多传感器电子秤非线性补偿电路的研究
基于BP神经网络的称重传感器静态非线性误差补偿研究

第21卷 第6期2008年6月传感技术学报CHINESE JO URNAL OF S ENSO RS AND ACTU ATORSVol.21 No.6Jun.2008S tudy on Static Nonlinear Error Compensating for Weighing Sensor Based on BP Neural NetworkYAN J ie,ZH A O Yan ,ZH A N G J un -li(X i 'a n Univ er sity of Ar chitec tur e and T echnolog y X i 'a n 710055,China)Abstract:The system measuring accur acy and quality of the mix ed concrete of concrete central m ix ing sta -tion are essential fo r adding o f intellig ent mater ial and fiber m aterial.Neural netw o rks,w ith their remark -able ability to derive meaning fro m com plicated,imprecise nonlinear input output data,can be used to ex -tract patterns and detect trends that are dynam ically continuous change.T herefore,BP Neural Netw or k is applied to map the input -output relation of the w eighting system for concrete centr al mixing station so that the inputs can be accur ately m easured.T he system m easuring accur acy and quality o f the m ix ed co ncrete ofconcr ete central m ix ing station are incr eased.Key words:concr ete central m ix ing station;high accurate w eighing ;BP neur al netw ork EEACC :1295;7230;0290B基于BP 神经网络的称重传感器静态非线性误差补偿研究严 洁,赵 研,张俊利(西安建筑科技大学,西安710055)收稿日期:2007-11-13 修改日期:2008-03-20摘 要:在混凝土智能材料和纤维材料的称量中,混凝土搅拌站的计量准确度是至关重要的。
电子秤电路设计
电子秤电路设计电子秤是现代社会中广泛应用的一种衡量物品重量的设备,它具有高精度、稳定性强、易于读数等优点。
电子秤的核心部件是压电式传感器,传感器通过受力形变产生电信号,再经过信号处理器处理并转化为显示重量的数字。
因此,电子秤电路设计中压电式传感器与信号处理器是核心考虑因素。
一、压电式传感器的电路设计压电式传感器是通过物理变化产生电压信号,进而检测物体重量的设备。
根据工作原理,压电式传感器可分为电荷式和压力式两种。
电荷式传感器通过物理变化产生电荷,进而产生电压信号。
压力式传感器则是通过物理体积变化,产生电信号。
以下仅讨论压力式传感器的电路设计。
1.电路原理压力传感器主要由桥式电路、信号放大电路和滤波电路三部分组成。
(1)桥式电路:桥式电路分为有源桥式电路和无源桥式电路。
目前多采用无源桥式电路,因为它不需要外部电源,便于实现多点测量等多台组合共同测量。
(2)信号放大电路:传感器产生的电信号相当小,需通过信号放大器放大后才能有效的进行传输和处理。
(3)滤波电路:滤波器用于去除杂波、信号噪声等,保证电路稳定性和准确性。
常用的滤波器有低通滤波器和带通滤波器等。
2.电路参数(1)灵敏度:传感器允许工作范围内,重量变化所引起的电路输出变化量,常用的单位是mv/kg,kg/mv。
(2)非线性度:指传感器输出与实际值之间的误差,一般用±%来表示。
(3)零点漂移:指在重量不变的情况下,电路输出随时间漂移的程度,常用的单位是mV/h或%FS/h。
(4)灵敏度温漂:指在温度变化的情况下,灵敏度相对变化的情况,常用的单位是%RS/℃。
二、信号处理器的电路设计信号处理器是将传感器输出的电信号传输和处理的部分,主要问题是如何提高信号精度和稳定性。
1.放大电路设计放大电路是放大传感器输出信号的重要组成部分,合理的设计可以使信号精度和信噪比大大提高。
在放大电路中,需要考虑的几个问题:(1)增益大小:增益大小是决定信号放大倍数的关键因素,合理选择增益大小可以使信号精确到小数点后几位。
光电传感器电路设计中的非线性补偿方法

光电传感器电路设计中的非线性补偿方法引言:随着科技的发展,光电传感器在各种应用领域都得到了广泛的应用。
在光电传感器的电路设计中,非线性补偿是非常重要的一环。
由于光电传感器在不同工作条件下,输出信号的电压-光强度特性曲线可能会发生非线性畸变,而这可能会对传感器的性能和测量结果产生重大影响。
因此,采取适当的非线性补偿方法来修正这些非线性特性是至关重要的。
一、什么是光电传感器的非线性补偿当光电传感器在工作过程中,输出信号的电压-光强度特性曲线并非总是呈线性关系,而是会受到多种因素的影响而产生非线性的畸变。
这些因素可能包括电源波动、温度变化、器件参数变化以及电路中其他干扰源的存在。
非线性补偿的目的是通过采取一系列的补偿方法,使得输出信号的非线性变换能够得到有效的控制和修正。
二、非线性补偿方法的分类1. 数学模型法数学模型法是一种基于数学原理的非线性补偿方法。
通过对光电传感器输出信号的特性进行建模,可以根据建立的数学模型对非线性特性进行精确补偿。
常见的数学模型包括多项式模型、指数模型和对数模型等,其中多项式模型是最常用的一种。
采用数学模型法的优点是其理论基础较为牢固,准确性较高,能够适应不同的传感器和非线性特性。
然而,数学模型法需要进行比较复杂的计算和模型参数的优化,对硬件资源和计算能力有一定要求。
2. 数据修正法数据修正法是基于实验数据的非线性补偿方法。
通过预先获取光电传感器在不同光强度条件下的输出信号数据,可以对实验数据进行合理的加工和修正,从而得到补偿后的数据。
常见的数据修正方法包括插值法、拟合法和曲线拟合法等。
数据修正法的优点是简单易行,不需要太多的理论分析和计算,适用于一些对准确性要求相对较低的应用场景。
然而,数据修正法可能受到实验数据收集误差的影响,需要进行较多的实验和数据处理,提供的补偿结果可能存在一定的误差。
3. 模拟电路设计法模拟电路设计法是通过电路设计来实现非线性补偿的方法。
典型的非线性补偿电路包括自校正电路和非线性反馈电路。
称重传感器非线性误差自适应补偿方法

的载荷力有关, 因此在额定量程的上限区, 传感器的非线性误 差大。实际应用中, 在额定量程的下限区, 因受噪声及干扰信 号的影响, 称重的误差也较大, 而在额定量程的中间区, 由于 线性度较好, 因此误差小。为此设计了一种称重传感器自适 应非线性误差补偿方法, 获得了良好的补偿效果, 其原理框图 如图 2 所示。
g (Fx) Fx 称重传感器电 Uxi 称重传感器弹 Uxo 桥输出环节 性体环节 称重传感器 自适应 选择 自适应选择网络 x1 x2 x3 数字滤波 L (x1) RBFNN 非线 性误差补偿 ( f x3) 分段补偿网络 y
-
图1
称重传感器称重原理图
当称重传感器承受载荷, 且 4 个应变片的阻值相等时, 有: ìR1 = R 2 = R3 = R 4 = R ïDR = DR = DR 3 ï 2 (2) íDR1 = DR 4 = μDR ï Ki F x D R ï = Ki ε = ES îR 式中, Fx 为称重传感器承受的载荷力, ∆R 为应变片的电阻变化 值, Ki 为应变片的应变灵敏度, S 为弹性体的横截面积, E 为弹
1
引言
电阻应变式称重传感器为称重系统的关键部件之一, 它
大误差。 径向基函数神经网络 (RBFNN) 具有很强的逼近非线性函 数和自学习功能, 收敛速度快, 鲁棒性好, 无局部极小点, 已广 泛应用于系统建模、 非线性校正与补偿等、 函数逼近等[4-7]。同 时考虑到称重传感器非线性误差的特性, 提出了一种基于 RBFNN 的称重传感器非线性误差自适应补偿方法, 建立非线 性误差分段补偿模型, 以获得良好的补偿效果。
杨进宝, 汪鲁才: 称重传感器非线性误差自适应补偿方法
柱式称重传感器的非线性误差及其线性
科 技 应 用
5! 8 5" 8 5$ 8 5 当圆柱式弹性元件承受拉向载荷作用时, 应变区 产生的拉伸、 压缩应力使桥臂的电阻发生变化, 即 (7 9 !) 57 8 5" 8 5 (7 : "!) (7) 5$ 8 5! 8 5 将电桥分为两部分, 在 ;*4 半个电桥中, ;4 间 的电压降为 <, 5! 上的电压降为 5! < 57 9 5! 同理, 在 ;=4 半个电桥中, ;4 间的电压降也是 <*4 8 <, 5" 上的电压降为 5" < 5" 9 5$ 电桥输出电压是 <=4 与 <;4 之间的差, 则 <=4 8 5" 5! (!) <: < 5" 9 5$ 57 9 5! 电桥的相对输出, 即称重传感器的灵敏度为 > 8 <=4 : <*4 8 > 5" 5! 8 : < 5" 9 5$ 57 9 5! (" ) (7 ) 式代入 式, 得 将 /8 /8 8 (")
# # # #
/ )1+ % &’ !(! ) & 0 #’ -!! + 2 从式(1 )可以看出,电桥的相对输出与应变之间是 非线性关系, 只有在 ! 足够小时, 他们之间才呈线性 关系, 即 / % &’ !(! 2 (1 ) (- ) 比较 、 两式, 其非线性误差为 .% !& % &’ !(! 0 &’ !(! ) & 0 #’ -!! + % #’ -!! &’ !( !
年 第 "" 卷 第 ! 期
传感器信号的线性化处理与非线性补偿_贾智伟
电子科技传感器信号的线性化处理与非线性补偿空军工程大学工程学院(西安710038) 贾智伟 汪 诚北方交通大学(北京100044) 刘红飞 摘 要 主要介绍了两种对传感器输出信号进行线性化处理的方法;同时,对传感器不可避免的非线性提出了线性补偿的方法。
关键词 传感器 非线性 线性化1 概述 在数字仪表中,对非电量的数字化测量所使用的传感器的一个重要指标就是数据的线性化。
但对于传感器来说,输出信号的非线性是绝对的。
这势必难以保证系统的精度与准确度,有时还得规定传感器的使用范围。
为了提高仪器和系统的精度,扩大其使用范围和提高系统的性能价格比,对传感器输出信号或其他模拟信号进行线性化处理与非线性补偿就显得尤为重要。
对传感器信号的线性化处理与非线性补偿方法比较多,但是大都存在如下缺点:电路复杂并且代价也高,从而不利于工程实际。
本文介绍的对传感器输出信号进行线性化处理与非线性补偿的方法,不仅精度高,而且还具有电路简单等优点。
2 线性化处理2.1 函数运算法有些类型的传感器的系统特性可以用函数关系来表示,对于此种类型的传感器,可以把其运算规则(反函数的)存入系统的微处理器,这样每测得一个参量,就可以通过处理器的计算得到一个需要的相应物理量。
例如振筒式传感器的输出信号(频率F)和输入信号(压强P)存在如下的函数关系:F=F01+KP把它的反函数关系存入系统中的处理器后,当测得一个F量时,经过计算就可以得到所需要的P值。
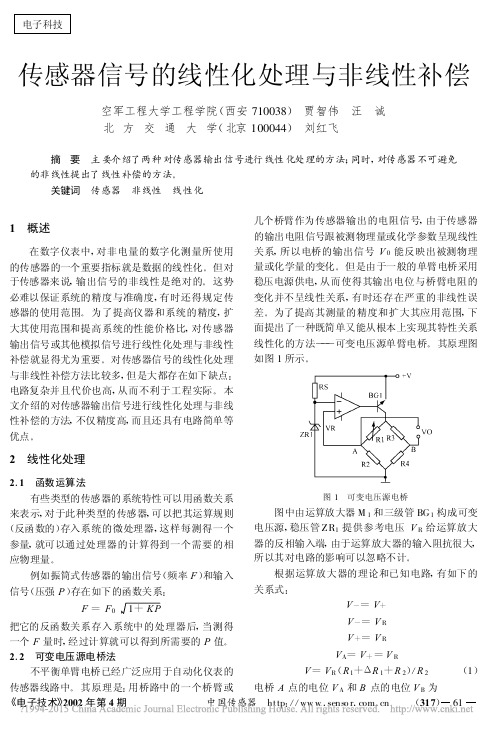
2.2 可变电压源电桥法不平衡单臂电桥已经广泛应用于自动化仪表的传感器线路中。
其原理是:用桥路中的一个桥臂或几个桥臂作为传感器输出的电阻信号,由于传感器的输出电阻信号跟被测物理量或化学参数呈现线性关系,所以电桥的输出信号V0能反映出被测物理量或化学量的变化。
但是由于一般的单臂电桥采用稳压电源供电,从而使得其输出电位与桥臂电阻的变化并不呈线性关系,有时还存在严重的非线性误差。
为了提高其测量的精度和扩大其应用范围,下面提出了一种既简单又能从根本上实现其特性关系线性化的方法———可变电压源单臂电桥。
称重传感器的基本原理及非线性误差补偿方法

2019年第2期农机使用与维修17输出电压为零。
当称重传感器负载,弹性敏感元件的应变会引起电阻应变片产生形变,理论情况下,负载力与电阻应变片的应变量应该成正比关系,但受到加工和安装以及材料的非线性影响,使负载力与应变量呈现一定的非线性关系。
此时图中的电阻应变片队和R4被拉伸,电阻值增大,而R2、R3被压缩,电阻值减小。
由于不同位置的电阻发生改变,此时电桥失去平衡,传感器会生成并输出压力测量电压U2,由于U2与所受负载成非线性关系,当负载越大,称重传感器的非线性误差也就越大[2]。
U图1电阻式压力传感器结构原理2.2非线性误差补偿方案为减少称重传感器非线性误差的影响,通过一定的技 术手段提升称重传感器输人和输出的线性关系程度,以保 证传感器工作过程的准确性和可靠性,提高测量、传输和 控制过程的稳定性。
对于称重传感器非线性误差的补偿 方法很多,按照补偿形式大体可以分为硬件补偿和人工神 经网络软件补偿两大类。
硬件补偿主要是利用一定的元器件或电子线路进行 非线性误差的矫正,其特点是相对简单便捷,是传统称重 传感器非线性误差补偿的常用方法。
随着生产力的不断 进步,工业上对称重传感器的非线性误差补偿精度提出了 更高的要求。
由于硬件补偿受到电子器件漂移和技术能 力的影响,难以做到全程补偿,其在准确性和可靠性上难 以满足更高的要求标准,因此,利用更新的计算机技术和 函数原理的软件补偿方式被快速开发。
近年来,通过神经 网络对称重传感器进行非线性误差补偿受到了越来越多 专业人士的重视,人工神经网络的函数逼近功能说明:对 于任意的连续函数或映射关系,必然会存在一个3层的前 向网络,能够以任意准确度逼近此函数或映射关系,如图 2所示。
除上述两种补偿方式外,还可通过多项式拟合法 和建立传感器的分度表的方法实现非线性误差的补偿,但 由于多项式拟合法复杂程度高,传感器分度表的存储器容 量有限,现阶段的使用量也都在逐渐减少[3]。
传感器的非线性补偿

aj
解此方程组,可得到n+1个系 而可得到插值多项式 pn ( x)
,从
6.5传感器的非线性补偿
为了便于计算,实际中最常用的是线性多项式插值方法,这时, p1 ( x) a1 x a0 n=1,多项式变为 采用线性插值方法,相当于在传感器的两个相邻标定点 xi , yi 和 xi 1, yi 1 之间用直线相连,在区间 xi , xi 1 内用 p1 ( x)代替 f ( x)去计算传感器的输入值y。若传感器有n+1个标定点,则 可建立n个区间(区间长度可相等,也可不等),各区间上的线 性插值多项式为
6.5传感器的非线性补偿
软件补偿方法:计算法和查表法
1.计算法。当输出电信号与传感器的参数之间有确定的数字表达式时,就可 采用计算法进行非线性补偿。即在软件中编制一段完成数字表达式计算的程 序,被测参数经过采样、滤波和标度变换后直接进入计算机程序进行计算, 计算后的数值即为经过线性化处理的输出参数。 2查表法。在机电一体化测控系统中, 有些参数的计算是非常复杂的,如一些 非线性参数,它们不是用一般算术运算 就可以算出来的,而需要涉及到指数、 对数、三角函数、积分以及微分等运算, 所有这些运算用汇编语言编写程序都比 较复杂,有些甚至无法建立相应的数学 模型。为了解决这些问题,可以采用查 表法。
0 1
设 pn( x) 是次数不超过n的代数多项式,即
pn ( x) an xn an1xn1 ... a1x0 a0
6.5传感器的非线性补偿
由于 xi (i 0,1, 2, , n) 处应 满足 pn ( xi ) f ( xi ) ,则将 xi 带入上式可得关于系数 a j ( j 0,1, n) 的n+1元一次方程。