距离矢量路由算法模拟
网络工程师基础知识(选择题)模拟试卷29(题后含答案及解析)
网络工程师基础知识(选择题)模拟试卷29(题后含答案及解析) 题型有:1.1.在路由器中,可用以下______命令查看路由器的路由表。
A.arp-aB.tracerouteC.route printD.display ip routing-table正确答案:D解析:arp-a:查看所有MAC地址与IP地址间的地址解析列表。
traceroute:Linux命令,在MS Windows中为tracert。
通过该命令可以知道信息从你的计算机到互联网另一端的主机走的是什么路径。
route print:显示主机路由表的内容。
路由表分为五列:第一列是网络目的地址,列出了路由器连接的所有网段;网络掩码列提供这个网段本身的子网掩码,而不是连接到这个网段的网卡的子网掩码;第三列是网关,网关表告诉路由器这个数据包应该转发到哪一个IP地址才能到达目的网络;接口列告诉路由器哪一个网卡连接到了合适的目的网络,从技术上说,接口列仅告诉路由器分配给网卡的IP地址;最后一列是测量。
display ip routing-table:用来查看路由表的摘要信息。
该命令以摘要的形式显示路由表信息,每一行代表一条路由内容,包括目的地址/掩码长度、协议优先级度量值、下一跳输出接口,使用该命令仅能查看到当前被使用的路由,即最佳路由。
2.关于距离矢量的算法,以下说法错误的是______。
A.距离矢量算法不会产生路由环路问题B.距离矢量算法是靠传递路由信息来实现的C.路由信息的矢量表示法是(目标网络,metric)D.使用距离矢量算法的协议只从自己的邻居获得信息正确答案:A解析:距离矢量路由算法是一种路由算法,该法在一个路由中重申跳数来寻找一个最短路径生成树。
距离矢量路由算法号召每个路由器在每次更新时发送它的整个路由表,但是仅仅发给它的邻居。
距离矢量路由算法倾向于路由循环,但是比链路状态路由算法更简单。
距离矢量路由协议中路由环路问题的解决方法如下:.定义最大值;.水平分割技术;.路由中毒;.反向路由中毒;.控制更新时间;.触发更新。
计算机网络中的路由算法
计算机网络中的路由算法路由算法在计算机网络中起着关键的作用,它用于确定数据包在网络中的传输路径。
根据不同的网络拓扑和需求,有多种不同的路由算法被应用。
本文将介绍几种常见的路由算法。
1. 距离矢量算法(Distance Vector Algorithm)距离矢量算法是一种分布式的路由算法,每个节点在路由表中记录到达目的节点的距离向量。
节点之间通过交换距离向量信息来更新路由表,并且通过Bellman-Ford算法来计算最短路径。
该算法简单易实现,但是在大型网络中容易产生计数到无穷大的问题,即由于链路故障等原因产生的无限循环。
2. 链路状态算法(Link State Algorithm)链路状态算法是一种集中式的路由算法,每个节点都会收集与自身相连的链路状态信息,并通过最短路径算法(如Dijkstra算法)计算出到达其他节点的最短路径。
然后,每个节点都将自己的链路状态信息广播给所有其他节点,使得每个节点都有完整的网络拓扑和链路状态信息。
该算法需要节点之间频繁的广播和计算,但是能够保证收敛,即要么找到最短路径,要么不进行路由。
3. 路径向量算法(Path Vector Algorithm)路径向量算法可以看作是距离矢量算法和链路状态算法的结合,它通过回退进行路径检测和避免计数到无穷大的问题。
每个节点在路由表中记录到达目的节点的路径和向量信息,通过交换路径向量信息来更新路由表。
在计算最短路径时,路径向量算法使用类似链路状态算法的Dijkstra算法,但是在寻找路径时,会检查前面的节点是否已经在路径中出现,以避免产生环路。
4. 队列距离矢量算法(Queue Distance Vector Algorithm)队列距离矢量算法是距离矢量算法的一种改进算法,主要解决计数到无穷大问题。
该算法引入了队列和计数器,通过计数器和链路状态信息来确定数据包是否进入队列。
每个节点在路由表中记录到达目的节点的距离向量和队列的长度。
距离矢量路由协议的Bellman
距离矢量路由协议的Bellman-Ford算法距离矢量路由协议(包括RIP RIP2 IGRP EIGRP)通常采用Bellman-Ford算法来确定最佳路径。
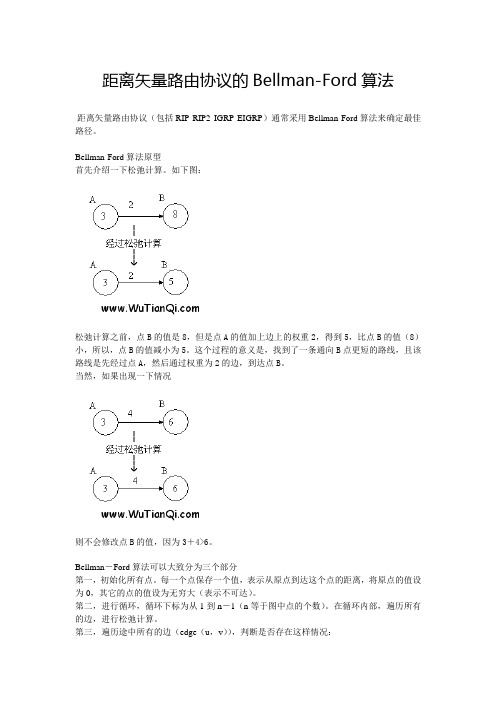
Bellman-Ford算法原型首先介绍一下松弛计算。
如下图:松弛计算之前,点B的值是8,但是点A的值加上边上的权重2,得到5,比点B的值(8)小,所以,点B的值减小为5。
这个过程的意义是,找到了一条通向B点更短的路线,且该路线是先经过点A,然后通过权重为2的边,到达点B。
当然,如果出现一下情况则不会修改点B的值,因为3+4>6。
Bellman-Ford算法可以大致分为三个部分第一,初始化所有点。
每一个点保存一个值,表示从原点到达这个点的距离,将原点的值设为0,其它的点的值设为无穷大(表示不可达)。
第二,进行循环,循环下标为从1到n-1(n等于图中点的个数)。
在循环内部,遍历所有的边,进行松弛计算。
第三,遍历途中所有的边(edge(u,v)),判断是否存在这样情况:d(v)> d (u) + w(u,v)则返回false,表示途中存在从源点可达的权为负的回路。
之所以需要第三部分的原因,是因为,如果存在从源点可达的权为负的回路。
则应为无法收敛而导致不能求出最短路径。
考虑如下的图:经过第一次遍历后,点B的值变为5,点C的值变为8,这时,注意权重为-10的边,这条边的存在,导致点A的值变为-2。
(8+-10=-2)第二次遍历后,点B的值变为3,点C变为6,点A变为-4。
正是因为有一条负边在回路中,导致每次遍历后,各个点的值不断变小。
在回过来看一下bellman-ford算法的第三部分,遍历所有边,检查是否存在d(v) > d (u) + w(u,v)。
因为第二部分循环的次数是定长的,所以如果存在无法收敛的情况,则肯定能够在第三部分中检查出来。
比如此时,点A的值为-2,点B的值为5,边AB的权重为5,5 > -2 + 5. 检查出来这条边没有收敛。
计算机网络原理 距离矢量路由
计算机网络原理距离矢量路由距离矢量路由选择(Distance Vector Routing)算法是通过每个路由器维护一张表(即一个矢量)来实现的,该表中列出了到达每一个目标地的可知的最短路径及所经过的线路,这些信息通过相邻路由器间交换信息来更新完成。
我们称这张表为路由表,表中按进入子网的节点索引,每个表项包含两个部分,到达目的地最优路径所使用的出线及一个估计的距离或时间,所使用的度量可能是站段数,时间延迟,沿着路径的排队报数或其他。
距离矢量路由选择算法有时候也称为分布式Bellman-Ford路由选择算法和Ford-Fulkerson算法,它们都是根据其开发者的名字来命名的(Bellman,1957;Ford and Fulkerson,1962)。
它最初用于ARPANET路由选择算法,还用于Internet和早期版本的DECnet 和Novell的IPX中,其名字为RIP。
AppleTalk t Cisco路由器使用了改进型的距离矢量协议。
在距离矢量路由选择算法中,每个路由器维护了一张子网中每一个以其他路由器为索引的路由选择表,并且每个路由器对应一个表项。
该表项包含两部分:为了到达该目标路由器而首选使用的输出线路,以及到达该目标路由器的时间估计值或者距离估计值。
所使用的度量可能是站点数,或者是以毫秒计算的延迟,或者是沿着该路径排队的分组数目,或者其他类似的值。
假设路由器知道它到每个相邻路由器的“距离”。
如果所用的度量为站点,那么该距离就为一个站点。
如果所用的度量为队列长度,那么路由器只需检查每一个队列即可。
如果度量值为延迟,则路由器可以直接发送一个特殊的“响应”(ECHO)分组来测出延时,接收者只对它加上时间标记后就尽快送回。
距离矢量路由算法
距离矢量路由算法(Distance Vector Routing,DV)是ARPANET网络上最早使用的路由算法,也称Bellman-Ford路由算法和Ford-Fulkerson算法,主要在RIP(Route Information Protocol)协议中使用。
Cisco的IGRP和EIGRP路由协议也是采用DV这种路由算法的。
“距离矢量路由算法”的基本思想如下:每个路由器维护一个距离矢量(通常是以延时是作变量的)表,然后通过相邻路由器之间的距离矢量通告进行距离矢量表的更新。
每个距离矢量表项包括两部分:到达目的结点的最佳输出线路,和到达目的结点所需时间或距离,通信子网中的其它每个路由器在表中占据一个表项,并作为该表项的索引。
每隔一段时间,路由器会向所有邻居结点发送它到每个目的结点的距离表,同时它也接收每个邻居结点发来的距离表。
这样以此类推,经过一段时间后便可将网络中各路由器所获得的距离矢量信息在各路由器上统一起来,这样各路由器只需要查看这个距离矢量表就可以为不同来源分组找到一条最佳的路由。
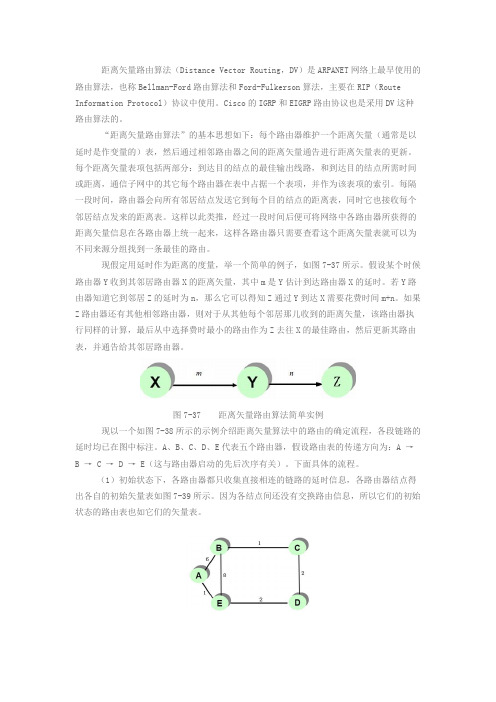
现假定用延时作为距离的度量,举一个简单的例子,如图7-37所示。
假设某个时候路由器Y收到其邻居路由器X的距离矢量,其中m是Y估计到达路由器X的延时。
若Y路由器知道它到邻居Z的延时为n,那么它可以得知Z通过Y到达X需要花费时间m+n。
如果Z路由器还有其他相邻路由器,则对于从其他每个邻居那儿收到的距离矢量,该路由器执行同样的计算,最后从中选择费时最小的路由作为Z去往X的最佳路由,然后更新其路由表,并通告给其邻居路由器。
图7-37 距离矢量路由算法简单实例现以一个如图7-38所示的示例介绍距离矢量算法中的路由的确定流程,各段链路的延时均已在图中标注。
A、B、C、D、E代表五个路由器,假设路由表的传递方向为:A → B →C → D → E(这与路由器启动的先后次序有关)。
下面具体的流程。
(1)初始状态下,各路由器都只收集直接相连的链路的延时信息,各路由器结点得出各自的初始矢量表如图7-39所示。
物联网中的动态路由算法
物联网中的动态路由算法近年来,随着物联网技术的飞速发展,越来越多的智能设备进入我们的生活中。
这些设备之间需要进行通信,而要实现这样的通信,就需要迅速、高效地找到一条合适的通信路径。
在物联网中,动态路由算法被广泛应用,它可以实现网络的自适应、优化和可靠性。
本文将介绍物联网中常用的动态路由算法及其优缺点。
一、物联网中的路由算法在物联网中,路由算法的主要任务是找到一条最佳的路径,让信息尽快地传输到目的地。
传统的路由算法有基于离散事件的模拟技术(DES)、最短路径算法(SPF)和最小成本路由算法等。
但这些传统算法并不适用于物联网。
物联网通常涉及大量的设备和节点,这个网络是分布式的、动态的,并且节点具有不可预测的移动性。
因此,物联网中的路由算法必须是动态的、自适应的、具有负载均衡和容错能力的。
为此,物联网中采用了一些适用于动态环境下的路由算法,常用的有以下几种。
二、基于距离矢量的路由算法基于距离矢量的路由算法(Distance Vector Routing Protocol,DVRP)是一种基于链路状态的路由算法,其主要思想是每个节点维护到其他节点的距离信息,通过比较每个节点距离其它节点的距离,寻找到一条最短路径。
这种算法的优势在于其简单易实现、抗噪声和抗故障能力强。
但它的缺点也很明显,如容易出现环路、收敛速度慢等。
但在小型的物联网中,这种算法仍然是一个不错的选择。
三、基于链路状态的路由算法在物联网中,基于链路状态的路由算法(Link State Routing Protocol,LSRP)也被广泛应用。
该算法要求每个节点通过广播自己的链路状态信息,以构建整个网络图,然后计算每个节点到达其他节点的最短路径。
这种算法的优点在于其收敛速度快、计算准确性高,但缺点也很明显,如通信效率低下、节点存储和计算负载大等。
四、基于蚁群算法的路由算法基于蚁群算法的路由算法是指模拟蚂蚁寻找食物的行为来寻找网络中最短的路径,它具有自组织、分布式、容错、自适应等特点,可以有效地处理动态和复杂的网络环境。
路由器转发算法带例题
路由器转发算法带例题路由器转发算法是指在计算机网络中,路由器根据接收到的数据包的目的地址,决定将数据包转发到哪个出口端口的算法。
它是网络中的关键技术之一,能够实现网络中数据的快速、准确传输。
常见的路由器转发算法有以下几种:1. 静态路由算法:静态路由算法是指管理员手动配置路由器的路由表,将目的地址与出口端口的对应关系预先设定好。
当路由器接收到数据包时,根据目的地址查找路由表,找到对应的出口端口进行转发。
例如,假设路由器的路由表如下:目的地址出口端口192.168.1.0 1192.168.2.0 2当路由器接收到一个目的地址为192.168.1.100的数据包时,根据路由表可以得知该数据包需要通过出口端口1进行转发。
2. 动态路由算法:动态路由算法是指路由器通过与相邻路由器交换路由信息,自动学习网络拓扑和最优路径,并更新自己的路由表。
常见的动态路由算法有距离矢量路由算法(Distance Vector Routing)和链路状态路由算法(Link State Routing)。
距离矢量路由算法中,路由器通过周期性地交换路由表信息,计算到达目的地址的最短路径。
每个路由器根据相邻路由器发送过来的路由表信息,更新自己的路由表。
链路状态路由算法中,路由器通过交换链路状态信息,计算网络中的最短路径树。
每个路由器根据收集到的链路状态信息,计算出到达目的地址的最短路径,并更新自己的路由表。
3. 自适应路由算法:自适应路由算法是指路由器根据网络拥塞情况和链路质量动态调整路由选择。
常见的自适应路由算法有最小带宽算法、最短延迟算法和最小负载算法等。
最小带宽算法中,路由器根据链路的带宽情况选择最大带宽的路径进行转发。
最短延迟算法中,路由器根据链路的延迟情况选择最短延迟的路径进行转发。
最小负载算法中,路由器根据链路的负载情况选择负载最小的路径进行转发。
总结起来,路由器转发算法根据不同的需求和网络情况,选择合适的算法来实现数据包的转发。
距离矢量路由算法
距离矢量路由算法距离矢量路由算法是一种常用的路由协议算法,用于在一张网络拓扑图中计算一个节点到其它节点的最短路径,从而实现数据包的转发和路由选择。
本文将详细介绍距离矢量路由算法的原理、实现和优化方法。
一、距离矢量路由算法原理距离矢量路由算法是一种分布式算法,它的核心思想是每个节点通过交换路由信息来建立一个网络的路由表,并根据这张表来进行数据包的转发。
在距离矢量路由算法中,每个节点都会维护一个距离向量,它表示从当前节点到其它节点的距离。
距离向量包含三部分信息:到达某个节点的距离、中转节点和前缀信息。
其中,到达某个节点的距离可以采用最小跳数、带权重的跳数或延迟时间等方式来衡量。
在距离矢量路由算法中,每个节点都会周期性地向邻居节点广播自己的距离向量,并接收邻居节点的距离向量。
通过比较邻居节点的距离向量和自己的距离向量来更新自己的路由表。
如果邻居节点的距离更小,则更新路由表;如果邻居节点的距离更大,则不做任何操作。
这样,所有的节点都会逐步收敛到一个稳定状态,每个节点的路由表也会被更新成最优路由。
二、距离矢量路由算法实现距离矢量路由算法的实现通常可以分为两个阶段:初始化和更新。
在初始化阶段,每个节点都会初始化自己的距离向量和路由表,并向邻居节点发送距离向量。
在更新阶段,每个节点会周期性地接收邻居节点的距离向量,比较并更新自己的路由表,然后向邻居节点发送自己的距离向量。
具体实现的过程如下:1. 初始化阶段:(1)每个节点都向其它节点广播自己的距离向量,并保存邻居节点的距离向量。
(2)每个节点都根据邻居节点的距离向量更新自己的路由表,并确定最短路径。
2. 更新阶段:(1)每个节点周期性地向邻居节点发送自己的距离向量。
(2)每个节点周期性地接收邻居节点的距离向量,并比较以更新自己的路由表。
(3)如果某个节点的距离向量发生了变化,则它会向其它节点广播自己的距离向量。
三、距离矢量路由算法优化距离矢量路由算法是一种简单有效的路由协议算法,但也存在一些问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
打开WF,刷新路由表,设置程序中的网络结构和距离矢量的值,路由表更新,打开DL,点击启动对路由表刷新,改变网路拓扑刷新路由表验证网路路由功能,修改线路延迟,刷新路由表,由路由1转发给路由3,路程为从1到2到4到3。
2、多机模拟实验:
手动刷新路由表直到表不在变化
左上角的路由器向远程2发送:from 6667:
右上角的路由器向远程3发送数据from 6668:
修改线路参数并更新路由表:
左上角的路由器再次向远程2发送:from 6667:
修改线路参数并更新路由表:
右上角的路由器再次向远程3发送数据from 6668:
2、数据处理1)计算示例
3、实验心得。