Micro-Hite测高仪+POWER PANEL操作手册(V4)-1
Micro-Hite测高仪+POWER PANEL操作手册
2. 开启电源:
3. 测头通过补偿点后出现: 4. 启动电感测头:
5. 电感测头测量位置:
用手将测头内推 到底便进入垂直 度测量功能
测量高度
6. 启动垂直度测量:
按下功能按键
屏幕显示
第7页
7. IG-13 测量执行:
操作手册
TESA MICRO-HITE
8. 结束测量及显示测量结果:
IG-13 测头最快移动速度≤20mm/s 按下功能按键
2.4 文件管理
中心线对中心线的分类级别 好 / 拒绝
在孔内找极值点得到的测量值 在轴上找极值点得到的测量值 配置触测点
确定配置结果并返回主菜单
检查文件 可以打开文件并改变公差带
第 34 页
操作手册
TESA MICRO-HITE
退出检查模式 分步显示程序
自动检查程序
删除文件 “可以从 RAM 中删除 .DAT, .RES, .STA 文件或从 MEMORY 卡中删 除 .DAT 文件”
退出“在 1 个坐标轴内 测量程序”模式
2、测量程序编辑中的主要符号和他们的意义
第 32 页
2.1 测头常数
操作手册
TESA MICRO-HITE
改变校验块的尺寸 每次测量后输入测头常数
2.2 建立参考点
编辑程序时设定测头常数
“PRESET”功能 找孔的顶点设定参考点 编辑测量程序时设定参考点
每测完一个工件确定新参考点 找轴的顶点设定参考点
六、预设归零:按 键
1. 输入默认值后,按 ENTER 键。 2. 使用驱动轮触测基准点即可完成预设。
七、自动测圆模式:
第5页
操作手册
TESA MICRO-HITE
瑞士TESA MICRO-HITE 900测高仪
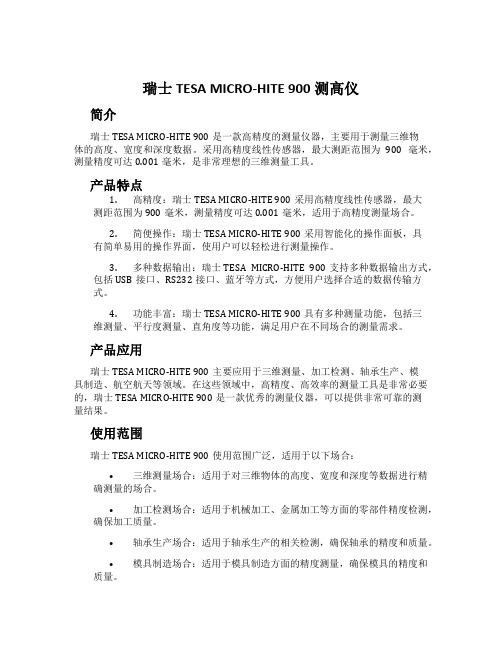
瑞士TESA MICRO-HITE 900测高仪简介瑞士TESA MICRO-HITE 900是一款高精度的测量仪器,主要用于测量三维物体的高度、宽度和深度数据。
采用高精度线性传感器,最大测距范围为900毫米,测量精度可达0.001毫米,是非常理想的三维测量工具。
产品特点1.高精度:瑞士TESA MICRO-HITE 900采用高精度线性传感器,最大测距范围为900毫米,测量精度可达0.001毫米,适用于高精度测量场合。
2.简便操作:瑞士TESA MICRO-HITE 900采用智能化的操作面板,具有简单易用的操作界面,使用户可以轻松进行测量操作。
3.多种数据输出:瑞士TESA MICRO-HITE 900支持多种数据输出方式,包括USB接口、RS232接口、蓝牙等方式,方便用户选择合适的数据传输方式。
4.功能丰富:瑞士TESA MICRO-HITE 900具有多种测量功能,包括三维测量、平行度测量、直角度等功能,满足用户在不同场合的测量需求。
产品应用瑞士TESA MICRO-HITE 900主要应用于三维测量、加工检测、轴承生产、模具制造、航空航天等领域。
在这些领域中,高精度、高效率的测量工具是非常必要的,瑞士TESA MICRO-HITE 900是一款优秀的测量仪器,可以提供非常可靠的测量结果。
使用范围瑞士TESA MICRO-HITE 900使用范围广泛,适用于以下场合:•三维测量场合:适用于对三维物体的高度、宽度和深度等数据进行精确测量的场合。
•加工检测场合:适用于机械加工、金属加工等方面的零部件精度检测,确保加工质量。
•轴承生产场合:适用于轴承生产的相关检测,确保轴承的精度和质量。
•模具制造场合:适用于模具制造方面的精度测量,确保模具的精度和质量。
•航空航天场合:适用于航空航天领域中的相关测量,确保产品的精度和质量。
维护保养瑞士TESA MICRO-HITE 900在使用过程中需要进行定期的维护和保养,以保证其正常运转和使用寿命。
Vertex IV测高测距仪使用说明

数据通过红外线或蓝牙传输(可选),结果可以保存,也可以通过专业数字测径尺、 个人电脑或掌上电脑处理。
举例:你包内的温度为 15℃/59F,外界空气温度为-5℃/23F,你取出仪器直接测量的话, 测量结果就会显示是 10.40m/34.00ft,而不是正确的 10.00m/32.80ft。
因此在校准时如果达不到温度平衡,这个测量误差就会长期带入到你的测量工作,直 到你下次按照正确的方法校准。
-定期检查设备并在需要的情况下重新校准。 -不要触摸以前前端的温度传感器(视镜和喇叭间的金属突)。 -在没有达到周围环境温度之前不要进行校准。 -在进行高度测量时,尽可能地保持仪器垂直于水平面。 三角函数法计算高度基于两个角和距离,距离可以用带尺手动测量,也可以通过 T3 异 频雷达发射器测量。如果采用带尺手动测量,应该在角度和高度测量之前将距离输入到仪 器中。
与测量带尺和激光类仪器不同的是,Vertex IV采用的是超声波来测量距离,可以用在 没有参考点的测量,超声波在遇到障碍物时不会穿过它,而是会在障碍物周围寻求最短的 路径。
高度测量是通过角度和距离测量中的参数通过三角函数计算出的,Vertex IV默认为测 量物体是垂直于地面的。
Vertex IV对于每个目标都会有无数个测量结果,设备每次会显示同一目标的最后4个测 量高度。
校准 用一个测量带尺在 Vertex IV 和 T3 之间精确地测量 10 米的距离(32.8 英尺),机器和
100190测量部件不能开始低电量电池放置错误更换电池将电池正确放置异频雷达收发机不能开始低电量更换电池没有测量结果出现异频雷达收发机关闭异频雷达收发机电量低环境噪音影响太大异频雷达收发机类型错误与测量目标间角度太大设备没有固定没有水平参比开启异频雷达收发机更换电池在其它样点测量更换异频雷达收发机类型增加与测量目标间的距离将设备固定牢固小心摇动测量头错误不符合实际的数据环境噪音影响太大设备没有固定在其它样点测量将设备固定牢固快速启动向导使用异频雷达收发机测量高度直到交叉瞄准线消失重复以上操作进入下一个测量在没有异频雷达收发机条件下测量高度键显示height显示mdist手动测量如果数值错误按箭头键修改如果正确直接使用直到交叉瞄准线消失重复以上操作进入下一个测量水平测量高度显示height显示mdist手动测量如果数值错误按箭头键修改如果正确直接使用再按直到交叉瞄准线消失重复以上操作进入下一个测量角度测量开启vertexiv并使用箭头键直到出现angle直到交叉瞄准线消失距离测量dme按左箭头键并读数httpemail
高度仪用户使用手册

高度仪用户使用手册,方便大家了!
Inspechite 北京大英诚业科技有限公司
Inspechite 高度测量仪用户手册
序言
Inspechite 高度仪是一种高精度的高度测量仪器。
该仪器按精度有两种不同的型号(每一型号有多种规格可测高度)。
详情参阅规格说明。
? Inspechite 精密型(400mm, 700mm)
该高度仪主要由测量主机与控制单元(EL50)组成,可以进行一维测量。
测量操作规定在10℃~40℃的环境中进行。
为能得到最佳的测量精度,建议把环境温度调控在20℃,因为校准块规的尺寸是在20℃的条件下标定的。
内置空气压缩机和经淬硬和研磨的高质量不锈钢空气轴承可以帮助仪器毫不费力地下在花岗岩平台上平稳移动。
仪器所带标准测头为Φ4×55mm(碳钢测球)。
手轮转动提供较为精确的运动控制,微调旋钮提供测头的精细动作,通过不同的转动方向实现测头的上下运动。
警示:在测量过程中一定要使用手轮控制,否则可能造成测头损坏。
控制单元配有可调式连接。
操作者可以根据自己的需要将控制面板调节到合适的角度。
包有软垫的把手可以轻松握住和移动仪器。
为易于操作设计时已尽可能给于考虑。
实际测量在1牛顿的恒力下进行。
测量力允差保持在+/-0.2牛顿。
该仪器由可充电电池驱动。
如果电池没有电,AC适配器为其提供充电。
充电时间约6--8小时取决于电池起充时的电量。
电池可以工作约8小时。
在无电池的情况下仪器仍可依靠AC适配器进行工作。
多功能电容屏自动测试系统_使用说明书

2
软件界面介绍 ....................................................................................................................................... 6 2.1 2.2 2.3 2.4 主界面 ....................................................................................................................................... 6 坐标相关演示 ........................................................................................................................... 9 采样数据分析 ......................................................................................................................... 13 系统工具条功能介绍 ............................................................................................................. 17 2.4.1 选项设置...................................................................................................................... 17 2.4.2 启动测试和停止测试.................................................................................................. 22 2.4.3 坐标方向校正.............................................................................................................. 22 2.4.4 坐标数据源选择.......................................................................................................... 23 2.4.5 获取配置和发送配置.................................................................................................. 23 2.4.6 手动截图...................................................................................................................... 24 2.4.7 版本显示及获取.......................................................................................................... 24............................................................................................................................ 25 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 3.12 精确度测试(含自定义测试点功能) ................................................................................. 26 抖动度测试(含自定义测试点功能) ................................................................................. 27 横向线性度测试 ..................................................................................................................... 28 纵向线性度测试 ..................................................................................................................... 29 对角线线性度测试 ................................................................................................................. 30 正斜向线性度测试 ................................................................................................................. 31 反斜向线性度测试 ................................................................................................................. 32 自定义线性度测试 ................................................................................................................. 33 灵敏度测试 ............................................................................................................................. 34 整机画线测试 ......................................................................................................................... 35 边框画线测试 ......................................................................................................................... 36 压力测试(负荷测试) ......................................................................................................... 37
美高立多功能电力仪表-用户手册
7.3 模拟量变送输出............................................................................................................... 26
8 维护与故障排除..........................................................................................................................29
<20mΩ
45~65Hz
AC/DC:80V~270V
<4VA
2 路脉冲输出,常数:5000 或 20000imp/kWh(kvarh) 最多 1 路 RS-485 通讯,Modbus-RTU 协议,波特率:2400~ 1最9多2040b路p开s 关量输入,干结点方式
4 面板说明与测量信息显示............................................................................................................. 6 4.1 LED 数码管显示................................................................................................................. 6 4.2 LCD 液晶显示..................................................................................................................... 8
英士测高仪说明书
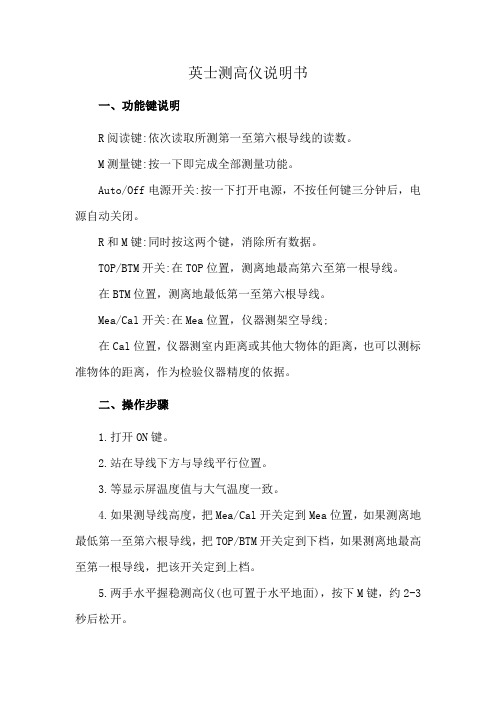
英士测高仪说明书一、功能键说明R阅读键:依次读取所测第一至第六根导线的读数。
M测量键:按一下即完成全部测量功能。
Auto/Off电源开关:按一下打开电源,不按任何键三分钟后,电源自动关闭。
R和M键:同时按这两个键,消除所有数据。
TOP/BTM开关:在TOP位置,测离地最高第六至第一根导线。
在BTM位置,测离地最低第一至第六根导线。
Mea/Cal开关:在Mea位置,仪器测架空导线;在Cal位置,仪器测室内距离或其他大物体的距离,也可以测标准物体的距离,作为检验仪器精度的依据。
二、操作步骤1.打开ON键。
2.站在导线下方与导线平行位置。
3.等显示屏温度值与大气温度一致。
4.如果测导线高度,把Mea/Cal开关定到Mea位置,如果测离地最低第一至第六根导线,把TOP/BTM开关定到下档,如果测离地最高至第一根导线,把该开关定到上档。
5.两手水平握稳测高仪(也可置于水平地面),按下M键,约2-3秒后松开。
6.按R即显示测量值。
如TOP/BTM开关在下档,显示屏按顺序显示离地最近的导线与仪器底部的距离,第一根线与第二根线的距离,第三根线与第二根线的距离……如所测的导线数量不够六根,显示值为------。
如TOP/BTM开关在上档,显示屏按顺序显示离地最高的导线与仪器底部的距离,第六根导线与第五根导线的距离,第五根导线与第四根导线的距离(注:该值前面有“-”符号,表示负值),其余依次类推。
7.同时按R和M键,清除所有数据。
三、电池低电压报警和更换电池1.电池电压低于6V,仪器会自动报警,并在显示屏中间上方有显示。
用户应及时更换电池,否则测量值不准,电池漏液会严重损坏仪器。
2.电池盒在仪器左下方,滑开盖后,取出9V旧电池,注意极性,换上新电池,再盖上盖子。
四、其他注意事项1.CHM6000系列测高仪显示单位为公制,不需要英制/公制转换。
2.理论上讲,CHM6000仪器在大气温度摄氏20度时,测量范围3-30米。
高压测试仪操作规范_修正版

3.把被測零件放在測試架上,連接好地線,將高壓探頭放在被測試零件需測試位置(注:高壓探頭要拿穩)。
4.按“RESET”鍵進入準備測試狀態,按“FREQUENCY”鍵,選擇測試頻率(50/60HZ),最後按動“TEST”鍵,進入HI-POT測試。
8.測試完畢,關閉電源。(如測試中途有異常,請立即關電源,通知技術人員處理)。
4、注意事項:
1.操作高壓機位置必須有醒目“高壓危險”標示牌。
2.操作人員腳下必須墊絕緣膠皮,身體任何部位不可碰到其它金屬部分。
3.不管在任何情況下,操作人員離開高壓機時,必須立即關閉HI-POT電源。
核準
審核
制訂
5.測試完畢,儀器發出“笛”一聲響,機器LCD屏顯示“PASS”,則被測零件通過,如果機器長響,儀器LCD屏顯示“FAIL”則被測零件HI-POT不良。(注:可以從LCD顯示內容看出被測零件的不良之處。如:電流偏大、絕緣電阻不夠、內步拉弧等)。
6.將良品放回包裝箱;不良品貼上不良標簽並分開放置。
7.按“RESET”鍵可進入下一個零件測試。
翰廷電子科技(東莞)有限公司
文件名稱:
高壓測試儀操作規范
文件編
2.0
頁次:
1/1
1、目的:為了確保使用高壓儀能準確測試及保証使用安全。
2、權責:必須由指定的操作人員操作。
3、操作步驟:
1.打開高壓機電源鍵,機器自檢OK“笛”一聲響,機器自動返回到上次測試的程序。
2. 根據被測零件規格要求,按“RECALL/BACK”鍵,進入程序呼入呼出模式再用“ ”
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TESA MICRO-HITE测高仪操作手册主体、power panel控制面板一、外观说明:测高仪上盖防尘皮带测臂固定钮IG13连接线接孔测臂测针power panel控制面板电感测头以及测圆功能电源开关驱动轮固定钮测头驱动轮气源开关平移支撑点二、符号功能说明:测量模式1、在同一个方向上进行长度测量,无须考虑测头直径。
测量模式2、在上下方向上进行长度测量,要考虑测头直径。
连续显示模式功能。
显示直径数值、显示两次触测之间的距离。
上两显示值的差值。
重新归零、重设参考基准点。
两次触测、触测两次所得平均值。
单次触测、触测单次所得到的数值。
系统、各项设定参数更改。
预设功能键。
更改标准校验块的尺寸。
显示垂直度误差值。
显示垂直度误差上限值。
显示垂直度误差下限值。
显示平行度误差值。
使用IG13时,显示角度键。
连续显示模式下的归零键。
退出模式三(连续显示)功能。
自动输出测量数据。
公英制转换键。
表头打印时,语言选择设定键。
确定输入ENTER键。
显示向上。
显示向下。
数字向左切换。
数字向右切换。
三、单向测量功能操作:新基准点开机后,按F1 键(不考虑测头直径) 1.开机之后出现此画面:2.测头移动向下通过补偿点3.按F1进入此画面4.选择并使用驱动轮触测零点完成以上步骤便可开始执行单方向测量四、双向测量功能操作:1.打开电源开关后,2.移动测头使其通过补偿点3.将测针放入标准校验块中,上下上下触测后进入,此时测高仪已经完成测针直径测量并将补偿进后续测量。
4.注:测针于补偿过程中,如果上下两次触测的误差值为1~5um时,小数点位数会自动变更为0.001mm。
如果误差值为5~10um时,小数点位数会自动变更为0.01mm。
如果误差值为10~50um 时,小数点位数会自动变更为0.1mm 。
如果误差值大于50um 时,小数点位数会自动变更为1mm 。
※标准校验块校正方式:4. 选择零点后,连续触测两次归零五、归零设定:按F2键1. 向下归零:使用驱动轮向下触测两次零点即可。
2. 向上归零:使用驱动轮向上触测两次零点即可。
3. 沟槽中心归零:使用驱动轮在沟槽上下各触测一次即可。
4. 圆孔中心归零:使用驱动轮在圆孔内上下各触测一次即可。
六、预设归零:按键1. 输入默认值后,按ENTER 键。
2. 使用驱动轮触测基准点即可完成预设。
七、自动测圆模式:可以上也可上上下下来触测新基准点 新基准点1.测针触测工件后,继续旋转驱动轮直到LED的绿灯亮为止。
2.将驱动轮固定钮向右旋紧。
(此时出现上下两个黄灯、中间一个绿灯)3.微旋驱动轮使绿灯位于两个黄灯的中间。
4.将工件平推,使得测针通过圆弧的极点后,测高仪会自动记忆此点位置。
5.相反的方向再将上述的步骤执行一次,取得另一方向的极点位置。
6.松开驱动轮,显示数值为圆心高度;按键,便可得出圆孔的直径数值。
功能按键驱动轮固定钮锁紧松开注:测轴时,旋紧驱动轮固定钮后须按一下功能按键;测高仪按测轴寻找极值。
八、手动测圆模式:1. 测针触测工件后,继续旋转驱动轮直到LED的绿灯亮为止。
2. 将驱动轮固定钮向右旋紧。
(此时出现上下两个黄灯、中间一个绿灯)3. 调整旋转驱动轮使绿灯位于两个黄灯的中间。
4. 功能按键按两下(测轴时,功能按键按三下)。
5. 将工件左右移动两次。
6. 此时测高仪的LED灯号全亮,在移动工件让灯号只剩下最低的一个(圆孔最低点)7. 使用驱动轮上下各触测一下。
8 . 松开驱动轮,按键,便可测量出圆孔的直径数值。
九、连续显示模式:1.启动连续显示模式:按键2.退出连续显示模式:再按一次即可退出。
十、测量模式四:垂直度测量(需搭配IG-13电感测头时使用)1.在关机状态下,将IG-13电感测头安装到测高仪后再将测高仪电源开启。
2.开启电源:3.测头通过补偿点后出现:4.启动电感测头:5.电感测头测量位置:6.启动垂直度测量:用手将测头内推到底便进入垂直度测量功能测量高度按下功能按键屏幕显示7. IG-13测量执行:8. 结束测量及显示测量结果:9. 查看测量结果:直线度夹角IG-13测头最快移动速度≤20mm/s 按下功能按键显示测量结果测量起始点Z轴测量结束点垂直度误差(ISO1101)直线回归线相对于直线度的偏差10. 再重新回到测量起始点:11. 查看测量结果:十一、系统功能设定:按键来进入系统的各项设定。
1. 单位设定:2. 间设定:3. 传输设定:按下功能按键操作手册第10页TESA MICRO-HITE4. 表头设定:5. 蜂鸣器设定:可以开启或是关闭蜂鸣器。
十二、在一个坐标轴方向的测量程序: 1. 在一个坐标轴方向测量程序的编辑M01、M02、M04和M05是按IT12的公差来选取的步骤 操作 显示TESA MICRO-HITE 作好测量准备1或2坐标轴内的测量操作手册第11页TESA MICRO-HITE调用“在1或2坐标轴内测量程序的编辑”按“在1个坐标轴内的测量程序”在1个坐标轴内编辑测量程序取文件名要求 “6个字符”确认文件名配置根据ISO 标准选择公差等级 可以进行配置:本例没有配置选择基本公差等级IT12备注:对于选取极限公差值的,没有必要选择基本公差等级操作手册第12页TESA MICRO-HITE测头常数用标准校验块确定测头常数设参考点在参考点触测两次M01配置 M01主菜单M01配置菜单配置M01输入M01的公称长度公差带的上下偏差按公差等级IT12自动进行确定 回到M01主菜单M02主菜单确定M01长度值操作手册第13页TESA MICRO-HITEM02的配置M02配置菜单配置M02确定M02公称长度通过查找顶点确定M02M03主菜单M03配置菜单配置M03 M03的配置确定M03公称长度操作手册第14页TESA MICRO-HITE输入M03上偏差输入M03下偏差按测内孔功能测M03按功能键得到M03返回到M03主菜单M04主菜单M04的配置M04配置菜单配置M04操作手册第15页TESA MICRO-HITE输入M04公称长度返回M04主菜单M05的配置M05主菜单M05配置菜单按功能键得到M04配置M05输入M05的公称长度操作手册第16页TESA MICRO-HITE选择单此功能测M05按测外圆功能测M05返回到M05主菜单触测得到M05结束“在1或2坐标轴内测量程序的编辑”在1个坐标轴方向测量程序编辑结束退出“在1个坐标轴内测量程序”模式操作手册第17页TESA MICRO-HITE2、测量程序编辑中的主要符号和他们的意义 2.1 测头常数改变校验块的尺寸 编辑程序时设定测头常数每次测量后输入测头常数 2.2 建立参考点“PRESRT ”功能 每测完一个工件确定新参考点找孔的顶点设定参考点 找轴的顶点设定参考点编辑测量程序时设定参考点2.3 主菜单操作手册第18页TESA MICRO-HITE确定一个新的测头常数 最后两次触测值之间差作为输入值确定新参考点 进入配置菜单最后两个值的差作为输入值 模拟触测点2.4 配置菜单选择不同的公差区域 中心线对中心线的分类级别好 / 拒绝单次触测得到的值 在孔内找极值点得到的测量值两次触测得到的值 在轴上找极值点得到的测量值内径尺寸的分级 配置触测点 再加工 / 好 / 拒绝外径尺寸的分级 确定配置结果并返回主菜单 再加工 / 好 / 拒绝2.4 文件管理操作手册第19页TESA MICRO-HITE检查文件 可以打开文件并改变公差带退出检查模式 自动检查程序分步显示程序删除文件“可以从RAM 中删除 .DAT, .RES, .STA 文件或从MEMORY 卡中删除 .DAT 文件”复制和传输文件“可以从RAM 中向MEMORY 卡中传输文件,反之亦然”复制文件 将文件从控制面板RAM 中 传输到MEMORY 卡中 将文件从MEMORY 卡中 文件从控制面板中直接将传输到控制面板RAM 中 传输到PC 中重要提示-- 不能将 .STA文件从控制面板RAM中传输到MEMORY卡中-- 不能将 .RES文件从MEMORY卡中传输到控制面板RAM中3、在一个坐标轴方向执行测量程序M01、M02、M04和M05是按IT12的公差来选取的步骤操作显示TESA MICRO-HITE做好测量准备在一个坐标轴方向执行测量程序调用“在1或2坐标轴内执行测量程序”打印测量值 生成“.STA ”统计文件只打印超差的测量值 生成“.RES ”结果文件打印工件的状态 好 / 再加工 / 拒绝在1或2坐标轴内执行测量程序调用“在1个坐标轴内执行测量程序”选择要执行的程序 根据图标选择功能在本例中不作选择 测头常数用标准块确定测头常数 参考 触测参考点两次“测量结束”终止当前工件的测量M01的测量触测点b、c得到M01 M02的测量触测M02的极值点M03的测量M03的值根据M02的值自动计算M04的距离M04的距离根据M02的值自动计算工件在公差范围内 开始测量下一个程序 工件不在公差范围内,但 取消被测工件的测量结果可补加工工件不在公差范围内,不能 退出“在1个坐标轴内执行通过 量程序”测量的统计数据(只有在“RES ”或“STA ”被链接 到测量程序M05的测量测量的结果测量一个新工件 调用功能“开始下一个工件的测量” 测量下一个工件调用功能“结束测量” 触测点f 得到M05十三、两维的测量:1、 Y 轴方向的测量结束测量:调用“结束测量”功能退出“在1个坐标轴内执行测量程序”模式 开机初始化并确定测头常数 触测参考点A 两次执行2D 功能确定高度Hy1: 测孔确定高度Hy3: (孔3)测量高度Hy3: (孔3)确定高度Hy6: (孔6)测量高度Hy6: (孔6)2、 X 轴方向的测量把工件翻转90度坐标轴由Y 到X 可以输由45°到135°的度、分、秒的值 确认工件的旋转角度确定高度Hx1: 测孔确定高度Hx3: 测孔3、 将坐标原点移到一个孔的中心确定高度Hx6: 测孔使用“检查”功能显示测量值 返回测量模式使用“设置原点”功能4、 将坐标轴旋转并过第二孔的中心将显示的主要值输出到打印机输出所有的测量值输入孔的序号 原点为B 点 显示孔3的坐标 使用“设置原点”功能5、 转换成极坐标值输入孔的序号 原点为B 点使用“对齐坐标轴”功能输入坐标轴需要经过的孔的序号使用“转换到极坐标”功能6、 移动坐标系查看孔6的坐标值返回到直角坐标系使用“扩展的几何功能”使用“移动坐标系”功能7、 创建虚拟点输入新的原点查看孔1的坐标值调用“坐标系零点设置”功能输入点的序号 (原点为B )使用“扩展的几何功能”使用“虚拟点”功能输入虚拟点的序号输入虚拟点的X 坐标值输入虚拟点的Y 坐标值检查虚拟点的坐标值8、 查看两位置之间的坐标间距使用“两位置之间的坐标间距”功能输入第一个位置的序号 P1输入第二个位置的序号 P2查看P1与P2之间间距9、 中断2D 的测量10、 计算拟和圆退出此功能返回几何功能主菜单 使用“st-2D ”功能终止2D 的测量测量孔2、4、6、7、8的X 、Y 坐标值及直径使用“拟合圆”功能输入参与拟合圆的孔的数量输入第一个孔的序号依次输入余下孔的序号测量孔2、4、6、7、8的X 、Y 坐标值及直径输入拟合圆的序号查看外接圆的直径查看内切圆的直径退出本功能11、 查询拟和圆的圆心坐标调用“设置坐标原点”功能 输入孔的序号 查询拟合圆圆心的坐标值12 TESA IG-13测头符合ISO 1101测量标准。