树莓派 2B 使用手册资料(优.选)
myCobot 从入门到精通.pdf说明书
1.11.21.31.41.51.61.6.11.6.1.11.6.1.21.6.1.31.6.1.41.6.1.51.6.1.61.6.1.71.6.1.81.6.21.6.2.11.6.2.21.6.2.31.6.2.41.6.2.51.6.2.61.6.32.12.1.12.1.22.1.2.12.1.2.22.1.32.1.4Table of Contents介绍1 myCobot - 从入门到精通2 产品简介3 如何阅读4 使用用例5 快速开始6 myCobot 树莓派pymycobot1、机械臂左右摆动2、机械臂头部智能规划路线3、机械臂安全控制4、机械臂设备检测5、机械臂跳舞6、夹爪的使用7、机械臂校准8、控制吸泵myblocklyMyblockly 模块简介1、机械臂放松以及固定2、机械臂夹爪检测3、设置机械臂移动时间4、机械臂控制机制5、机械臂进阶操作Ros开发前的准备1 背景知识1.1 串联机器人1.2 软件背景知识1.2.1 github 1.2.2 arduino 1.3 电子背景知识1.4 力学背景知识2.1.52.22.2.12.2.22.2.32.2.42.32.3.12.43.13.23.2.13.2.23.33.43.4.13.53.5.13.5.23.5.33.5.43.5.53.63.73.83.8.13.8.1.13.8.1.23.8.1.33.8.23.8.2.13.8.2.23.8.33.93.9.13.9.21.5 电机与舵机知识2 了解 myCobot 硬件2.1 了解 Basic 主控2.2 了解 Atom 副控2.3 了解 MyCobot 舵机2.4 了解结构与固定3 myStudio3.1 下载与装载 myStudio 4 手机 app开发与使用软件平台与 API 1 arduino1.1 api 1.2 测试程序2 uiflow 3 python3.1 api 4 ROS&Moveit4.1 环境安装4.2 mycobot_ros 包安装4.3 控制与跟随4.4 键盘控制4.5 moveit 5 RoboFlow 6 通信与报文7 周边产品使用7.1 末端执行器7.1.1 夹爪7.1.2 吸盘7.1.3 笔夹7.2 底座7.2.1 G 型底座7.2.2 吸盘底座7.3 配件8 机器视觉开发8.1 设置环境8.2 颜色识别3.9.33.9.43.9.54.14.24.38.3 形状识别8.4 人脸识别8.5 QR 码识别4 其他1 维护与维修2 常见问题 FAQ3 资源myCobot小象机械臂 - 《从入门到精通》为什么设计myCobot人人都可以学习玩耍的入门级协作机器人myCobot的设计初衷是为了让对六自由度串联机械臂感兴趣的朋友,可以从0到1的了解、学习和操作机械臂,创造前所未有的机械臂使用体验与教学价值。
Raspberry Pi 产品说明书

Colophon© 2020 Raspberry Pi (Trading) Ltd.This documentation is licensed under a Creative Commons Attribution-NoDerivatives 4.0 International (CC BY-ND).build-date: 2021-10-19build-version: githash: 91fd59e-cleanLegal Disclaimer NoticeTECHNICAL AND RELIABILITY DATA FOR RASPBERRY PI PRODUCTS (INCLUDING DATASHEETS) AS MODIFIED FROM TIME TO TIME (“RESOURCES”) ARE PROVIDED BY RASPBERRY PI (TRADING) LTD (“RPTL) "AS IS" AND ANY EXPRESS OR IMPL IED WARRANTIES, INCL UDING, BUT NOT L IMITED TO, THE IMPL IED WARRANTIES OF MERCHANTABIL ITY AND FITNESS FOR A PARTICUL AR PURPOSE ARE DISCL AIMED. TO THE MAXIMUM EXTENT PERMITTED BY APPL ICABL E L AW IN NO EVENT SHAL L RPTL BE L IABL E FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPL ARY, OR CONSEQUENTIAL DAMAGES (INCL UDING, BUT NOT L IMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF L IABIL ITY, WHETHER IN CONTRACT, STRICT L IABIL ITY, OR TORT (INCL UDING NEGL IGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THE RESOURCES, EVEN IF ADVISED OF THE POSSIBIL ITY OF SUCH DAMAGE.RPTL reserves the right to make any enhancements, improvements, corrections or any other modifications to the RESOURCES or any products described in them at any time and without further notice.The RESOURCES are intended for skilled users with suitable levels of design knowledge. Users are solely responsible for their selection and use of the RESOURCES and any application of the products described in them. User agrees to indemnify and hold RPTL harmless against all liabilities, costs, damages or other losses arising out of their use of the RESOURCES.RPTL grants users permission to use the RESOURCES solely in conjunction with the Raspberry Pi products. All other use of the RESOURCES is prohibited. No licence is granted to any other RPTL or other third party intellectual property right.HIGH RISK ACTIVITIES. Raspberry Pi products are not designed, manufactured or intended for use in hazardous environments requiring fail safe performance, such as in the operation of nuclear facilities, aircraft navigation or communication systems, air traffic control, weapons systems or safety-critical applications (including life support systems and other medical devices), in which the failure of the products could lead directly to death, personal injury or severe physical or environmental damage (“High Risk Activities”). RPTL specifically disclaims any express or implied warranty of fitness for High Risk Activities and accepts no liability for use or inclusions of Raspberry Pi products in High Risk Activities.Raspberry Pi products are provided subject to RPTL’s Standard Terms. RPTL’s provision of the RESOURCES does not expand or otherwise modify RPTL’s Standard Terms including but not limited to the disclaimers and warranties expressed in them.IntroductionThe Raspberry Pi Build HAT is an add-on board that connects to the 40-pin GPIO header of your Raspberry Pi, which was designed in collaboration with LEGO® Education to make it easy to control LEGO® Technic™ motors and sensors with Raspberry Pi computers.It provides four connectors for LEGO® Technic™ motors and sensors from the SPIKE™ Portfolio. The available sensors include a distance sensor, a colour sensor, and a versatile force sensor. The angular motors come in a range of sizes and include integrated encoders that can be queried to find their position.The Build HAT fits all Raspberry Pi computers with a 40-pin GPIO header, including — with the addition of a ribbon cable or other extension device — Raspberry Pi 400. Connected L EGO® Technic™ devices can easily be controlled in Python, alongside standard Raspberry Pi accessories such as a camera module.The Raspberry Pi Build HAT power supply, available separately, is designed to power both the Build HAT and Raspberry Pi computer along with all connected LEGO® Technic™ devices.The L EGO® Education SPIKE™ Prime Set 45678 and SPIKE™ Prime Expansion Set 45681, available separately from LEGO® Education resellers, include a collection of useful elements supported by the Build HAT.NOTEThe HAT works with all 40-pin GPIO Raspberry Pi boards, including Raspberry Pi 4 and Raspberry Pi Zero. With the addition of a ribbon cable or other extension device, it can also be used with Raspberry Pi 400.•Controls up to 4 LEGO® Technic™ motors and sensors included in the SPIKE™ Portfolio•Easy-to-use Python library to control your LEGO® Technic™ devices•Fits onto any Raspberry Pi computer with a 40-pin GPIO header•Onboard RP2040 microcontroller manages low-level control of LEGO® Technic™ devices•External 8V PSU available separately to power both Build HAT and Raspberry PiPreparing your Raspberry PiRaspberry Pi recommend the use of Raspberry Pi Imager to install an operating system on your SD card. You will need another computer with an SD card reader to install the image.Using Raspberry Pi ImagerRaspberry Pi have developed a graphical SD card writing tool that works on Mac OS, Ubuntu 18.04, and Windows called Raspberry Pi Imager; this is the easiest option for most users since it will download the image automatically and install it to the SD card.Download the latest version of Raspberry Pi Imager and install it. If you want to use Raspberry Pi Imager from a second Raspberry Pi, you can install it from a terminal using sudo apt install rpi-imager. Then:•Connect an SD card reader with the SD card inside.•Open Raspberry Pi Imager and choose the required OS from the list presented.•Choose the SD card you wish to write your image to.•Review your selections and click on the Write button to begin writing data to the SD Card.NOTEIf using Raspberry Pi Imager on Windows 10 with controlled folder access enabled, you will need to explicitly allow Raspberry Pi Imager permission to write the SD card. If this is not done, the imaging process will fail with a "failed to write" error.You can now insert the SD card into the Raspberry Pi and power it up. For Raspberry Pi OS, if you need to manually log in, the default user name is pi, with password raspberry, and the default keyboard layout is set to United Kingdom (UK).You should change the default password straight away to ensure your Raspberry Pi is secure.Configuring the Serial PortOnce the Raspberry Pi has booted, open the Raspberry Pi Configuration tool by clicking on the Raspberry Menu button and then selecting “Preferences” and then “Raspberry Pi Configuration”.Click on the “interfaces” tab and adjust the Serial settings as shown below:to the Raspberry PiBuild HAT.Using a Headless Raspberry PiIf you are running your Raspberry Pi headless and using raspi-config, select “interface options from the first menu”.the serial connectionto the Raspberry PiBuild HAT usingraspi-config.Then “P6 Serial Port”.the serial connectionto the Raspberry PiBuild HAT usingraspi-config.Disable the serial console:Figure 4. Configuringthe serial connectionto the Raspberry PiBuild HAT usingraspi-config.And enable the serial port hardware.Figure 5. Configuringthe serial connectionto the Raspberry PiBuild HAT usingraspi-config.The final settings should look like this.to the Raspberry PiBuild HAT usingraspi-config.You will need to reboot at this point if you have made any changes.Preparing the Build HATAttach 9mm spacers to the bottom of the board. Seat the Raspberry Pi Build HAT onto your Raspberry Pi. Make sure youput it on the right way up. Unlike other HATs, all the components are on the bottom, leaving room for a breadboard orLEGO elements on top.Figure 7. Fitting theBuild HAT to yourRaspberry PiAccess the GPIO PinsIf you want to access the GPIO pins of the Raspberry Pi, you can add an optional tall header and use 15 mm spacers, seeFigure 8.Figure 8. TheRaspberry Pi BuildHAT connected usingthe optional tallheader and 15mmspacers.The following pins are used by the Build HAT itself and you should not connect anything to them.Powering the Build HATConnect an external power supply — the official Raspberry Pi Build HAT power supply is recommended — however anyreliable +8V±10% power supply capable of supplying 48W via a 5.5mm × 2.1mm × 11mm centre positive barrel connectorwill power the Build HAT. You don’t need to connect an additional USB power supply to the Raspberry Pi as well, unlessyou are using a Raspberry Pi 400.NOTEThe Build HAT can not power the Raspberry Pi 400 as it does not support being powered via the GPIO headers.Figure 9. Powering theBuild HAT using theRaspberry Pi BuildHAT power supply.NOTEThe LEGO® Technic™ motors are very powerful; so to drive them you’ll need an external 8V power supply. If you wantto read from motor encoders and the SPIKE™ force sensor, you can power your Raspberry Pi and Build HAT the usualway, via your Raspberry Pi’s USB power socket. The SPIKE™ colour and distance sensors, like the motors, require anexternal power supply.Connecting a MotorConnect a motor to port A on the Build HAT. The LPF2 connectors need to be inserted the correct way up. If the connectordoesn’t slide in easily, rotate by 180 degrees and try again.the Build HATInstalling the SoftwareInstall the Build HAT Python library. Open a Terminal window and type,$ pip3 install buildhatFor more information about the Build HAT Python Library see https://buildhat.readthedocs.io/.Start the Thonny IDE. Add the program code below:1 from buildhat import Motor23 motor_a = Motor('A')45 motor_a.run_for_seconds(5)Run the program by clicking the play/run button. If this is the first time you’re running a Build HAT program since the Raspberry Pi has booted, there will be a few seconds pause while the firmware is copied across to the board. You should see the red LED extinguish and the green LED illuminate. Subsequent executions of a Python program will not require this pause.Your motor should turn clockwise for 5 seconds.Change the final line of your program and re-run.5 motor_a.run_for_seconds(5, speed=50)The motor should now turn faster. Make another change:5 motor_a.run_for_seconds(5, speed=-50)The motor should turn in the opposite (anti-clockwise) directionCreate a new program by clicking on the plus button in Thonny. Add the code below:from buildhat import Motormotor_a = Motor('A')While True:print("Position: ", motor_a.get_aposition())Run the program. Grab the motor and turn the shaft. You should see the numbers printed in the Thonny REPL changing.Connect a Colour sensor sensor to port B on the Build HAT, and a Force sensor to port C.If you’re not intending to drive a motor, then you don’t need an external power supply and you can use a standard USB power supply for your Raspberry Pi.Create another new program:1 from signal import pause2 from buildhat import ForceSensor, ColorSensor34 button = ForceSensor('C')5 cs = ColorSensor('B')67 def handle_pressed():8 cs.on()9 print(c.get_color())1011 def handle_released():12 cs.off()Run it and hold a coloured object (L EGO elements are ideal) in front of the colour sensor and press the Force sensor plunger. The sensor’s LED should switch on and the name of the closest colour should be displayed in the thonny REPL.。
树莓派使用手册

树莓派入门册程亚红2017年9月目录第一章准备工作第二章烧录镜像第三章接线、点亮第四章散热片的安装第五章外壳及小风扇的安装一、准备工作必备物品:树莓派主板、电源、电源线、TF卡、TF卡读卡器、HDMI高清数据线、网线、散热片(3个)、小风扇、外壳。
温馨提示:①亲们直接拍下本店树莓派套餐即可,套餐里面的东西都是运行树莓派所必须的,缺一不可。
②大家可以根据自己的喜好选择3.5寸、7寸或者10寸三种尺寸的显示屏。
③如果您的家里有显示屏,但是接口是如图1所示的样子,那么您还需要额外购买一根HDMI转VGA转接线(本店有售),来连接显示屏和树莓派。
图1准备好这些东西,那么我们就可以开始行动啦!二、烧录镜像操作系统,镜像是资料里面带的标准镜像。
1.把镜像烧录到TF卡中(注意:第一次烧录的时候TF卡是空的,所以直接烧录进去即可,如果是第二次操作,需要先使用SD卡格式化软件,把SD卡格式化以后,再重新烧录新的固件。
)把需要解压的文件,先解压出来。
取出套件中的TF卡和读卡器,把TF插在读卡器上,然后把读卡器插在电脑上,留意一下读卡器在电脑中的盘符。
将读卡器接到电脑以后,打开刚解压出来的Win32DiskImager 程序:如果有报错的话,忽略掉,点OK继续。
点击右边的蓝色文件夹图标,然后选中刚才解压出来的Raspbian映像文件。
确保最右边Device中的盘符为你读卡器的盘符。
打开映像文件以后,点Write,然后点一下Yes确定操作。
整个写入过程需要一些时间来完成。
写入完毕以后,你会看到下面的信息,这时你就可以把你的Micro SD卡安全移除了。
三、接线、点亮注:本章使用的是7寸屏,其他类型的显示屏使用方法类似。
1.从电脑拔下读卡器,取出TF卡,插到树莓派背面的TF卡槽里,如下图所示。
2.接线:分别插上树莓派主板电源线,7寸屏电源线,用HDMI高清数据线连接7寸屏和树莓派主板。
3.确认接线无误后,把上图中的白色树莓派电源开关线拨到ON一边。
树莓派RaspberryPi使用简介
树莓派Raspberry Pi 使用简介你需要以下这些东西:一张Micro SD记忆卡一个SD读卡器,用于将系统映像写入到Micro SD卡中供电来源。
我们用的是一个旧的安卓手机充电器,你需要一个5V的micro USB接口充电器为它供电。
如果你是用的普通显示器而不是高清电视,你需要一条HDMI连接线与HDMI-DVI转换器。
如果你的显示器支持HDMI或者你打算使用电视机进行连接,那么你就可以省去转换器了。
USB接口的键盘和鼠标一条以太网线可选设备:用于保护Raspberry Pi的盒子除了键盘和鼠标之外,如果你打算要连接更多的USB设备,那么你需要一个USB Hub集线器。
我们在本文中使用的东西:一个Model B Raspberry Pi一张16GB Class 10 SanDisk Ultra SDHC记忆卡(传输率标为300MB/s)一个原本用于HTC Inspire的旧充电器罗技K260无线键鼠套装(两件只用一个接收器,因此只占用一个USB 口)一条RJ-45网线设置当你把上面的一切都准备好以后,我们就可以开始设置Raspberry Pi 了将Raspbian映像安装到Micro SD卡中Raspberry Pi出来已经有一段时间了,也正因如此,无论你是在用Windows、Mac OS X还是Linux,都有好几种方法将Raspbian的映像写到你的Micro SD卡中。
然而为了让这篇文章不变成介绍各种映像写入软件的文章,我们将会把最常用的方法展示给大家看:在OS X与Linux中我们将会用系统自带的dd工具写入,而在Windows中我们将会使用一个叫Win32DiskImager的工具进行。
为了让过程便得简单,我们建议你在开始操作前,先把下载文件夹清空。
然后,从这里下载Raspbian.zip。
在里面,选择最新的Raspbian来下载。
当然你也可以选择使用BT来下载,为了能让其他人继续用BT下载,我们建议你在下载完成后继续上传。
树莓派2B使用手册资料(优.选)

树莓派2B使用手册资料(优.选)树莓派2B 使用手册特别告示:A、树莓派只能使用5V 电源,若大于5V 必定致树莓派烧毁!B、还原TF 卡需下载SD格式化工具格式化TF卡,而不是简单的在Windows 下格式化,否则可能损坏TF 卡。
树莓派相关接口布局的认识:一、安装系统(本步骤在Windows 系统的pc 上操作而非树莓派。
本教程默认使用官方推荐系统——raspbian。
其它系统请自行尝试和折腾。
)1、Raspbian 下载,地址:/downloads/ (树莓派2B 必须使用2015 年 1 月31 日及之后的版本,否则不能用),解压缩到PC 上没有中文字符的文件夹下(即:如下图红框内,路径不能有中文或者特殊字符),得到.img 镜像文件2、下载镜像安装工具win32 disk imager: /aKtGY ,解压缩到PC上:3、将TF 卡(最少8G 容量)插入读卡器(别用笔记本自带卡槽,否则刷的系统极可能不完整,存在问题),在PC 上打开win32diskimager.exe,如上图;点击按钮1,选择第1 步得到的img 镜像文件;点击按钮2 选择TF 卡的盘符;点击按钮3(write)开始给TF 卡写入系统,其中会提示对话框,点YES 即可;点击按钮4(read)是备份(导出)TF 卡已装系统。
装系统由TF 卡写入速度决定,8 分钟左右。
系统安装成功后会提示“Write Successful”(装系统时勿做其他操作,存在系统写入失败损坏TF 卡的可能)。
此时关闭imager 工具,但别拔出TF 卡。
这时TF 卡只显示剩下几十M,正常的!这是由于TF 卡在装了Linux 系统后,分为三种格式,其中只有一种格式能被Windows 系统识别,也就是剩下那几十M。
二、系统配置1)、注意:若使用A V(RCA)接口电视,本步骤可忽略,但2B 须使用“3.5mm 转接头转换后”才可正常使用。
2)、HDMI、DVI 或VGA 接口显示器用户需要修改配置文件:在PC 上进入TF 卡,并找到文件config.txt,使用3、Notepad++(下载:/pVN9A )工具打开,依次将下面项目的“值”修改为等号后的数值,并去掉前面的“#”:hdmi_force_hotplug=1hdmi_gryuoup=2hdmi_mode=16hdmi_drive=2config_hdmi_boost=4sdtv_mode=2arm_freq=800项目释义:hdmi_mode=16 是分辨率修改项,通常为4、9、16;hdmi_drive=2,表示音频从HDMI 接口输出;arm_freq=800 为调频项,可为900、1000,修改前请务必做好散热准备,谨慎尝试,后果自负。
树莓派中文使用说明2012.03.08

快速入门指南树莓派——单板机英文原文来源:Raspberry Pi & Wiki第一章:RPi硬件基本设置你将需要的典型硬件配置:RPi可以在不需要增加额外硬件的情形下使用(除了电源供应模块),在此情况下她不能实现普通PC机的大部分功能。
如果你要她作为普通的PC来用,你可能还需要增加一些附加的硬件。
下面的硬件或多或少是必须的:·Raspberry Pi 主板·预装操作系统的SD卡·USB 键盘·显示器(带HDMI,DVI,Composite或SCART输入口)·电源供应模块·电缆线强烈建议的附加硬件包括:·USB 鼠标·Internet 连接器——一个带USB WIFI的适配器(模型A/B)者只一个LAN接口(模型B)·自带电源的USB集线器·机盒连接之后的示意图:你可以按照图表所示的方法把各种部件连接起来,或者按照以下的使用说明:1.将预安装操作系统的SD卡插入主板2.将USB键盘和USB鼠标插入主板,也可以通过USB集线器将键盘和鼠标一起接入主板,如果需要的话给USB集线器接上电源。
3.将视频线的一头接入显示器,另一头接入树莓派主板。
4.将其他的外设接入到树莓派主板(USB WIFI模块,以太网电缆,硬盘等等)这时你可能确实需要一个USB集线器来扩充你的USB口。
5.确定你的USB集线器和显示器工作正常6.将电源接到插座上。
7.打开显示器,将电源的另一头查到树莓派的电源插头上。
8.树莓派必须启动,然后显示启动信息在显示器上。
Pico PC RK3588S 树莓派使用手册说明书
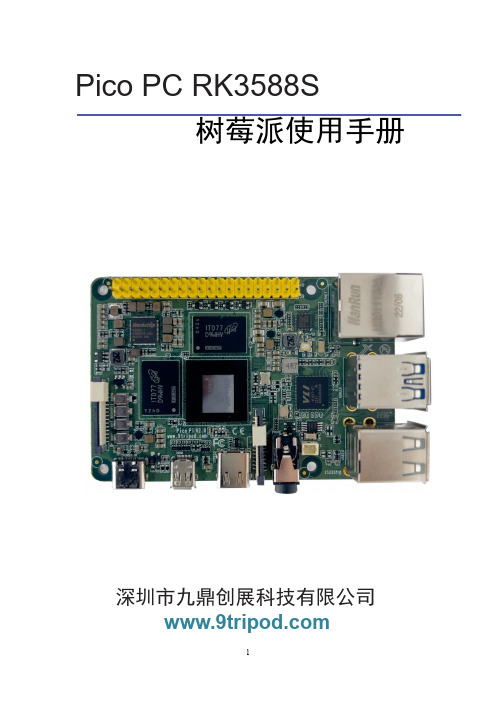
Pico PC RK3588S树莓派使用手册深圳市九鼎创展科技有限公司版权声明本手册版权归属深圳市九鼎创展科技有限公司所有,并保留一切权力。
非经九鼎创展同意(书面形式),任何单位及个人不得擅自摘录本手册部分或全部,违者我们将追究其法律责任。
敬告:在售开发板的手册会经常更新,请在网站下载最新手册,不再另行通知。
版本说明技术支持如果您对文档有所疑问,您可以在办公时间(星期一至星期五上午9:00~12:00;下午1:30~6:00)通过拨打技术支持电话、E-mail、留言到BBS论坛()。
网址:E-mail:********************销售与服务网络公司:深圳市九鼎创展科技有限公司地址:深圳市宝安区洪浪北二路信义领御研发中心1栋1412-1416电话:*************网址:论坛:,淘宝:阿里:速卖通:/store/2340163技术交流QQ群QQ群号X4418/ibox4418论坛199358213x6818/ibox6818论坛580119446RK3566/3568/3288一群159144256RK3566/3568/3288二群760685016RK3128/1808/PX30交流群573696929RK3588/3399/3399PRO交流群817913100MTK平台交流群630291376全志平台交流群436993280热烈欢迎广大同仁扫描右侧九鼎创展官方公众微信号,关注有礼,您将优先得知九鼎创展最新动态!目录版权声明 (2)第1章Pico PC RK3588S树莓派简介 (6)1.1产品简介 (6)1.2功能特性 (6)1.3软件资源 (6)第2章硬件资源 (8)2.1硬件接口描述 (8)2.2产品尺寸 (9)2.3规格参数 (9)第3章配置清单 (11)3.1标配硬件清单 (11)3.2选配硬件清单 (11)第4章其他产品介绍 (12)4.1核心板系列 (12)4.2开发板系列 (12)4.3卡片电脑系列 (13)第1章Pico PC RK3588S树莓派简介1.1产品简介1.2功能特性●内核:ARM Cortex-A76四核+Cortex-A55四核;●主频:2.4GHz;●内存:标配4GB或8GB LPDDR4/LPDDR4X,其他配置可按需订货;●Flash:16GB/32GB emmc可插拨;●2路USB HOST2.0接口;●2路USB HOST3.0接口;●1路全功能TypeC接口;●1路TypeC供电接口(仅用于供电);●2路3.3V TTL串口接口(含1路调试串口);●1路TF卡接口;●1个复位按钮,1个开关机按钮,1个强制升级按钮;●1路Micro HDMI输出接口;●1路DSI显示接口;●1路CSI摄像头输入接口;●耳机输出接口;●支持电容触摸;●板载高速双频WIFI蓝牙模块;●支持RTC时钟实时保存;●支持千兆有线以太网;●支持多路GPIO扩展;1.3软件资源Pico PC RK3588S树莓派主板支持android12/Linux/ubuntu/debain操作系统,详细驱动列表如下:Pico PC RK3588S树莓派主板驱动支持列表system driver linux+android12linux+debain10linux+ubuntu linux+QT7寸MIPI屏(1024*600)●●●●背光驱动●●●●PMIC驱动(RK806)●●●●电容触摸●●●●EMMC驱动●●●●SD卡驱动●●●●ADC驱动●●●●开关机●●●●休眠唤醒●两路USB HOST2.0驱动●●●●两路USB HOST3.0驱动●●●●一路TypeC驱动●●●●RTC驱动●●●●音频●●●●录音●不支持不支持不支持WIFI/BT●●●●CSI摄相头驱动●不支持不支持●USB口摄相头驱动●●●●串口●●●●HDMI OUT●●●●千兆以太网●●●●USB鼠标键盘●●●●第2章硬件资源2.1硬件接口描述硬件接口介绍标号名称说明【1】GMAC千兆以太网接口,PCIE接口【2】HOST3.0双层USB HOST3.0接口【3】HOST2.0双层USB HOST2.0接口【4】RTC RTC钮扣电池【5】耳机座4级带MIC耳机座【6】MIPI CSI MIPI摄像头接口【7】TypeC接口标准TypeC接口,用于程序下载等【8】HDMI OUT Micro HDMI输出接口【9】5V IN5V直流电源输入,标准TypeC电源输入接口【10】独立按键boot按键,用于maskrom或强制升级【11】独立按键复位按键【12】独立按键在升级时用作Recovery键【13】独立按键PWRKEY【14】显示接口DSI接口【15】GPIO扩展口约28个GPIO扩展口【16】RK3588S主控芯片【17】UART2UART2,TTL电平接口,默认为调试串口【18】WIFI-BT双频WIFI5.0、BT模块【19】EMMC存储ROM,可插拨,默认16G或32G可选【20】TF卡TF卡座2.2产品尺寸2.3规格参数基本参数SOC RockChip RK3588SCPU八核64位(4×Cortex-A76+4×Cortex-A55),8nm先进工艺,主频高达2.4GHzGPU ARM Mali-G610MP4四核GPU支持OpenGL ES3.2/OpenCL2.2/Vulkan1.1,450GFLOPSNPU NPU算力高达6TOPS,支持INT4/INT8/INT16混合运算,可实现基于TensorFlow/MXNet/PyTorch/Caffe等系列框架的网络模型转换ISP集成48MP ISP with HDR&3DNR编解码视频解码:8K@60fps H.265/VP9/AVS28K@30fps H.264AVC/MVC4K@60fps AV11080P@60fps MPEG-2/-1/VC-1/VP8视频编码:8K@30fps编码,支持H.265/H.264*最高可实现32路1080P@30fps解码和16路1080P@30fps编码内存4GB/8GB/16GB64bit LPDDR4/LPDDR4x(最高可配32GB)存储16GB/32GB eMMC硬件参数以太网千兆以太网无线网络 2.4G/5G双频WIFI,支持扩展4G无线模块视频1×HDMI2.1(8K@60fps或4K@120fps)1×MIPI-DSI(4K@60fps)音频1×Phone输出(带MIC)1×Micro HDMI音频输出USB2×USB3.01×TypeC2×USB2.0电源DC5V输入(TypeC接口)其他接口1×CSI、1×DSI、1×UART、1×Debug、28×GPIO系统软件系统Android:Android12.0Linux:Ubuntu、Debian11、Buildroot其他参数尺寸85mm×56mm(标准树莓派尺寸)重量约50克散热散热器安装孔距:参考树莓派功耗待机功耗:约0.375W(5V/75mA)典型功耗:约1W(5V/200mA)最大功耗:约9W(5V/1800mA)环境工作温度:-10℃-70℃存储温度:-20℃-70℃存储湿度:10%~80%第3章配置清单3.1标配硬件清单●Pico Pi(RK3588S)主板一套●TypeC数据线1根●USB转串口转接板1个●网盘资料链接(通过客服获取)3.2选配硬件清单●5V电源适配器一个●7寸1024*600电容触摸MIPI液晶模组●1300W像素摄像头一个●USB摄相头一个第4章其他产品介绍4.1核心板系列处理器型号核心板型号备注S5P4418X4418CV3.5/X4418CV4180PIN邮票孔接口I4418CV2200PIN板对板连接器S5P6818X6818CV3.5/X6818CV4180PIN邮票孔接口I6818CV2200PIN板对板连接器RK3128X3128CV4144PIN邮票孔接口I3128CV1112PIN邮票孔接口PX30X30CV1144PIN邮票孔接口X30CV2144PIN邮票孔接口RK3288X3288CV3180PIN邮票孔接口I3288CV1220PIN邮票孔接口RK3399X3399CV3200PIN邮票孔接口X3399CV4200PIN邮票孔接口RK3399pro X3399proCV1.2220PIN邮票孔接口RK1808X1808CV1144PIN邮票孔接口MT8385X8385CV1168PIN邮票孔接口MT8768X8768CV1168PIN邮票孔接口A40I X40ICV2172PIN邮票孔接口T507X507CV2172PIN邮票孔接口RK3566X3566CV2/X3566CV3200PIN邮票孔接口RK3566I3566CV1172PIN邮票孔接口RK3568X3568CV2200PIN邮票孔接口RK3568I3568CV1172PIN邮票孔接口RK3588I3588CV1320PIN板对板连接器4.2开发板系列处理器型号开发板型号备注S5P4418x4418开发板x4418cv3评估板S5P6818x6818开发板x6818cv3评估板i6818开发板i6818cv2评估板RK3128X3128开发板x3128cv4评估板I3128开发板I3128CV1评估板PX30X30开发板x30cv1评估板RK3288x3288开发板x3288cv3评估板i3288开发板i3288cv1评估板RK3399x3399开发板x3399cv3/x3399cv4评估板RK3399pro x3399pro开发板x3399pro评估板RK1808x1808开发板x1808cv1评估板MT8385X8385开发板X8385CV1评估板MT8768X8768开发板X8768CV1评估板A40I X40I开发板X40ICV2评估板T507X507开发板X507CV2评估板RK3566X3566开发板X3566CV2/X3568CV3评估板RK3566I3566公板I3566CV1评估板RK3568X3568开发板X3568CV2评估板RK3568I3568公板I3568CV1评估板RK3588I3588开发板I3588CV1评估板RK3588S X3588S mini ITX主板X3588SCV1评估板4.3卡片电脑系列处理器型号卡片电脑型号备注Exynos4412ibox4412卡片电脑S5P4418ibox4418卡片电脑S5P6818ibox6818卡片电脑RK3399ibox3399卡片电脑RK3568ibox3568卡片电脑RK3588S Pico Pi说明:产品详细规格,以及更多其他产品请关注九鼎创展官方网站和论坛。
树莓派 入门使用手册 官方屏一体机入门手册

Raspberry Pi 3官方套件入门指南(Rev.A)i目录第1章 (1)Raspberry PI 3官方套件介绍 (1)1.1产品概述 (1)1.1.1Raspberry Pi 3套件特点 (1)1.1.2Raspberry Pi 3套件介绍 (2)1.2技术支持及详细资料 (4)第2章 (5)Raspberry Pi 3官方套件安装 (5)2.1R ASPBERRY P I 3套件软件系统安装 (5)2.1.1.SD卡安装NOOBS系统 (5)2.1.2.SD卡安装Raspbian系统 (7)2.1.3.旋转屏显 (8)2.2R ASPBERRY P I 3套件硬件安装 (8)2.2.1安装散热片 (9)2.2.2安装SD卡 (9)2.2.3安装触摸屏 (9)2.2.4安装外壳 (12)2.2.5电源连接 (13)第3章 (14)Raspberry Pi 3套件的软件入门操作 (14)3.1R ASPBERRY P I 3套件软件操作准备工作 (14)3.1.1上电准备 (14)3.1.2旋转屏显 (14)3.2R ASPBERRY P I 3网络连接 (15)3.2.1有线网络连接 (15)3.2.2WiFi网络连接 (16)3.3R ASPBERRY P I 3系统更新及升级 (16)3.3.1更新系统 (16)3.3.2升级系统 (17)3.3.3查看SD卡的空间 (17)3.4R ASPBERRY P I 3安装其他应用文件 (17)附录A (18)Raspberry Pi 3 GPIO定义 (18)A.140PIN GPIO定义 (18)第1章Raspberry PI 3官方套件介绍1.1 产品概述Rasapberry Pi(中译:树莓派)是能够和一个键盘一起插入你的电视的信用卡大小的电脑。
这是一个性能足够强的小电脑,可以在电子工程中使用,并且能够做许多台式电脑做的事情,比如制作电子表格,处理文档和玩游戏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
树莓派2B 使用手册
特别告示:A、树莓派只能使用5V 电源,若大于5V 必定致树莓派烧毁!B、还原TF 卡需下载SD格式化工具格式化TF卡,而不是简单的在Windows 下格式化,否则可能损坏TF 卡。
树莓派相关接口布局的认识:
一、安装系统(本步骤在Windows 系统的pc 上操作而非树莓派。
本教程默认使用官
方推荐系统——raspbian。
其它系统请自行尝试和折腾。
)
1、Raspbian 下载,地址:/downloads/ (树莓派2B 必须使用2015 年 1 月31 日及之后的版本,否则不能用),解压缩到PC 上没有中文字符的文件夹下(即:如下图红框内,路径不能有中文或者特殊字符),得到.img 镜像文件
2、下载镜像安装工具win32 disk imager: /aKtGY ,解压缩到PC上:
3、将TF 卡(最少8G 容量)插入读卡器(别用笔记本自带卡槽,否则刷的系统极可能不完整,存在问题),在PC 上打开win32diskimager.exe,如上图;
点击按钮1,选择第1 步得到的img 镜像文件;
点击按钮2 选择TF 卡的盘符;
点击按钮3(write)开始给TF 卡写入系统,其中会提示对话框,点YES 即可;
点击按钮4(read)是备份(导出)TF 卡已装系统。
装系统由TF 卡写入速度决定,8 分钟左右。
系统安装成功后会提示“Write Successful”(装系统时勿做其他操作,存在系统写入失败损坏TF 卡的可能)。
此时关闭imager 工具,但别拔出TF 卡。
这时TF 卡只显示剩下几十M,正常的!这是由于TF 卡在装了Linux 系统后,分为三种格式,其中只有一种格式能被Windows 系统识别,也就是剩下那几十M。
二、系统配置
1)、注意:若使用A V(RCA)接口电视,本步骤可忽略,但2B 须
使用“3.5mm 转接头转换后”才可正常使用。
2)、HDMI、DVI 或VGA 接口显示器用户需要修改配置文件:在PC 上进入TF 卡,并找到文件config.txt,使用
3、Notepad++(下载:/pVN9A )工具打开,依次将下面项目的“值”修改为等号后的数值,并去掉前面的“#”:hdmi_force_hotplug=1
hdmi_gryuoup=2
hdmi_mode=16
hdmi_drive=2
config_hdmi_boost=4
sdtv_mode=2
arm_freq=800
项目释义:hdmi_mode=16 是分辨率修改项,通常为4、9、16;hdmi_drive=2,表示音频从HDMI 接口输出;arm_freq=800 为调频项,可为900、1000,修改前请务必做好散热准备,谨慎尝试,后果自负。
至此系统已基本安装、配置好,拔出TF 卡插入树莓派背部卡槽。
(若仍不显示则尝试仅去掉hdmi_safe=1 前面的#,其他每行开头加上#)
三、配件
1、无论您有多少外设配件,请务必使用5v 2a 电源(树莓派2 代
B 型,官方要求至少5V 1.8A),且在接通电源之前,确保其它配件
都已连上。
原则:最后插电源线,也就是最后接通电源。
2、HDMI 转VGA 转换器、USB 集线器,最好能独立供电。
集线器请勿使用反向供电的,反向供电绕过了树莓派上所有自我保护的电路设计,电压电流过高过大易导致烧毁树莓派。
四、树莓派raspi-config 工具
初装系统首次启动过程中,会出现raspi-confi界面,如左图(用sudo raspi-config 命令亦可调出;界面会因系统版本差异而有所细
小不同)。
以下第1、3、4 步必须做,其他随意,可做了解。
1、Expand Filesystem,将系统扩展到整个TF 卡,必须执行,一路敲回车即可;
2、修改密码及账号,若要修改,请铭记。
3、开机启动到桌面,或Scratch(编程寓教工具);进入条目后,找到有“desktop”的条目,一路回车(以下设置完成后,重启即可自动进入桌面)。
4、地区/语言(汉化):进入本项后,选择Change locale 并进入,用键盘上下键找到en_GB.UTF-8 UTF-8,敲空格键去掉前面的*,依次找到en_US.UTF-8 UTF-8、zh_CN UTF-8 UTF-8、zh_CN GBK GBK,敲空格键打*,然后利用Tab 键将光标移到OK,回车进入下一步。
选择zh_CN UTF-8 UTF-8,再选OK,回车,等待几分钟。
汉化至此完成。
5、CSI 摄像头开启/关闭,进入本项后,选择enable 则开启。
6、将树莓派加入Rastrack 网站。
7、超频;一般不用超频,谨慎操作,提前做好散热,建议风扇,夏天散热量大。
8、高级选项,包括Overscan、Hostname、Memory Split(内存分配)、SSH、Spi、Update。
9、本机相关信息。
设置完成后,光标移到<Finish>,回车,自动重启。
至此,您的树莓派基本设置完成!
五、联网
1、用网线将树莓派连结到路由器,系统会自动获得IP。
要想这一步骤简单,前提是:系统装正确了,完整了,且路由器未做任何其它限制性设置(故此,请保持路由器是默认状态)。
2、2015-2-16 及之前系统版本:无线网卡联网,打开桌面WiFi Config,点击Scan,双击你的无线账号,在PSK后面输入密码,回车,即可获得IP。
(若不显示wlan0 之类的,那么必定是系统没装正确,请重做系统,或使用命令行方式设置无线。
必定OK。
)
3、2015-5-5 及之后的版本:在顶部任务栏,右侧,可以看到“电脑图标”,鼠标移动到此处,会自动罗列出搜索到的WIFI 账号,也可以通过右键进行相关设置。
选择你的WIFI 账号输入密码,OK 了。
六、杂项及疑难:
Raspbian 默认账号/密码:pi / raspberry (输入密码不会有显示,更无“***”这类提示。
请勿将系统放在有“中文或特殊字符”命名的文件夹,否则安装系统会提示错误:error123,导致装不了。
备份系统:/aUUYc ;
在MAC OS 系统下装系统教程:/aUUXg
由于笔记本和树莓派都是视频输出,没有输入,故笔记本不能作为树莓派的显示器,除非远程访树莓派:网线将树莓派和路由器连结,启动树莓派,路由器自动为树莓派分配IP,通过PUTTY 软件(请百度搜索下载)实现远程访问。
详情:/bX0LE 树莓派若不装系统,不会有任何反应,只会亮红灯,表示通电了,仅此而已。
警告:千万不要用官方提供的Noobs系统,并不是那么容易玩转。
切记。
温度:树莓派温度一般在35-75 波动。
查看主板温度命令:sudo /opt/vc/bin/vcgencmd measure_temp ;
VNC 安装教程:/pQW6y
看电影/视频/电视及相关配置调试终极教程:/aKHSl
中文字库:sudo apt-get install ttf-wqy-microhei ttf-wqy-zenhei xfonts-wqy
拼音输入法:sudo apt-get install scim-pinyin
五笔:sudo apt-get install scim-tables-zh
装谷歌浏览器:sudo apt-get install chromium-browser chromium-l10n
办公软件:sudo apt-get install -l10n-zh-cn
无线网卡联网情况比较复杂,涉及方面多:距离、网络、路由器设置、树莓派系统的设置、障碍物等,请多尝试。
另:无线账号密码不宜过长,宜短,否则会出现无法联网。
七、Windows10 IoT:
1、安装Windows10 IoT 教程:/thread-26220-1-1.html
2、Windows7 下安装Windows10 IoT 教程:/thread-26427-1-1.html
八、Ubuntu mate:
树莓派版ubuntu 下载地址:/downloads/ (说明:账号/密码: ubuntu/Ubuntu;安装方法跟安装raspbian 一样。
) 九、树莓派GIPO 定义图(1 代B+和 2 代 B 之GPIO 定义完全一样):
十、风扇安装说明:
风扇---------Pi GPIO
红线接------ Pin4 (5V)
黑线-------- Pin6(GND、Ground)
这是ABS材质的外壳风扇安装图
此图是亚克力外壳风扇安装图
十一、散热片粘贴
对比下图,粘贴散热片:
最新文件---------------- 仅供参考--------------------已改成word文本--------------------- 方便更改
11 / 11word.。