现代控制理论第3版刘豹唐万生机械工业出版社课后全部答案
《现代控制理论》刘豹著(第3版)课后习题答案(最完整版)
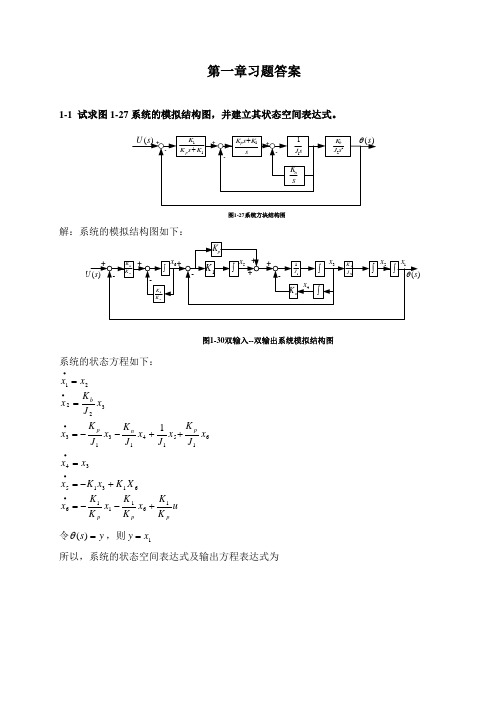
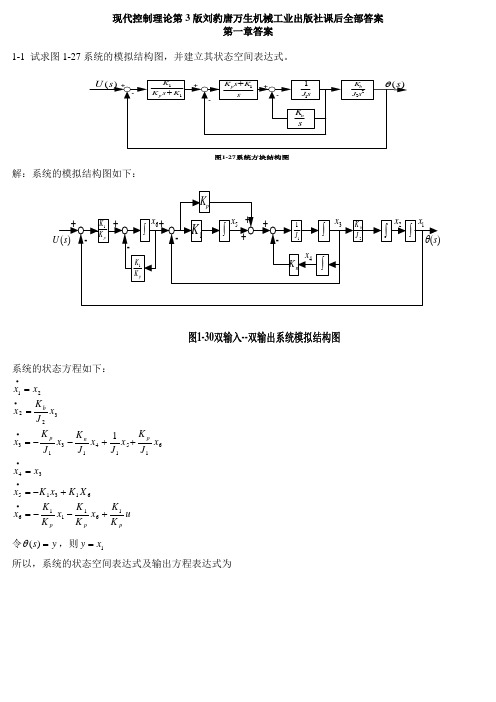
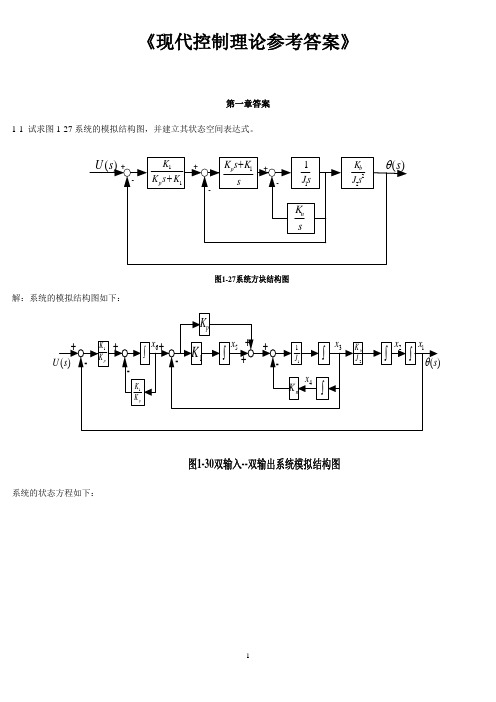
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
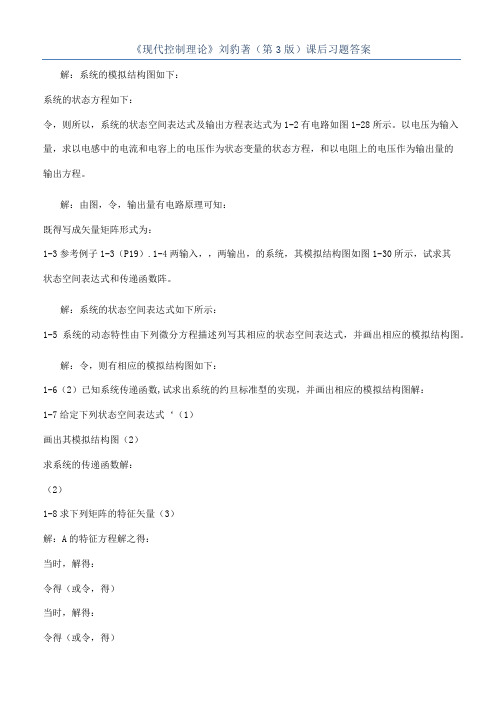
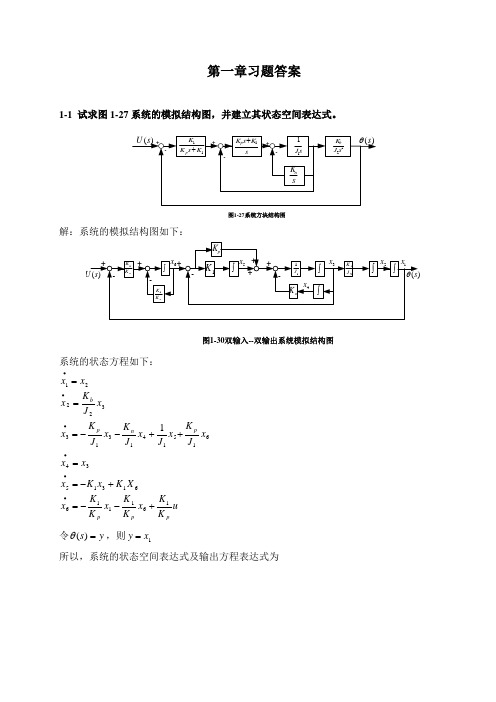
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L LR x x x 。
中国石油大学(华东)现代控制理论课后习题参考答案-刘宝、唐万生第三版
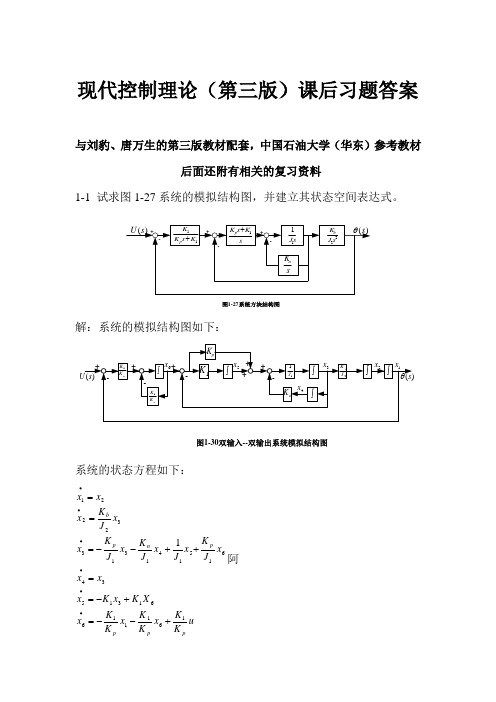
现代控制理论(第三版)课后习题答案与刘豹、唐万生的第三版教材配套,中国石油大学(华东)参考教材后面还附有相关的复习资料1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论第3版(刘豹_唐万生)课后答案资料
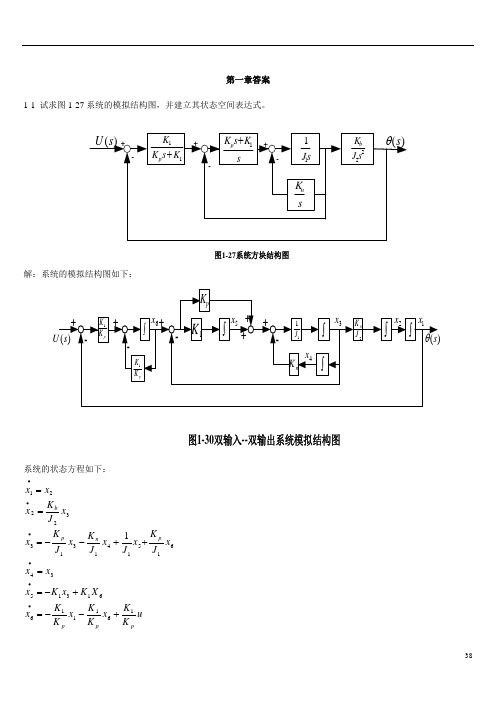
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》刘豹著(第3版)课后习题答案
《现代控制理论》刘豹著(第3版)课后习题答案解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
现代控制理论第3版刘豹唐万生课后全部答案机械工业出版社
现代控制理论第3版刘豹唐万生机械工业出版社课后全部答案第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K K K K K J K J J K J KJ K x x x x x xp p pp n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
(完整word版)《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》刘豹著(第3版)课后习题答案(最完整版)
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K K K K K J K J J K J KJ K x x x x x xp p pp n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》刘豹著(第3版)课后习题答案

《现代控制理论》刘豹著(第3版)课后习题答案解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Kp
+ U(s) -
K1 +
Kp
-
∫ x6+ -
K1
K1 Kp
∫
x5 + +
+ -
1 J1
∫ x3
Kb J2
Kn x4 ∫
∫
x2
x1
∫ θ(s)
图1-3 0 双 输 入 - - 双输出系统模拟结构图
系统的状态方程如下:
•
x1 = x2
•
x2
=
Kb J2
x3
•
x3
= − Kp J1
⎢ ⎢
x5
⎥ ⎥
⎢⎣x6 ⎥⎦
0 0⎤
0
1 J 0 0
0
0
Kp J1 0
K1 − K1
Kp
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡
x1 x2 x3 x4 x5 x6
⎥⎦
⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥⎦
+
⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢⎣
0
0
0
0 0 K1 Kp
⎤ ⎥ ⎥ ⎥ ⎥⎥u ⎥ ⎥ ⎥ ⎥⎦
y1
a2
a5
a6
1
u2
b2
+--
∫
+
+
∫
y2
a3
a4
图1-3 0 双 输 入 - - 双 输 出 系 统 模 拟 结 构 图
解:系统的状态空间表达式如下所示:
⎡ẋ1 ⎤ ⎡ 0 1 0 0 ⎤⎡ x1 ⎤ ⎡ 0 0 ⎤
⎢ ⎢
ẋ2
⎢ ẋ3
⎥ ⎥ ⎥
=
⎢⎢− a2 ⎢1
− a1 0
0 0
−
a6
⎥ ⎥
=
−4 (s + 3)2
+
− 3+
s+3
3 s+2
+
3 s
⎡ ẋ1 ⎤ ⎡− 3 1 0 0⎤⎡x1 ⎤ ⎡0⎤
⎢ ⎢
ẋ2
⎥ ⎥
⎢ ẋ3 ⎥
=
⎢ ⎢ ⎢
0 0
−3
0
0⎥⎥
⎢⎢x2
⎥ ⎥
+
⎢⎢1⎥⎥u
0 − 2 0⎥⎢x3 ⎥ ⎢1⎥
⎢ ⎣
ẋ4
⎥ ⎦
⎢ ⎣
0
0
0
0⎥⎦
⎢⎣x4
⎥ ⎦
⎢⎣1⎥⎦
⎡ x1 ⎤
现代控制理论部分课后习题答案
现代控制理论第 3 版刘豹唐万生机械工业出版社课后全部答案 第一章答案
1-1 试求图 1-27 系统的模拟结构图,并建立其状态空间表达式。
U (s) +
-
K1
+
Kps +K1 +
1
K ps + K1
s
-
-
J1s
Kn s
Kb θ(s)
J2s2
图1-2 7 系 统 方 块 结 构 图
⎢⎢x2
⎥ ⎥
+
⎢⎢b1
0
⎥ ⎥u
1 ⎥⎢x3 ⎥ ⎢ 0 0 ⎥
⎢ ⎣
ẋ4
⎥ ⎦
⎢ ⎣
0
− a5
− a4
−
a3
⎥ ⎦
⎢⎣x4
⎥ ⎦
⎢ ⎣
0
b2
⎥ ⎦
⎡ x1 ⎤
y = [1
0
1
0]⎢⎢x2
⎥ ⎥
⎢ x3 ⎥
⎢⎣x4
⎥ ⎦
⎡ s −1 0 0 ⎤
(sI − A) = ⎢⎢a2
s + a1
0
a6
⎥ ⎥
p21
⎥ ⎥
⎢⎣1 − 1 3 ⎥⎦⎢⎣ p31⎥⎦ ⎢⎣ p31⎥⎦
解之得 p21 = p31 = p11 令 p11 = 1
得
⎡ p11⎤ ⎡1⎤
P1
=
⎢ ⎢
p21
⎥ ⎥
=
⎢⎢1⎥⎥
⎢⎣ p31⎥⎦ ⎢⎣1⎥⎦
⎡4
当 λ2 = 3时, ⎢⎢1
1 0
− 2⎤⎡ p11 ⎤ ⎡ p11 ⎤ ⎡1⎤
2
x3
−
Kn J1
x4
+
1 J1
x5
+
Kp J1
x6
•
x4 = x3
•
x5 = −K1 x3 + K1 X 6
•
x6
= − K1 Kp
x1
−
K1 Kp
x6
+
K1 Kp
u
令θ (s) = y ,则 y = x1 所以,系统的状态空间表达式及输出方程表达式为
⎡ ⎢
•
x1
⎢ ⎢
•
x2
•
⎢ ⎢
x3
•
⎢x4 ⎢•
•
x1 = x2 + C x3
R 和以电阻 2 上的电压作为输出量的输出方程。
i 解:由图,令 1 = x1 , i2 = x2 , uc = x3 ,输出量
y = R2 x2
•
x1
=
−
R1 L1
x1
−
1 L1
x3
+
1 L1
u
•
x2
=−
R2 L2
x2
+
1 L2
x3
•
1
1
x3 = − C x1 + C x2
得
(或令
p12
= 1,得 P2
=
⎡ p12 ⎤
⎢ ⎢
p
22
⎥ ⎥
⎢⎣ p32 ⎥⎦
=
⎡ ⎢
1
⎤ ⎥)
⎢− 2⎥
⎢1⎥
⎢⎣ 2 ⎥⎦
当 λ1
=
−3
时,
⎡ ⎢
⎢
0 3
1 0
0 ⎤⎡ p13 ⎤ ⎡ p13 ⎤
2
⎥ ⎥
⎢ ⎢
p23
⎥ ⎥
=
−3⎢⎢
p23
⎥ ⎥
⎢⎣− 12 − 7 − 6⎥⎦⎢⎣ p33⎥⎦ ⎢⎣ p33⎥⎦
s(s + 3)
⎥
1
⎥ (s + 3)(s + 2)(s + 1)
⎢⎣(2s + 1)(s + 3)⎥⎦
(2s + 1) =
(s + 2)(s + 1)
1-8 求下列矩阵的特征矢量
⎡ 0 1 0⎤
(3)
A
=
⎢ ⎢
3
0
2
⎥ ⎥
⎢⎣− 12 − 7 − 6⎥⎦
现代控制理论部分课后习题答案
解:A 的特征方程
⎥ ⎥
⎢ ⎢
p21
⎥ ⎥
=
3⎢⎢
p21
⎥ ⎥
+ ⎢⎢1⎥⎥
⎢⎣1 − 1 3 ⎥⎦⎢⎣ p31 ⎥⎦ ⎢⎣ p31 ⎥⎦ ⎢⎣1⎥⎦
解之得 p12 = p22 + 1, p22 = p32 令 p12 = 1
得
⎡4
当 λ3 = 1 时, ⎢⎢1
1 0
− 2⎤⎡ p13 ⎤ ⎡ p13 ⎤
2
⎥ ⎥
⎢ ⎢
⎢−1 0 s −1⎥
⎢ ⎣
0
a5
a4
a3
⎥ ⎦
⎡ s − 1 0 0 ⎤ −1 ⎡ 0 0 ⎤
Wux (s)
=
(sI
−
A)−1 B
=
⎢ ⎢
a
2
⎢−1
s + a1 0
0 s
a6
⎥ ⎥
⎢⎢b1
− 1⎥ ⎢ 0
0
⎥ ⎥
0⎥
⎢ ⎣
0
a5
a4
a3
⎥ ⎦
⎢ ⎣
0
b2
⎥ ⎦
⎡s
−1
0
0
−1
⎤
⎡
0
0⎤
Wuy (s) = C(sI − A)−1 B = [1
⎤ ⎥ ⎥ ⎥⎦
解:A 的特征方程
⎡λ − 4 − 1 2 ⎤
λI
−
A
=
⎢ ⎢
−1
λ
−
2
⎥ ⎥
=
(λ
− 1)(λ
− 3)2
=0
⎢⎣ − 1 1 λ − 3⎥⎦
λ1,2 = 3, λ3 = 1
λ = 3 当 1
时, ⎡4 1 − 2⎤⎡ p11 ⎤ ⎡ p11 ⎤
⎢⎢1 0
2
⎥⎢ ⎥⎢
p21
⎥ ⎥
=
3⎢⎢
2
⎥ ⎥
⎢⎣0 1 − 1⎥⎦⎢⎣5 3⎥⎦ ⎢⎣− 3 4 ⎥⎦
⎡1 1 0⎤
CT
=
⎡1 ⎢⎣0
2 1
x1 x2 x3
⎤ ⎥ ⎥ ⎥⎦
+
⎡ ⎢ ⎢ ⎢ ⎢ ⎢⎣
1 L1 0
0
⎤ ⎥ ⎥⎥u ⎥ ⎥⎦
-1-
现代控制理论部分课后习题答案
u u y y 1-4 两输入 1 , 2 ,两输出 1 , 2 的系统,其模拟结构图如图 1-30 所示,试求其状态空间表达式和传递函
数阵。
u1
b1 +
∫
-
--
a1
∫
⎡ λ −1 0 ⎤
Байду номын сангаас
λI − A = ⎢⎢− 3 λ
−2
⎥ ⎥
=
λ3