液位计调试指导
超声波液位计调试基本参数设定
超声波液位计调试基本参数设定超声波液位计是一种常用的液位测量仪器,广泛应用于工业生产和环境监测中。
在使用超声波液位计进行液位测量之前,需要对其进行基本参数设定和调试,以确保其正常工作和准确测量。
本文将介绍超声波液位计调试的基本参数设定方法。
1. 波特率设置波特率是指串行通信中单位时间传输的数据位数。
超声波液位计通常采用串行通信方式与上位机或控制系统进行数据交换。
在调试时,需要根据实际情况设置超声波液位计的波特率,以确保与上位机或控制系统的通信正常进行。
2. 测量范围设定超声波液位计的测量范围是指其能够测量液位的最大距离。
在进行测量之前,需要根据实际情况设定超声波液位计的测量范围,以确保其能够准确测量液位。
测量范围的设定需要考虑液体的高度以及超声波液位计的测量能力。
3. 发射角度设定超声波液位计通过发射超声波信号并接收回波来测量液位。
发射角度是指超声波液位计发射超声波信号的范围。
在调试时,需要根据液体的容器形状和液位测量的要求,设定超声波液位计的发射角度,以确保其能够准确测量液位。
4. 测量间隔设定测量间隔是指超声波液位计进行连续测量的时间间隔。
在实际应用中,超声波液位计通常需要进行连续测量,以实时监测液位变化。
在调试时,需要根据实际要求设定超声波液位计的测量间隔,以确保其能够及时反映液位变化。
5. 温度补偿设定超声波液位计的工作受环境温度的影响,温度变化会对测量结果产生一定的影响。
为了提高测量的准确性,超声波液位计通常会进行温度补偿。
在调试时,需要根据实际情况设定超声波液位计的温度补偿参数,以确保其能够准确测量液位。
6. 报警设置超声波液位计通常具有报警功能,可以在液位超过或低于设定的阈值时进行报警。
在调试时,需要根据实际需求设定超声波液位计的报警参数,以确保其能够及时报警并采取相应的措施,保证液位的安全运行。
7. 防护等级设定超声波液位计在使用过程中需要考虑其防护等级,以保证其在恶劣环境中的正常工作。
导波雷达液位计调试步骤两版带举例MR
导波雷达液位计调试步骤两版带举例MR 导波雷达液位计是一种常用的液位测量仪器,可以应用于各种工况和液体介质。
调试导波雷达液位计需要进行准确的标定和参数设置,以确保其测量结果的准确性和稳定性。
下面分别是两版导波雷达液位计的调试步骤,以及一些实际应用中的例子。
第一版调试步骤:1.安装:将导波雷达液位计安装在液位容器上,根据实际要求选择合适的安装方式,如顶装、侧装或杠杆式安装。
确保安装牢固,并且传感器与液位容器无任何物理接触。
2.连接:连接导波雷达液位计与控制系统,确保正确连接电源和信号线,并检查线缆是否接地良好。
建议使用双绞线或屏蔽电缆以减少电磁干扰。
3.参数设置:根据液体介质特性和工况要求,设置导波雷达液位计的相关参数,包括介质类型、介质密度、容器形状等。
这些参数可以在液位计的用户手册中找到,或者通过厂家的技术支持获取。
4.标定:进行导波雷达液位计的零点和满量程标定,以确保测量结果的准确性。
首先将液位计置于空置状态,调整零点参数,使得显示值与实际液位值一致;然后将液位计置于满量程状态,调整满量程参数,使得显示值与实际液位值一致。
5.验证:使用标准测量工具,如液位计或尺子,进行液位的实际测量,并将测量结果与导波雷达液位计的显示值进行对比。
如果存在偏差,可以调整标定参数或重新进行标定。
导波雷达液位计安装在储罐的顶部,并连接到控制系统。
根据化工液体的特性,设置导波雷达液位计的参数,如介质类型为液态、介质密度为1.2 g/cm³、容器形状为圆柱形。
然后进行零点和满量程标定,确保导波雷达液位计的显示值与实际液位值一致。
最后,使用液位计或尺子进行实际液位的测量,并将测量结果与导波雷达液位计的显示值进行对比。
第二版调试步骤:1.安装:将导波雷达液位计安装在液位容器上,保证传感器的安装位置平稳且无需物理接触。
确保导波雷达液位计与液位容器之间没有障碍物,以免影响测量精度。
2.连接:连接导波雷达液位计与控制系统,确保正确连接电源和信号线,并检查线缆是否接地良好。
罗斯蒙特超声波液位计调试方法
一、概述罗斯蒙特超声波液位计是一种常用的工业液位测量仪器,其精确度和稳定性受到了广泛认可。
为了确保液位计的正常运行,及时发现故障并进行调试是非常重要的。
本文将介绍罗斯蒙特超声波液位计的调试方法,帮助工程师和操作人员更好地了解和掌握液位计的调试技术,提高工作效率和准确性。
二、罗斯蒙特超声波液位计调试方法1. 环境检查在进行液位计的调试工作之前,首先要对液位计安装位置的环境进行检查。
确保周围没有对超声波信号产生影响的障碍物和干扰源,如大型机械设备、高温设备等。
另外,还需要检查液体的性质和温度,因为不同的液体性质和温度对超声波的传播有一定影响。
2. 电气连接检查接下来要检查液位计的电气连接是否正确,包括电源输入、信号输出和接地线。
确保所有连接牢固可靠,无松动或短路现象,并且符合设计要求。
另外还需要检查液位计的电源是否正常,电源线路是否稳定,以及信号线路是否通畅。
3. 调试软件设置对于数字化的液位计,通常需要通过专门的调试软件来进行参数设置和校准。
在进行调试前,需要安装好相关的软件,并对软件进行设置和校准。
其中包括对液体类型、液体高度、超声波频率等参数进行设置,以确保液位计的测量精度和稳定性。
4. 超声波传感器设置超声波传感器是液位计的核心组件,其设置直接影响了液位计的测量精度。
在进行超声波传感器设置时,需要注意以下几点:要确保传感器安装位置的垂直度和水平度,以保证超声波的发射和接收方向正确;需要对超声波的发射频率和功率进行调节,以适应不同液体的测量要求;还需要对传感器的灵敏度进行调节,以确保其在不同液位条件下都能正常工作。
5. 远程监控和调试对于一些较大规模的工业系统,通常会配备远程监控和调试系统,以实现对液位计的远程监控和调试。
在进行远程监控和调试之前,需要确保网络连接稳定可靠,而且系统配置正确。
另外,还需要对远程监控和调试软件进行设置和校准,以确保其能够准确地反映液位计的工作状态,并且进行远程调试操作。
双色液位计调试说明
双色金属液位计调试说明
一、仪表控制面板说明
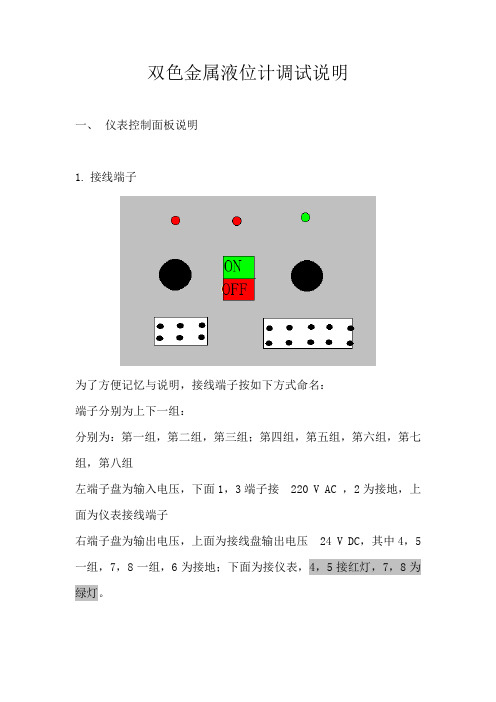
1.接线端子
为了方便记忆与说明,接线端子按如下方式命名:
端子分别为上下一组:
分别为:第一组,第二组,第三组;第四组,第五组,第六组,第七组,第八组
左端子盘为输入电压,下面1,3端子接 220 V AC ,2为接地,上面为仪表接线端子
右端子盘为输出电压,上面为接线盘输出电压 24 V DC,其中4,5一组,7,8一组,6为接地;下面为接仪表,4,5接红灯,7,8为绿灯。
2.光线调节
左面的调节旋钮为双色金属液位计红色亮度调节旋钮
右面的调节旋钮为双色金属液位计绿色亮度调节旋钮
3.电源开关
控制仪表电源供电的总开关
二、双色金属液位计调节
双色金属液位计光源下部分别有两个螺栓,首先拧松螺栓;然后调节光源两部螺杆,使得光源左右移动,站在液位计正前方,观察是否能够清晰的显示液位,其中水是绿色,气是红色。
重复多次,知道能够正确清晰显示液位为止。
三、工业摄像机调整
1、按照一定的接线方式接好线路
2、上下移动镜头,使得双色金属液位计的液位上下限正好铺满显示屏幕的上下限,此时拧紧螺栓,固定。
3、为以后维护方便,关闭摄像头图像控制器电源,以免工艺人员不小心按到面板按钮,制造不必要的麻烦!。
液位计调试说明指导书
液位料位计调试说明书杨帆整理目录雷达液位计................... 错误!未定义书签。
超声波液位计................. 错误!未定义书签。
雷达料位计................... 错误!未定义书签。
射频导纳液位计............... 错误!未定义书签。
型号:LR 250操作步骤(1)语言(2)介质(选择液体liquid)(3)反应速度(快中慢)Quick Start (4)单位(选择米)(快速开始设置)(5)操作模式(液位level)(6)低标定点(空罐液位)(7)高标定点(通常选择0)(8)确定说明:1、低标定点设置方法是先任意设置低标,测空罐液位,修改低标便可,比如:低标设置1米,确定后显示-2米,实际液位为3米。
再次修改低标为3米,完成量程设置。
2、默认语言为英语,介质为液体liquid,反应速度为快、单位为米、操作模式为液位level。
3、每次修改参数后到最终一步选择Yes 确定。
超声波液位计设置为代码,具体以下:P01操作模式:1液位(level)2空间(space)3距离(distance)P02界面属性:1水平(standard)2斜面(slope?)P03反应速度:1快(fast)2中(middle)3慢(slow)P04探头类型P05单位:m、cm 、mm、英尺(feed)、英寸(inch)P06安装位置到池底距离P07量程说明:1、注意设置量程,比如安装位置到池底为3米,池高2.8米,则P06为3米,P07为2.8米。
不可和雷达液位计混淆。
2、默认参数:操作模式:液位(level);界面属性:水平(standard);反应速度:快(fast);单位:m ;3、探头类型为出厂默认,不用修改。
雷达料位计设置步骤:开始设置(start)→快速开始设置(quick start)1、仓结构类型:钢仓(steel)、水泥仓(concrete);2、反应速度:快(fast)、中(middle)、慢(slow);3、单位(uint):m、cm、mm ;4、测量模式:距离(distance)、物位(level)、空间(space);5、低标定点:仓底到安装位置距离6、高标定点:默认为0;7、确定;注意事项:1、低标定点设置方法是先任意设置低标,测空仓物位,修改低标便可,比如:低标设置10米,确定后显示2米,实际液位为8米。
现场液位计校正方法
现场液位计校正方法
液位计的校正方法有多种,以下是其中一种常用的方法:
1. 确定参考零点:在开始校正之前,需要选择一个参考零点。
通常选择液位计的底部或管线的最低点作为参考零点。
2. 测量液位高度:使用液位计测量液位高度,并记录下测量值。
3. 比较测量值与实际值:将液位计的测量值与实际液位值进行比较,以确定液位计的误差。
4. 调整液位计:根据比较结果,对液位计进行必要的调整。
如果液位计的误差较大,可能需要重新校准或维修液位计。
5. 重复测量和比较:重复以上步骤,对液位计进行多次测量和比较,以确保其准确性和可靠性。
需要注意的是,不同的液位计可能需要不同的校正方法和步骤。
因此,在实际应用中,应按照液位计的使用说明进行操作,并确保按照规定的程序进行校正。
同时,也需要注意液位计的维护和保养,以保证其准确性和可靠性。
罗斯蒙特超声波液位计调试方法
罗斯蒙特超声波液位计调试方法罗斯蒙特超声波液位计是一种常见的液位测量仪器,广泛应用于化工、石油、制药、食品等领域的液体、固体粉末和颗粒材料的液位测量。
在使用罗斯蒙特超声波液位计时,需要进行严谨的调试工作以确保测量精度和可靠性,接下来将介绍一份关于罗斯蒙特超声波液位计的调试方法。
1. 确认设备安装位置在进行超声波液位计的调试之前,首先需要确认设备的安装位置是否符合要求。
合适的安装位置对于保证测量精度意义重大。
安装位置需要避免有任何可能对波束传输和反射产生干扰的因素,如管道弯曲、挡板、隔板等。
2. 检查设备电气连接超声波液位计的电气连接需要仔细检查,确认所有的接线都牢固可靠且与供电系统匹配,确保设备能够正常供电。
要检查设备的接地连接情况,确保接地良好,从而保证设备的安全运行。
3. 波束角度调试超声波液位计的波束角度决定了其对液位测量的精度和范围,需根据实际情况进行调试。
合适的波束角度可以使得波束与液位垂直,减少因表面反射、多次反射等原因对测量精度的影响。
4. 进行空载测量在设备连接和波束角度调试完成后,需要进行空载测量,即在容器中没有液体的情况下进行测量,观察超声波液位计的输出信号,校准零位。
5. 进行载荷测量在空载测量完成后,需要将容器注入液体进行载荷测量,观察超声波液位计的输出信号,校准满位。
6. 调试附加功能罗斯蒙特超声波液位计通常还具备输送带功能,需要对此功能进行调试和校准,确保其正常工作。
如果设备配备了远程监控、报警功能,也需要进行相应的调试工作。
7. 记录和验证数据在完成上述调试工作后,需要记录设备调试过程中的相关数据,如波束角度、空载测量数据、载荷测量数据等,并进行数据验证,确保测量精度和可靠性。
总结:使用罗斯蒙特超声波液位计进行液位测量是一项精细的工作,需要严格按照上述调试方法进行操作,确保设备的准确测量。
只有经过严格的调试和校准,超声波液位计才能发挥其准确、可靠的液位测量功能。
伺服液位计调试讲解

进入爱护模式 浮子重量,刻在浮子外表 浮子体积,刻在浮子外表,需要
压力补偿。 测量钢丝体积为0.032cm3/m,
需要对产品密度进展补偿。 密度测量开头的位置 密度测量停顿的位置 密度测量方向 修正公式:
A2=手工密度-伺服密度
伺服液位计调试
密度相关的设置
伺服液位计调试
读取密度 R0~R9 D0~D9 TP
了。假设不是这样就必需更换力传感器。新的力传 感器必需标定。 ES = 605 钢丝上没有张力 马达没有解锁,测量钢丝可能断了,浮子已经丧失。 ES = 606 耦合同步错 磁鼓位置和内部计数位置不匹配。检查:WT = ED 或 EDE
伺服液位计维护
检查错误代码
EP = 014 XPU错误
RY=LLTHHT 子到
注:T: 到达报警位置或手动提升浮
LL报警位置,也将报警
RZ=EDED或者DEDE 不动作
E: 继电器通电后吸合 D:继电器
CO公共点 NO常开点 NC常闭点
4~20MA输出设置 24V电源 AK=A AM=+000.0000 AN=+015.0000
伺服液位计输出4~20mA需要外接
同时其他一些指令可能无效。可能是由于断电前一些指令 的数据没有存入Novram中。可能是由于在通电的状况下拔下 了XPU板。
处理步骤:
W2=ENRAF2
首先进入密码爱护2。
03 = @
EX
退出爱护模式2,重新初始化液位计。
伺服液位计调试
继电器报警和4~20mA输出
继电器开关报警输设置以下参数
DV=+.20230000E+03 <回车> 设置浮子体积〔数值刻在浮子上〕
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
854伺服液位调试培训手册1,ENSITE调试软件安装和基本操作:液位计安装完成后,确认接线正确,就可以送电了。
将ENRAF提供的调试软件ENSITE直接COPY到D盘,打开ENSITE文件夹中的可执行文件,按ALT+回车全屏化。
没点击SCAN后,选择1200(CIU的通讯波特率),COM1,ALL后按OK。
搜索完成后所有的现场仪表都显示在列表中,输入新的文件名,按确认就可以开始调试了。
单击ALL将所有表添加到右侧列表中,单击ENCASE,进入调试界面,按SPLIT=OFF打开显示窗口,SELECT可以任意切换罐,REQUEST是指令输入窗口,SEND送出指令。
指令送出后显示&表示成功,显示!058或者!053表示失败。
当然,调试同样可以使用手操器PET 在罐上进行。
所有指令都完全一一样。
当调试完液位计后,单击左侧的LOG,将液位计的所有设置备份到相应文件下:D:\ENSITE\DAT\文件名\罐名2,液位计基本设置:新的液位计送电后会显示+,这是出厂的设置。
输入FR停住浮子,检查DC(磁鼓周长是否和磁鼓上刻的是否一致)。
输入:W2=ENRAF2 指令输入密码DW=+.E+03 预设浮子的重量(数值刻在浮子上)(D isplacer W eight)DV=+.E+03 设置浮子体积(数值刻在浮子上)(D isplacer V olume)S1=+.E+03 预设测量液位(I1)时钢丝张力的平衡值(S et point1)S2=+.05000000E+03 设定浮子到罐底(I2)钢丝张力的平衡值(S et point2)TA=03 新的仪表地址(原先是00)(T ransmission A ddress)TI=TK-003 输入罐的编号,空格补齐6位(T ank I dentifier)WT=EDE 力传感器保护(W ire T ension protection)ML=+马达低限位由1米改成0。
(M otor limit switch L ow level)EX 退出(E xit)重新启动后需要再次SCAN搜索液位计。
然后重新进入设定界面。
液位计在重新启动后会,自动下落。
如果罐内已经有产品使用I2 使浮子穿过液位,落到罐底。
(I nterface 2)如果罐内没有产品,是空罐使用I1(I nterface 1)等到液位计浮子落到罐底,显示如:+010.1234 m INN、I1,则表示浮子落到罐底(由于导向管不垂直或者有毛刺导致浮子不能顺利落到罐底除外) 。
W2=ENRAF2 指令输入密码(P assword 2)RL=+ 设定罐底液位为零(R eference L evel)AR 液位计接受RL的值,然后重新启动(A ccept R eference level)I1 (如罐内有液位,使用I2)应该会显示+000.0030 m INN、I1 (不一定是3mm,可能会有2mm 的偏差)。
也可以根据实际检尺标定液位确认液位显示格式为+ m INN 时输入以下指令:(以上m带)W2=ENRAF2RL=+ 输入从现场检到的液位AR 液位计重新启动,接受标定值CA (CA librate) 升起浮子到达液位计标定接头的卡死位置,这个过程需要很长的时间,等到浮子不再上升,这时浮子高度应该高于整个球罐的直径。
(由于导向管安装不垂直,球阀安装法兰焊接不平整,标定接头安装错位,球阀没有全开等情况除外)。
记下这个高度。
UN 取消CA的命令(UN lock)I1 落下浮子1米的距离,要求浮子进入球阀以下。
FR 停住浮子(FR eeze)BT 液位计做平衡测试,需要5分钟。
等到出现FR后。
(B alance T est)BU 最大不平衡重量。
(Maximum Balance weight)BV 最小不平衡重量,BU-BV<3克。
(Minimum Balance weight)BW 记下这个数值。
(Average measured weight)W2=ENRAF2TT =+ 输入CA的高度。
(T ank T op level)HH=+ 输入高高报警液位(H igh H igh alarm level)HA=+ 输入高报警液位(H igh A larm level)LA =+ 输入低报警液位(L ow A larm level)LL =+ 输入低低报警液位(L ow L ow alarm level)MH=+ 输入MH=TT-0.2米的值(M otor limit switch H igh level)MZ =+ 输入MH=TT-0.2米的值(Locktest motor limit switch level)DW =+.E+03 输入BW的值(D isplacer W eight)S1 =+.E+03 S1=DW-15克EX这样就调试好了液位计。
液位计的显示格式如下:如果tt位置显示FL,查温度板错误代码EM,将返回值发给相关调试人员;如果ss位置显示FL,查伺服板错误代码ES,将返回值发给相关调试人员,以便查找出错原因,确定解决办法。
标定液位计步骤:W2=ENRAF2RL=+ 假设检尺数据为501mmAR修正水位步骤:首先确定S3值,在用I2指令将浮子完全放入油品中,FR指令停止。
BT做平衡测试,读出BW值减8g输入S3中。
W2=ENRAF2L3=+ 假设仪表测水位-检尺水位=5mm(L evel offset for interface 3)EX修正水位时L3=原来L3 值+(仪表测水位-检尺水位)所以计算新的L3 时应该先查询原来L3 的值3,温度设置:单点温度:接入单点温度计三限制PT100,a、c、b接入液位计1、2、3端子,设置:W2=ENRAF2MN=03 (三线制PT100)MO=+ (假设PT100的安装位置离罐参考零点)EX两点温度:W2=ENRAF2MT=SPLJ0=+ 液相PT100安装位置J1=+ 汽相PT100安装位置EX三点温度:平均温度计W2=ENRAF2MN=09 or 16MK=+MO=+EXMK、MO时请根据平均温度计铭牌上的参数和如下图的产品规格设置:任何时候当温度不能正常显示,请查询EM 4,伺服密度设置:首先输入SV指令,查看伺服液位计软件版本是否包含,如果包含的是,则不具有测量伺服密度功能。
设置:DI=K (密度单位设置,默认值为K-Kg/m3)DW=BW值(对浮子进行平衡测试BT,确保BU-BV<3g,将BW值输入DW)DV=+.E+03 (浮子的体积刻在浮子上,单位:cm3)DB=+ (最高密度测量点D9的中点,距液面)DZ=+ (最低密度测量点的中点,距罐零点)SD=D or U (密度测量方向,D从上至下,U从下至上)指令D0 – D9,每个密度测量点的中点指令R0 – R9,对应点测量的伺服密度SC 查询十个测量点密度的平均值,只有当所有密度点测量完成时才能查询伺服密度的内部计算公式:其中:R = measured servo density n (n: 0 .. 9)A1 = density scale factorA2 = density offset factor [kg/m3]RF = ambient air density [kg/m3], default value +.E+01Wire tension = tension in the measuring wire, measured by the force transducer伺服密度正常情况下是不需要修正的,如果伺服液位计测量的伺服密度和检尺数据相差太大,需要和相关ENRAF 调试工程师联系,帮助分析原因,确定修正方案。
从伺服密度的计算公式可以看出,可以通过调整A1(比例系数)和A2(偏移量)修正伺服密度。
A2new= A2+(R-Rsc)其中:R = 计量员检尺的平均密度Rsc = 伺服液位计测得的平均密度5,HIMS密度设置:HIMS密度的测量原理:通过罐底的压力变送器P1测量P1以上液柱的静压h、罐内的气相压力(通过P3测量)参见下图。
在P1以上的液位高度为h,通过液位计测量的液位减去LP的值。
LP是P1压力变送器相对于罐参考零点的高度。
产品的视密度可以按以下公式计算:其中:P7 = (P1 – P3)+ corrP1 = 压力变送器P1的压力[Pa]P3 =压力变送器P3的压力[Pa]Corr 各种修正系数LP = 压力变送器P1到罐零位的距离[m]LG = 本地的重力加速度[m/s2]Level 液位计测量的液位[m]各种修正系数:A,空气密度修正HIMS所用的压力变送器一般为差压变送器,负压室通大气。
要得到真空中的密度,还必须进行补偿。
差压变送器P1和P3在大气侧的压力为:其中LP = P1到罐零位的距离LM = P3到罐零位的距离RF = 大气的密度(kg/m3)LG = 本地的重力加速度(m/s2)一般缺省的值为kg/m3,如果需要得到空气中的密度,可输入RF=0。
B, 气相密度修正产品液位以上的气相将影响P1压力的测量,所以必须经过修正:其中LM = P3到罐零位的距离Level = 测量到的产品的液位RG = 气相的密度(kg/m3)LG = 本地的重力加速度(m/s2)C, P7的计算综合以上各种因素,最终参与密度计算的压力的计算公式如下:P7就是经过空气和气相修正的静压力,在HIMS系统中用于密度的计算。
入RF=0。
HIMS密度相关参数设置:W2=ENRAF2 进入密码保护2PI= K 压力单位kPaDI= K 密度单位kg/m3LM= 格式按照LD的规定,P3到罐零位的距离。
LN= 格式按照LD的规定,为最低的HIMS密度测量的液位高度,缺省为。
当液位低于LN时,将沿用最后一个有效的密度,因为低液位时会产生比较大的误差。
LP= 格式按照LD的规定,P1到罐零位的距离。
PA= 压力变送器的开关,例如:1-3:表示有压力变送器P1和P31--:表示只有压力变送器P1LG= 本地的重力加速度。
RF= 大气的密度,缺省为kg/m3。
RG= 罐内气相的密度。
HT= HIMS和HTG的选择开关。
‘I‘表示HIMS测量。
DL= 密度的低限报警值。
DU= 密度的高限报警值。
HD= 密度报警的回差值。
M1= 压力变送器P1的量程下限。
M3= 压力变送器P3的量程下限。
H1= 压力变送器P1的量程上限。
H3= 压力变送器P3的量程上限。
PH= 压力报警的回差值。
O1= 压力变送器P1 的零点漂移O2= 压力变送器P2 的零点漂移EX 退出密码保护最后用凑值法设定LP,更改LP值,直到QQ指令读出的HIMS密度和检尺密度完全一致。