目标规划的图解法
目标规划——建模与图解法

目标规划模型一般形式
L K min Pl [ ( lk d k lk d k )] l 1 k 1 n s.t. ckj x j d k d k g k , k 1,2, , K (LGP ) j 1 n aij x j (, )bi , i 1,2,, m j 1 x j , d k , d k 0, j 1,2, , n, k 1,2, , K
目标规划问题的提出
例5.1 某公司分厂用一条生产线生产两 种产品A和B ,每周生产线运行时间为 60小时,生产一台A产品需要4小时,生 产一台B产品需要6小时.根据市场预测, A、B产品平均销售量分别为每周9、8 台,它们销售利润分别为12、18万元。 在制定生产计划时,经理考虑下述4项 目标:
首先,产量不能超过市场预测的需求;
目标函数的基本形式有三种: (1) 要求恰好达到目标值,即使相应 目标约束的正、负偏差变量都要尽可 能地小。这时取 min(d+ + d- ); (2) 要求不超过目标值,即使相应目 标约束的正偏差变量要尽可能地小。 这时取 min(d+ ); (3) 要求不低于目标值,即使相应目 标约束的负偏差变量要尽可能地小。 这时取 min (d- );
不等式需要找到一个目标上界,这里可以估计为 252(=129 + 188),于是有
12x1 + 18x2 252; 第四个目标为: x1 9,x2 8;
目标规划模型的基本概念
(1)正、负偏差变量d+,d我们用正偏差变量d+ 表示决策值超过 目标值的部分;负偏差变量d- 表示决策 值不足目标值的部分。因决策值不可能 既超过目标值同时又末达到目标值,故 恒有 d+ d- = 0 . (2)绝对约束和目标约束 我们把所有等式、不等式约束分为两 部分:绝对约束和目标约束。
目标规划的图解法
目标规划的图解法目标规划(Goal Programming)是一种多目标规划方法,旨在解决多个冲突的目标。
它通过将多个目标转化为一个综合目标函数,通过权重分配的方式进行调整和权衡,以求得最优解。
目标规划的图解方法是通过在二维坐标系上画出各个目标函数的等高线,并找到这些等高线的交点来确定最优解。
以下是一个图解法的示例:假设有一个生产车间,共有两个目标需要考虑,分别是最大化产量和最小化成本。
生产车间有两个工人,工人A和工人B,其中工人A每小时可以生产10件产品,每小时的成本是100元;工人B每小时可以生产15件产品,每小时的成本是150元。
我们的目标是在规定的时间内(比如8小时)最大化产量,同时最小化成本。
首先,我们将产量和成本分别表示为二维坐标系的x轴和y轴。
x轴表示产量,y轴表示成本。
然后,我们在坐标系上画出两个目标函数的等高线。
对于产量目标,每个工人A每小时可以生产10件产品,工人B每小时可以生产15件产品。
因此,在8小时内,工人A最多可以生产80件产品(10 * 8 = 80),工人B最多可以生产120件产品(15 * 8 = 120)。
我们可以用两条直线分别表示工人A和工人B的产量限制。
对于成本目标,我们计算出在8小时内,分别用工人A和工人B生产的成本。
工人A的成本为100 * 8 = 800元,工人B的成本为150 * 8 = 1200元。
我们可以用两条直线分别表示工人A和工人B的成本限制。
接下来,我们需要确定产量和成本目标之间的权重。
在目标规划中,我们可以为每个目标设置权重,使其在最终的综合目标函数中起到不同的作用。
通常情况下,我们可以根据实际情况和需求来确定权重。
在这个例子中,假设我们将产量目标的权重设置为2,成本目标的权重设置为1。
最后,我们将两个目标函数的等高线综合在一起,形成一个新的目标函数的等高线。
通过找到所有等高线的交点,我们可以确定最优解的产量和成本。
在这个例子中,最优解的产量和成本交点便是最佳的制造方案。
目标规划的图解法
x1 2x2 10
d
2
D
d
2
d
3
d
3
x1
8x1 10 x2 56
例3 某厂装配黑白与彩色两种电视机,每装配一台电视机, 需占用装配线1小时,装配线每周开动40小时,预计市场每周彩 电销量为24台,每台可获利80元,黑白电视机销量为30台,每 台可获利40元,该厂的目标是:
第1优先级:充分利用装配 线每周开动40小时。 第2优先级:允许装配线加 班但每周加班时间不超过 10小时。 第3优先级:装配电视机数 量尽量满足市场需要,但
240
x1
,
x
2
,
d
i
,
d
i
0
i 1,2,3,4
d1
d
4
d
4
d1
d
3
d
3
d
2
x1
400
d
2
运筹学
min z
p1d1
p2
(d
2
d
2
)
p3
d
3
2x1 x2
11
x1
x2 d1 d1 0
x1
2 x2
d
2
d
2
10
8x1
10x2
d
3
d
3
56
x1 ,
x2
,
d
i
,
d
i
0
i 1,2,3.
x2
2x1 x2 11
x1 x2 0
d 1 d1
C
C(2,4),D(10/3,10/3)
运筹学
目标规划的图解法
步骤:
(1)先考虑硬约束与决策变量的非负约束, 同一般线性规划作图法;
目标规划的图解法共33页
σmn+2m
(二)、单纯形法的计算步骤
1、建立初始单纯形表。
一般假定初始解在原点,即以约束条件中的所有负偏 差变量或松弛变量为初始基变量,按目标优先等级从 左至右分别计算出各列的检验数,填入表的下半部 。
2、检验是否为满意解。判别准则如下: ⑴.首先检查αk (k=1.2…K)是否全部为零?如果全部为 零,则表示目标均已全部达到,获得满意解,停止计 算转到第6步;否则转入⑵。
1×60=60
1×58.3=58.3 < 100 由上可知:若A、B的计划产量为60件和58.3件时,
所需甲资源数量将超过现有库存。在现有条件下,此
解为非可行解。为此,企业必须采取措施降低A、B产
品对甲资源的消耗量,由原来的100%降至78.5%
(140÷178.3=0.785),才能使生产方案(60,
2、考虑产品受市场影响,为避免积压,A、B的生产
量不超过 60 件和 100 件;
3、由于甲资源供应比较紧张,不要超过现有量140。
试建立目标规划模型,并用图解法求解。
解:以产品 A、B 的单件利润比 2.5 :1 为权系数,
模型如下:
min
Z
P1
d
1
P2
(
2
.5
d
3
d
4
)
P3
d
2
30 2
d
2
d
2
)
P3
d
3
d
1
⑴
x1 x1
x2
d
1
d
1
0
2 x2
d
2
d
2
10
d
1
8
x
目标规划的图解法

假定重新确定这个问题的目标为:
P1: z的值应不低于1900; P2: 资源1必须全部利用. 将该问题转化为目标规划问题, 列出数学模型.
2019/5/23
3
根据题意, 以优先因子为序, 列出对应关系 优先因子
P1 : 100x1 50x2 1900 P2 : 10x1 16x2 200 约束转化:引入偏差变量
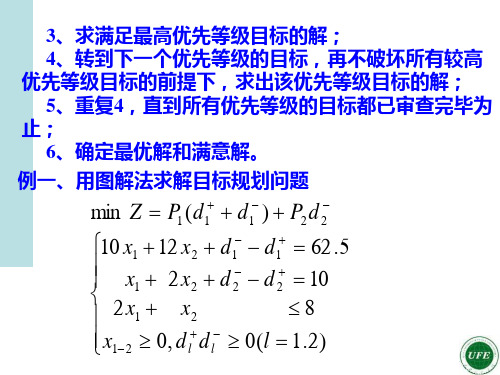
例 用图解法求如下目标规划问题
min
z
P1d1
P2
(d
2
d
2
)
P3d
3
s.t. 2x1 x2 11
x1 x2 d1 d1 0
x1
2x 2
d
2
d
2
10
8x1
10x2
d
3
d
3
56
x1
,
x
2
,
d
i
,
d
i
0, i
(1)
x1
2x2
d
2
d
2
4
x1
2x2
d
3
d
3
8
x1 ,x2 ,di ,di 0,i 1,2,3
min
z
P1d
3
P2d
2
P3 (d1
d
1
)
(2)
s.t.
6 x1 2 x2 d1 d1 24
运筹学课堂PPT4.2目标规划的图解法

x1
,
x2
,
d
j
,
d
j
d1 0
d1
80
(3)
最优解空间:ABCD
(2) C
B
x1
(1) (3)
min
Z
P1d1
P2
(d
2
d
2
)
P3
(d
3
d
3
)
P4d
4
3x1 12
(1)
x2
4 x2 16
复习:两平行直线间的距离公式
Ax By d d C(目标约束)
y
d d 0
Ax By C
d 0 ( x0 , y0 )
d
正负偏差变量中至少有一个零,如:
A2 B2
x Ax By C
Ax By d d C d 0, d 0
Ax By d C
Ax By C d C(在下半平面)
P2d4
P3d
3
P4 (2d1
d
2
)
x1 30 x2 20 / 3
x2
d1 0
d1 0
d
2
25 /
3
d2 0
d
3
680
d
3
0
d
4
0
d4 0
D
E(35/2,15)
(2)
min Z (0, 0, 680, 25 / 3)
F(30,20/3)
A
B
x1
(1)
(4) (3)
4.2 目标规划的图解法
差变量大于零的区域。
(1) (2) (3)
(平行) (4)
(2)
x1
目标规划图解法

§2目标规划的图解法和线性规划问题一样,图解法虽然只适用于两个决策变量的目标规划问题,但其操作简便,原理一目了然,并且有助于理解一般目标规划问题的求解原理和过程。
图解法解题的步骤为1.确定各约束条件的可行域,即将所有约束条件(包括目标约束和绝对约束,暂不考虑正负偏差变量)在坐标平面上表示出来;2.在目标约束所代表的边界线上,用箭头标出正、负偏差变量值增大的方向;3.求满足最高优先等级目标的解;4.转到下一个优先等级的目标,在不破坏所有较高优先等级目标的前提下,求出该优先等级目标的解;5.重复4,直到所有优先等级的目标都已审查完毕为止;6.确定最优解或满意解。
下面通过例子来说明目标规划图解法的原理和步骤。
例1 用图解法求解目标规划问题:解确定各个约束条件的可行域。
在x1O x2坐标平面上,暂不考虑每个约束方程中的正、负偏差变量,将上述每一个约束方程用一条直线表示出来,再用两个箭头分别表示上述目标约束方程中的正、负偏差变量。
如图(5-1)所示,其中,阴影区域OAB为满足条件(5.12)的可行域。
接着先考虑具有最高优先等级的目标,即。
为了实现这个目标,必须。
从图5-1可以看出,凡落在直线CD上的点都能体现。
但如果同时满足条件(5.12),则只有线段CH上的点才能实现。
这也就是说,在线段CH上的任何一点都能使最高优先等级目标。
其次考虑第二优先等级目标。
从图5.1可以看出,直线EF与EF右上方的点均能实现。
若同时满足条件5.12,则应为三角形AEI上的点能实现。
但第二优先等级目标的实现应在不影响第一优先等级目标的前提下,显然,在三角形AEI中,只有线段CG上的点才能实现这一要求,这就是问题的解。
于是,C,G两点及CG线段上的所有点(无穷多个)均是该问题的最优解。
其中C点对应的解为:x1=0,x2=5.2083;G点对应的解为:x1=0.6250,x2=4.6875;例 2已知一个生产计划的线性规划模型为;其中目标函数为总利润,则三个约束条件均为甲、乙、丙三种资源限制。
目标规划模型的求解(NO17)

工序
产品 A 工时定额
B
生产能力
加工
10
9
210
装配
5
6
120
毛利(元/件)
400
500
23
工厂领导提出下列目标:
(1)每个作业班的毛利不少于9800元;
(2)充分利用两个工序的工时,且已知加工工时费是装配 工时费的二倍;
(3) 尽量减少加班。
问:该工厂应如何生产,才能使这些目标依序实现?试建
立其数学模型。
8
初始单纯形表
min
Z
P1d1
P2
d
2
P3
(d
3
d
3
)
s.t.
3x1 x2
d1 d1 60
x1
x2
2x3
d
2
d
2
10
x1
x2
x3
d
3
d
3
20
xi
0;
d
i
0;
d
i
0(i
1,2,3)
min z1 d1 60 3x1 x2 d1 min z2 d2 min z3 d3 d3 20 x1 x2 x3 2d3
建立模型的电 子表格模型
4x1+3x2+ d3--d3+ =30
20
优化 目标1
P1: minZ1=d1-
优化 目标2
minZ2= d2++d2-
21
优化 目标3
P3: minZ3=d3-
此表也即为最优表,最优解为 x1 4.8, x2 4.8, d2 2, d3 3.6 :
目标的达到情况:
Z
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(l1 ) (l 2 ) (l3 )
Min Z Pd P d P d 1 1 2 2 3 3
x1 x2 d1 d1 10 2 x1 x2 d 2 d 2 26 x 2 x d d 1 2 3 3 6 x , x 0, d , d 0, (i 1, 2,3) i i 1 2 x2
d2
(l1 ) (l2 ) (l3 ) (l4 ) 最后考虑P3 级,此时 要求目标越小越好, 由图3-2可知R3 为四 按优先级高低,首先 边形CDEF 区域, 考虑P1 级目标,要求 目标越小越好,就在 绝约束的可行解域 △OAB中进一步缩小 为△OAC,记作R1来自Bl3l4
d1
l2
C
d3
s.t
5 x1 10 x2 60 x 2 x d d 0 1 2 1 1 4 x1 4 x2 d 2 d 2 36 再考虑 P2 级目标, 6 x 8 x d d 48 1 2 3 3 x , x 0, d , d要求目标越小越 ( i 1, 2, 3) i i 0, 1 2 好,因而解空间 x2 R2为△OCD 区域
(l1 ) (l2 ) (l3 ) (l4 )
解
将约束方程以直线形式画在图上,这里只使用决策变 量(即 x , x ),偏差变量在画直线时被去掉,直线画好后, 在该直线上标出目标函数中与该直线相关的偏差变量增大时 直线的平移方向(用垂直于直线的箭头来反映).如图 32.
Min Z Pd 1 1 P 2d2 P 3d3
(l1 )
考虑P2 级目标,由于直线 l2 与R1不相 ( l3 ) 交,所以在R1 内无法使 d 2 0 因此 在不退化P1 级目标时,不可能使P2 级 目标完全满足.这样R2 就缩为一点, d 因为在R1中,使 达到最小的为 A点, 所以:x* = (10 ,0), d
(l 2 )
l2
d2
l3
d1
B
o
R1
l1
A (10, 0)
d3
x1
图3-3 图解法示意图
由于R2仅含有一个点,所以对P3级目标,我们已
经无法进一步的选择与考虑,可求得 d , 即目标函数为:
min z P P
此例中,之所以产生解域R2退缩为一个点, 从而无法使P2,P3级目标达成,是因为P2级目标
x1 x2 d1 d1 10 2 x x d d 1 2 2 2 26 x 2 x d d 1 2 3 3 6 x , x 0, d , d 0, (i 1, 2,3) i i 1 2
目标规划图解法的具体演算过程与线性规划图解法类似. 第1步:根据决策变量(当然不能多于2个)绘画所有(软、 硬)约束条件的直线图形,偏差变量以移动(平移)直线的 方法加以考虑. 第2步:对P1级的各目标,确定解区域R1. 第3步:对下一个优先级别Pi 级各目标,确定它的最优解空间 Ri ,但必须是Ri Ri-1 ( i=2,3,…). 第4步:在这个过程中,如果某解区域Ri 减小到一点,则 可结束这个过程,因为此时没有进一步改进的可能. 第5步:重复第3、4步过程,直到解区域Ri 减少到一点或满 足 了所有k个级别的目标为止,此时,Rk 即为这个目标规划的最 优解区域,其中的任何一点均为目标规划的满意解.
R2
F
R3
R1
l1
o
A
E
D
x1
图3-2 图解法示意图
这个区域内的任一点均是该问题的满意解, 可使目标函数 min z 由于C、D、E、F 坐标分别为(6, 3)、(9, 0)、 (8,0)、(4.8 , 2.4), 故满意解可表示为:
( x , x ) (, ) (, ) (, ) (., .) ( . , . )
关于最优解:线性规划是在可行解域内寻找某一点, 使单个目标达到最优值(最大值或最小值).而目标规 划是在可行域内,首先寻找到一个使 P1级目标均满足的 区域R1,然后再在 R1中寻找一个使 P2级目标均满足或尽 最大可能满足的区域 R2 ( R1 ),再在 R2 中寻找一个满 足 P3 的各目标的区域 R3 ( R2R1 ), …, 如此下去,直 到寻找到一个区域Rk(Rk-1…R1),满足Pk级的各目标, 这个Rk即为所求的解域,如果某一个Ri (1 i k)已退化 为一点,则计算终止,这一点即为满意解,它只能满足 P1,…,Pi 级目标,而无法进一步改进,当然,此时或许 有低于Pi级目标被满足,这纯属巧合.
例5 求解下面目标规划:
Min Z Pd P d P d 1 1 2 2 3 3
s.t
5 x1 10 x2 60 x 2 x d d 2 1 1 0 1 4 x1 4 x2 d 2 d 2 36 6 x 8 x d d 2 3 3 48 1 x , x 0, d , d 0, ( i 1, 2, 3) i i 1 2
其中: , i (i ,,,) 这种满足所有目标要求的情况,即: min z 0 , 在实际中并不多见,很多目标规划问题只能满足前 面几级目标要求.
例6 用图解法求解下面目标规划问题:
Min Z Pd P d P d 1 1 2 2 3 3