现代控制理论基础第二章习题答案
《现代控制理论》课后习题全部答案(最完整打印版)

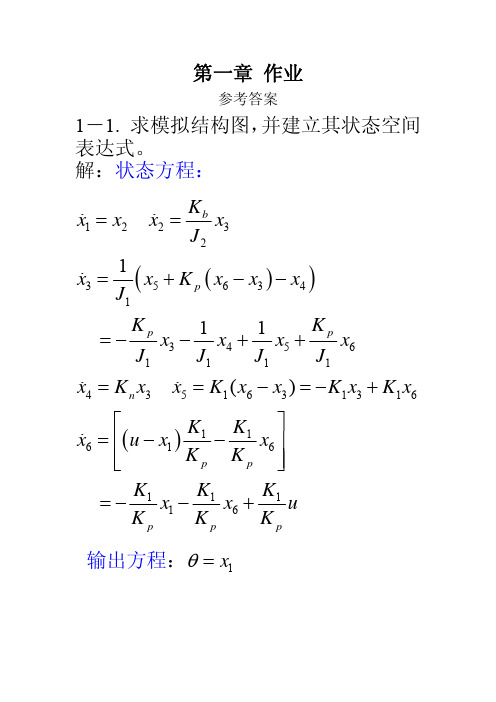
第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:阿令,则所以,系统的状态空间表达式及输出方程表达式为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
(2)A=解:第一种方法:令则,即。
求解得到,当时,特征矢量由,得即,可令当时,特征矢量由,得即,可令则,第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理由第一种方法可知,2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A阵。
《现代控制理论》第三版 第二章.习题答案

2-7. 证明 2-3 中,状态方程的解: 1. 即当u(t ) K (t ),x(0 ) x0时
x(t ) e At x0 e At BK , 式中K 与u(t )同维的常数矢量。
x e x0 e A( t ) BK ( )d
At 0 t
e x0 e A( t ) ( )d BK
得 1 0; 2 1.
1 0 据 1 I A P P 1 1 0 1 0
得到 P 1 0 1 ;
T
0 0 P2 0 得 到 根 据 2 I A P2 1 1
1 0 1 1 1 于是T , P2 , T 1 1 1 1 于是 T 1 0 e 1 G (T ) e AT T T T T e 1 0 e t T T e 0 K At H (T ) e dtB dt 0 0 1 et 1 0 1 0
1
e At 0 (t ) I 1 (t ) A
1 2cos 2t 2 4sin 2t
sin 2t 2cos 2t
1 1 (2) A 4 1
1 22 1 33 A t A t 2! 3! 直接法: 7 3 t 2 13 3 2 1 5 , t t t t t 2! 6 6 2 28 3 t 13 3 2 4 4 , 1 5 t t t t t 6 2! 6 e At I At
y 2 x1 x2
1 1 0 x1 K x x 2 1 0 x2 0 即 x1 y 2 1 x2 0 u1 u 1 2
现代控制理论课后题及答案
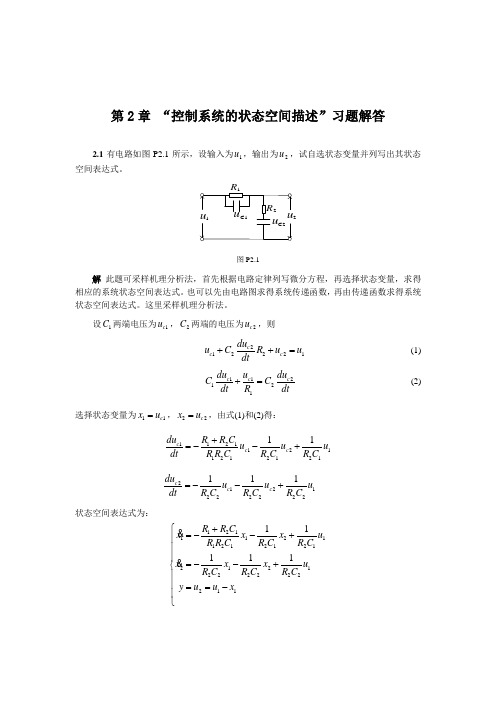
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
现代控制理论 王金城 第二章答案
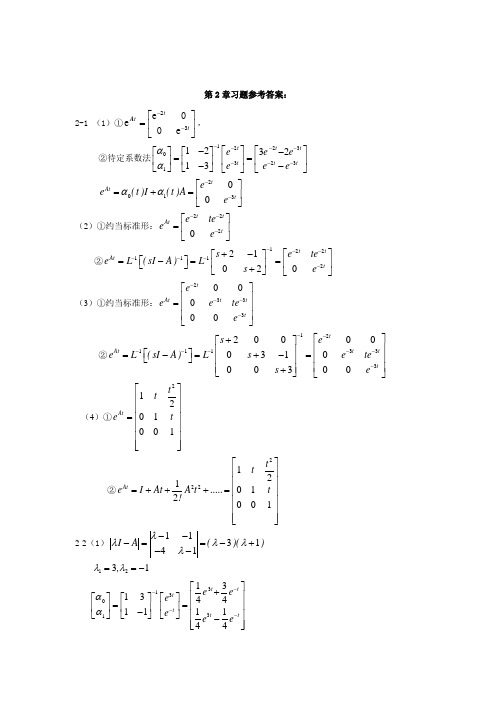
第2章习题参考答案:2-1 (1)①⎥⎦⎤⎢⎣⎡=--t t t3200e e eA , ②待定系数法122303231123213t t t t t t e e e e e e αα--------⎡⎤⎡⎤-⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦201300t At t ee (t )I (t )A e αα--⎡⎤=+=⎢⎥⎣⎦(2)①约当标准形:2220tt At t e te e e ---⎡⎤=⎢⎥⎣⎦②122111221020t t At t s e te e L (sI A )L s e -------+-⎡⎤⎡⎤⎡⎤=-==⎢⎥⎢⎥⎣⎦+⎣⎦⎣⎦(3)①约当标准形:233300000t Att t t e e e te e ----⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦②1211133320000031000300t At tt t s e e L (sI A )L s e te s e --------⎡⎤+⎡⎤⎢⎥⎢⎥⎡⎤=-=+-=⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦(4)①21201001Att t e t ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦②222121012001Att t e I At A t .....t !⎡⎤⎢⎥⎢⎥=+++=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦2-2(1)113141I A ()()λλλλλ---==-+--1231,λλ==-313031131344111144t t tt t t e e e e e e αα----⎡⎤+⎢⎥⎡⎤⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎢⎥⎣⎦-⎢⎥⎣⎦330133111122441122t tt t At t t t t e e e e e (t )(t )A e e e e αα----⎡⎤+-⎢⎥=+=⎢⎥⎢⎥-+⎢⎥⎣⎦(2)1011236116I A ()()()λλλλλλλ--=-=++++123123,,λλλ=-=-=-2310223132231662211111245832139122t t t tt t t t t t t t(e e e )(t )e (t )e (e e e )(t )e (e e e )ααα-------------⎡⎤--+-⎢⎥⎡⎤-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-=--+-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥--+-⎢⎥⎣⎦⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+-+--+--+--+-+-+-+-=---------t t t tt t t t t t t t t t t t t t t t t t t t tt t t3-2-3-2-3-2-3-2-3-2-3-2--3-2-3-2-3-2 4.540.513.5162.59123 1.520.54.582.53630.50.51.542.533e e e e e e e e e e e e e e e e e e e e e e e e e e e e A 2-3 ①211012I A ()λλλλ--==+=+ 121λλ==-11010111P λ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦ 11011P -⎡⎤=⎢⎥⎣⎦ 11101A P AP --⎡⎤==⎢⎥-⎣⎦ ②Laplace 变换法:1111112t t t At tt t s te e te e L (sI A )L s te e te -----------⎡⎤+⎡⎤⎡⎤=-==⎢⎥⎢⎥⎣⎦+--⎣⎦⎣⎦③待定系数法:1011101t t t t t(t )e e te (t )te te αα-------⎡⎤⎡⎤+⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦01Ate (t )(t )A αα=+=t t t t t t te e te tee te ------⎡⎤+⎢⎥--⎣⎦ 2-4(1)1000001010()I ⎡⎤⎢⎥Φ=≠⎢⎥⎢⎥-⎣⎦∴不满足条件; (2)10001()⎡⎤Φ=⎢⎥⎣⎦ ∴满足条件11(0)41A ⎡⎤=Φ=⎢⎥⎣⎦2-5 2211120t t (e )(t )e --⎡⎤-⎢⎥Φ=⎢⎥⎣⎦①自身性 10001()I ⎡⎤Φ==⎢⎥⎣⎦② 传递性1021102122211020221111112200(t t )(t t )(t t )(t t )(e (e (t t )(t t )(t t )e e --------⎡⎤⎡⎤---⎢⎥⎢⎥Φ-⋅Φ-=⋅=Φ-⎢⎥⎢⎥⎣⎦⎣⎦③可逆性0000122100221111112200(t t )(t t )(t t )(t t )(e )(e (t t )(t t )e e ----------⎡⎤⎡⎤--⎢⎥⎢⎥Φ-=⋅=Φ-⎢⎥⎢⎥⎣⎦⎣⎦1(t )(t )-Φ=Φ- ∴满足2-6 (1)000t A(t )⎡⎤=⎢⎥⎣⎦202000t tA()d ττ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦⎰,141202100080000000t t d d τττττ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦⎰⎰ 42t t 1000(t,0)82010000⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥Φ=+++⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦ ()t t t ⎡⎤++⎢⎥=⎢⎥⎢⎥⎣⎦241+0,02801Φ (2)00t te A(t )e--⎡⎤=⎢⎥⎣⎦0010010t t t e e d eeτττ----⎡⎤⎡⎤-=⎢⎥⎢⎥-⎣⎦⎣⎦⎰ 1212121010100010t e e d d e eτττττττ----⎡⎤⎡⎤⎡⎤--⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎰⎰ ∴⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++++=-- 21+00-00-021+00,2--2tt tt t e e e e )(Φ 2-7 ∵1At 1111s 1cos 2t sin 2t e L (sI A )L 44s 2sin 2t cos 2t ----⎡⎤-⎡⎤⎢⎥⎡⎤=-==⎢⎥⎣⎦⎢⎥-⎣⎦⎣⎦∴1(t )(t )(0)-Φ=x x-1-2t -t 2t t 2t t 1-2t-t 2t t2t t 12e 2e e 2e 2e 2e (t )(t )(0)-1-1-e -e e e2e e ---------⎡⎤⎡⎤-+-+⎡⎤==⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦Φ=x xt 2tt 2t t 0t 0t2tt 2t 42-2e -2e -2e -4e (t )13e -2e e -4e ----==-----⎡⎤⎡⎤==⎢⎥⎢⎥--⎣⎦⎣⎦A =Φ2-8 e e e e ()e e e e t t t t ttt t t tt (t )(t )t -=-⎡⎤+-=-==⎢⎥+-+⎣⎦ΦΦΦ221222222 2-9 (1)AttA(t )0(t )e (0)e Bu()d τττ-+⎰x x =At 222100t 01011t 11I At A t t 010********!2⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=+++=+++=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦e 2t 0t 11t 01t (t )d 2110011t ττ⎡⎤-⎡⎤⎡⎤⎡⎤⎡⎤+-⎢⎥+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦+⎢⎥⎣⎦⎰1t x =0(2)1t 2t t 2t At 111t 2tt 2t s 12e e e e e L (sI A )L 2s 32e 2e e 2e -------------⎡⎤--⎡⎤⎡⎤=-==⎢⎥⎢⎥⎣⎦+-+-+⎣⎦⎣⎦At t A(t )0(t )e x(0)e Bu()d τττ-=+⎰x22154()2245tt t t e e x t e e ----⎡⎤+-⎢⎥=⎢⎥-+⎣⎦2-10 Att A(t )0(t )e x(0)e Bu()d τττ-=+⎰x1At 1111s 1cos 2t sin 2t e L (sI A )L 44s 2sin 2t cos 2t ----⎡⎤-⎡⎤⎢⎥⎡⎤=-==⎢⎥⎣⎦⎢⎥-⎣⎦⎣⎦∴⎥⎦⎤⎢⎣⎡+-=t t t t t 22220.52cos sin sin cos )(x 2-11 121det(I A)(3)(1),1,334λλλλλλλ--==--==-∴11P 13⎡⎤=⎢⎥⎣⎦1311P 112--⎡⎤=⎢⎥-⎣⎦ ∴t 3tt 3t Att1t3tt 3t 3e e e e 1e Pe P 23e 3e e 3e Λ-⎡⎤--+==⎢⎥--+⎣⎦∵At(t )e (0)=x x ∴()t 3t At t 3t 0.5e 3.5e (0)e (t )0.5e 4.5e ⎡⎤+==⎢⎥+⎣⎦-1x x 2-1211i c U iR idt C U idtC=+=⎰⎰则 cc i dU RC U U dt+= 1,1R m C F μ=Ω=则()()()c c i U t U t U t +=()[1]c c i U t U U =-+[1][1][1]()At tA sI A s sI A s t e e -=-∴-=+-=+∴Φ==()()()()()01()0(1)0()010010--------=+=+⎡⎤=+-⎣⎦⎰⎰tAtA t c C i t t C t t tC u t e u e Bu d e u e d e u e e τττττ()323()0(3)(0)10()0(0)10(1)()10(1)------=+-=∴=-∴=-+⎰ c c c tt t c i u e u e e u e Vu t e e e u d τττ当t=0时,()c u t 10(1e)=- 当()tt(t )(t 1)c 00t 1,u t 10e (1e)10e|10(1e )---τ--<≤=-+=-当c t 1,u (t)0>=2-13 设()12x (kt )y(kt )x (kt )y k 1t =⎧⎪⎨=+⎡⎤⎪⎣⎦⎩∴ ()()()()12221x k 1T y k 1T x (kT )x k 1T y k 2T u(kT )0.5x (kT )0.1x (kT )⎧+=+=⎡⎤⎡⎤⎪⎣⎦⎣⎦⎨+=+=--⎡⎤⎡⎤⎪⎣⎦⎣⎦⎩ ∴状态空间表达式为:()010x k 1T x(kT )u(kT )0.10.51⎡⎤⎡⎤+=+⎡⎤⎢⎥⎢⎥⎣⎦--⎣⎦⎣⎦()[]y k 1T 10x(kT )+=⎡⎤⎣⎦若初始值y(0)=1,y(T)=0逆推y(2T)+0.5y(T)+0.1y(0)=1∴y(2T)=0.9,y(3T)=0.55,y(4T)=0.635()()()()()()()()()()(0)=+-+-+-+-+-+-+-+-+-y kT δt δt T δt T δt T δt T δt T δt T δt T δt T δt T 0.920.5530.63540.627550.622760.625870.624780.625090.625012-14t 2tt 2t Att1t tt 2t 2e e e e (t )e Pe P 2e 2ee 2e ----Λ-----⎡⎤--===⎢⎥-+-+⎣⎦Φ 设x(k 1)x(k )u(k )+=+G H0.9670.148(T)0.2960.522⎡⎤==⎢⎥-⎣⎦G Φt 2t T T 0t 2t 0.017e e (t )Bdt Bdt 0.148e 2e ----⎡⎤-⎡⎤===⎢⎥⎢⎥-+⎣⎦⎣⎦⎰⎰H Φ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦,G H 0.96710.14840.0170.29680.52190.148离散化状态方程 :()()()0.9670.1480.017k 1k u k 0.2960.5220.148⎡⎤⎡⎤+=+⎢⎥⎢⎥--⎣⎦⎣⎦x x 1z 0.5220.148(z 0.82)(z 0.669)(z 0.82)(z 0.669)(z )0.269z 0.967(z 0.82)(z 0.669)(z 0.82)(z 0.669)--⎡⎤⎢⎥----⎢⎥-=--⎢⎥⎢⎥----⎣⎦I G ()11(k)z z z --⎡⎤=-⎣⎦ΦI G∴k k 1kk k 1k k 1k k 1k 1k k 1(1)2(1)2(1)(1)2()(1)2(1)2(1)(1)2++++++⎡⎤-⋅+-⋅-+-⋅=⎢⎥-⋅+-⋅-+-⋅⎣⎦k Φ2-15(1)AT221T 1G eI AT A T 012⎡⎤==+++=⎢⎥⎣⎦2T T 00T 1t 0(t )Bdt dt 2011T ⎡⎤⎡⎤⎡⎤⎢⎥===⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦⎰⎰H Φ 当T=1s 时,()()()110.5k 1k u k 011⎡⎤⎡⎤+=+⎢⎥⎢⎥⎣⎦⎣⎦x x []10(k )=y x (2)()2T 1AT 112T 1s 1T (T e )e L sI A L 20s 20e -----⎡⎤--⎡⎤⎢⎥⎡⎤==-==⎢⎥⎣⎦⎢⎥+⎣⎦⎣⎦G 22T 2tT T002t 2T 1T 111(e )(t e )2224(t )Bdt dt 211ee 22----⎡⎤⎡⎤+-⎢⎥-⎢⎥===⎢⎥⎢⎥⎢⎥-+⎣⎦⎢⎥⎣⎦⎰⎰H Φ 当T=1时,222211e 1(1e )4(k )(k )u(k )2110e e 22----⎡⎤⎡⎤⎢⎥-⎢⎥+=+⎢⎥⎢⎥⎢⎥-+⎣⎦⎢⎥⎣⎦x x 1,)()(k k x y ⎥⎦⎤⎢⎣⎡=0110 2-16 (1)211G(s )(s 1)(s 2)s 3s 2==++++ 状态空间描述为:010x u 231⎡⎤⎡⎤=+⎢⎥⎢⎥--⎣⎦⎣⎦x[]y 10=x将其离散化--------⎡⎤--==⎢⎥-+-+⎣⎦T 2TT 2T ATT 2T T 2T 2e e e e G e2e 2ee 2e T 2T t 2t T T00t 2t T 2T 11e e e e (t )dtB dt 22e 2e e e --------⎡⎤⎡⎤-++-⎢⎥===⎢⎥⎢⎥-+⎣⎦-⎣⎦⎰⎰H Φ ∴离散化状态方程为:------------⎡⎤⎡⎤-++--⎢⎥+=+⎢⎥⎢⎥-+-+⎣⎦-⎣⎦T 2T T 2TT 2T T 2TT 2T T 2T11e e 2e e e e x[(k 1)T ]x(kT )u(kT )222e 2ee 2e e e ()[]()y k T 10x k T= (2)2T T2T T T 2TT 2T 2111z e z e z e z e ()2221z e z e z e z e ---------⎡⎤--⎢⎥----=⎢⎥⎢⎥--⎢⎥----⎣⎦Z I G 1-0.20.10.20.10.10.20.10.20.2k 0.1k 0.2k 0.1k0.1k0.2k0.1k 0.2k()[()]2zz z z z e z e z e z e =2z 2z 2z z z e z e z e z e 2(e )(e )(e )(e )2(e )2(e )2(e )(e )-------------------Φ=⋅⎡⎤--⎢⎥----⎢⎥⎢⎥--⎢⎥----⎣⎦⎡⎤--=⎢⎥--⎣⎦k Z Z ZZ 111-I G2-17 k=0时,10.510.3(1)(0)u(0)u(0)010.110.4⎡⎤⎡⎤⎡⎤=+=+=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦x Gx Hk=1时,(2)(1)u(1)=+x Gx H 带入(1)x 得,1.50.3u(0)0.550.2u(0)0.3u(1)(2)01.50.03u(0)0.110.04u(0)0.4u(1)++++⎡⎤==⎢⎥++++⎣⎦x 解得 u (0)=5.35 u (1) =0.51。
现代控制理论第二章答案
et
2e 2t
4e2t 2et
4e2t
et
0 1
2 3
(4)
(t)(t)
1
2
(et
e3t
)
(et e3t )
141((eet tee33t t))
1 (et 2 (et
e3t ) e3t )
2
141((eet tee33t t)) I
2
(t)
d dt
1 2
(t)
et
e2t
2e2t 2et
2e2t
et
(4)
(t )
1
2
(et
e3t
)
(et e3t )
141((eet tee33t t))
2
【解】 主要验证矢量不变性:
(t)(t) I
和组合性质: (t2 t1)(t1 ) (t2 )
(1)
1
(t)(t) 0
0
0 sin t cost
8
8
(
z
1 8
3)(z
5)
8
8
(
z
z1 2
3)(z
5)
8
8
x(z) (zI G) 1 zx(0) Hu(z)
(
z
z1 2
3)(z
5)
8
8
1 8
(
z
3)(z
5)
8
8
( (
z z
1 8
3)(z 8 z1
2 3)(z
5 8
5
) )
z
1
3
1 0
8
8
zT
(et
(et
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
《现代控制理论》课后习题答案2
( sI − A) −1 =
1 adj( sI − A) det( sI − A)
(1)
式(1)中的 adj( sI − A) 和 det( sI − A) 可分别写成以下形式:
adj( sI − A) = H n −1s n −1 + H n − 2 s n − 2 + " + H 0 det( sI − A) = s + an −1s
故
Φ (t ) = α 0 (t ) I + α1 (t ) A + α 2 (t ) A2
⎡ −2tet + e 2t ⎢ = ⎢ −2(1 + t )et + 2e 2t ⎢ −2(2 + t )et + 4e 2t ⎣
(3t + 2)et − 2e 2t (3t + 5)et − 4e 2t (3t + 8)et − 8e 2t
n n −1
(2) (3) (4)
+ " + a0
,可得 将式(1)两边分别左乘 det( sI − A)( sI − A) ,并利用式(2)和(3)
Is n + an −1 Is n −1 + " + a0 I = H n −1s n + ( H n − 2 − AH n−1 ) s n − 2 + " + ( H 0 − AH1 )s − AH 0
e jt = a0 (t ) + a1 (t ) j , e − jt = a0 (t ) − a1 (t ) j
而
e jt = cos t + j sin t , e− jt = cos t − j sin t 因此, a0 (t ) = cos t , a1 (t ) = sin t 。由此得到状态转移矩阵 ⎡ cos t sin t ⎤ Φ (t ) = e At = a0 (0) I + a1 (t ) A = ⎢ ⎥ ⎣ − sin t cos t ⎦
现代控制理论第二章答案 舒欣梅

2-2 令⎥⎦⎤⎢⎣⎡=22211211a a a a eAt,由状态转移矩阵的定义)0()()0()(x t x e t x AtΦ==得, ⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-----12211222112112221121122a a a a e e a a a a e e t t t t 求解得到⎥⎦⎤⎢⎣⎡+-+---==Φ--------t ttt tt t t Ate eee ee e e et 22222222)( 由状态转移矩阵的性质)0(Φ= A 得:⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--+-+-==--------312042422202222t tttt tttt eeee ee e e A 复习状态转移矩阵的性质:(0)IΦ=;()()()t A t t A Φ=Φ=Φ ;121221()()()()()t t t t t t Φ±=ΦΦ±=Φ±Φ;11()(),()()t t t t --Φ=Φ-Φ-=Φ;2211()()()x t t t x t =Φ-;202110()()()t t t t t t Φ-=Φ-Φ-;[()]()kt kt Φ=Φ;若A B B A =则()A B tAt BtBt Atee ee e +==2-3(1)⎥⎦⎤⎢⎣⎡+-=-211s sA sI ()22122222222121(1)(1)()111(1)(1)(1)1111(1)(1)111(1)1(1)s s s s adj sI A sI A s s sI As s s s s s s s s -+⎡⎤⎢⎥+++⎡⎤-⎢⎥-===⎢⎥---+⎢⎥⎣⎦⎢⎥++⎣⎦⎡⎤+⎢⎥+++⎢⎥=⎢⎥--⎢⎥+++⎣⎦11()()t t tt tt e te te t L sI A teete --------⎡⎤+⎡⎤Φ=-=⎢⎥⎣⎦--⎣⎦2-4(1)求系数矩阵的特征根3,121-==λλ将其带入式(2-24)得:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡----tt t t t te e e e e e a a 333110414141433111所以,⎥⎥⎦⎤⎢⎢⎣⎡-=+==Φ--ttttAteee eA a I a et 331004141)( 2-5(2)求系数矩阵的特征根2,1,0321===λλλ根据公式0)(=-i i P A I λ求相应的特征向量为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡011,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡100,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-011得到⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==-011011011Q P,⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=0212110002121P 因此,⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡++-+-+=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-===Φ-t t ttt tttA Ate e e ee e eP e P et 0002121212102121212102121100021210000101101101)(2222212-6(1)求特征根2321===λλλ,因为系数矩阵为约当标准型,因此直接写出⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==Φtttt tt tJt ete ee t te e e t t t et 2222222220002110010211)(2-7(1)先求)(t Φ,采用拉式变换法,11111331411(1)(3)(1)(3)()[()]343(1)(3)(1)(3)3111311122221313222233133222221313t ttt t s ss s s s t L sI A L L s s s s s s e e e e s s s s L e s s s s -------⎡⎤⎢⎥⎡⎤-----⎡⎤⎢⎥Φ=-==⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥----⎣⎦⎡⎤⎢⎥--+--+⎢⎥----⎢⎥==⎢⎥⎢⎥--+⎢⎥----⎣⎦33313222tt t ee e⎡⎤⎢⎥⎢⎥⎢⎥--+⎢⎥⎣⎦再根据非齐次状态方程的解: 033()3()()3()033()3()()3()3()()(0)()131113111122222222(0)3313331312222222231122t t ttt t t t t t t t t t t t t t t t x t t x t B d e e e e e e e ex d e e e ee e eee e τττττττττττ--------=Φ+Φ-⋅⎡⎤⎡⎤--+--+⎢⎥⎢⎥⎡⎤=+⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥--+--+⎢⎥⎢⎥⎣⎦⎣⎦--=⎰⎰3331122(0)331312222tt t t t t t t e e e x e e e e e⎡⎤+⎢⎥⎡⎤-++⎢⎥⎢⎥-+⎢⎥⎣⎦--+⎢⎥⎣⎦2-8(1)先求)(t Φ,采用拉式变换法,1211112111112211()[()]222021002t tse t L sI A L L s s s s e s -----⎡⎤⎢⎥⎡⎤⎡⎤--+-+⎡⎤⎢⎥⎢⎥Φ=-===⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦⎢⎥-⎣⎦ 22111()()22TTeG T T e⎡⎤-+⎢⎥=Φ=⎢⎥⎣⎦2220222011111110124244()()2211110222TT T T T e T e eH T Bd d ee e ττττττττ⎡⎤⎡⎤-+-+-⎡⎤⎢⎥⎢⎥-+⎡⎤⎢⎥=Φ===⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥-⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦⎰⎰当1.0=T 时,离散化方程为:10.11070.0054(1)()()01.22140.1107x k x k u k ⎡⎤⎡⎤+=+⎢⎥⎢⎥⎣⎦⎣⎦或者当采样周期T 很小时,可采用()()G T TA I H T TB=+=得到10.1(0.1)0 1.20()0.1G H T ⎡⎤=⎢⎥⎣⎦⎡⎤=⎢⎥⎣⎦得到10.10(1)()()0 1.20.1x k x k u k ⎡⎤⎡⎤+=+⎢⎥⎢⎥⎣⎦⎣⎦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章 状态空间表达式的解
3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢
⎣⎡-=2010A (2) ⎥⎦
⎤
⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110
A (4) ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥
⎥⎥⎦⎤⎢⎢⎢
⎢⎣⎡=000010000100
0010
A (6)⎥
⎥⎥⎥⎦
⎤
⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:
(1) (2) (3) (4)
特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201
P
线性变换后的系统矩阵为:
(5)
为结构四重根的约旦标准型。
(6)
虽然特征值相同,但对应着两个约当块。
或}0
100010000{
])[()(1
111----⎥⎥
⎥⎥⎦
⎤⎢⎢⎢⎢
⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:
(1) (2)
特征方程为: 特征值为:
2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:
0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:
对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:
[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==11001000132
1
P P P P ,⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:
(3)
特征值为:
2,1321===λλλ。
即
(4)
3-2-3 试判断下列矩阵是否满足状态转移矩阵的条件,如果满足,试求对应的矩阵A 。
(1)⎥⎥⎥
⎦⎤⎢⎢⎢⎣⎡-=Φt t t t t sin cos 0cos sin 0001
)((2)⎥⎥⎦⎤⎢⎢⎣⎡-=Φ--t
t e e t 220)1(5.01)( (3)⎥⎥⎦⎤
⎢⎢⎣
⎡+--+--=Φ--------t t t
t
t t t
t e e e e e e e e t 22222222)((4)⎥
⎥⎦⎤
⎢⎢⎣
⎡++-+-+=Φ----t t t
t t t t t e e e e e e e e t 33335.05.025.025.05.05.0)(
【解】:
(1)
∴不满足状态转移矩阵的条件。
(2)
∴满足状态转移矩阵的条件。
由)()(t A t Φ=Φ
,得A A =Φ=Φ)0()0( 。
∴⎥⎦⎤⎢⎣
⎡-=⎥⎥⎦⎤⎢⎢⎣⎡-=Φ=⇒⎥⎥⎦
⎤⎢⎢⎣⎡-=Φ=----2010200)0(,200)(02222t t
t t t e e A e e t (3)
∴满足状态转移矩阵的条件。
(4)
∴满足状态转移矩阵的条件。
3-2-4 已知线性时变系统为x t t x
⎥⎦
⎤
⎢⎣⎡--=21
12 ,试求系统的状态转移矩阵。
【解】:
取)(*)()(*)(,21
12)(,21
12)(122122
211
1t A t A t A t A t t t A t t t A =⎥⎦
⎤
⎢
⎣⎡--=⎥⎦
⎤
⎢
⎣⎡--=得: 3-2-5 已知线性定常系统的状态方程为u x x
⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=103210 ,初始条件为⎥⎦
⎤
⎢⎣⎡-=11)0(x 试
求输入为单位阶跃函数时系统状态方程的解。
【解】:
3-2-6 已知线性定常系统的状态空间表达式为[]x y u x x
21,026510=⎥⎦
⎤
⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= ,已知
状态的初始条件为⎥⎦
⎤
⎢⎣⎡=1
0)0(x ,输入量为)0()(≥=-t e t u t
,试求系统的输出响应。
【解】:
3-2-7线性定常系统的齐次方程为)(t Ax x
= ,已知当⎥⎦
⎤
⎢⎣⎡-=21)0(x 时,状态方程的解为 ⎥⎥⎦
⎤⎢⎢⎣⎡-=--t
t e e t x 222)(;而当⎥⎦⎤⎢⎣⎡-=11)0(x 时,状态方程的解为⎥⎥⎦
⎤
⎢⎢⎣⎡-=--t t e e t x )(,试求: (1)系统的状态转移矩阵)(t Φ; (2)系统的系数矩阵A 。
【解】:
t e 212112-=-φφ,t e 2222122--=-φφ t e -=-1211φφ,t e --=-2221φφ
3-2-8 已知线性时变系统为⎥⎦
⎤
⎢⎣⎡-=⎥⎦
⎤
⎢⎣⎡=11)0(,010x x t x
,试求系统状态方程的解。
【解】:
对任意时间t 1和t 2有⎥⎦⎤
⎢⎣
⎡=⎥⎦⎤
⎢
⎣
⎡=2211010)(,010)(t t A t t A 得:)(*)()(*)(1221t A t A t A t A ≠
所以有
3-2-9 已知线性定常离散系统的状态空间表达式为 若)(1kT u 与)(2kT u 为同步采样时,且)(1kT u 是来自斜坡函数t 的采样,即t t u =)(1,)(2kT u 是来自指数函数t e t u -=)(2的采样。
试求系统的输出响应y (KT )。
【解】: 方法一:
利用Z 变换的方法求解:
=第一部分+第二部分
第二部分为:
所以第一部分的Z 反变换为: 所以第二部分的Z 反变换为: 方法二:
利用递推算法求解差分方程组: 特征方程为: 特征值为:
625.0,375.021==z z 。
⎥⎦⎤⎢⎣⎡-=1111P ,⎥⎦
⎤⎢⎣⎡-=-5.05.05.05.01P 利用∑=Φ+
Φ=1
-k 0
j 1)Hu(j)-j -(k (k)x(0))(k x
得:
3-2-10 已知连续系统的状态方程为: 系统的初始状态为⎥⎥⎦⎤
⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣
⎡201)0()0()0(321x x x
试求当控制序列为)1(2)(秒==T kT kT u 时离散系统的状态)(kT x 。
【解】:
利用递推算法求解差分方程组:
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==Φ011220001)1(1
G ,⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡---==Φ221422001)2(2
G
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==Φ421406001)3(3G ,⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡--==Φ4050410001
)4(4
G
3-2-11 已知离散系统的结构图如题3-2-11图所示,
题3-2-11图
(1)求系统离散化的状态空间表达式;
(2)当采样周期1.0=T 秒时,输入为单位阶跃函数,且初始条件为零时离散系统的输出)(kT y 。
【解】:
方法一:
①依据方框图求闭环脉冲传递函数: 当采样周期1.0=T 秒时
②依据闭环脉冲传递函数写出状态空间表达式: ③求零初始条件下单位阶跃输入的输出)(kT y 。
又因为输入为单位阶跃函数,且初始条件为零,所以 方法二:
系统中连续时间被控对象的传递函数为:
系统中连续时间被控对象的状态空间表达式为: 状态转移矩阵为:
⎥⎥⎦
⎤
⎢⎢⎣⎡=--t t e e 20
0(对角标准型也可直接写) 故被控对象的离散化状态方程为:
根据系统结构图,系统输入量为)(t r ,输出为)(t y ,而被控对象的输入)()()()()()(21t x t x t r t y t r t u +-=-=,所以系统的离散化方程为:
系统输出方程为:
令1.0=T 秒,离散化状态方程为:
当输入为单位阶跃函数,初始条件为零时离散系统的输出为:
)]()[()(11z Hu G zI CZ k y ---=可得。
或与方法一一样,利用∑-=--Φ+Φ=1
)()1()0()()(k j j Hu j k x k k x
一步一步地求。
3-2-12 线性时变系统的状态方程为u x e e x t
t ⎥⎦⎤⎢⎣⎡+⎥⎥⎦
⎤⎢⎢⎣⎡-=--0550)1(5055 ,求采样周期T=0.2秒时,系统的离散化方程。
【解】:
由于采样周期较小,可以采用近似离散化的方法。