斗轮堆取料机行走机构设计与安装
斗轮堆取料机安装方法
斗轮堆取料机安装方法斗轮堆取料机是一种广泛应用于工业生产领域的自动化设备,主要用于实现对物料的堆放和取料操作。
本文将详细介绍斗轮堆取料机的安装方法,以帮助读者正确安装、调试和使用该设备。
1. 前期准备工作在安装斗轮堆取料机之前,需要进行一些前期准备工作,确保安装过程的顺利进行。
1.1 设备检查在安装过程中,首先需要对斗轮堆取料机进行检查,确保设备没有受损或缺少任何零部件。
检查内容包括但不限于:•斗轮堆取料机的外观是否完好;•光电开关、传感器等控制和检测装置是否齐全;•电气系统是否正常;•传动装置是否灵活可靠。
1.2 安装环境准备斗轮堆取料机需要安装在相应的环境中,因此需要提前做好安装环境的准备工作。
具体包括:•确保安装地基平整稳固,能够承受设备的重量和振动;•预留适当的安装空间,确保设备的正常运转;•提供足够的电源和供气装置;•配备所需的安全设施,如防护罩、安全门等。
2. 安装步骤2.1 安装设备底座斗轮堆取料机的底座需要固定在安装基础上,确保设备的稳定性。
具体步骤如下:1.使用水平仪或测量工具检查基础平面是否水平。
2.将斗轮堆取料机底座放置在基础上,并调整底座的水平度,使其与基础平面保持垂直。
3.使用螺栓将底座固定在基础上,确保底座稳固可靠。
2.2 连接电气系统斗轮堆取料机的电气系统需要与现场电源系统连接,以确保设备能够正常运行。
具体步骤如下:1.根据设备的电气图纸,连接主电源线、控制线和信号线。
2.注意检查电气线路的接线是否正确,避免短路、接反等问题。
2.3 连接传动装置斗轮堆取料机的传动装置主要包括电机、减速器等部件,需要与斗轮进行正确连接。
具体步骤如下:1.将电机安装在斗轮堆取料机的相应位置上,并固定好。
2.根据电气图纸,连接电机与减速器之间的联轴器。
3.调整传动装置的位置和角度,使其与斗轮正确定位并密合。
2.4 安装控制系统斗轮堆取料机的控制系统是保证设备正常运行的关键,需要将其安装好并进行调试。
斗轮式堆取料机规范

斗轮式堆取料机规范斗轮式堆取料机是一种常用的物料取料调度或自动搬运设备,它的规范化安装与使用对设备的运行性能具有直接的影响。
因此,斗轮式堆取料机的规范安装及使用对其正常运行有着重要的意义。
一、斗轮式堆取料机安装规范1、安装路线规划在安装斗轮式堆取料机之前,应根据生产现场实际情况,合理制定设备安装路线,工作面积的规划位置。
斗轮式堆取料机的安装,要求安装深度与斗轮式堆取料机的实际情况相符,以保证设备的正常运行;2、底座安装斗轮式堆取料机的底座主要是由混凝土制作而成,底座的安装要求质量达到一定的标准,特别是混凝土的硬度,要求符合斗轮式堆取料机的各项安装要求;3、斗轮式堆取料机安装斗轮式堆取料机安装要求操作者熟练掌握安装设备的各项技术要求,对设备的位置、尺寸、质量进行严格检查确认,以保证设备的正常安装;4、气源系统安装机床为斗轮式堆取料机提供气源,气源系统安装要求管路质量达到一定的标准,接头要严格按照要求接好,以确保斗轮式堆取料机的正常使用;二、斗轮式堆取料机使用规范1、负责人斗轮式堆取料机的安装和操作必须由专业的负责人负责,负责人要熟悉斗轮式堆取料机的操作规程;2、斗轮式堆取料机的安全操作使用斗轮式堆取料机之前,必须熟知其安全操作程序,诸如调度或搬运物料时,应保持安全距离,防止发生意外;3、频繁观察使用斗轮式堆取料机时,要频繁观察其调度或搬运物料的情况,确保斗轮式堆取料机的正常运行;4、操作者操作斗轮式堆取料机的人员身体状况要满足一定的要求,且必须接受专业的培训,以确保操作者熟练掌握斗轮式堆取料机的各项操作要求;三、其他要求1、斗轮式堆取料机的安全设施斗轮式堆取料机中应设置有适当的安全设施,可以有效的防止意外事件的发生,保障设备及人员的安全;2、定期维护斗轮式堆取料机的安装及使用要定期维护,以确保其长期正常运行,保证设备的使用寿命;结论斗轮式堆取料机的安装及使用对其正常运行有着重要的意义。
斗轮式堆取料机的安装要求安装深度与斗轮式堆取料机的实际情况相符,使用斗轮式堆取料机的人员身体状况要满足一定的要求,必须接受专业的培训,定期维护,以确保斗轮式堆取料机的正常运行。
斗轮堆取料机安装说明书

斗轮堆取料机安装说明书二零一八年四月DQL 300/1200.35(D696P)臂式斗轮堆取料机安装应按制造厂的图纸和技术文件进行,并应符合本大纲和相关标准的规定要求 (该机电气控制系统另见臂式斗轮堆取料机电气说明书。
1.主要技术参数 Main technical parameter1. 1斗轮机构 (单向运行) bucket wheel unit (single side operation)斗轮转速 rotation speed bucket wheel: 7.5 r/min斗数 number of bucket: 8个驱动功率 driving power: 37Kw1.2悬臂胶带机(双向运行重锤拉紧) Cantilever belt conveyor(double sides operation, gravity tensioning)驱动装置 drive unit:75Kw (电动机+偶合器+制动器+减速机)(motor+coupling+brake+gear reducer)带宽 belt width:B=1400 mm带速 belt speed: V=2.8 m/s1.3 俯仰机构 luffing mechanism型式:整体平衡液压俯仰 type: incorporate balance hydraulic luffing type俯仰角度:满足堆高要求约–12.91°+9.33°luffing angle: meet the requirements of material height. Appr. -12.91°+9.33°仰俯速度:(斗轮中心处)约5m/minluffing speeed: (center of the bucket wheel) appr. 5m/min油缸型式:双作用缸 oil cylinder type: double functions cylinder1.4 回转机构 slewing mechanism回转机构型式:三排滚柱式回转支承,外齿传动type of slewing mechanism: three lines roller slewing support, outer teeth driving回转角度slewing angle:±110°回转半径:(从回转中心到斗轮中心)35mslewing radium: (from slewing center to bucket wheel center)驱动方式:电动机+安全联轴器+制动器+减速机+开式齿轮传动Driving pattern: motor+safety shaft coupling+brake+gear reducer+open gear transmission驱动功率driving power:15 Kw1.5 行走机构carriage traveling mechanism行走速度:工作~6 m/min,调车~30m/mintraveling speed: working ~6m/min, shunting ~30m/min驱动方式: FLENDER“三合一”减速机(8驱动变频调速电机)driving method: FLENDER triad gear reducer (8 driving, variable frequency speed adjustable motor)驱动功率driving power: 8X5.5kw1.6 尾车tripper尾车型式:半趴式折返尾车 type of tripper: semi-grovel to and fro tripper 尾车俯仰方式:双油缸同步工作Luffting pattern of tripper: double cylinder work synchronization尾车最大倾角max. Inclined angle: 14°带宽belt width:1400mm1.7 中心落料斗系统center material dropping hopper unit带电动推杆的挡料板装置。
桥式双斗轮取料机安装施工方案

桥式双斗轮取料机安装施工方案一、前言桥式双斗轮取料机是一种用于料场或码头等场所的物料取料设备,其安装施工工作至关重要。
本方案旨在详细介绍桥式双斗轮取料机的安装施工方案,以确保安装过程顺利、安全。
二、安装前准备1.确认安装位置:根据设计图纸确定桥式双斗轮取料机的安装位置。
2.配合准备:提前与其他相关工种协调,确保安装过程顺利进行。
3.安装人员培训:安排安装人员进行相关培训,熟悉安装流程和安全操作规程。
三、安装步骤1. 基础施工•根据设计要求打好桥式双斗轮取料机的基础,确保基础牢固。
•安装定位螺栓,做好基础与设备的连接准备。
2. 主体设备安装•将桥式双斗轮取料机的主体设备吊装到基础上,进行初步安装定位。
•根据设备安装图纸,连接设备的螺栓和连接件。
3. 起升机构安装•安装起升机构,确保起升机构的安装牢固可靠。
•调试起升机构,确认起升操作正常。
4. 电气连接•进行电气线路布线和连接,确保设备的电气系统正常运行。
•联调电气系统和机械系统,保证设备各部分协调配合。
四、安装验收1.安装完成后,进行设备的全面检查,确认各部分连接是否牢固、电气系统是否正常。
2.进行设备的空载和满载试运行,检查设备运行是否平稳、各部分操作是否灵活。
五、安全注意事项1.严格遵守安全操作规程,佩戴好安全防护装备。
2.在操作过程中要严格遵守操作规程,杜绝事故发生。
3.注意设备的维护保养,确保设备长期运行不出现故障。
结语桥式双斗轮取料机作为重要的物料取料设备,其安装过程需要高度重视。
通过本安装施工方案的执行,可以确保桥式双斗轮取料机的安装顺利、安全,为设备的后续使用提供保障。
斗轮堆取料机安装方法
斗轮堆取料机安装方法斗轮堆取料机安装方法(1)安装程序:准备工作→台车检查吊装→门座架组合吊装→下座圈安装→门座下部与上座圈组合→门座圈吊装→门座上部吊装→前臂架安装→平衡架安装→斗轮安装→变幅机构安装→尾车安装→油管路安装→附件安装→检查验收(2)安装方法:1)台车安装:台车组吊装就位要特别注意其方向,就位于标准轨道上,按图纸要求调整间距,误差在允许范围内。
2)门座架组合安装:门座架组合可采用倒置组合,先将两个分体连接,之后将门座架下四个支腿连接。
成整体后,吊装与台车连接,进行找正,焊接。
3)回转大轴及上下座圈安装:将下座圈吊于门座架上,将两者焊接牢固,下座圈焊后吊装大轴承,吊装上座圈至回转大轴承上。
4)门柱安装:门柱上下部预组合合格后与上座圈组合。
门柱就位前先装配重,后吊装门柱上部,之后进行回转平台,司机室、门柱各层平台、梯子安装。
5)前臂安装:在地面上进行组合,将托辊架、托辊滚筒装在前臂上,前臂顺轨道方向。
6)平衡架安装:起吊平衡架要保持平行,将平衡架中部的轴承孔与门柱头部销轴中心找正穿上销轴,然后将轴承与平衡架焊牢。
7)斗轮安装:先将料斗安装于轮体上,将悬臂梁支撑到安装斗轮高度连接,接着进行档料板及斗轮驱动装置的安装。
8)变幅机构安装:将变幅机构的卷扬机和滑轮组按图装好,穿好钢丝绳,进行活配重安装,以保持堆取料机工作稳定性。
9)传动轴安装:将传动轴吊入门柱传动孔中,最后安装档环,核实齿轮啮合情况,轴垂直度,无误后焊档圈之垫圈。
10)尾车安装:将尾车行走轮装于支腿上,找正固定。
将尾车架装于支腿上找正固定。
装托辊架、托辊和改向滚筒,装好与门架连接。
11)液压系统安装:液压油管道应进行化学清洗,安装时液压系统接口位置,进出口方向正确。
液压系统配管之弯头弯曲半径应是管径的三倍,椭圆度不大于管径的10%。
感谢您的阅读!。
斗轮堆取料机安装方案共11页文档
斗轮堆取料机安装方案一、主要构件斗轮堆取料机(约320吨)主要由行走机构(约15.3吨)、门座(约22.6吨)、转台(约12.2吨)、上部金属结构(约55吨)、斗轮总成(约12.5吨)、配重系统(约65吨)、尾车(约65吨)、液压机构、回转机构(约14.9吨)、变幅机构、电气控制系统、喷水抑尘系统及其它附属部件组成。
1.金属构架由上部金属结构、门座、尾车、转台等组成。
上部金属结构由平衡臂、拉杆、后臂、前臂等组成;转台由箱型钢板焊接而成,与上部金属结构采用铰接;门座为四支腿门架结构,支腿分别与行走机构的平衡梁连接;尾车为主付尾车折返通过式,主尾车为固定式、付尾车是可变位的。
2.进料皮带机位于后部,该皮带机的胶带是煤场主皮带机胶带的一部分,它依靠尾车上的两组液压缸的作用完成俯仰动作,实现斗轮堆取料机的堆料和取料功能。
3.悬臂皮带机该机装在前臂上,是堆料作业和取料作业装置的组成部分,正转时将进料皮带机送来的煤通过皮带机头部堆往煤场,当斗轮从煤场取料时,悬臂皮带机反转,将斗轮取到的煤经堆取料机中心的落煤筒送往煤场的皮带机。
4.斗轮总成斗轮边缘焊有耐磨的斗齿,用以破碎冬季煤堆表面不大于100毫米的冰冻层取煤。
斗轮由机械驱动系统实现。
斗轮位于前臂一侧,借助溜料板将斗轮旋转时挖取的煤连续地供给悬臂皮带机,通过煤场主皮带机送往输煤系统。
5.俯仰机构总成由双作业油缸、三为四通电液换向阀、溢流阀和齿轮油蹦极节流阀所组成的开式油系统。
斗轮堆取料机的上部金属结构以铰座轴心为回转中心上下俯仰;取料高度为轨道平面以上10米,轨道平面以下2米;堆料高度为轨道平面以上10米。
上部金属结构的动作由高压油经三位四通电液换向阀推动双作用的油缸进行俯仰控制。
6.回转机构由行星减速器、制动器、极限转矩联轴器、防超转装置、回转角度发生器、大轴承、润滑系统等组成。
由行星减速器末端小齿轮与大齿轴承外圈齿轮相啮合,带动转台及整个上部构件进行回转运动。
斗轮堆取料机行走机构组成及安装调试
斗轮堆取料机行走机构组成及 安装调试
曲志 江
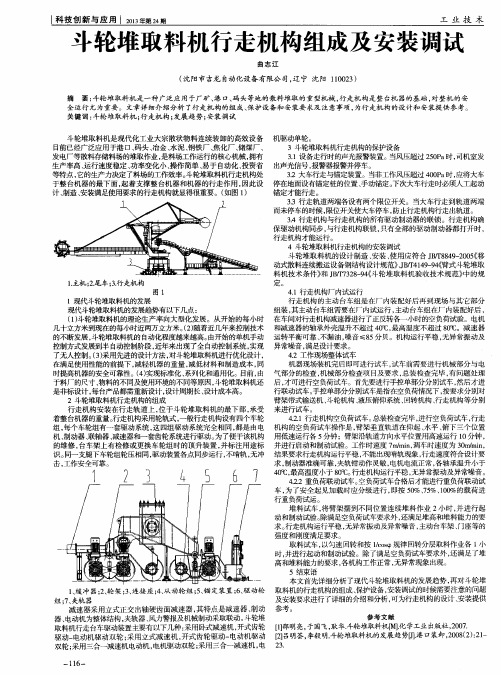
( 沈 阳市吉龙 自动化设备有 限公 司, 辽宁 沈 阳 l 1 0 0 2 3 ) 摘 要: 斗轮堆取料机是一种广泛应用于厂矿、 港 口、 码 头等地的散料堆取的重型机械 , 行走机构是整 台机 器的基础 , 对整机的安 全运行 尤为重要 。文章详细介绍分析 了行走机构的组成、 保护设备和安装要求及 注意事项 , 为行走机构的设计和安装提供参考。 关键词: 斗轮 堆取 料 机 ; 行 走机 构 ; 发展 趋 势 ; 安 装调 试 斗轮堆取料机是现代化工业大宗散状物料连续装卸的高效设备 目前 已经广 泛应 用 于港 口 、 码头 、 冶金 、 水泥、 钢铁 厂 、 焦化 厂 、 储煤厂、 发电厂等散料存储料场的堆取作业, 是料场工作运行的核心机械, 拥有 生产率高、 运行速度稳定 、 功率变化小 、 操作简单 、 易于自动化、 投资省 等特点 , 它的生产力决定了料场的工作效率。 斗轮堆取料机行走机构处 于整 台机 器 的最 下 面 , 起 着 支撑 整 台机 器和 机器 的行 走 作用 , 因此设 计、 制造 、 安装满足使用要求的行走机构就显得很重要。( 如图 1 )
机 驱动单 轮 。 3斗轮堆取 料机行 走机构 的保护设 备 3 . 1设备 走行时 的声光 报警装置 。当风压超过 2 5 0 P a 时, 司机 室发 出声光信 号 , 报警器 报警并 停车 。 3 . 2大车行走与锚定装置。当非工作风压超过 4 0 0 P a 时, 应将大车 停 在地 面设 有锚 定桩 的位置 、 手动 锚定 。 下 次大车 行走 时必须人 工起 动 锚 定才 能行走 。 3 . 3行 走轨 道两端 各设 有两个 限位 开关 。当大 车行 走到 轨道 两端 而未停车的时候 , 限位开关使大车停车 , 防止行走机构行走出轨道 。 3 . 4 行走机 构与 行走机 构 的所有驱 动制 动器 的联锁 。行 走机 构 确 保驱 动机构 同步 , 与行走 机构 联锁 , 只有 全部 的驱 动制 动器 都打 开 时 , 行走机 构才 能运 行 。 4斗轮 堆取料 机行走机 构 的安装 调试 斗轮堆取料机的设计制造 、 安装 、 使用应符合 J B / r 8 8 4 9 — 2 0 0 5 ( ( 移 动式散 料连续 搬运 设备 钢结构 设计 规范 》 、 J B / T 4 1 4 9 — 9 4 《 臂式 斗轮堆 取 料机技术条件》 和J B / I 7 3 2 8 — 9 4 《 斗轮堆取料机验收技术规范》 中的规 1 . 主机 ; 2 . 尾车; 3 . 行走机 构 定。 图 1 4 . 1行走机 构厂 内试 运行 1现代斗 轮堆取 料机 的发展 行 走机 构 的主 动 台车组 是 在厂 内装配 好后 再 到现 场与 其 它部 分 现代斗 轮堆取料 机 的发 展趋势 有 以下 几点 : 组装 , 其 主动 台车组需 要在 厂 内试 运行 , 主动 台车组 在厂 内装 配好 后 , ( 1 ) 斗轮堆 取料机 的理 论生产 率 向大 型化 发展 。从 开始 的每小 时 在车 间对行 走机构 减速器进 行 了正 反转各 一小 时的空负荷 试验 。电机 0  ̄ C, 最 高温度 不超 过 8 0 ℃。减 速器 几 十立方 米到现 在的每小 时近两 万立方 米 。 ( 2 ) 随着近几 年来控 制技术 和减 速器 的轴 承外壳 温升 不超过 4 的不断发 展 , 斗轮堆 取料机 的 自 动 化程度 越来越 高。 由开 始的单 机手动 运转 平衡 可靠 、 不漏 油 , 噪音 ≤8 5 分 贝 。机构运行 平 稳 , 无异 常振 动及 控 制方式 发展 到半 自动控 制阶段 , 近年来 出现 了全 自动 控制系统 , 实现 异 常噪音 , 满 足设计 要求 。 了无人控制。 ( 3 ) 采用先进的设计方法 , 对斗轮堆取料机进行优化设计 , 4 . 2工作现场整体试车 在 满足 使用性 能 的前提下 , 减 轻机 器的重 量 , 减 低 材料 和制 造成 本 , 同 机器 现场装 机完后 即可 进行试 车 , 试 车前需 要进 行 机械 部分 与 电 时提高机器的安全可靠性。 ( 4 ) 实现标准化 、 系列化和通用化。目前 , 由 气 部分 的检查 , 机械 部分检 查项 目及 要求 , 总装 检查 完毕 , 有 问题 处理 于料厂 的尺寸 、 物 料的不 同及使用 环境 的不 同等 原 因 , 斗 轮堆取 料机还 后 , 才可进行 空负荷 试车 。首先要进 行手控 单部分分 别试 车 , 然后 才进 行 联动试 车 。 手控 单部分 分别试 车是指 在空负行 隋况下 , 按 要求分 别对 是非标设计, 每台产品都需重新谢 十 , 设计周期长 、 设计成本高。 2斗轮堆 取料机 行走机构 的组成 臂 架带式 输送机 、 斗轮机构 、 液压俯 仰系统 、 回转机构 、 行走 机构等 分别 行走 机 构安 装 在行 走轨 道上 , 位 于 斗轮 堆取 料 机 的最下 部 , 承受 来 进行试 车 。 着整 台机器 的重量 。 行 走机构 采用轮 轨式 , 一般行 走机构 设有 四个车 轮 4 . 2 . 1行走 机构空 负荷试 车。 总装 检查完 毕 , 进行 空负荷试 车 , 行走 组, 每个车轮组有一套驱动系统, 这 四组驱动系统完全相同, 都是由电 机构 的空负 荷试 车操作 是 , 臂架 垂 直轨道 在 仰起 、 水平 、 俯下 三个 位置 分钟 ;臂 架沿轨 道方 向水平位 置用高 速运行 1 0 分钟 , 机、 制动器、 联轴器 、 减速器和一套齿轮系统进行驱动。 为了便于该机构 用低速运 行各 5 的 维修 , 台 车架 上有 检修 或 更换 车 轮组 时 的顶 升装 置 , 并 标 注用 途 标 并进行启 动 和制 动试验 。工作 时速度 7 m / a r i n , 调 车时 速度 为 3 O e r / a r i n , 不 能 出现 啃轨现 象 , 行走速 度符合设 计要 识。 同一 支腿下 车轮组 轮压相 同 , 驱动装置 各点 同步运行 , 不啃轨 , 无 冲 结果要求 行走 机构运行 平稳 , 求, 制动器 准确 可靠 , 夹轨钳 动作灵 敏 , 电机 电流正 常 , 各轴 承温 升小 于 击, 工作 安全可 靠 。 4 0 q C , 最高 温度小 于 8 0 ℃。 行 走机构 运行平 稳 , 无异 常振动及 异常 噪音 。 4 . 2 . 2重负荷联动试车。 空负荷试车合格后才能进行重负荷联动试 车, 为 了安全 起见 加 载 时应 分级 进行 , 即按 5 0 %、 7 5 %、 1 0 0 %的载 荷 进 行重 负荷试 运。 堆 料试 车 , 将臂 架 摆到 不 同位 置连 续堆 料 作业 2 小时 , 并进 行 起 动和制动试验。 除满足空负荷试车要求外 , 还满足堆高和堆料能力的要 求。 行走 机构运行 平稳 , 无 异常振 动及异 常噪音 , 主动 台车架 、 门座 等的 强度和刚度满足要求 。 取料试 车 , 以匀速 回转和 按 1 / e o s q  ̄ 规律 回转 分层 取料作 业各 1 小 时, 并进行起动和制动试验。除了满足空负荷试车要求外 , 还满足 了堆 高 和堆料 能力 的要求 , 各机 构工作 正常 , 无 异常现象 出现 。 5结 束语 本文首先详细分析了现代斗轮堆取料机 的发展趋势, 再对斗轮堆 保护设备 , 安装调试的时候需要注意的问题 1 、 缓冲器; 2 、 轮 架; 3 、 连接 座 ; 4 、 从动轮组; 5 、 锚 定装 置 ; 6 、 驱动 轮 取料机的行走机构的组成、 及安装要求进行 了详细的介绍和分析, 可为行走机构的设计 、 安装提供 组: 7 、 夹轨 器 减速器采用立式正交出轴硬齿面减速器 , 其特点是减速器 、 制动 参考 。 参 考文献 器、 电动机为整体结构 , 夹轨器 、 风力警报及机械制动采取联动。 斗轮堆 1 邴 明亮 , 于国飞 , 耿 华 斗 轮 堆取料机 . 化 学工业 出版社 , 2 0 0 7 . 取料 机行走 台车驱 动装置 主要有 以下几种 : 采用 卧式减速 机 , 开式齿 轮 『 2 ] 吕明荟 , 李毅 明斗 轮 堆取料 机的 发展趋 势叨. 港 口装 卸 , 2 O O 8 ( 2 ) : 2 1 — 驱 动一 电动机 驱动 双轮 ; 采 用立 式减 速 机 , 开式 齿轮 驱 动一 电 动机 驱动 『
斗轮堆取料机安装作业指导书
斗轮堆取料机安装作业指导书一、工程概述:xxx 电厂一期工程4×600MW 机组输煤系统配备 2 台斗轮堆取料机,型号为DQ1500/1500.25 ,一台采用双尾车(主、辅尾车)型式,通过式运行;另一台采用折返式单尾车。
斗轮堆取料机布置在储煤场#6 皮带机两侧的轨道上,用于煤场燃煤堆取作业,其行走轨道长度270m ,堆料出力1500t/h ,取料出力1500t/h ,悬臂长度25m 。
为防止灰尘,斗轮机装有喷水系统,通过喷雾灭尘,可以有效的除尘、抑尘。
本设备由长春发电设备有限公司制造。
二、斗轮机主要技术参数:1、生产率:堆料1500t/h ;取料1500t/h2、堆取料高度:轨上8.5m ;轨下 1.5m3、取料机构:(1)斗轮形式:无格式(2)斗轮直径:6.3m (3)斗容:0.50m 3(4)斗数:9(5)斗速: 6.51r/min (6)电动机功率:90kw4、俯仰机构:(1)俯仰范围:上仰+8.58 °,下俯-14.49 °(2)俯仰速度(斗轮中心):上仰3.4m/min ,下俯5m/min (3)液压系统工作压力:16Mpa5、回转机构:(1)回转半径:25m (2)回转速度:0~0.12r/min(3)回转角度:堆± 110 °,取±110 °(4)电动机功率:11 kw6、行走机构:(1)工作行走速度:5m/min (2)非工作行走速度:15m/min(3)车轮直径:Φ630mm (4)最大轮压:≤ 250kN (5)电动机功率:4×7.5kw7、悬臂皮带机:(1)带宽:1400mm (2)带速:2.5m/s (3)电动机功率:75kw8、尾车:(1)贯通式尾车和折返式尾车各一台(3)带宽:1400mm(4)带速:2.5m/s9、供电电压:6000VAC10 、全机总装备功率:(1)贯通式:350 kw (2)折返式:270kw11 、整机总重:(1)贯通式:300 吨(2)折返式:270 吨三、施工依据:1、施工图50-F111S-M0301 ,《斗轮堆取料机及 6 号(钢芯)带式输送机布置图》。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
斗轮堆取料机行走机构设计与安装【摘要】斗轮堆取料机是一种广泛应用于电厂、钢厂、港口、码头等地的散料堆取的重型机械,行走机构在处于整台机器的最下面,对整机的安全运行尤为重要。
本文详细介绍分析了行走机构的组成、保护设备和安装要求及注意事项,为行走机构的设计和安装提供参考和指导。
【关键词】斗轮堆取料机行走机构发展趋势安装调试
1 引言1
斗轮堆取料机是现代化工业大宗散状物料连续装卸的高效设备目前已经广泛应用于港口、码头、冶金、水泥、钢铁厂、焦化厂、储煤厂、发电厂等散料存储料场的堆取作业。
随着社会发展,料场的吞吐量越来越高,斗轮堆取料机是料场工作运行的核心机械它的生产力决定了料场的工作效率,因此有必要提高斗轮堆取料机工作效率。
由于斗轮堆取料机是连续作业系统,其生产率高、能耗低、运行速度稳定、功率变化小操作简单、易于自动化、投资省等特点在很多场合取代了传统适用的装载机。
斗轮堆取料机行走机构处于整台机器的最下面,起着支撑整台机器和机器的行走作用,因此设计、制造、安装满足使用要求的行走机构就显得很重要。
(如图1)本文对斗轮堆取料机的发展趋势进行了详细的分析,介绍了行走机构的组成、行走机构的保护设备和行走机构的安装调试要求。
2 现代斗轮堆取料机的发展趋势
现代斗轮堆取料机的发展趋势可归结为以下几点:
(1)斗轮堆取料机的理论生产率向大型化发展。
它的理论生产率是衡量斗轮堆取料机的规模的一个指标,从初期的每小时几十立方米到现在的每小时进两万平方米。
港口使用的斗轮堆取料机一般都是大机型,其生产率越高,港口的使用率也就越高。
目前,国内最大的斗轮堆取料是由大连重工研发的取料10000t/h,堆料12000t/h的机型,近来来华泰重工、三一重工、湖南长重机器股份有限公司也在进行大吨位斗轮堆取料机的研发与生产。
(2)随着近年来控制技术的不断发展,斗轮堆取料机的自动化程度越来越高。
斗轮堆取料机的控制系统由初期的单机手动控制方式发展到半自动控制阶段,近来来出现了全自动控制系统,实现了无人控制,通过监控系统监视斗轮堆取料机的工作情况。
在国外发达国家的港口的斗轮机基本是全自动化控制,国内部分厂家的斗轮机也实现了全自动控制。
目前plc发展迅速,国内近些年开始研究斗轮堆取料机的无人自动控制,在国外大部分斗轮堆取料机已经实现了无人自动控制。
设备一旦出现故障,系统平台就会提示相关信息,技术人员就能够在最短的时间对数据进行分析并作出判断,通过远程协助及时排除故障。
(3)采用先进的设计方法,对斗轮堆取料机进行优化设计,在满足使用性能的前提下,减轻机器的重量,减低材料和制造成本,同时提高机器的安全可靠性。
目前斗轮堆取料机的设计还是以经验设计为主,采用类比的方法,凭借经验给定机构的尺寸,设备的可靠程度得不到保证,同时整机的重量很重。
(4)实现标准化、系列化和通用化。
目前,由于料厂的尺寸、物料的不同及使用环境的不同等原因,斗轮堆取料机还是非标设计,每台产品都需重新设计,设计周期长、设计成本高。
3 斗轮堆取料机行走机构的组成
斗轮堆取料机行走机构由多组结构完全相同的行走台车与门座组成。
行走台车主要由主动台车组、从动台车组、平衡梁、锚定装置、行走检测装置、夹轨器等组成,见图2。
行走机构安装在行走轨道上,位于斗轮堆取料机的最下部,承受着整台机器的重量。
行走机构采用轮轨式,一般行走机构设有四个车轮组,每个车轮组有一套驱动系统,这四组驱动系统完全相同,都是由电机、制动器、联轴器、减速器和一套齿轮系统进行驱动。
为了便于该机构的维修,台车架上有检修或更换车轮组时的顶升装置,并标注用途标识。
同一支腿下车轮组轮压相同,驱动装置各点同步运行,不啃轨,无冲击,工作安全可靠。
减速器采用立式正交出轴硬齿面减速器,其特点是减速器、制动器、电动机为整体结构,夹轨器、风力警报及机械制动采取联动。
斗轮堆取料机行走台车驱动装置主要有以下几种:采用卧式减速机,开式齿轮驱动-电动机驱动双轮;采用立式减速机,开式齿轮驱动-电动机驱动双轮;采用三合一减速机电动机,电机驱动双轮;采用三合一减速机,电机驱动单轮。
4 斗轮堆取料机行走机构的保护设备
为了保证机器的使用性能与安全生产要求,斗轮堆取料机的行
走机构有以下保护措施:
(1)设备走行时的声光报警装置。
当风压超过250pa时,司机室发出声光信号,报警器报警并停车。
(2)大车行走与锚定装置。
当非工作风压超过400pa时,应将大车停在地面设有锚定桩的位置、手动锚定。
下次大车走行时必须人工起动锚定才能行走。
(3)行走轨道两端各设有两个限位开关。
当大车行走到轨道两端而未停车的时候,限位开关使大车停车,防止行走机构行走出轨道。
(4)行走机构与行走机构的所有驱动制动器的联锁。
行走机构确保驱动机构同步,与行走机构联锁,只有全部的驱动制动器都打开时,行走机构才能运行。
5 斗轮堆取料机行走机构的安装调试
斗轮堆取料机的设计制造、安装、使用应符合jb/t8849-2005《移动式散料连续搬运设备钢结构设计规范》、jb/t4149-94《臂式斗轮堆取料机技术条件》和jb/t7328-94《斗轮堆取料机验收技术规范》中的规定。
按照jb/t7328-94《斗轮堆取料机验收技术规范》中的规定,斗轮堆取料机在整机安装后应在现场进行试车和技术考核验收,由安装部门进行空负荷试车,由建设单位、用户负责负荷试车和技术考核验收。
其考核的指标有,额定生产率偏差,堆料高度偏差,臂架回转半径偏差,臂架回转角度偏差,回转调速偏差,设备各发声源
产生声音的大小,机器的电气使用部分的要求,机器各部分的强度与刚度等。
在机器经过连续正常运转168个小时(168交车试验)后才可以正常交车。
5.1 行走机构厂内试运行
行走机构的主动台车组是在厂内装配好后再到现场与其它部分组装,其主动台车组需要在厂内试运行,主动台车组在厂内装配好后,在车间对行走机构减速器进行了正反转各一小时的空负荷试验。
按jb/t7328-94《斗轮堆取料机验收技术规范》要求,电机和减速器的轴承外壳温升不超过40℃,最高温度不超过80℃。
减速器运转平衡可靠、不漏油,噪音≤85分贝。
机构运行平稳,无异常振动及异常噪音,满足设计要求。
5.2 工作现场整体试车
机器现场装机完后即可进行试车,试车前需要进行机械部分与电气部分的检查,机械部分检查项目及要求见表1,总装检查完毕,有问题处理后,才可进行空负荷试车。
首先要进行手控单部分分别试车,然后才进行联动试车。
手控单部分分别试车是指在空负荷情况下,按要求分别对臂架带式输送机、斗轮机构、液压俯仰系统、回转机构、行走机构等分别来进行试车。
(如表1)
5.2.1 行走机构空负荷试车
总装检查完毕,进行空负荷试车,行走机构的空负荷试车操作是,臂架垂直轨道在仰起、水平、俯下三个位置用低速运行各5分钟;臂架沿轨道方向水平位置用高速运行10分钟,并进行启动和
制动试验。
结果要求行走机构运行平稳,不能出现啃轨现象,行走速度符合设计要求,制动器准确可靠,夹轨钳动作灵敏,电机电流正常,各轴承温升小于40℃,最高温度小于80℃。
行走机构运行平稳,无异常振动及异常噪音。
经测试,机构运行平稳,未出现啃轨现象,工作时速度7m/min,调车时速度为30m/min,行走速度满足设计要求。
制动器准确可靠,夹轨钳动作灵敏,满足设计要求。
5.2.2 重负荷联动试车
空负荷试车合格后才能进行重负荷联动试车,为了安全起见加载时应分级进行,即按50%、75%、100%的载荷进行重负荷试运。
堆料试车,将臂架摆到不同位置连续堆料作业2小时,并进行起动和制动试验。
除满足空负荷试车要求外,还满足堆高和堆料能力的要求。
行走机构运行平稳,无异常振动及异常噪音,主动台车架、门座等的强度和刚度满足要求。
取料试车,以匀速回转和按1/cosφ规律回转分层取料作业各1小时,并进行起动和制动试验。
除了满足空负荷试车要求外,还满足了堆高和堆料能力的要求,各机构工作正常,无异常现象出现。
由于168交车试验要求机器正常连续使用168个小时,试车中凡故停车的,待事故处理完毕后,重新开始试车,其试车时间必须重新计算,不得前后累加。
6 结语
本文首先详细分析了现代斗轮堆取料机的发展趋势,再对斗轮堆取料机的行走机构的组成、保护设备,安装调试的时候需要注意
的问题及安装要求进行了详细的介绍和分析,可为行走机构的设计、安装提供参考。
参考文献:
[1]邵明亮,于国飞,耿华.斗轮堆取料机[m].化学工业出版社,2007.
[2]吕明荟,李毅明.斗轮堆取料机的发展趋势[j].港口装卸,2008(2):21-23.
[3]蔡增蛟.电站斗轮堆取料机安装技术及工艺控制[j].电力建设,2008(9):175 -176.
[4]钱江涛.斗轮堆取料机主参数的选用[j].水利电力机械,2005(2):21-22.
[5]瞻伟钢,葛朋.堆取料机行走驱动机构的改进[j].起重运输机械,2006(1):15-16.。