转向系统开发手册
RANGER MINI 2.0 用户手册说明书
RANGER MINI2.0用户手册RANGER MINI2.0User ManualRANGER MINI2.0使用开发手册RANGER MINI2.0User Manual在机器人第一次通电前,任何个人或者机构在使用设备之前必须阅读并理解这些信息。
有任何相关使用的疑问都可以联系我们*****************,必须遵守并执行本手册其他章节中的所有组装说明和指南,这一点非常重要。
应特别注意与警告标志相关的文本。
Before using the robot,any individual or organization must read and understand the manual.If you have any questions about it,please do not hesitate to contact us at*****************.It is very important that you should follow and implement all instructions and guidelines in this manual.Please pay extra attention to the warnings.重要安全信息Important Safety Information本手册中的信息不包含设计、安装和操作一个完整的机器人应用,也不包含所有可能对这一完整的系统的安全造成影响的周边设备。
该完整的系统的设计和使用需符合该机器人安装所在国的标准和规范中确立的安全要求。
This manual does not cover the design,installation,and operation of a robotic application,nor does it include any equipment that may affect the safety of a robotic system.A robot system that uses the RANGER MINI2.0should be designed and used in compliance with the safety requirements and other standards of the corresponding countries.RANGER的集成商和终端客户有责任确保遵循相关国家的切实可行的法律法规,确保完整的机器人应用实例中不存在任何重大危险。
基于RH850P1x的电动助力转向系统设计
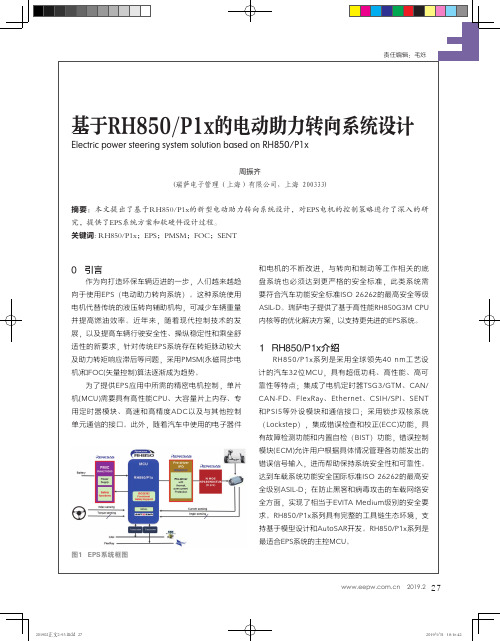
图1 EPS系统框图
2 系统设计
EPS系统如图1所示,包含以下。
A、电源管理部分:提供EPS系统所需要的各种电压,并能实现自我诊断和保护,提供对MCU的外部看门狗监控、SPI通信等;
B、传感器部分:采集电机的位置和电流等信号,电池电压等;
C、通信部分:包括CAN、SENT、SPI等,获取方向盘扭矩、车速等信息;
D、MCU控制部分:根据扭矩信号和车辆的状态,控制EPS助力策略;的PWM输出信号;
D、ENCA编码器:ENCA
信号,获得电机的位置;
E、TPBA定时器模式缓冲器
器的激励信号。
关于电机位置/转速信号的获取
多种方式:如果使用旋变编码器来检测电机位置以使用TPBA产生旋变编码器的激励信号
样返回的Sin和Cos信号,
信息;如果使用增量式编码器时
图2 EPS电机控制框图
图3 EPS软件控制框图
ELECTRONIC ENGINEERING & PRODUCT WORLD2019.2
严刚(1984-),男,嵌入式研发工程师,主要研究方向:智能家用电器基础技术研究及产品应用。
51
2019.2。
转向系统设计计算报告
目录1.系统概述........................................... 错误!未定义书签。
系统设计说明.................................... 错误!未定义书签。
系统结构及组成.................................. 错误!未定义书签。
系统设计原理及规范.............................. 错误!未定义书签。
2.输入条件........................................... 错误!未定义书签。
标杆车基本参数.................................. 错误!未定义书签。
LF7133确定的整车参数........................... 错误!未定义书签。
3.系统计算及验证..................................... 错误!未定义书签。
方向盘转动圈数.................................. 错误!未定义书签。
齿轮齿条式转向系的角传动比...................... 错误!未定义书签。
车轮实际最大转角................................ 错误!未定义书签。
静态原地转向阻力矩.............................. 错误!未定义书签。
静态原地转向时作用于转向盘的力.................. 错误!未定义书签。
最小转弯半径的校核.............................. 错误!未定义书签。
4.总结............................................... 错误!未定义书签。
参考文献.............................................. 错误!未定义书签。
2019年新版FMEA手册(中文版)

2019年新版FMEA⼿册(中⽂版)FMEA ⼿册(中⽂版)1引⾔ (1)1.1⽬的和说明 (1)1.2FMEA 的⽬标和限制 (2)1.3企业FMEA 整合 (2)1.4产品和过程FMEA (4)1.5项⽬规划 (7)1.6FMEA ⽅法 (11)2设计FMEA 的执⾏ (12)2.1步骤⼀:规划和准备 (12)2.2步骤⼆:结构分析 (14)2.3步骤三:功能分析 (18)2.4步骤四:失效分析 (24)2.5步骤五:风险分析 (30)2.6步骤六:优化 (41)2.7步骤七:结果⽂件化 (43)3过程FMEA(P-FMEA)的执⾏ (45)3.1步骤⼀:规划与准备 (45)3.2步骤⼆:结构分析 (48)3.3步骤三:功能分析 (51)3.4步骤四:失效分析 (55)3.5步骤五:风险分析 (63)3.6步骤六:优化 (72)3.7步骤七:结果⽂件化 (75)4监视及系统响应的补充F MEA(FMEA-MSR) (77)4.1步骤⼀:规划和准备 (78)4.2步骤⼆;结构分新 (80)4.3步骤三:功能分析 (81)4.4步骤四:失效分析 (83)4.5步骤五:风险分析 (86)4.6步骤六:优化 (94)4.7步骤七:结果⽂件化 (96)5本版的新增内容 (98)5.1特殊特性 (98)5.2FMEA 和功能安全 (98)5.3本版的D FMEA 变更 (100)5.4本版的PFMEA 变更 (103)6 词汇表 (107)1引⾔本联合出版物是美国汽车⼯业⾏动集团(AIAG)与德国汽车⼯业联合会(VDA)的整车⼚(OEM)和⼀级供应商成员合作逾三年的成果。
本⼿册已进⾏改写,并在⼏个关键领域对 FMEA ⽅法进⾏了修订。
其⽬的是为这些组织所代表的汽车⾏业提供FMEA 通⽤基础知识。
尽管我们尽了最⼤努⼒以达成共识,但可能仍有必要参考特定公司的出版物或顾客特定要求(CSR)。
⼀种新⽅法:本⼿册增加⼀个新的 FMEA 类别,即监视及系统响应 FMEA (FMEA-MSR)。
2012年奥迪A8L、S8、混合动力(hybrid)用户使用手册

使用说明书奥迪 A8 | S8AudiVorsprung durch Technik奥迪 A 8 | S 8 C h i n e s i s c h V R C h i n a 11.2012使用说明书奥迪 A8 | S8A8 混合驱动车Chinesisch VR China 11.2012132.561.4H0.741325614H074© 2012 年奥迪股份公司版权所有奥迪股份公司对所有车型都在不断进行后续开发。
公司可能随时改进产品的外形、装备和技术,因此请您谅解。
本操作手册的数据、附图和说明不能作为提出任何要求的依据。
未经奥迪股份公司书面许可,不得全部或部分翻印、复制或翻译本说明书。
奥迪股份公司拥有著作权法所规定的一切权利。
保留修改的权利。
德国印刷。
定稿日期:2012 年 8 月 31 日环境保护提示本说明书用纸系以无氯漂白纸浆制成。
奥迪 A8奥迪 S8奥迪 A8 hybrid 混合驱动车前言您选择奥迪车作为座驾 - 非常感谢您的信任。
因为拥有新的奥迪,所以您就可以体验领先的技术和高品质的设备带来的享受。
建议您仔细阅读本使用说明书,以便掌握本车性能并能够在日常驾驶中使用全部功能。
除操控信息外,在本使用说明书中还有使用和保养指南用于保证安全和车辆的保值。
此外,我们还向您提供经济和环保驾驶的宝贵信息。
随车资料还包括简要说明书、信息娱乐系统的操作说明书以及保养手册。
祝您的奥迪给您带来无限愉悦,祝您一路顺风。
奥迪股份公司(AUDI AG)1325614H0742目录关于本使用说明书 . . . . . . . . . .4操作 . . . . . . . . . . . . . . . .5驾驶舱 . . . . . . . . . . . . . . .5一览图 . . . . . . . . . . . . . .5仪表和指示灯 . . . . . . . . . . . .7仪表 . . . . . . . . . . . . . . .7指示灯 . . . . . . . . . . . . . .8驾驶员信息系统 . . . . . . . . . .16驾驶员疲劳提示 . . . . . . . . . .20打开和关闭 . . . . . . . . . . . . .21中央门锁 . . . . . . . . . . . . .21行李箱盖 . . . . . . . . . . . . .26儿童保险功能 . . . . . . . . . . .28电动车窗升降器 . . . . . . . . . .29移动/外翻式天窗 . . . . . . . . .30全景玻璃天窗 . . . . . . . . . . .31车灯和视野 . . . . . . . . . . . . .33外部照明 . . . . . . . . . . . . .33内部照明 . . . . . . . . . . . . .37视野 . . . . . . . . . . . . . . .38车窗雨刮器 . . . . . . . . . . . .40座椅和摆放 . . . . . . . . . . . . .42一般说明 . . . . . . . . . . . . .42前座椅 . . . . . . . . . . . . . .42后座椅 . . . . . . . . . . . . . .43头枕 . . . . . . . . . . . . . . .46记忆功能 . . . . . . . . . . . . .47烟灰缸 . . . . . . . . . . . . . .48雪茄托架及烟灰缸 . . . . . . . . .49点烟器 . . . . . . . . . . . . . .49 12 伏插座 . . . . . . . . . . . .49 230 伏欧洲制式插座 . . . . . . . .50一体式中控台 . . . . . . . . . . .51折叠桌 . . . . . . . . . . . . . .51后座踏脚板 . . . . . . . . . . . .52摆放 . . . . . . . . . . . . . . .52行李箱 . . . . . . . . . . . . . .54带袋子的滑雪板装载装置 . . . . . .55冷藏箱 . . . . . . . . . . . . . .55采暖和制冷 . . . . . . . . . . . . .57舒适自动空调装置 . . . . . . . . .57驻车暖风和通风 . . . . . . . . . .61驾驶 . . . . . . . . . . . . . . . .64转向系统 . . . . . . . . . . . . .64启动和关闭发动机 . . . . . . . . .64电控机械式驻车制动器 . . . . . . .66智能启动/停止系统 . . . . . . . .69行车和环境 . . . . . . . . . . . .70限速警告装置 . . . . . . . . . . .72定速巡航装置 . . . . . . . . . . .73混合动力 . . . . . . . . . . . . . .75混合动力驱动 . . . . . . . . . . .75轮胎压力监控系统 . . . . . . . . .82自动变速箱 . . . . . . . . . . . . .85 tiptronic 手动电控换档 . . . . . .85奥迪自适应巡航控制和制动扩展辅助装置90引言 . . . . . . . . . . . . . . .90一般说明 . . . . . . . . . . . . .90自适应巡航控制 . . . . . . . . . .91奥迪制动扩展辅助装置 . . . . . . .95驾驶指南 . . . . . . . . . . . . .96奥迪车道保持辅助系统 . . . . . . . .97车道保持辅助系统 . . . . . . . . .97奥迪侧向辅助系统 . . . . . . . . . .100行驶换道辅助系统 . . . . . . . . .100奥迪驾驶模式选择系统 . . . . . . . .103驾驶设置 . . . . . . . . . . . . .103夜视辅助系统 . . . . . . . . . . . .106夜视辅助系统与识别到的行人的标记 .106以摄像图像为基础的限速显示 . . . . .109说明 . . . . . . . . . . . . . . .109操作 . . . . . . . . . . . . . . .109驾驶指南 . . . . . . . . . . . . .110驻车辅助系统 . . . . . . . . . . . .111概述 . . . . . . . . . . . . . . .111增强版驻车辅助系统 . . . . . . . .111倒车摄像头 . . . . . . . . . . . .112车周摄像头 . . . . . . . . . . . .115调节显示和信号音 . . . . . . . . .1193目录故障报告 . . . . . . . . . . . . .120牵引装置 . . . . . . . . . . . . .120HomeLink . . . . . . . . . . . . . .121通用遥控器 . . . . . . . . . . . .121安全 . . . . . . . . . . . . . . . .123安全驾驶 . . . . . . . . . . . . . .123基本原则 . . . . . . . . . . . . .123乘员的正确坐姿 . . . . . . . . . .124儿童座椅 . . . . . . . . . . . . .126固定儿童座椅 . . . . . . . . . . .128踏板部位 . . . . . . . . . . . . .129正确安放行李件 . . . . . . . . . .130奥迪乘员预防保护系统 . . . . . . . .132乘员预防保护 . . . . . . . . . . .132安全带 . . . . . . . . . . . . . . .134为什么要系带安全带? . . . . . . .134交通事故的基本原理 . . . . . . . .135如何正确系好安全带? . . . . . . .136安全带拉紧器 . . . . . . . . . . .137安全气囊系统 . . . . . . . . . . . .139安全气囊系统说明 . . . . . . . . .139前部安全气囊 . . . . . . . . . . .140侧面安全气囊 . . . . . . . . . . .141头部安全气囊 . . . . . . . . . . .142关闭副驾驶员安全气囊 . . . . . . .143驾驶指南 . . . . . . . . . . . . . .145智能技术 . . . . . . . . . . . . . .145电控行车稳定系统(ESC) . . . . .145制动器 . . . . . . . . . . . . . .146转向助力系统 (servotronic) . . . .147全轮驱动 (quattro) . . . . . . . .147电源管理系统 . . . . . . . . . . .148带拖车行驶 . . . . . . . . . . . . .151带拖车行驶 . . . . . . . . . . . .151拖车牵引装置 . . . . . . . . . . .154维护指南 . . . . . . . . . . . . . .156养护和清洁 . . . . . . . . . . . . .156概述 . . . . . . . . . . . . . . .156外部养护 . . . . . . . . . . . . .156汽车内部养护 . . . . . . . . . . .159检查和添加 . . . . . . . . . . . . .162燃油 . . . . . . . . . . . . . . .162加油 . . . . . . . . . . . . . . .163选择性催化净化还原 . . . . . . . .164发动机舱 . . . . . . . . . . . . .166发动机机油 . . . . . . . . . . . .169冷却系统 . . . . . . . . . . . . .170制动液 . . . . . . . . . . . . . .172蓄电池 . . . . . . . . . . . . . .172车窗玻璃清洗装置 . . . . . . . . .174车轮和轮胎 . . . . . . . . . . . . .175车轮 . . . . . . . . . . . . . . .175应急轮胎 . . . . . . . . . . . . .179轮胎压力监控显示 . . . . . . . . .181附件和技术改装 . . . . . . . . . . .182附件、配件和修理工作 . . . . . . .182技术更改 . . . . . . . . . . . . .182无线发射器和商务设备 . . . . . . .182自助 . . . . . . . . . . . . . . . .184抛锚救助 . . . . . . . . . . . . . .184概述 . . . . . . . . . . . . . . .184装备 . . . . . . . . . . . . . . .184轮胎修理包 . . . . . . . . . . . .185车轮更换 . . . . . . . . . . . . .186备用车轮 . . . . . . . . . . . . .190辅助启动 . . . . . . . . . . . . .191拖车和牵引启动 . . . . . . . . . .192保险丝和灯泡 . . . . . . . . . . . .196电子保险丝 . . . . . . . . . . . .196灯泡 . . . . . . . . . . . . . . .201技术数据 . . . . . . . . . . . . . .204技术数据 . . . . . . . . . . . . . .204汽车特性数据 . . . . . . . . . . .204尺寸 . . . . . . . . . . . . . . .204充填量 . . . . . . . . . . . . . .205技术数据说明 . . . . . . . . . . .205汽油发动机 . . . . . . . . . . . .206柴油发动机 . . . . . . . . . . . .210索引 . . . . . . . . . . . . . . . .2124关于本使用说明书本使用说明书的内容包含关于使用本车的重要信息、提示、建议和警告。
智慧交通出行系统操作手册

智慧交通出行系统操作手册第一章概述 (3)1.1 系统简介 (3)1.2 功能特点 (3)1.2.1 实时交通信息 (3)1.2.2 智能导航 (3)1.2.3 公共交通查询 (3)1.2.4 出租车服务 (3)1.2.5 私家车管理 (4)1.2.6 自行车租赁 (4)1.2.7 个性化推荐 (4)1.2.8 安全保障 (4)第二章系统安装与配置 (4)2.1 安装环境 (4)2.2 安装步骤 (4)2.3 系统配置 (5)第三章用户注册与登录 (5)3.1 用户注册 (5)3.1.1 注册流程 (5)3.1.2 注册注意事项 (5)3.2 用户登录 (5)3.2.1 登录流程 (5)3.2.2 登录注意事项 (6)3.3 密码找回 (6)3.3.1 找回密码流程 (6)3.3.2 密码找回注意事项 (6)第四章实时路况查询 (6)4.1 路况查询界面 (6)4.1.1 界面布局 (6)4.1.2 操作说明 (6)4.2 路况信息展示 (7)4.2.1 道路状况 (7)4.2.2 交通事件 (7)4.2.3 公共交通信息 (7)4.3 路况预警 (7)4.3.1 预警内容 (7)4.3.2 预警级别 (7)4.3.3 预警响应 (7)第五章路径规划 (7)5.1 路径规划界面 (7)5.2 路径推荐 (8)5.3 路径修改 (8)第六章出行服务 (9)6.1 公共交通查询 (9)6.1.1 功能简介 (9)6.1.2 操作步骤 (9)6.1.3 注意事项 (9)6.2 出行方案推荐 (9)6.2.1 功能简介 (9)6.2.2 操作步骤 (9)6.2.3 注意事项 (9)6.3 出行费用计算 (10)6.3.1 功能简介 (10)6.3.2 操作步骤 (10)6.3.3 注意事项 (10)第七章智能停车 (10)7.1 停车场查询 (10)7.1.1 查询界面 (10)7.1.2 搜索功能 (10)7.1.3 停车场详情 (10)7.1.4 实时数据更新 (10)7.2 停车导航 (11)7.2.1 导航界面 (11)7.2.2 导航路径规划 (11)7.2.3 实时路况信息 (11)7.2.4 到达提醒 (11)7.3 停车费用计算 (11)7.3.1 费用计算规则 (11)7.3.2 费用展示 (11)7.3.3 支付方式 (11)7.3.4 费用发票 (11)第八章出行统计分析 (11)8.1 出行数据统计 (11)8.2 出行趋势分析 (12)8.3 出行建议 (12)第九章系统维护与升级 (12)9.1 系统维护 (12)9.1.1 维护目的 (12)9.1.2 维护内容 (13)9.1.3 维护周期 (13)9.2 系统升级 (13)9.2.1 升级目的 (13)9.2.2 升级内容 (13)9.2.3 升级流程 (13)9.3 常见问题解答 (14)第十章安全与隐私 (14)10.1 数据安全 (14)10.1.1 数据加密 (14)10.1.2 数据备份 (14)10.1.3 数据访问控制 (15)10.2 用户隐私保护 (15)10.2.1 用户信息保护 (15)10.2.2 用户行为分析 (15)10.2.3 用户隐私设置 (15)10.3 法律法规与合规 (15)10.3.1 遵守国家法律法规 (15)10.3.2 合规性评估与监测 (15)10.3.3 用户权益保护 (15)第一章概述1.1 系统简介智慧交通出行系统是一款集成了先进的信息技术、数据通信技术、自动控制技术以及计算机处理技术的高效交通管理平台。
转向系统设计计算书
4结论说明∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙7
3.4转向器的内外轮转角:
根据整车设计要求和阿克曼几何原理,可得出理想的阿克曼转角曲线,具体计算如下:
ctg -ctg = 其中K——主销距L——轴距
ctg -ctg =0.55
根据我们设计的转向系统从整车装配数模中可取转向系统需要的设计硬点并建立Adams仿真计算模型,在不考虑轮胎侧偏和所有组件都为刚性的情况下可仿真出实际的内外轮转角曲线。
代入公式Rmin=6549mm即最小转弯半径的理论为6.5m。
3.2转向系的角传动比计算
齿轮齿条式转向系的角传动比i0ω=L/rcosθ
其中L——梯形臂长度;
r——主动小齿轮的节圆半径;
θ——齿轮与齿条的轴交角;
其中L=146.8光洋:r =6.351恒隆:r =6.75θ=20°,θ=25°(优化后)
静态原地转向阻力矩是汽车使用中最大极限转向所需力矩,汽车在沥青或者混凝土路面上的原地转向阻力矩采用下面的经验公式计算:
=
式中 ——轮胎与地面间的滑动摩擦系数,一般取0.8左右。
——转向阻力矩,单位N·mm;
——前轴负荷,单位N;
——轮胎气压,单位MPa。
根据整车参数,CC6460K/KY车满载前轴荷为1070㎏,约为10486N,轮胎气压为230KPa,梯形臂L1=147㎜,转向器梯形底角α=76°,动力受压面积S=9.18㎝2。
知从青龙BOOTLOADER产品手册说明书
知从青龙BOOTLOADER产品手册知从®青龙BootLoader1功能概述知从青龙BootLoader是由知从科技自主研发的程序刷新软件(BootLoader)。
使用知从青龙BootLoader的控制器,可以通过CAN、LIN、SPI等通信方式实现应用程序的更新功能。
目前,知从青龙BootLoader已支持NXP、Infineon、Renesas、ST等多家芯片,并且支持多家整车厂程序刷新规范,可提供定制开发服务。
通常每家整车厂都有各自的程序刷新规范,目前知从青龙BootLoader支持的整车厂程序刷新规范包括:广汽、长安、上汽、一汽、东风商用车、东风、上海通用、吉利、奇瑞、上汽通用五菱、萨博、长城、北汽新能源等(以上排名不分先后)。
2应用领域知从青龙BootLoader可应用于整车各个域中的控制器程序刷新功能。
支持的控制器包括:车身系统车身控制器、空调控制器、车门控制器、网关等动力系统发动机控制器、电池管理系统、电机控制器、整车控制器等底盘系统电动助力转向系统、制动防抱死系统、电气稳定系统等ADAS系统雷达、摄像头系统等3芯片支持4开发背景目前,汽车上的电子电气架构越来越复杂,并伴随着汽车的电动化、智能化、网联化、共享化,软件的研发在汽车上占比越来越大。
软件更新的频率越来越高。
而且,在汽车的整个生命周期中,包括研发阶段、生产阶段、售后阶段,各个阶段都需要实现软件的更新功能。
因此,客户对软件程序更新的需求越来越迫切。
对于整车厂或供应商,BootLoader是控制器开发必备的功能。
并且,不同的整车厂有不同的程序更新规范,同时BootLoader驱动又依赖于不同的芯片。
因此,为了满足不同的整车厂程序更新规范,又适配不同的芯片,知从科技提供了完整的BootLoader解决方案—知从青龙BootLoader。
知从青龙BootLoader既适用于不同的整车厂程序更新规范,又适用于不同芯片厂商的芯片,让客户更专注与自己的控制器产品研发。
软件系统操作手册模板
<项目名称>操作手册作者:完成日期:签收人:签收日期:修改情况记录:目录1 引言 (1)1.1 编写目的 (1)1.2 背景 (1)1.3 定义 (1)1.4 参考资料 (1)2 软件概述 (1)2.1 软件的结构 (1)2.2 程序表 (2)2.3 文卷表 (2)3 安装与初始化 (2)4 运行说明 (2)4.1 运行表 (2)4.2 运行步骤 (2)4.3 运行1(标识符)说明 (2)4.3.1 运行控制 (3)4.3.2 操作信息 (3)4.3.3 输入-输出文卷 (3)4.3.4 输出文段 (3)4.3.5 输出文段的复制 (4)4.3.6 恢复过程 (4)4.4 运行2(标识符)说明 (4)5 非常规过程 (4)6 远程操作 (4)1 引言1.1 编写目的说明编写这份操作手册的目的,指出预期的读者范围。
1.2 背景说明:a.这份操作手册所描述的软件系统的名称;b.列出本项目的任务提出者、开发者、用户(或首批用户)以及安装该软件的单位。
1.3 定义列出本文件中用到的专门术语的定义和缩写词的原词组。
1.4 参考资料列出要用到的参考资料,如:a.本项目的经核准的计划任务书或合同、上级机关的批文;b.属于本项目的其他已发表的文件;c.本文件中各处引用的文件、资料,包括所要用到的软件开发标准。
列出这些文件的标题、文件编号、发表日期和出版单位,说明能够得到这些文件资料的来源。
2 软件概述2.1 软件的结构结合软件系统所具有的功能包括输入、处理和输出提供该软件的总体结构图表。
2.2 程序表列出本系统内每个程序的标识符、编号和助记名。
2.3 文卷表列出将由本系统引用、建立或更新的每个永久性文卷,说明它们各自的标识符、编号、助记名、存储媒体和存储要求。
3 安装与初始化一步一步地说明为使用本软件而需要进行的安装与初始化过程,包括程序的存在形式,安装与初始化过程中的全部操作命令,系统对这些命令的反应与答复,表征安装工作完成的测试实例等。
说明书及维修手册
A、汽车电动助力转向器简介电动转向系统(EPS,Electrie Power Steering)是未来转向系统的发展方向。
该系统由电动机直接提供转向助力,省去了液压动力转向所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境,另外,还具有调整简单、装置灵活以及无论在何种工况下都能提供转向助力的特点。
正是有了这些优点,电动转向系统作为一种新的转向技术,将挑战大家都非常熟知的、已具有50多年历史的液压转向系统。
1、电动转向系统电动转向系统是于20世纪80年代中期提出来的。
该技术发展最快、应用较成熟的当属TRW转向系统和Delphi Saginaw(萨吉诺)转向系统,而Delphi Saginaw(萨吉诺)转向系统又代表着转向系统发展的前沿。
她是第一个于20世纪50年代把液压助力转向系统推向市场的,从此以后,Delphi转向发展了技术更加成熟的液压助力系统,使大部分的商用汽车和约50%的轿车装备有该系统。
现在,Delphi 转向系统又领导了汽车转向系统的一次新革命电动转向系统。
电动转向系统符合现代汽车机电一体化的设计思路,该系统由转向传感器装置、车速传感器、助力机械装置、提供转向助力机及微电脑控制单元组成。
该系统工作时,转向传感器检测到转向轴上转动力矩和转向盘位置两个信号,与车速传感器测得的车速信号一起不断地输入微电脑控制单元,该控制单元通过数据分析以决定转向方向和所需的最佳助力值,然后发出相应的指令给控制器,从而驱动电机,通过助力装置实现汽车的转向。
通过精确的控制算法,可任意改变电机的转矩大小,使传动机构获得所需的任意助力值。
2、电动转向系统的特点液压助力转向系统已发展了半个多世纪,其技术已相当成熟。
但随着汽车微电子技术的发展,对汽车节能性和环保性要求不断提高,该系统存在的耗能、对环境可能造成的污染等固有不足已越来越明显,不能完全满足时代发展的要求。
电动转向系统将最新的电力电子技术和高性能的电机控制技术应用于汽车转向系统,能显著改善汽车动态性能和静态性能、提高行驶中驾驶员的舒适性和安全性、减少环境的污染等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转向系统设计与开发序言转向系统在底盘系统中占据着非常重要的地位,涉及了操纵稳定性,NVH性能,造型和人机工程学等多个领域。
国内外涉及转向系统零部件开发和系统集成的书籍不多,而且讲解不够全面。
为了提升转向系统的设计开发能力,积累案例和经验。
因此,科室基于在吉利汽车各项目中转向系统设计和开发过程中,对设计,试验,调试和开发流程进行总结;并借鉴了国内外零部件和OEM的设计和开发经验,组织科室工程师编著此书。
转向系统主要分为HPS(液压助力转向系统)和EPS(电动助力转向系统)两种形式,本书分别对这两种转向系统进行了详细的研究。
首先阐述了转向系统的结构、工作原理及设计准则,然后将系统目标分解到零部件级别。
研究内容包括:1.概述;2.结构工作原理;3.设计准则;4.技术标准;5.试验标准及设备。
从理论计算分析到实际开发的具体指标要求,涵盖了大量的公式、图表和数据,最终通过设计出合格的零部件来达到转向系统的要求。
本书在选择典型实例时,基本采用吉利产品研发中的实例,同时对标行业优秀产品,具有代表性和实际价值。
由于电子技术在汽车上应用的快速发展,本手册在转向系统的发展趋势和新技术方面也做了相应的介绍,包括可变传动比、线控转向、车道保持辅助、自动泊车、主动转向等一系列新技术。
除新技术外,本手册还从开发流程和性能开发两个方面分别对转向系统的开发体系进行了详细阐述。
手册的附录包含:设计问题汇总,国内外零部件和OEM的设计资料清单有利于工程师在产品开发时有依可循,对曾经出现过的问题进行规避。
本书名词术语和计量单位符合行业通用标准,并且做到了文字准确、简练、流程,图表正确,文图配合恰当,内容阐述条理清晰,循序渐进,理论与实践兼备,适合转向系统工程师学习。
承蒙吉利研究院底盘开发部各科室的大力支持和帮助,并提供了有关图纸和资料,谨此致谢。
编者2014年1月第一章液压助力转向系统1.1 基本理论1.1.1概述转向系统通过转向盘及相关的转向传动、执行机构来控制转向轮绕主销转动,从而实现汽车的转向,这就是汽车最基本的转向功能。
其次是凭借转向盘的力的反馈,将整车及轮胎的运动、受力状况反馈给驾驶员,这就是我们通常所说的路感。
这种反馈也是驾驶员感觉、检测车辆运动状态的重要途径之一,是评价车辆操控性能的评价指标之一。
这里所说的方向盘反馈给驾驶员的力与驾驶员施加给方向盘的力是一对作用力与反作用力,它们大小相等,方向相反。
过于追求转向力的轻便必定会以牺牲部分路感为代价的。
1.1.2结构及工作原理1) 结构液压助力转向系统结构见图1.1,包括动力转向器带横拉杆总成,动力转向油泵,动力转向油壶,动力转向高低压油管,转向管柱及中间轴总成等。
图1.1 转向系统结构简图2) 工作原理发动机带动动力转向油泵运转,油泵从油壶中吸取转向液并在运转的过程中排入动力转向高压油管,从而进入转向器阀体。
当方向盘不转动,油液将直接流出转向器阀体,流入动力转向低压油管,最后进入动力转向油壶,从而形成循环。
当方向盘向右转动时,转阀打开,油液从转向器的左侧油管进入油缸推动活塞向右侧运动,右侧油缸的油液右侧油缸流出从右侧油管流入转阀,经由动力转向低压油管进入转向油壶。
1.1.3 设计准则1、转向梯形断开点定义在汽车转向杆系与悬架的匹配设计中主要考虑:①使内外轮有足够大的转角来达到整车最小转弯半径的要求;②当车轮上、下跳动(悬架压缩,伸张)时由转向杆系与悬架的运动干涉所引起的车轮前束角变化尽可能小;③汽车转向行驶、车身发生侧倾时,由上述两种机构运动干涉所引起的侧倾转向角(车轮前束角变化)尽可能小或有利于不足转向;④由悬架中橡胶元件的受力变形所引起的车轮前后移动要尽可能不引起前束角的变化。
所以,整车转向器横拉杆断开点的设计,需要考虑的几个主要因素:①悬架垂直载荷与车轮跳动之间的关系;②轮跳动与弹簧的压缩比之间的关系;③轮跳动与减震器的行程比(实际行程与总行程的比例)之间的关系;④车轮跳动与前束角的变化之间的关系;⑤车轮跳动与前轮距的变化之间的关系;⑥车轮跳动与外倾角的变化之间的关系;⑦车轮跳动与整车翻滚中心高度之间的关系;⑧横向载荷与外倾角变化之间的关系;⑨横向载荷与轮距(接地点)变化之间的关系;⑩驱动力与前束角变化之间的关系;○11驱动力与轮距(车轮中心)变化之间的关系;○12制动力与前束角变化之间的关系,见表1.1。
表1.1 转向器横拉杆断开点的关键参数1) 平面画图法在汽车采用麦弗逊独立悬架情况下,前轮上下轮跳时,E和G点之间的距离要发生变化。
因此,要采用不同的方法确定转向连杆断开点的位置。
在转向节臂铰点U点在主销轴线外侧、并且略高于悬架下摆臂与转向节的铰点G。
在这个系统中确定断开点T的步骤如下,见图1.2。
(1) 确定转向节的运动瞬时中心P1。
转向节在E点的绝对速度就是沿着减振器轴线的相对速度,因为在这一点的牵连速度(由减振器轴线绕E点转动引起)为零,所以转向节在E点的瞬时运动中心位于过E点所做的与减振器轴线相垂直的直线EP1上。
悬架控制臂轴线GD的延长线与EP1相交于P1点,其就是转向节的瞬时运动中心。
(2) 确定P2点。
过G点做直线EP1的平行线GP2,与其与E,D连线的延长线交于P2点。
(3) 去定角alpha。
U点式转向节臂与转向横拉杆的铰点。
转向横拉杆应该位于U,P1点的连线上。
直线EP1与直线UP1之间的夹角为alpha。
(4) 确定P3点。
过P1做一条直线P1P3,使其余直线P1P2的夹角为alpha;P1P3与U、G连线的延长线交于P3。
(5) 确定断开点T,P3、D点连线的延长线与直线P1U交于T,它就是转向拉杆的断开点。
图1.2 转向拉杆内断开点确定方式如果转向节铰点U在主销轴线内侧,并且比较高。
而U点位置越高并且其越靠近内侧,则将获得越长的转向连杆UT,这将导致采用中央输出式齿轮齿条转向器。
图1.3 前束角随前轮上下跳动的变化特性图1.3中给出三辆前轮驱动汽车的左前轮的前束角随车轮上下跳动的变化曲线(测量结果)。
其中具有特性曲线1、2的汽车采用的基本上是按照前束方法确定的转向连杆断开点,其特点是在设计位置附近前束角随车轮上下跳动而变化的斜率基本上是零,而且在整个车轮跳动范围内前束角的变化比较小(最大变化量一般不超过1°)。
特性曲线3不同,在其设计位置的前束角变化斜率为一个负值,即随着车轮上跳前束角减小。
而在汽车向右转向行驶时,左前轮为外侧车轮,由于车身侧倾,其相对于车身向上跳动,前束角减小有利于不足转向。
如图1.4,需要把断开点T2布置在理想断开点T以上就可以获得曲线3那样的前束变化特性,及当车轮上跳时,U点就会被推向外侧,引起车轮的前束角变化。
当然,如果定量评价侧倾不足转向。
图1.4 趋于不足转向的断开点设计转向梯形的确定较为复杂,主要和悬架的动态特性连接非常紧密,所以在进行转向梯形分析的时候需要借助与悬架的动态分析,并运用专门的CAE动态分析软件进行处理。
在改进和确定转向梯形时需要重点考虑以下因素,特别是前悬架的跳动及各种路况下的姿态对前轮定位参数的影响。
特别是不足转向特性的变化需要特别地关注。
车轮前后移动时前束角的控制前悬架设计要求车轮能够相对车身前后移动一定距离。
为达到这个目的而采用的悬架和转向杆系设计,其中采用麦弗逊式悬架和齿轮齿条转向器。
在图1.5所示系统中,悬架下摆臂的前安装点A相当于一个铰点,后安装点B是一个具有一定刚度的橡胶件。
在驱动力Fa、制动力F R的作用下,下摆臂在B点处将发生一定的横向位移。
转向连杆和悬架下摆臂的设计应该保证车轮在纵向力作用下只做平动,而不发生前束角变化。
图1.5 车轮前后移动时前束角的控制2、最小转弯半径汽车最小转弯半径汽车回转时汽车的前轮外侧循圆曲线行走轨迹的半径,见图1.6。
图1.6 转向内外轮转角和转弯半径最小转弯半径计算方法见公式1.1R min=L−R0Tanδ2a+r(1.1)sin(θ0max−δ1o)式中δ2a——后轴中心侧偏角;δ1o——前轴外轮侧偏角;r——主销偏移距;θ0max——前轴外轮最大转向角。
当转向盘转到极限位置,汽车以最低稳定车速转向行驶时,外侧转向轮的中心平面在支承平面上滚过的轨迹园半径。
它在很大程度上表征了汽车能够通过狭窄弯曲地带或绕过不可越过的障碍物的能力。
转弯半径越小,汽车的机动性能越好。
最小转弯半径由整车级进行定义,而转向梯形设计,内外轮转角和齿条行程设计时需要保证实现最小转弯半径的目标。
3、最大内外轮转角的定义当最小转弯半径确定后,外轮转角就随之确定下来。
而如何通过设计合理的转向梯形设计内外轮转角的关系是至关重要的,也是转向梯形设计的主要指标。
内轮转角的大小可以尽可能的大,提高车辆的机动能力,但是,受到造型和脚部布置的影响,内轮转角受到限制。
内轮转角一定是大于外轮转角。
内轮转角的大小,取决于转向横拉杆内外点的设计和齿条行程,如果转向横拉杆内外确定的条件下,内轮转角至于齿条行程相关。
在齿条行程的定义中可以同时考虑。
4、齿条行程的定义齿条行程基于齿轮齿条转向器设计的技术参数,是为实现内外轮转角的关键参数。
当转向横拉杆长度及平面布置角,转向节臂长度及平面布置角确定,悬架四轮参数确定后,即可设计齿条行程和内外轮转角的关系。
主要的设计输入输出和车型对比见表1.2。
齿条行程和内外轮转角的关系见图1.7。
图1.7 齿条行程和内外轮转角关系图表1.2 齿条行程计算设计输入5、有效转向节臂长度转向节臂长度是转向横拉杆外球头中心点到悬架主销轴线的垂直距离,是悬架系统力矩作用到转向梯形上的力臂。
车轮在转动过程中,由于转向节臂与转向横拉杆角度的变化,力臂会发生变化,变化的力臂成为有效转向节臂长度,见图1.8。
转向节臂长度的相关参数包括转向拉杆的长度,平面布置角度,转向节臂的长度和布置角度,以及转向器内球头点的距离,齿条行程。
具体计算结果见表1.3。
有效转向节臂与齿条行程的关系见图1.9,转向节臂与转向横拉杆的夹角见图1.10。
图1.8 转向拉杆和转向节臂变化平面图图1.9 有效转向节臂长度与齿条行程的关系图1.10 转向节臂与转向横拉杆夹角和齿条行程的关系表1.3 转向节臂与拉杆计算结果6、驻车状态下横拉杆和齿条力的定义驻车齿条力是指车辆在干燥沥青或水泥路面驻车,转动方向盘过程中,由于车轮与地面摩擦以及悬架自回正特性产生的力矩左右到齿条上的结果。
齿条力是用于设计转向器和助力系统的重要前提条件。
在车辆转向过程中,车辆会受到侧向力和垂向力矩的作用,见图1.11,在驻车情况下侧向力为零。
所以,原地驻车力矩就可以通过公式计算出来。
图1.11 车轮受力分析2132)(32πμP FM =(1.2)P ——轮胎气压;F ——垂直载荷;R ——轮胎接地面积;M ——摩擦力矩;μ——摩擦系数;齿条力与原地驻车力矩的就是对有效转向节臂的比。