舵机的构造和原理
舵机工作原理与控制方法

舵机工作原理与控制方法舵机是一种用于控制机械装置的电机,它可以通过控制信号进行位置或角度的精确控制。
在舵机的工作原理和控制方法中,主要涉及到电机、反馈、控制电路和控制信号四个方面。
一、舵机的工作原理舵机的核心部件是一种称为可变电容的设备,它可以根据控制信号的波形来改变电容的值。
舵机可分为模拟式和数字式两种类型。
以下是模拟式舵机的工作原理:1.内部结构:模拟式舵机由电机、测速电路、可变电容和驱动电路组成。
2.基准电压:舵机工作时,系统会提供一个用于参考的基准电压。
3.控制信号:通过控制信号的波形的上升沿和下降沿来确定舵机的角度。
4.反馈:舵机内部的测速电路用于检测当前位置,从而实现位置的精确控制。
5.驱动电路:根据测速电路的反馈信号来控制电机的转动方向和速度,从而实现角度的调整。
二、舵机的控制方法舵机的控制方法一般采用脉冲宽度调制(PWM)信号来实现位置或角度的控制。
以下是舵机的两种常见控制方法:1.脉宽控制(PWM):舵机的控制信号是通过控制信号的脉冲宽度来实现的。
通常情况下,舵机的控制信号由一系列周期为20毫秒(ms)的脉冲组成,脉冲的高电平部分的宽度决定了舵机的位置或角度。
典型的舵机控制信号范围是1ms到2ms,其中1ms对应一个极限位置,2ms对应另一个极限位置,1.5ms对应中立位置。
2.串行总线(如I2C或串行通信):一些舵机还支持通过串行总线进行控制,这些舵机通常具有内置的电路来解码接收到的串行信号,并驱动电机转动到相应的位置。
这种控制方法可以实现多个舵机的同时控制,并且可以在不同的控制器之间进行通信。
三、舵机的控制电路与控制信号1.控制电路:舵机的控制电路通常由微控制器(如Arduino)、驱动电路和电源组成。
微控制器用于生成控制信号,驱动电路用于放大和处理控制信号,电源则为舵机提供所需的电能。
2.控制信号的生成:控制信号可以通过软件或硬件生成。
用于舵机的软件库通常提供一个函数来方便地生成适当的控制信号。
舵机原理
一、舵机介绍1、舵机结构舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo。
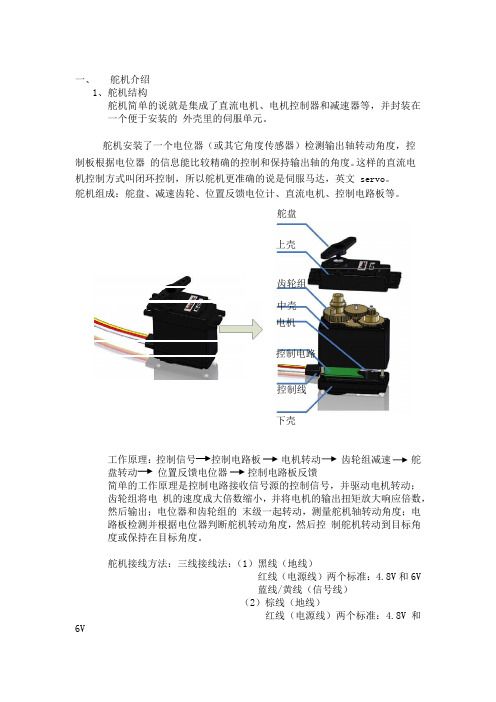
舵机组成:舵盘、减速齿轮、位置反馈电位计、直流电机、控制电路板等。
舵盘上壳齿轮组中壳电机控制电路控制线下壳工作原理:控制信号控制电路板电机转动齿轮组减速舵盘转动位置反馈电位器控制电路板反馈简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机接线方法:三线接线法:(1)黑线(地线)红线(电源线)两个标准:4.8V和6V蓝线/黄线(信号线)(2)棕线(地线)红线(电源线)两个标准:4.8V和6V黄线(信号线)二、舵机PWM信号介绍1、PWM信号的定义PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。
具体的时间宽窄协议参考下列讲述。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
关于舵机PWM信号的基本样式如下图其PWM格式注意的几个要点:(1)上升沿最少为0.5mS,为0.5mS---2.5mS之间;(2)控制舵机的PWM信号周期为20ms;2.PWM信号控制精度制定1 DIV = 8uS ; 250DIV=2mSPWM上升沿函数: 0.5mS + N×DIV0uS ≤ N×DIV ≤ 2mS0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS3、舵机位置控制方法舵机的转角达到185度,由于采用8为CPU控制,所以控制精度最大为256份。
舵机的工作原理

舵机的工作原理舵机是一种常见的控制设备,广泛应用于机械、电子、航空航天等领域。
它的工作原理基于电机和反馈系统的协同作用,能够将电信号转化为机械运动,实现精确的角度控制。
一、舵机的构成和工作原理舵机主要由电机、减速器、位置反馈元件和控制电路组成。
1. 电机:舵机通常采用直流电机作为驱动源。
电机的转动方向和速度由控制电路中的PWM信号控制,通过调节PWM信号的占空比,可以控制舵机的转动角度。
2. 减速器:舵机的电机通常采用高速低扭矩的设计,为了增加扭矩并减小转速,舵机内部通常会采用减速器来实现。
减速器可以将电机的高速低扭矩转换为低速高扭矩输出。
3. 位置反馈元件:为了实现精确的角度控制,舵机内部通常会搭载位置反馈元件。
常见的位置反馈元件有光电编码器、霍尔传感器等。
位置反馈元件可以实时检测舵机的转动角度,并将反馈信号传输给控制电路。
4. 控制电路:控制电路是舵机的核心部分,它接收来自外部的控制信号,并根据信号的变化来控制电机的转动。
控制电路通常由微控制器或专用的控制芯片组成,它会根据接收到的控制信号和位置反馈信号进行比较,计算出误差,并通过驱动电路控制电机的转动,使得舵机的转动角度与控制信号一致。
二、舵机的工作过程舵机的工作过程可以分为三个阶段:信号输入、误差计算和输出控制。
1. 信号输入:舵机通过信号线接收来自外部的控制信号。
通常情况下,舵机的控制信号采用PWM(脉宽调制)信号,信号的周期通常为20ms,脉宽范围为1ms到2ms。
其中,1ms对应舵机的最小角度,2ms对应舵机的最大角度。
2. 误差计算:控制电路会根据接收到的控制信号和位置反馈信号计算出误差。
误差通常通过将控制信号与位置反馈信号相减得出,如果误差为正,则电机需要顺时针转动;如果误差为负,则电机需要逆时针转动。
3. 输出控制:控制电路会根据计算得出的误差信号,通过驱动电路控制电机的转动。
驱动电路会根据误差信号的大小和方向,输出适当的电流给电机,使得舵机的转动角度逐渐接近控制信号指定的角度。
舵机工作原理
引言概述:舵机是一种常用于机械控制系统中的装置,主要用于控制运动装置的旋转或线性运动。
它在航空、机械工程、汽车、无人机等领域中都有广泛的应用。
本文将详细介绍舵机的工作原理,包括其结构、原理、控制信号等方面的内容。
正文:一、舵机的基本结构舵机通常由电机、减速器、位置传感器和电子控制电路等组成。
1. 电机:舵机一般采用直流电机,包括转子和定子。
电机通过转动来控制舵机的位置。
2. 减速器:舵机中的减速器用于减小电机的转速,并通过齿轮和齿条等机械传动装置将转动转化为线性或旋转运动。
3. 位置传感器:舵机常用的位置传感器有光电传感器和磁性传感器等,用于测量舵机的位置并反馈给电子控制电路。
4. 电子控制电路:舵机的电子控制电路负责接收控制信号,并根据控制信号控制电机和减速器的运转。
二、舵机的工作原理1. 控制信号输入:舵机的工作由控制信号决定,控制信号一般为脉冲宽度调制(PWM)信号。
信号的脉宽决定了舵机的位置。
2. 位置控制:控制信号被电子控制电路接收后,经过一定的处理,电子控制电路会根据控制信号的脉宽决定舵机的位置。
3. 反馈控制:舵机的位置传感器会不断测量舵机的位置,并将测量结果反馈给电子控制电路。
电子控制电路通过与目标位置的比较,调整电机和减速器的运转,以实现舵机的稳定控制。
4. 输出控制:根据电子控制电路的控制信号,舵机的电机和减速器会运转,从而实现位置的控制。
三、舵机的控制信号1. 脉宽范围:舵机的控制信号通常具有一个特定的脉宽范围,一般为1ms到2ms之间。
脉宽的最小值和最大值对应舵机的最左和最右位置。
2. 中立位置:控制信号的脉宽为舵机的中立位置。
舵机通过将控制信号设置为中立位置,可以保持在中间位置不动。
3. 工作速度:舵机的工作速度受控制信号的脉宽变化速度影响,脉宽变化越快,舵机的响应速度越快。
4. 工作精度:舵机的工作精度由控制信号和位置传感器的精度共同决定,控制信号的精度越高,舵机的工作精度越高。
简述舵机的结构及工作原理
简述舵机的结构及工作原理
一、结构
舵机主要由电机、减速器、位置反馈装置、控制电路和输出装置组成。
1. 电机:舵机内置有一种直流无刷电机,可提供高扭矩和精准的速度
控制。
2. 减速器:减速器是将电机提供的高速转动转换成低速高扭矩输出的
装置。
3. 位置反馈装置:位置反馈装置主要是用来检测舵机输出轴的位置,
并将信号反馈给控制电路。
4. 控制电路:控制电路是舵机的核心部件,它接收位置反馈信号,并
控制电机和减速器的运转,以实现舵机的精准定位和转动。
5. 输出装置:输出装置是连接在舵机输出轴上的杆件,其功能是将舵
机的输出扭矩传递给需要控制的机械部件。
二、工作原理
舵机通过接受来自遥控器或其他控制信号,控制舵机电机的轴向转动,从而转动输出装置,实现对机械部件的精准控制。
具体来说,舵机接收到控制信号后,控制电路会通过位置反馈装置来
检测输出轴的位置,并将电机控制器输出的电流的方向和大小进行调整,控制电机的转速和方向,从而实现舵机的转动和定位。
当舵机输出轴达到预设位置后,控制电路会停止控制电机转动,舵机也就完成了定位。
在实际的应用中,舵机通常被用来控制各种机械部件、机器臂或机器人等,实现精准的运动和位置控制。
总的来说,舵机通过精准的电机控制和位置反馈装置的配合工作,实现了对机械部件的精确控制,大大提高了机械装置的性能和精度。
舵机结构原理(一)

舵机结构原理(一)舵机结构原理什么是舵机?先给大家解释一下,什么是舵机。
舵机是一种能够控制转角的电机。
和普通电机相比,它能够精准控制转动的角度。
因此,在机器人,航模,机械手臂等系统中广泛应用。
舵机的构成舵机由电机、电子控制电路、减速齿轮、伺服控制电路、反馈电路和输出轴等组成。
电机舵机采用的电机为直流无刷电机。
电子控制电路舵机的电子控制电路主要包括芯片、晶振、陶瓷电容、电阻等元件。
减速齿轮普通直流电机旋转速度快而力量小,而舵机需要得到较大的扭矩。
因此,舵机装有减速齿轮箱将电机的速度降低,提高舵机的扭矩。
反馈电路舵机的反馈电路通常由电位器和反馈电路板组成。
电位器可以精确测量输出轴的位置和角度。
伺服控制电路伺服控制电路是舵机最核心的部件,它控制电机的旋转方向和旋转速度。
伺服控制电路的中心是一个小电机,也被称为伺服马达,它通过机械方式与输出轴相连。
舵机的工作原理舵机的工作原理是将电信号转化为机械运动。
舵机的输出轴可以旋转到特定的角度,角度的范围通常在0~180度之间。
当接收到驱动舵机的信号时,电子电路首先控制伺服控制电路旋转到指定位置,然后通过反馈电路检测输出轴的实际位置,去调整伺服电机使其旋转到指定的角度。
结语以上就是舵机的结构原理和工作原理的介绍。
在我们的日常生活以及工业制造中,舵机都扮演着非常重要的角色,对于我们的生活和工作都有着深远的影响。
舵机的分类按照舵机控制方式的不同,常见的舵机可以分为模拟舵机和数字舵机两种。
模拟舵机模拟舵机是在控制信号的基础上,通过调节正负脉宽信号的宽度和相位来控制输出轴的旋转角度。
模拟舵机在控制信号变化范围内能够达到连续性和流畅性较好的效果。
但是,由于信号的受干扰和干扰信号的存在,模拟舵机易受到环境影响,稳定性较差。
数字舵机数字舵机是采用数字信号进行控制的,能够直接控制输出轴的转角。
由于数字信号的稳定性好,能够有效防止干扰以及干扰信号的干扰,因此数字舵机的稳定性和精度更高。
舵机的工作原理
舵机的工作原理舵机是一种常见的电动执行器,广泛应用于机器人、航模、无人机、自动化设备等领域。
它通过接收控制信号来控制输出轴的角度位置,从而实现精确的位置控制。
舵机的工作原理主要涉及到电机、电子电路和反馈控制系统。
一、电机部分舵机的核心部件是一种直流电机,通常采用永磁直流电机。
该电机由电机转子、电机定子、电刷和永磁体组成。
当电流通过电机定子产生磁场时,磁场与永磁体之间的相互作用会产生转矩,使电机转子转动。
二、电子电路部分舵机内部还包含了一套电子电路,用于接收控制信号并将其转化为电机驱动信号。
电子电路主要由控制芯片、驱动电路和位置反馈电路组成。
1. 控制芯片:舵机的控制芯片通常是一种专用的集成电路,能够接收来自外部的控制信号,并根据信号的脉冲宽度来确定输出轴的位置。
常见的控制芯片有NE555、ATmega328等。
2. 驱动电路:驱动电路负责将控制芯片输出的信号放大,并通过适当的电流控制电机的转动。
驱动电路通常包括功率放大器、电流限制器等元件。
3. 位置反馈电路:为了实现精确的位置控制,舵机通常还配备了位置反馈电路。
位置反馈电路能够实时监测输出轴的位置,并将实际位置反馈给控制芯片,从而实现闭环控制。
三、反馈控制系统舵机的反馈控制系统是舵机工作的关键部分,它通过不断比较控制信号与实际位置反馈信号的差异,调整驱动电路的输出,使输出轴的位置能够精确地达到控制信号所要求的位置。
反馈控制系统通常采用PID控制算法,即比例-积分-微分控制算法。
PID控制算法根据当前位置与目标位置之间的差异,计算出一个控制量,用于调整输出轴的位置。
比例项决定了控制量与差异的线性关系,积分项用于消除稳态误差,微分项用于抑制系统的超调和震荡。
四、工作过程舵机的工作过程如下:1. 接收信号:舵机通过信号线接收来自控制器的控制信号,通常是一种PWM 信号。
2. 解码信号:舵机内部的控制芯片将接收到的信号进行解码,提取出脉冲宽度信息。
3. 位置控制:控制芯片根据脉冲宽度信息计算出输出轴的目标位置,并与实际位置进行比较。
一文读懂:舵机的内部结构和工作原理
一文读懂:舵机的内部结构和工作原理展开全文舵机实物图舵机是机器人旋转关节中的常用部件,尤其是小型机器人。
实物就像下面这张图,相信大家都不会陌生。
大家一定见过春晚上哪个跳舞的小机器人,其全身各关节都是有舵机组成。
我们常见到的舵机就是这个模样,一般是塑料外壳,当然很少见的也有金属外壳的舵机,因为涉及到控制信号,所以一般有三条引出线。
也有四条引出线的,可以输出花键轴的位置信息。
这么看,舵机好像和传统意义上的伺服电机有很多相似处,其实也可以这么称呼它。
舵机实物图引线图像上图所示的样子,舵机有一个三线的接口。
黑色线(或棕色线)是接地线,红线接+5V电压,黄线(或是白色或橙色)接控制信号端。
(而步进电机一般会有4~6根不等的引出线)舵机的内部结构各种品牌型号舵机的样子,长的几乎都是差不多的,一般情况下,舵机的输出轴都是偏向一边的,这是由于内部齿轮组的安装方式的原因,如果拆开舵机,我们就会发现更多真相。
我们可以很明显的看出,舵机和步进电机的动力是有着很大区别的,舵机的驱动力来自——直流电机,通过变速齿轮的传动和变速,将动力传输到输出轴,同时,舵机内部都设有角度传感器和控制电路板,用来参与舵机的转动角度的控制和信号的反馈检测工作。
内部构造如果还不够直观的话,我们再来看一张舵机实物的拆解图,你就不用再拆了,因为拆了也是一样的内部构造。
拆解图舵机的闭环检测机制关于舵机的精准位置控制,存在以下如下图的闭环控制机制。
即:位置检测器(角度传感器)是它的输入传感器,舵机转动的位置变化,位置检测器的电阻值就会跟着变化。
通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。
从而实现了舵机的精确转动的控制。
闭环检测舵机的工作原理舵机的工作原理可以通过下面这张简单的流程图说明,结合上面所说的闭环检测机制内容,相信你很轻松的就可以了解舵机的工作流程和工作原理了。
工作原理说到舵机的控制信号,一般是脉宽调制(PWM)信号,如下图,直观反映了PWM信号和舵机转动角度的关系,你也可以简单的理解为,通过给舵机通电的时间控制,结合角度传感器的反馈信号检测和控制,实现了舵机的精确角度控制。
舵机的工作原理
舵机的工作原理舵机是一种常用于控制机械运动的电子设备,广泛应用于机器人、航模、无人机等领域。
它能够根据输入的控制信号,精确地控制输出轴的位置,实现精确的运动控制。
本文将详细介绍舵机的工作原理。
一、舵机的组成结构舵机主要由电机、减速器、位置反馈装置和控制电路组成。
1. 电机:舵机采用直流电机作为驱动源,能够提供足够的转矩来驱动输出轴的运动。
2. 减速器:舵机的减速器用于减小电机输出的转速,同时增加输出轴的扭矩,以提供更精确的控制。
3. 位置反馈装置:舵机内部装有位置反馈装置,通常是一种称为“电位器”的装置。
它通过检测输出轴的位置,将实际位置信息反馈给控制电路。
4. 控制电路:舵机的控制电路接收外部的控制信号,根据信号的脉宽来确定输出轴的位置。
控制电路通过比较输入信号与反馈信号的差异,控制电机的转动,使输出轴达到预定的位置。
二、舵机的工作原理基于PWM(脉宽调制)信号的控制。
PWM信号是一种周期性的方波信号,其脉冲宽度可以调整。
舵机通过接收PWM信号来确定输出轴的位置。
当PWM信号的脉冲宽度为最小值时,舵机的输出轴会转到一个极限位置,通常是最左侧。
当脉冲宽度逐渐增大时,输出轴会逐渐向右转动,直到达到最大脉冲宽度时,输出轴会转到另一个极限位置,通常是最右侧。
舵机的控制电路会根据输入的PWM信号脉冲宽度来控制输出轴的位置。
当输入信号的脉冲宽度与输出轴的实际位置相同时,控制电路会停止电机的转动,保持输出轴的位置稳定。
三、舵机的工作模式舵机通常有三种工作模式:位置控制模式、速度控制模式和扭矩控制模式。
1. 位置控制模式:在位置控制模式下,舵机会根据输入信号的脉冲宽度来确定输出轴的位置。
较小的脉冲宽度会使输出轴转到最左侧,较大的脉冲宽度会使输出轴转到最右侧。
2. 速度控制模式:在速度控制模式下,舵机会根据输入信号的脉冲频率来确定输出轴的转速。
较高的脉冲频率会使输出轴转动得更快,较低的脉冲频率会使输出轴转动得更慢。
舵机的工作原理
舵机的工作原理舵机是一种常用的电机驱动装置,广泛应用于机器人、无人机、航模、机械臂等领域。
它的主要作用是控制机械装置的角度或位置,实现精确的运动控制。
在本文中,我们将详细介绍舵机的工作原理。
一、舵机的基本结构舵机主要由电机、减速机、控制电路和反馈装置组成。
1. 电机:舵机通常采用直流电机或无刷电机作为驱动源。
电机的转动产生动力,驱动舵机的输出轴运动。
2. 减速机:舵机的减速机主要由齿轮组成,通过减速比将电机的高速转动转换为输出轴的低速高扭矩转动。
3. 控制电路:舵机的控制电路是舵机的核心部分,它接收外部的控制信号,并根据信号的脉宽来控制舵机的角度或位置。
4. 反馈装置:舵机通常内置有位置反馈装置,如光电编码器或霍尔传感器,用于实时监测输出轴的位置,并将信息反馈给控制电路,以实现闭环控制。
二、舵机的工作原理舵机的工作原理可以简单概括为:接收控制信号→解码信号→驱动电机→输出轴运动→反馈装置监测位置→控制电路调整驱动信号。
1. 接收控制信号:舵机通过接收外部的控制信号来确定输出轴的位置。
控制信号通常采用脉冲宽度调制(PWM)信号,脉宽的变化对应着不同的角度或位置。
2. 解码信号:控制电路接收到控制信号后,会对信号进行解码,提取出脉宽信息。
3. 驱动电机:解码后的信号被送入舵机的驱动电路,驱动电路根据信号的脉宽信息来控制电机的转动。
通常情况下,舵机的驱动电路采用H桥电路来实现正反转和速度控制。
4. 输出轴运动:驱动电机的转动通过减速机传递给输出轴,使得输出轴按照设定的角度或位置运动。
5. 反馈装置监测位置:舵机内置的反馈装置会实时监测输出轴的位置,并将位置信息反馈给控制电路。
6. 控制电路调整驱动信号:控制电路根据反馈装置提供的位置信息,与输入信号进行比较,如果输出轴的位置与设定位置不一致,控制电路会调整驱动信号,使输出轴逐渐接近设定位置,实现闭环控制。
三、舵机的特点和应用舵机具有以下几个特点:1. 高精度:舵机能够实现较高的角度或位置控制精度,通常可以达到数度甚至更小的角度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
舵机的构造和原理2008-06-20 08:50:29 来源: 作者: 【大中小】评论:0条前言舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。
如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
本文章主要探讨适合各等级直升机各工作部位所使用的舵机,至於其它种类的模型,如飞机、车、船,则不在本篇文章讨论范围之内。
舵机的构造舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机发出讯号给舵机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已到达定位。
位置检测器其实就是可变电阻,当舵机转动时电阻值也会跟着改变,测量电阻值便可知转动的角度。
一般的伺服马达是将细铜线缠绕在三极转子上,当电流流过线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。
依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。
舵机为求转速快、耗电小,於是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的五极中空转子,并将磁铁置於圆柱体内,这就是无核心马达。
为了适合不同的工作环境,有防水及防尘设计的舵机。
并且因应不同的负载需求,舵机的齿轮有塑胶及金属的区分。
较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。
滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。
目前新推出FET舵机,主要是采用FET(Field Effect Transistor)场效电晶体。
FET具有内阻低的优点,因此电流损耗比一般电晶体少。
技术规格厂商所提供的舵机规格资料,都会包含外形尺寸(cm)、扭力(kg/cm)、速度(秒/60。
)、测试电压(V)及重量(g)等基本资料。
扭力的单位是kg-cm,意思是在摆臂长度1公分处,能吊起几公斤重的物体。
这就是力臂的观念,因此摆臂长度愈长,则扭力愈小。
速度的单位是sec/60。
,意思是舵机转动60。
所需要的时间。
电压会直接影响舵机的性能,例如Futaba S-9001在4.8V时扭力为3.9kg、速度为0.22秒,在6.0V时扭力为5.2kg、速度为0.18秒。
若无特别注明,JR的舵机都是以4.8V为测试电压,Futaba则是以6.0V作为测试电压。
所谓天下没有白吃的午餐,速度快、扭力大的舵机,除了价格贵,还会伴随着高耗电的特点。
因此使用高级的舵机时,务必搭配高品质、高容量的镍镉电池,能提供稳定且充裕的电流,才可发挥舵机应有的性能。
选择舵机标准的直升机需搭配5颗舵机,分别控制油门、副翼、升降舵、螺距及尾舵。
油门油门是所有动作中负载最轻的部位,且负载不会受到外在因素的影响而改变,所以选择油门舵机时,扭力不是问题(1kg就绰绰有馀),速度才是关键。
因为直升机的油门与螺距作混控,故油门与螺距舵机的速度最好要一致,才不会发生螺距舵机已到达定位,油门舵机却姗姗来迟的情况。
尤其作剧烈的3D飞行时,油门与螺距的变化量极大,若油门与螺距舵机的速度不协调,会发生马力延迟的状况。
油门舵机的速度并不是愈快愈好,因为还要考虑引擎的反应时间。
引擎必须经过吸气、压缩、爆炸、排气这一连串的步骤,尤其直升机用的引擎并不属於高转速型,因此舵机的速度如果太快,就会产生引擎运转速度跟不上舵机的动作,进而出现油气混合比不适当的状况。
建议采用速度为0.19~0.24秒的舵机。
副翼及升降舵30级及46级的直升机选择扭力3kg以上的舵机,60级的直升机则选择扭力5kg以上的舵机。
副翼及升降舵的反应速度,主要是由主旋翼转速及平衡翼片的重量所控制,与舵机的速度快慢,较无明显且直接的关联,所以不需使用太快的舵机。
建议采用速度为0.20~0.26秒的舵机。
螺距直升机的主旋翼螺距是出了名的重负载,因此螺距舵机的扭力一定要够,最好能选择扭力5kg以上的舵机。
建议采用速度为0.19~0.24秒的舵机。
尾舵尾舵舵机的扭力不需太大,3kg就已经足够了。
请依据您所使用的陀螺仪等级来搭配尾舵舵机。
机械式陀螺仪因为反应速度较慢,因此无需使用高速舵机。
压电式陀螺仪需搭配高速舵机,才能发挥陀螺仪的性能。
高级的陀螺仪都会指明建议使用的舵机,例如JR 5000T陀螺仪建议搭配NES-8700G舵机,Futaba GY-501陀螺仪建议搭配S-9205舵机。
若您使用的压电式陀螺仪并无特别指明舵机的类型,建议您购买速度愈快的舵机愈好。
如何以最经济的方式购买合用的舵机,请叁考下列步骤:1. 先决定螺距舵机,选择扭力5kg以上的舵机,再依据预算的多寡决定舵机的速度。
2. 依照螺距舵机的速度,选择同速度但扭力小的舵机,作为油门舵机。
3. 依据直升机的级数大小,选择扭力为3kg或5kg以上,速度为0.20~0.26秒的舵机,作为副翼及升降舵舵机。
4. 依据陀螺仪的等级来决定尾舵舵机的速度,愈高级的陀螺仪才需使用高级的舵机。
若您使用CCPM的直升机,因为是由副翼、升降舵及螺距舵机采混控的方式共同来推动十字盘,所以这三个动作要选择同型号的舵机。
CCPM的优点是连杆数少、传动直接、虚位小,并且可减轻舵机的负荷,延长舵机的使用寿命。
爱惜您的舵机一般说来舵机并不需要特别的保养,只要注意下列重点,就可使您的舵机长命百岁。
直升机的机械可动部份,不可小於舵机的行程活动范围。
不要随意改变电源电压,例如接收机用4.8V,请勿为了提升舵机的性能而改用6.0V。
机的相关原理与控制原理什么是舵机:在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。
舵机是一种俗称,其实是一种伺服马达。
还是看看具体的实物比较过瘾一点:2. 其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
3. 舵机的控制:舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。
以180度角度伺服为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;请看下形象描述吧:这只是一种参考数值,具体的参数,请参见舵机的技术参数。
小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。
如果需要更快速的反应,就需要更高的转速了。
要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。
如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。
在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。
而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。
一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。
其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟!使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。
听说A VR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。
其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。
主要还是delay memory这样的具有创造性的指令发挥了功效。
该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只用一个存储空间来存储延时参数好像还不够用的,所以我们可以采用2个内存单元来存放舵机的角度伺服参数了。
所以这样一来,我们可以采用这样的软件结构了:舵机驱动的应用场合:1. 高档遥控仿真车,至少得包括左转和右转功能,高精度的角度控制,必然给你最真实的驾车体验.2. 多自由度机器人设计,为什么日本人设计的机器人可以上万RMB的出售,而国内设计的一些两三千块也卖不出去呢,还是一个品质的问题.3. 多路伺服航模控制,电动遥控飞机,油动遥控飞机,航海模型等程序原理可以是这样的:pushw pwm0 ; //注意这里的pwmn指第n路的pwm参数值,是个16位数//据存放空间,相信8位机中一次操作个16位数据也是首见吧按这样写下去,一路PC写7个这样的伺服也一点不紧张的,因为PWM的周期是20毫秒,而最大脉宽才2.5毫秒,7*2.5=17.5毫秒。
写完了所有的脉冲后又做什么,跳回再等待下一个20毫秒有效的信号量。
而20毫秒的信号量从哪里来,因为多核心,当然可以随便拿个工作频率低点的CPU来产生啦。
这样一来,一颗14PIN的FPPA ,PDK80C02-SOP14就可以通过无线或者红外来精确控制7路舵机。
[本帖最后由zhlu8866 于2008-6-10 17:20 编辑]什么是舵机:在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。