用中,矩阵转置运算常常用于求解线性方程组、计算特征值和特征向量等问题。
本文将详细介绍矩阵转置的运算规则及其应用。
一、什么是矩阵转置矩阵转置是指将矩阵的行和列互换位置,即将矩阵的第i行转置为第i列,将矩阵的第j列转置为第j行。
矩阵转置的运算可以用符号T表示,例如矩阵A的转置记作AT。
二、矩阵转置的运算规则1. 矩阵转置的运算规则一:转置矩阵的维度与原矩阵相同,即如果原矩阵A是m×n的矩阵,则转置矩阵AT是n×m的矩阵。
2. 矩阵转置的运算规则二:转置矩阵的元素满足a_ij = a_ji,即转置后的矩阵中的每个元素是原矩阵中对应元素的对调。
3. 矩阵转置的运算规则三:转置运算满足分配律,即对于任意的矩阵A和B,有(A + B)T = AT + BT,(kA)T = kAT,其中k为常数。
4. 矩阵转置的运算规则四:转置运算满足结合律,即对于任意的矩阵A,B和C,有(AB)T = BTAT。
三、矩阵转置的应用1. 线性方程组的求解:矩阵转置运算在线性方程组的求解中起到重要的作用。
通过转置运算,可以将一个线性方程组转化为矩阵形式,从而利用矩阵的性质进行求解。
2. 特征值和特征向量的计算:在线性代数中,矩阵的特征值和特征向量是矩阵的重要性质。
通过矩阵转置运算,可以方便地计算矩阵的特征值和特征向量。
3. 矩阵的正交化:在某些应用中,需要将非正交矩阵转化为正交矩阵。
通过矩阵转置运算,可以得到转置矩阵的逆矩阵,从而实现矩阵的正交化。
4. 矩阵的压缩存储:在大规模数据处理中,矩阵的转置运算可以用于实现矩阵的压缩存储。
通过转置运算,可以将原矩阵的行存储方式转化为列存储方式,从而减少存储空间的占用。
四、矩阵转置的注意事项1. 矩阵转置运算是一种线性运算,满足运算的封闭性和可逆性。
2. 矩阵转置运算不改变矩阵的行列式和秩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include<stdio.h>
#include<stdlib.h>
#define max 20
#define zero 0
typedef struct{
int i,j,v;
}node;
typedef struct{
node data[max];
int m;
}TSmatrix;
TSmatrix *Setmatrix(){ //建三对角矩阵TSmatrix *T;
T=(TSmatrix
*)malloc(sizeof(TSmatrix));
printf("请输入矩阵行数或列数:\n");
scanf("%d",&T->m);
printf("建立三对角矩阵:\n");
for(int n=0;n<3*T->m-2;n++)
scanf("%d%d%d",&T->data[n].i,&T->dat a[n].j,&T->data[n].v);
return T;
}
TSmatrix *Trabsmatrix(TSmatrix *T){ //三对角矩阵转置
int n,k,temp;
TSmatrix *F;
F=(TSmatrix
*)malloc(sizeof(TSmatrix));
F->m=T->m;
for(n=0;n<3*T->m-2;n++){ //将结点信息存入新三元组表中
temp=2*T->data[n].j+T->data[n].i; //计算待存入三元数组下标
F->data[temp].i=T->data[n].j;
F->data[temp].j=T->data[n].i;
F->data[temp].v=T->data[n].v;
}
return F;
}
void TSmatrixout(TSmatrix *T){ //三对角矩阵输出
int a,b,n;
n=0;
for(a=0;a<T->m;a++){
for(b=0;b<T->m;b++){
if(T->data[n].i==a&&T->data[n].j==b){
printf("%-5d",T->data[n].v);
n++;
}
else
printf("%-5d",zero);
}
printf("\n");
}
}
void main(){
TSmatrix *T;
T=Setmatrix();
printf("三对角矩阵:\n");
TSmatrixout(T);
T=Trabsmatrix(T);
printf("转置后三对角矩阵:\n");
TSmatrixout(T);
}
问题分析:
本程序要求实现对压缩存储下的三对角矩阵进行转置,为实现上述功能,需要解决的关键问题是三对角矩阵压缩存储及转置过程。
概要设计:
利用三元组表以行序为主序压缩存储三对角矩阵。
转置时,先利用三元数组中的行标i 和列标j计算出待放入新三元数组的下标temp。
由于转置时需要将行标和列标交换,所以temp=2*j+i。
找出待存入的下标后,将相应的信息存入下标为temp的三元数组中。
详细设计:
由于三元组表中的结点存放了元素的行标i和列标j,因此可利用行标和列标互换进行转置,但这样操作后,新三元组表中的元素则以列序为主序存放,不便矩阵遍历输出,因此在将互换行标、列标后的元素存入新三元组表时,应先计算出按行序为主序存放时所在的下标temp。
由于三对角矩阵元素存入三元数组中,所在的下标temp与其行标i和列标j有temp=2*i+j关系,所以可先求出下标temp,同时将信息存入下标为temp的数组中,所得的新三元组表即以行序为主序存放的。
调试分析及小结:
错误及分析:在开始设计转置函数时,直接利用行标和列标交换方法,因此所得的新三元组表则以列序为主序存放,输出矩阵时并未正确的转置矩阵。
初步改进:参考课本的转置思想,对三元组表进行转置时,以列序为主序进行转置,转置后所得新三元组表则是以行序为主序存放,但该算法时间复杂度为O(n×t),其中n为列数,t为非0元个数。
最终改进:由于三对角矩阵元素存入三元数组中的下标temp与该元素的行标i与列标j 有temp=2*i+j关系,因此可直接将元素信息存放下标temp的数组中,该算法时间复杂度为O(t),t为非0元个数,程序代码如下:
for(n=0;n<3*T->m-2;n++){
temp=2*T->data[n].j+T->data[n].i;
F->data[temp].i=T->data[n].j;
F->data[temp].j=T->data[n].i;
F->data[temp].v=T->data[n].v;
}。