履带式机器人结构设计答辩稿
多功能履带式机器人设计

摘要:随着我国改革开放的不断开展,我国经济建设和技术应用都得到了高速稳定的发展,机器人已成为制造加工行业必不可少的关键设备,机器人可以分为关节机器人和移动机器人两种,关节机器人通常情况下是固定不动的,所以其工作范围非常局限,而移动机器人恰恰克服了这一技术难题,随时随地的移动大大的增加了机器人的使用区间,使得机器人能够更加方便快捷的完成各项任务。
移动机器人相比普通关节机器人增加了移动机构,移动的方式多种多样,有腿式移动机构,轮式移动机构,履带式移动机构等等,选择何种移动方式决定了移动机器人的工作性质和内容。
本篇论文中提出了一种结构巧妙、机动性好、稳定性能高的多功能履带式机器人设计方案,本方案对履带式机器人技术进行深入分析研究,其工作原理是:利用履带式机器人的双节双履带进行支撑机器人本体进行移动,通过调整两节履带的角度来翻越障碍,最终实现机器人自由移动的目的。
多功能履带式机器人作为一种新型的移动机器人,对此进一步的研究也是不能忽视的。
关键词:机器人;移动机器人;履带式机器人AbstractWith the continuous development of China's reform and opening up, China's economic construction and technology applications have been high-speed and stable development, the robot has become a manufacturing and processing industry essential essential equipment, robots can be divided into joint robot and mobile robot two, joint robot Usually the case is fixed, so its working range is very limited, and mobile robots just to overcome this technical problems, anytime, anywhere the mobile greatly increased the use of the robot range, making the robot can more quickly and easily complete the task.Compared with the common robot, the mobile robot has increased the movement mechanism, the movement way is varied, the leg movement mechanism, the wheel movement mechanism, the crawler movement mechanism and so on. What kind of movement mode is selected determines the working nature of the mobile robot and content. This paper presents a multi-functional crawler robot design scheme with clever structure, good mobility and high stability. The scheme is based on the deep analysis of the crawler robot technology. The working principle is that the use of the double- Section of the double track to support the robot body to move, by adjusting the angle of the two tracks to cross the obstacles, and ultimately achieve the purpose of free movement of the robot. Multi-function crawler robot as a new type of mobile robot, this further study can not be ignored.Keywords: robot,Mobile robots, Crawler robots目录Abstract (II)目录 (III)第一章绪论 (1)1.1 引言 (1)1.2移动机器人的发展概况 (1)1.3 Solidwork软件的介绍 (2)1.4 有限元分析的介绍 (3)1.5 课题研究的意义及目的 (4)第二章多功能履带式机器人的设计 (5)2.1 多功能履带式机器人的设计要求 (5)2.2多功能履带式机器人的设计概述 (5)2.2.1多功能履带式机器人与其他类型移动机器人原理的对比 (5)2.2.2多功能履带式机器人与其他类型移动机器人特点的对比 (8)2.2.3 多功能履带式机器人的设计参数 (8)2.3多功能履带式机器人的具体设计 (8)2.3.1 机器人底座结构设计 (9)2.3.1.1行走电动机的设计与选型 (9)2.3.1.2减速器齿轮的设计 (12)2.3.1.3齿轮齿数的选择 (13)2.3.1.4直齿圆柱齿轮静力及接触分析的理论计算 (14)2.3.1.5直齿轮静力及接触的有限元分析 (17)2.3.1.6链传动的设计 (19)2.3.2机械手臂结构设计 (21)2.3.2.1机械手臂转动电机的设计与选型 (21)2.3.2.2机械手臂转动结构的设计 (23)第三章总结与展望 (24)参考文献 (24)第一章绪论1.1 引言随着我国改革开放的不断开展,我国经济建设和技术应用都得到了高速稳定的发展,机器人应用的地方变得越来越多,从单一的生产制造业发展到各行各业,甚至延伸到排爆等危险的具体工作。
机械课程设计答辩提问内容
机械课程设计答辩提问内容一、课程目标知识目标:1. 学生能理解并掌握机械设计的基本原理,包括力学、材料力学、机械制图等核心知识。
2. 学生能够运用所学知识,分析并解决简单的机械设计问题,如齿轮传动、凸轮机构等。
3. 学生能了解并描述不同机械结构的优缺点及其适用场合。
技能目标:1. 学生能够运用CAD软件进行基本的机械设计和制图,具备一定的计算机辅助设计能力。
2. 学生通过课程设计实践,掌握机械设计的步骤和方法,具备初步的设计与创新能力。
3. 学生能够在团队中有效沟通与协作,完成课程设计任务。
情感态度价值观目标:1. 培养学生对机械设计的兴趣和热情,激发他们探索机械领域的好奇心。
2. 培养学生面对设计挑战时的耐心和毅力,鼓励他们勇于尝试和改进。
3. 培养学生的工程意识,让他们认识到机械设计在国家和经济发展中的重要性,增强社会责任感。
本课程针对高年级学生,在掌握基础机械知识的基础上,注重培养学生的实践能力和创新精神。
课程性质为实践性、综合性,要求学生在理解理论知识的同时,注重实际操作和团队协作。
通过课程目标的设定,旨在使学生能够将所学知识应用于实际机械设计过程中,提高解决实际问题的能力。
教学要求注重理论与实践相结合,鼓励学生主动探索、积极思考,以培养适应社会需求的机械设计人才。
二、教学内容本课程教学内容主要包括以下几部分:1. 机械设计基本原理:涵盖力学、材料力学、机械制图等基础知识,以课本相关章节为依据,深入讲解机械设计的基本原理。
2. 机械设计方法与步骤:介绍机械设计的一般流程,包括需求分析、方案设计、详细设计、制作与调试等,结合教材实例进行分析。
3. 常用机械传动机构:讲解齿轮传动、皮带传动、链传动等常用传动机构的特点、选用原则及设计方法,参考教材相应章节。
4. 机械结构设计:分析不同机械结构(如轴、轴承、联轴器等)的设计原则,结合教材案例进行讲解。
5. 计算机辅助设计(CAD):教授CAD软件的基本操作,以实际机械设计项目为例,指导学生完成图纸绘制。
履带式机器人结构设计答辩稿

驱动轮与履带
根据地形和负载需求,设计合 适的驱动轮和履带配置,提高
牵引力和抓地力。
速度与加速度控制
实现精确的速度和加速度控制 ,确保机器人在不同环境和任
务中稳定运行。
能量回收
利用制动或滑行时的能量回收 技术,提高能源利用效率。
控制系统设计
主控制器
选择强大而可靠的主控制器, 能够处理复杂的运动控制和感
特点
履带式机器人具有较好的地形适 应性和稳定性,能够在崎岖不平 的地形上行走,同时具有较高的 牵引力和载重能力。
履带式机器人结构设计的重要性
提高机器人的地形适应性
提升机器人的工作效率
合理的履带式机器人结构设计能够使 机器人在各种复杂地形和环境中自由 移动,提高其适应性和实用性。
合理的履带式机器人结构设计能够提 高机器人的工作效率,使其在执行任 务时更加高效和可靠。
需求整理
将收集到的需求进行分类、筛选和整理,明确设 计目标和技术指标。
需求评审
邀请专家或团队成员对整理后的需求进行评审, 确保需求的合理性和可行性。
概念设计
01
02
03
方案制定
根据需求分析的结果,制 定多个可行的概念设计方 案。
方案评估
对每个概念设计方案进行 技术评估,包括性能、成 本、可实现性等方面。
知数据处理任务。
传感器融合
整合多种传感器数据,实现精 准的环境感知和定位导航。
人机交互界面
设计直观的人机交互界面,方 便远程操控和实时监控机器人 状态。
安全控制策略
制定完善的安全控制策略,确 保机器人在执行任务时不会对
人员或环境造成伤害。
传感器系统设计
传感器类型选择
履带式移动机器人底盘机械结构设计
、
≥ 2 0 k g
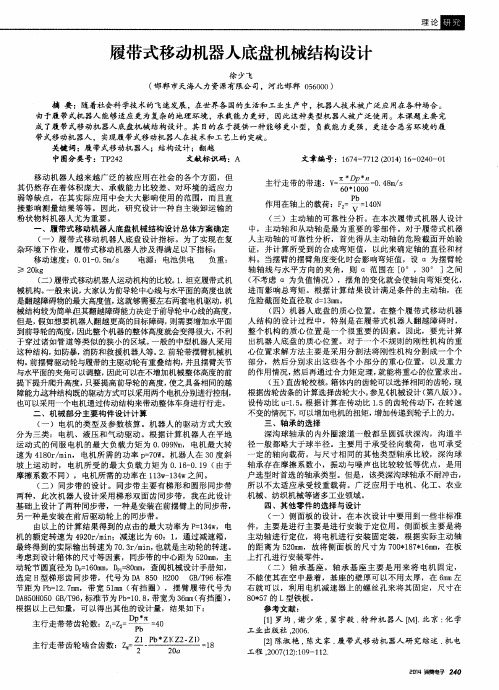
( 二) 履带式移动机器人运动机构 的比较。 1 . 坦克履带式机 械 机构。 一般 来说 , 大家认为前导轮中心线与水平面 的高度也就 是翻越 障碍物的最大高度值, 这就够需要左右两套 电机驱动 , 机 械 结构较为简单 但其翻越障碍能力决定于前导轮 中心线的高度, 但 是, 假 如 想 要 机器 人 翻 越 更 高 的 目标 障 碍 , 则 需 要增 加 水平 面 到前导轮 的高度 , 因此整个机器的整体高度就会变得很大 , 不利 于穿过诸如 管道等类似的狭小的区域。 一般 的中型机 器人 采用 这种结构, 如防暴, 消防和救援机器人等。 2 . 前轮带摆臂机 械机 构。 前摆臂驱动轮与履带的主驱动轮有重 叠结构, 并且摆 臂关节 与水平面的夹角可以调整 , 因此可以在不增加机械整体高度的前 提下提升爬升高度, 只要提高前导轮的高度, 使之具备相 同的越 障能力这种结构既的驱动方式可 以采用两个电机分别进行控制, 也可以采用一个电机通 过传动结构来带动整体车身进行行走 。 二、机械部分主要构件设计计 算 ( 一 )电机 的类型及 参数核算 。机 器人 的驱动方式大致 分 为三 类 :电机 、液压和气 动驱动 。根据 计算机 器人在平地 运 动式 的伺服 电机 的最 大负 载力矩 为 0 . 0 9 9 N m , 电机 最大转 速为 4 1 8 0 r / m i n , 电机 所需 的功率 p = 7 0 W 。机 器人在 3 0度斜 坡上 运动 时 ,电机所受 的最 大负载 力矩 为 0 . 1 6 — 0 . 1 9( 由于 摩擦系数不 同),电机所 需的功率在 1 1 3 w - 1 3 4 w之 间。 ( 二 )同步 带的设计 。同步带主要有 梯形和 圆形 同步带 两 种 ,此 次 机 器 人 设 计 采 用 梯 形 双 面 齿 同 步 带 ,我 在 此 设 计 基础上设计 了两种 同步带,一种是安装在前摆 臂上的同步带, 另一种是安装在前后驱动轮上 的同步带 。 由 以上 的计算 结果得到 的点击 的最大功率 为 P = 1 3 4 w ,电 机 的额定转速 为 4 9 2 0 r / m i n ;减速 比为 6 0 :1 ,通过减速箱 , 最终得到的实际输出转速 为 7 0 . 3 r / m i n , 也就是主动轮的转速。 考虑到设计箱体的尺寸等因素,同步带 的中心距为 5 2 0 m m ,主 动轮节圆直径为 D p = 1 6 O m m ,D p 1 = 8 0 m m ,查阅机械设计手册知 , 选定 H型梯形齿 同步带 ,代号 为 D A 8 5 0 H 2 0 0 G B / T 9 6标准 节距 为 P b = 1 2 . 7 m m ,带 宽 5 1 m m( 有 挡 圈),摆臂履 带代 号为 D A 8 5 0 H 0 5 0 G B / T 9 6 , 标准节为 P b = l O . 8 , 带 宽为 3 6 m m( 有挡圈 ) , 根据 以上 已 知量 ,可 以得 出其 他 的设 计 量 ,结 果 如 下 :
适用于机器人工业机器人毕业设计答辩模板

机器人工业机器人
学校名称:XXX
指导老师:XXX 报告人:XXX
1
选题背景
点击此处添加文本内容,如关键词、部分简单介绍等。
目录
CONTENTS
2 3 4 5
作品概述
点击此处添加文本内容,如关键词、部分简单介绍等。
制作过程
点击此处添加文本内容,如关键词、部分简单介绍等。
B
D
标题数字等都可以通过点击和重新输入 进行更改,顶部“开始”面板中可以对 字体、字号、颜色等进行修改。建议正 文8-14号字,1.3倍字间距。
标题数字等都可以通过点击和重新输入 进行更改,顶部“开始”面板中可以对 字体、字号、颜色等进行修改。建议正 文8-14号字,1.3倍字间距。
点击此处添加标题
PART
制作过程
A
C
点击此处添加标题
标题数字等都可以通过点击和重新输入 进行更改,顶部“开始”面板中可以对 字体、字号、颜色等进行修改。建议正 文8-14号字,1.3倍字间距。
点击此处添加标题
标题数字等都可以通过点击和重新输入 进行更改,顶部“开始”面板中可以对 字体、字号、颜色等进行修改。建议正 文8-14号字,1.3倍字间距。
B
点击此处添加标题
标题数字等都可以通过点击和重新输入进行 更改,顶部“开始”面板中可以对字体、字 号、颜色等进行修改。
C
D
选题背景
点击此ห้องสมุดไป่ตู้添加标题
更换图片方法:点击图片后右键,选择“更改图片”即可。 标题数字等都可以通过点击和重新输入进行更改,顶部“开 始”面板中可以对字体、字号、颜色等进行修改。建议正文 8-14号字,1.3倍字间距。标题数字等都可以通过点击和重 新输入进行更改,顶部“开始”面板中可以对字体、字号、 颜色等进行修改。建议正文8-14号字,1.3倍字间距。
一种履带式机器人设计及其越障分析_朴春日

四摆臂式机器人比其他类型的履带式机器人能跨越 相对更 高 的 障 碍 物 ,因 为 它 有 前 、后 两 个 摆 臂 可 用 来 进行辅助越障,其越障的机理 是 利 用 机 器 人 的 履 带 行走机构将机器人抬升至障 碍 物 的 外 角 线,并 通 过 攀爬动作使机器人的质心越过障碍物的外角线完成 越障[5]。六 履 带 四 摆 臂 式 机 器 人 越 障 过 程 如 图 5 所示。
不易翻倒与卡 阻[2]。 国 内 的 一 些 履 带 式 机 器 人 采 用 拖缆供电通讯的形式,对其在管道中运行的灵活性产 生了一定的影响。
本文设计的六履带四摆臂机器人,旨在用于核工 业管道内壁情况的检查。由于管道内部环境复杂,有 台阶、碎 石 以 及 放 射 性 污 染,所 以 需 要 机 器 人 在 管 道 内具有较强的越障和跨沟能力,并具有无线遥控和图 像采集等功能。
图 3 控制系统结构
履带式机器人的通信系统对于整个系统的稳定 运行起着至关重要的作用。为了便于机器人的行动,
25
2013 年第 3 期
现代制造工程( Modern Manufacturing Engineering)
遥控计算机与机器人之间采用无线通信方式。机器 人的通信设备包括两个双工数据传输的无线通信模 块 FHL0611、无线影音发射模块 T505 和无线图像接 收模块 MR18_V2. 0,它们分别安装在主车体和中心控 制计算机上。无线通信模块采用 433MHz 的工作频率 和串行传输的工作方式,传输距离约为 150m。无线图 像传输模块采用 2. 4GHz 频率,可在 150m 范围内有效 地传输视频信号。 1. 2. 2 控制系统软件设计
欧洲航天局的固定履带式机器人 Nanokhod 移动 时与 地 面 有 很 好 的 摩 擦 因 数,稳 定 性 也 很 高,具 有 很 好的越障 能 力,且 结 构 简 单。 但 是,在 转 弯 时 会 存 在 很大的摩擦损失,机动性较差。美国 iRobot 公司生产 的 Packbot 系列机器人[1],采用了两条主履带和两条 摆臂履带的形式,因受到摆臂数量的限制只能攀爬高 度较低的障碍物。日本千叶工业大学研制的搜救机 器人“木槿”,采用两条主履带和前后两对独立摆动履 带的 形 式,且 两 条 主 履 带 较 宽,将 机 器 人 主 体 部 分 包 裹,形成全身履带机器人,可以在复杂的环境中行驶,
机械创新设计答辩概诉

日
期: 2015年07月05日
题 目: 爬壁机器人的原理与设计 组 长: 刘兵 组 员:梁从军、李庆、铁李勇、邓再林 专 业: 机械设计制造及其自动化 班 级: 1302班 指导教师: 李军 方轶琉
背景及意义
背景
从20世纪50年代起,为了外形美观,同时也为了得到更好的 采光效果,许多高层建筑大量采用了玻璃幕墙和光滑大理石 等建筑材料,现在的外墙的材质主要有玻璃幕、复合铝合板、 大理石、花岗岩、马赛克、瓷片、干粘石、水刷石等。由于 空气中的灰尘、油污以及酸雨的侵蚀,往往使一栋新建的大 楼在短时间内变得脏污不堪,在一些空气污染比较严重的城 市更是如此。 这就带来了玻璃壁面的外部清洗问题。同时加上楼层设计的 高度影响,给其外部墙壁清扫带来了诸多不便同时亦增加了 进行常规人工清洁操作的危险性。
致谢
两个星期的地基处理课程设计很快就结束了,经 过各位老师的悉心指导和精心教导,在设计的过 程中,我已经对机械设计有了深刻认识,也学习 和应用了处理一些工程问题的基本方法,在各位 老师及各位同学的帮助与支持下,顺利的完成了 本次机械创新设计,并完成报告的编制。 最后向所有关心和帮助过我的人表示真心的感谢 。
苏州大学研制的爬墙机器人
清洗巨人 擦 窗 机 器 人
墙面清洗机器人
研究框架(1)
研究的展开思路 和论文结构 右边是一个例子
相关概念(1)
爬墙清扫机器人的制作灵感来自于飞机的机翼,既然飞机 可以利用伯努利原理从而使飞机很重的重量平衡在空中, 那么,如果把这个力作用在小车上面,使小车收到足够的 压力,然后利用小车轮胎上面的摩擦力,使小车平衡在竖 直的墙面上,然后进一步进行转向和清扫的动作。 基于这一原理,我们设计了这一款清洁机器人,也就是清 洁小车。这个小车分为以下几部分。
解析履带式移动机器人底盘机械缮构设计
情 况 下 ,可 以 通 过 增 加 电机 扭 矩 的 方 式 .增 大 传 递 到 齿 轮 上 的 力 。
4 结 语
综 上 可 知 ,履 带 式 移 动 机 器 人 具 备 良好 的 承 载 能 力 .同时
3.1 电 机
现 阶 段 ,移 动 机 器人 的 驱 动 方 式 可 以分 为 液压 驱 动 、气动 驱 动 和 电机 驱 动 三种 ,而在 对 电机 进 行 选 择 时 ,需 要 对 相 应 的 参 数 进 行 核 算 。 在 平 地 运 动 时 , 电 机 的 最 大 负 载 力 矩 达 到
(1)坦 克 履 带 式 机 构 ,在 这 种 机 构 中 ,前 导 轮 中心 线 与 水 平 面 的 高 度 被认 为 是 能 够 翻 越 的 障 碍 的 最 大 高度 . 因 此 需要 设 置 两 套 电 机 驱 动 。其 结 构 相 对 简单 .但 是 如 果 想 要 跨 越 更 高 的 障碍 ,就 需要 增 加 机 器 人 的 整 体 高度 .无 法 运 用 于一 些 空 间
(1)主行 走 带 齿轮 数 ; (2)主行 走 带 齿轮 啮 合 齿 数 ; (3)主行 走 带 带速 ; (4)轴 上 承担 轴 与从 动 轴是 履 带 式 机 器 人 底 盘 机 械 结 构 中最 为关 键 的 部 分 ,需要 对 其 可 靠性 进行 分析 。应 该 对 主动 轴 的危 险截 面 进 行 检 验 ,计 算 其 受 力 情 况 ,然 后 结合 计 算 结 果 ,对 轴 承 的 直 径 和材 料 进 行 明确
3.5 齿 轮
相 对狭 小 的 区域 ,如 管道 等 。
对 于 箱体 内的 齿轮 ,可 以选 择 同种 规 格 和 类 型的 产 品 .同
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
履带驱动机构
履带驱动机构其动力部分 采用电机,通过齿轮副降 速后带动低速轴的转动, 轴与履带驱动机构通过导 杆滑块机构连接,从而使 履带驱动机构各自绕前后 轴的中心线转动,实现机 器人不同角度的爬坡和越 障能力。
机 器 人 跨 越 台 阶 ︓
机 器 人 跨 越 沟 槽 ︓
(a) (c)
(b)
结论
履带机器人的车体尺寸如下图:
690 80 85
50
50
400
624
484
80 400
85 550 1205
2.履带机器人的运作原理
减速传动机构电动机通过 减速器的降速,以实现增大 转矩,实现调速,减速器是 行星轮减速器,电动机安装 在减速器旁,通过直齿轮改 变轴的方向,输出后带机器人的结构设计 2.履带机器人的运作原理 3.结论
1.履带机器人的结构设计
1
2
3 4
5 6 7 8
9
1.后摆臂及履带 2.齿轮 3.永磁式直流电 机 4. 减速器 5. 蓄电池 6.微控制器 及组件 7.步进电机 8. 主履带 9.前 摆臂及履带
履 带 机 器 人 主 要 性 能 设 计 参 数 如 表 格 ︓
淘麦刷 /
麦乐刷
/
w911211
江西农业大学学士学位论文 履带式机器人结构设计
设 专 计 : 业 : 农业机械化及其制动化
指导老师 :
履带机器人的基本介绍
从20世纪60年代到70年代,迅速普及并实用 化的工业机器人给人的印象只是自动机械手。广泛 开展机器人移动功能的研究和开发是进入20世纪 80年代以后的事。现在作为移动机器人而开发试 制的移动机械种类已远远超过了机械手。特别是履 带式机器人,它不仅是生物体中没见过的移动形态, 而且能够在复杂的底面行进。 • 履带式机器人因采用履带传动方式而得名。履带 传动方式又叫循环传动方式,其最大特征是将圆状 的循环轨道履带卷绕在若干车轮上,使车轮不与地 面直接接触,利用履带缓冲地面而带来的冲击,使 机器人能够在各种路面条件下行进。
• 本次设计过程牵涉到所学知识的方方面面,通过自己 的设计思路, 一方面对以前所学的知识进行了温故, 其次也为日后从事工程实践工作 奠定了一定的基础。 • 设计中,我对履带机器人的工作原理、基本结构、性 能要求进行了比较 详细的分析,针对履带机器人中采 用的履带、减速器、电动机等也进行了必要的阐析。而 一个设计的好坏与否,在很大程度上取决于这个设计方 案选取是否得当、相关参数的计算是否准确等等,诸如 这些在本次的设计过程中都得到了具体的体现。另外, 为确保设计出的履带机器人能达到越障过坑等功能,我 们势必还要对履带机器人的相关部件进行一些必要的校 核,以最终确定此设计是否可以完成这些功能。 • 通过对履带机器人的相关性能要求的验算,得出设计 的结果基本上能够符合设计要求这一结果。
行星轮减速器
后轴驱动机构
后轴驱动机构驱动后轴位于传动系的末端。其基本功用 是增扭、降速和改变转矩的传递方向,即增大由传动轴 或直接从变速器传来的转矩,并将转矩合理的分配给左 右驱动车轮。
转向机构机器人 在行驶过程中, 经常需要改变行 驶方向,本机构 是通过两个电机 的差速比来实现 的。
双电机差速转向机构