机器人设计与应用专题
达芬奇机器人手术系统——原理、系统组成及应用

Ab s t r a c t :
Da Vi n i c Ro t o t i c S u r g i c a l S y s t e m i s a k i n d o f r o t o t o p e r a t i o n p l a t f o r m, t h e s u r g e o n t o r e mo t e l y c o n t r o l t h e e n d o s c o p e o p e r a t i o n
,
a b d o mi n a l s rg u e r y a n d o t h e r i f e l d s , t h e d o me s t i c s e v e r a l me d i c a l u n i t s i n t h e i n t r o d u c t i o n o r u h o s p i t a l h a s i n t r o d u c e d a Da Vi n c i
关 键 词: 达芬奇机器人手术系统
Da Vi ni c Ro t o t i c Sur gi c a l S ys t e m - Pr i nc i pl e , Co m pos i t i o n a nd Appl i c a t i o n o f S ys t e m
,
r o b o t o p e r a t i o n s y s t e m. T h i s p a p e r b r i e l f y i n t r o d u c e s he t r e p r e s e n t a t i v e o f t o d a y ’ s h i g h e s t l e v e l o p e r a t i o n r o b o t s y s t e m p r i n c i p l e
了解机器人(练习+答案)
第八章专题二了解机器人一、单选题1.当前机器人的广泛应用,表明信息技术的发展趋势是(D )。
A.巨型化B.虚拟化C.网络化D.智能化2.以下关于机器人的叙述,不正确的是( B )。
A.机器人是一种自动化设备B.机器人是一种能独立思考的机器C.机器人是一种具有高度灵活性的机器D.机器人具备一些与人或生物相似的智能能力3.机器人获取周围环境中的声、光、电等信息,主要靠的是(C )。
A.机械手B.驱动器C.传感器D.控制器4.航拍机器人属于( B )。
A.工业机器人B.公共服务机器人C.特种机器人D.个人服务机器人5.当代机器人家族中,用于生产制造的机器人称为(A )。
A.工业机器人B.服务机器人C.军用机器人D.特种机器人6.具有逻辑推理、判断和决策能力的机器人属于( C )。
A.示教型机器人B.感觉型机器人C.智能型机器人D.服务型机器人7.以下关于机器人的描述中,不正确的是(A )。
A.机器人已经超出了人类的集体智慧B.机器人的应用广泛,各行各业都可以用到C.可以用机器人代替人类从事危险作业,如高空焊接、高温炼钢等D.机器人是一种自动的、位置可控的、具有编程能力的多功能机械手8.达芬奇机器人可以用于胸外科、泌尿外科、及心脏手术等,其对应的应用领域是(B )。
A.教育B.医疗C.培训D.金融9.机器人可以应用于(A )。
①烹饪②手术③自动驾驶④电焊A.①②③④B.①②③C.②③④D.①③④10.按照机器人的应用分类,属于工业机器的人是( D )。
A.娱乐机器人B.导盲机器人C.家务机器人D.激光切割机器人。
小型多关节工业机器人设计

工业机器人 的主要技术规格参数
参数 - , 1 轴 轴 轴 轴 轴
结 构形式
数 控轴 数 最 大运 动 范 围R/ mm
多关节型式
5 轴 6 9 0
工 业 机 器 人 控
制 系 统 预 留 与 外 界
手部 负荷 质量/ k g 重复定位精 度/ mm 机械部 分重量/ k g 运动范 围 ( 。 ) 运动转速 ( 。 / s )
图2 手腕外形轴侧投影
多关节装配工业机器人本体结构设计中 ,突破机械
传 统 设 计 观 念 , 采 用 大 减 速 比 高 精 度 的 摆 线 减 速 机 ,通 过 伺 服 电动 机 直接 与 摆 线减 速 机相 联 接 ,驱
动工业机器人关节运动,改善工业机器人原有的传
通用机床研 究所所 长 赵 军
班
图3 十字交叉滚子轴承结构
]一 兰 = { = i \ l 6 o
。
l 5 O /
Z
。
小
1 ‘ 5 【 】 2 9 . \8 0
、
( 2 )模块 化 设 计 为扩 大开 发 出 的工 业机 器 人 自身 通 用性 ,适应 不 同 自动化 生 产线 的要 求 ,将 交
3 ±0 . O 5 1 2 0 3 2 0 1 8 0 2 6 0 3 0 0 7 2 0 1 5 0 1 3 0 2 0 0 3 6 0 3 6 0
设 备 相 连 接 的 各 类 I / 0接 口 ,如 : I / O P r e c e s s 插接头式 、
侧 投影 如 图2 所示 。
小型 多 关节 工 业 机 器 人采 用 自制 复合 型 、高精 度十字交叉滚子轴承如图3 所 示 ,因 轴 承 中 圆柱 滚 子在呈9 0 。 的V形 沟槽 滚 动 面 上 相互 垂 直 的 排 列 , 轴 承 可承 受 径 向 负荷 、轴 向负 荷及 倾 覆 力矩 等 所 有 方 向 的 负 荷 。 内 外 圈 的 尺 寸 最 大 限 度地 小 型 化 , 外 圈采 用两 体 分割 的 构造 ,轴 承预 紧 量 可调 整 ,通
智能家庭服务机器人设计
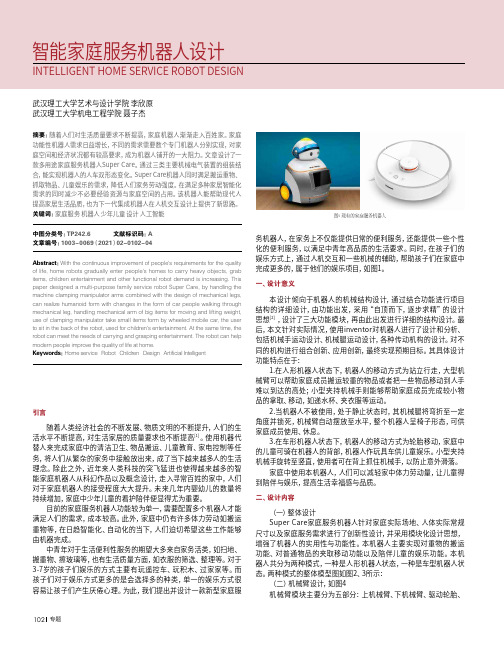
专题102摘要:随着人们对生活质量要求不断提高,家庭机器人渐渐走入百姓家。
家庭功能性机器人需求日益增长,不同的需求需要数个专门机器人分别实现,对家庭空间和经济状况都有较高要求,成为机器人铺开的一大阻力。
文章设计了一款多用途家庭服务机器人Super Care。
通过三类主要机械电气装置的组装结合,能实现机器人的人车双形态变化。
Super Care机器人同时满足搬运重物、抓取物品、儿童娱乐的需求,降低人们家务劳动强度。
在满足多种家居智能化需求的同时减少不必要经验资源与家庭空间的占用。
该机器人能帮助现代人提高家居生活品质,也为下一代集成机器人在人机交互设计上提供了新思路。
关键词:家庭服务 机器人 少年儿童 设计 人工智能中图分类号:TP242.6 文献标识码:A 文章编号:1003-0069(2021)02-0102-04Abstract:With the continuous improvement of people's requirements for the quality of life, home robots gradually enter people's homes to carry heavy objects, grab items, children entertainment and other functional robot demand is increasing. This paper designed a multi-purpose family service robot Super Care, by handling the machine clamping manipulator arms combined with the design of mechanical legs,can realize humanoid form with changes in the form of car people walking through mechanical leg, handling mechanical arm of big items for moving and lifting weight,use of clamping manipulator take small items form by wheeled mobile car, the user to sit in the back of the robot, used for children's entertainment. At the same time, the robot can meet the needs of carrying and grasping entertainment. The robot can help modern people improve the quality of life at home.Keywords:Home service Robot Children Design Artificial Intelligent 武汉理工大学艺术与设计学院 李欣原武汉理工大学机电工程学院 聂子杰引言随着人类经济社会的不断发展、物质文明的不断提升,人们的生活水平不断提高,对生活家居的质量要求也不断提高[1]。
地下综合管廊机器人自动巡检系统构成及应用

编者按:综合管廊智能巡检机器人系统是基于巡检机器人、导轨体系为基础的执行结构,集成地理信息、安全防护、物联网的数据采集传输系统,并通过人工智能、大数据和云计算等多项运算功能,最终实现巡检机器人的自动智慧运维。
它是计算机科学、智能建筑、仪器仪表、模式识别和控制技术高度发展的产物,也是衡量城市综合管廊运维能力等级的一个重要标志。
中建七局安装工程有限公司以郑州经济开发区综合管廊为依托,对综合管廊机器人自动巡检系统进行研究及应用,在机器人定位系统、“智慧线+机器人”智能运维平台获得多项专利、软著,形成城市综合管廊智能机器人巡检系统工法,综合管廊“智慧线+机器人”监控系统在科技成果评价中达到国内领先水平。
本期专题详细介绍了综合管廊智能巡检机器人系统在设计、施工中的布置与应用,希望能为类似工程提供借鉴。
卢春亭 杨林场 郭树仁 闫波 夏仲锐(中建七局安装工程有限公司 郑州 450053)摘要:随着自动化技术发展,管廊运维由传统的人工巡检逐步升级为以巡检机器人为对象的智能运维系统。
本文以郑州经济开发区综合管廊为例,详细介绍了管廊机器人自动巡检运维系统的构建组成,以及巡检运维的应用和经验,为类似工程提供参考借鉴。
关键词:巡检机器人 地下综合管廊 智能运维中图分类号:TU745.7 文献标识码:B 文章编号:1002-3607(2024)02-0059-04地下综合管廊机器人自动巡检系统构成及应用1 技术背景随着城市管线需求量的增加,我国各级政府陆续出台多项政策鼓励各地推进城市地下综合管廊建设,综合管廊建设的蓬勃发展促使其运维工作应运而生。
但城市综合管廊因其地下隐蔽性、复杂性和封闭性等特点,增加了运维管理的难度,传统形式的人工运维存在着人力资源耗费大、运维覆盖率低、运维成本高、人工运营安全环境差等缺陷,以致运营维护的费用占全生命周期费用的67%以上。
同时人工维护为主的综合管廊运维管理又存在信息缺失、信息集成度弱及信息管理成本居高不下等问题。
机器人机械设计课程设计
机器人机械设计课程设计一、课程目标知识目标:1. 学生能够理解并掌握机器人机械设计的基本原理,包括机械结构、运动学和动力学等基础知识。
2. 学生能够了解不同类型的机器人机械臂的设计特点,并能够分析其优缺点。
3. 学生能够运用所学的知识,设计简单的机器人机械结构,并解释其工作原理。
技能目标:1. 学生能够运用CAD软件进行机器人机械部件的绘制和建模,提升设计技能。
2. 学生能够运用仿真软件对所设计的机器人机械结构进行运动仿真,验证设计的可行性。
3. 学生能够运用工程图纸和报告撰写技巧,清晰表达自己的设计思路和结果。
情感态度价值观目标:1. 学生培养对机器人机械设计的兴趣和热情,提高对工程技术的认识和价值认同。
2. 学生培养团队合作意识,学会与他人合作解决问题,培养沟通与协作能力。
3. 学生培养创新思维和解决问题的能力,勇于尝试新方法,面对挑战不轻言放弃。
分析课程性质、学生特点和教学要求:本课程为机器人机械设计课程,旨在培养学生对机器人机械结构的理解和设计能力。
学生处于高中年级,具有一定的物理和数学基础,但对于机器人设计较为陌生。
因此,课程目标注重基础知识的学习和实际操作技能的培养。
教学要求注重理论与实践相结合,鼓励学生动手实践和团队合作,培养其创新思维和问题解决能力。
二、教学内容1. 机器人机械设计基础理论:- 机械结构组成与功能- 运动学基本原理- 动力学基本原理2. 机器人机械臂设计:- 机器人机械臂类型与结构特点- 机械臂运动范围与自由度- 机械臂设计与分析方法3. CAD软件应用:- CAD软件基本操作与使用技巧- 机器人机械部件绘制与建模- 机械结构装配与仿真4. 机器人机械设计实践:- 设计任务与要求- 团队合作与分工- 设计方案制定与优化5. 机器人机械设计案例分析:- 分析实际案例,了解设计过程与方法- 对比不同设计方案,探讨优缺点- 总结经验,提高自身设计能力教学内容安排与进度:1. 第1周:机器人机械设计基础理论2. 第2周:机器人机械臂设计3. 第3-4周:CAD软件应用与实践操作4. 第5-6周:机器人机械设计实践与案例分析5. 第7周:课程总结与成果展示教材章节与内容对应:1. 《机器人技术与应用》第3章:机器人机械结构设计2. 《CAD软件教程》第4-6章:CAD软件操作与应用3. 《机器人机械设计实例》第1-3章:案例分析与实践指导三、教学方法1. 讲授法:- 对于机器人机械设计的基础理论和概念,采用讲授法进行教学,确保学生掌握基本知识。
《创客教育之机器人教学对学生创新能力培养的实践与研究》创客专项微课题-课题申请

济宁市电化教育馆“十三五”教育技术研究课题课题申请·评审书课题类别: 创客教育专项微课题课题名称: 创客教育之机器人教学对学生创新能力培养的实践与研究申请单位: 汶上县杨店镇中心小学填表日期: 2017年 4月济宁市电化教育馆教育技术研究课题组制申请者的承诺与成果使用授权一、本人自愿申报济宁市电化教育馆教育技术研究规划课题。
本人认可所填写的教育技术研究规划课题申请·审批书为有约束力的协议,并承诺对所填写的课题申请·审批书所涉及各项内容的真实性负责,保证没有知识产权争议。
同意济宁市电化教育馆有权使用课题申请·审批书所有数据和资料。
课题申请如获准立项,在研究工作中,接受中央电化教育馆全国教育技术研究规划工作领导小组办公室及其委托各级电教部门的管理,并对以下约定信守承诺:1.遵守相关法律法规。
遵守我国《著作权法》和《专利法》等相关法律法规。
遵守我国政府签署加入的相关国际知识产权规定。
遵守《全国教育技术研究规划课题管理办法(修订)》及相关实施细则的规定。
2.遵循学术研究的基本规范。
科学设计研究方案,采用适当的研究方法,如期完成研究任务,取得预期研究成果。
3.尊重他人的知识贡献。
客观、公正、准确地介绍和评论已有学术成果。
凡引用他人的观点、方案、资料、数据等,无论曾否发表,无论是纸质或电子版,均加以注释。
凡转引文献资料,均如实说明。
4.恪守学术道德。
在研究过程中,不以任何方式抄袭、剽窃或侵吞他人学术成果,杜绝伪注、伪造、篡改文献和数据等学术不端行为。
在成果发表时,不重复发表研究成果。
在成果分享时,对课题主持人和参与者的各自贡献均在成果中以明确方式标明。
在成果署名时,不侵占他人研究成果,不在未参与研究的成果中挂名,不为未参与研究工作的人员挂名。
5.维护学术尊严。
保持学者尊严,增强公共服务,维护社会公共利益。
维护中央电化教育馆全国教育技术规划课题声誉,不以课题名义牟取不当利益。
专题六:机器人问题及其试题解析

专题六机器人问题及其试题解析一、机器人问题概述主要考查无人机等智能化机械涉及到的物理知识,比如电磁波的应用、一次能源和二次能源的定义。
太阳能的利用,以及能量的转化基础问题。
考查电磁感应的应用。
还有考查了热值、电动机效率和功等知识在生活中的应用与计算,综合性较强得物理问题。
扫地机器人为载体,考查流体压强与流速的关系,考查学生应用物理知识解决实际问题的能力。
也有的题考查压强和功的大小计算、速度公式及其应用,综合性较强,难度适中,关键是知道无人机停放在水平地面时,对地面产生的压力和它们的重力相等。
二、机器人问题解析【例题1】如图为四旋翼无人机,它的操控系统能够实现“一键起飞、一键返回、GPS悬停、规划航线自动飞行和自动跟踪”等功能,它的操控系统是靠传递信息的,无人机是利用电能来工作的,电能属于(选填“一次能源”或“二次能源”)。
答案:电磁波;二次能源。
解析:电磁波可以传递信息;可以从自然界直接获取的能源叫一次能源,不能从自然界直接获取必须通过一次能源的消耗才能得到的能源叫二次能源。
(1)四旋翼无人机,它的操控系统是靠电磁波传递信息的;(2)我们生活中所使用的电能都是通过其他形式的能转化而来的,是二次能源。
【例题2】某智能百叶窗的叶片上贴有太阳能板,在光照时发电,给电动机供电以调节百叶窗的开合。
该过程中发生的能量转换是()A.电能→机械能→光能B.光能→机械能→电能C.光能→电能→机械能D.机械能→电能→光能答案:C解析:太阳能电池板,把太阳能转化为电能,电动机把电能转化为机械能。
太阳能板,在光照时发电,即把太阳能转化为电能;电能供给电动机,转化为机械能,调节百叶窗的开合;故该过程中发生的能量转换是光能→电能→机械能。
【例题3】现在兴起的智能手机无线充电主要是运用电磁感应技术,当电源的电流通过充电底座中的送电金属线圈产生磁场,带有金属线圈的智能手机靠近该磁场就能接受磁场,产生电流,实现充电过程。
以下设备也是利用“磁生电”工作的是()A.电磁起重机 B.扬声器C.电烙铁 D.动圈式话筒答案:D解析:本题考查电磁感应的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NOT運算:取相反值 若輸入“真”,則輸出”假”, 若輸入“假”,則輸出” 真”
程式解說
• 先暫停程式2秒鐘,點亮PortB燈 • 接著進入迴圈,若Port1按鈕或 Port2按鈕被按下,則迴圈中止 • 緊接著立刻判斷是哪一個按鈕被按下
• 下圖為超音波感應器偵測到物體距離小於15cm時,條件為真
• 下圖為光感應器偵測到光線亮度大於50%時,條件為真
延伸討論
•程式編輯的技巧(copy-paste、捲動程式) •將程式改成超音波感測,這樣有路人站立
在路口時,不用按鈕也能自動感應,控制 燈號進入紅綠燈狀態 •將條件設定改成聲控的話,那麼路人站在 路口時,就可以用聲音的方式啟動控制 •也請同學們想想看還有哪些變化,可以擴 充控制的方式
電子搶答機
•引起動機--益智類型電視節目搶答 •問題說明--電子搶答機 •依照建構圖,將零件組合完畢 •說明使用邏輯物件控制迴圈
–下圖程式若按下Port1或Port2所接的按鍵(也就是按下 任何一個按鍵),無窮迴圈就會被中斷
使用邏輯物件控制迴圈
• 迴圈物件,可以設定為無窮迴圈(forever),下圖是設定 成當邏輯輸入為true時迴圈中止
選擇結構
•說明選擇結構概念 •設定各種感測器條件 •討論並實作
程式說明
•選擇結構(switch)最簡單的用法,就是判斷感測 器輸入的資料是否符合預期,例如上圖中就是判 斷接在Port1的按鈕感測器是否被壓下,若條件成 立則程式走上半部,反之則走下半部。
其他感測器設定
• 下圖為光感應器偵測到光線亮度大於50%時,條件為真
光感測到亮,則走上 半側路徑控制馬達左 轉;反之則走下半側 控制馬達右轉
參考程式
右馬達停止
左馬達運轉
無窮迴圈
虛擬碼
while(true) { if (LightSensor_detect_white) { motorB_stop ( ); motorC_run( ); } else { motorC_stop ( ); motorB_run( ); }
• 基本算模式 輸入->處理->輸出
• 圖控式程式發展環境
選擇結構: 若按下按鈕 責執行上半側的指令, 反之則走下半側
開 始
迴圈結構
物件 屬性
•程式虛擬碼
while(true) { if (touch_sensor_is_pressed) { beep(); show_picture_on_screen() }
•電機控制元件
–控制器 –伺服馬達 –感測器
•圖控式程式發展 環境
•積木元件
8
9
電機控制元件
• 包含NXT 控制器、伺 服馬達、感應器组成
• NXT控制器就像人的大 腦,伺服馬達好比人 的肌肉,提供動力, 感應器就像人的五官 ,偵測外界環境並轉 換成數位資料,再傳 送回NXT控制器,驅動 伺服馬達做出反應
}
• 討論單光感循跡演算法的特性,優缺點分析 • 演算法的特性--有限性、明確性 • 準備難度較高的圖形再試試看,並且討論失敗
的原因,歸納出演算法的缺點
進階挑戰地圖
雙光感循跡
•控制機器人以雙光感測 器循跡前進,且行經到 底線時能自動停止
機器人設計與應用專題
國立豐原高中 郭再興
學習目標
•了解機器人設計的基本原理 •能瞭解流程圖概念,以及如何應用於解決
問題。 •藉由圖控式程式發展環境,以及控制機器
人解決循跡問題,了解演算法流程控制的 基本輸入、處理步驟、輸出等基本概念
學習目標
•學習迴圈結構以及控制燈泡物件 •學習選擇結構以及按鈕感應器物件 •學習邏輯判斷物件(AND、OR、NOT、XOR) •練習分析問題,包括輸入、輸出、資料處
• 迴圈內的前兩個物件,負責偵測Port1按鈕、Port2按鈕是 否被按下
• 若按鈕被按下,|則綠色的線會送出true的訊號,由迴圈 內的第三個物件(邏輯物件)匯整後作出判斷(本例為OR)
常用的邏輯判斷
AND運算: 只有兩個輸入值都為“真”時結果才為 “真”;其他情況輸出結果都為“假”
OR運算: 兩個輸入值至少一個為“真”,輸出結 果則為“真”;否則輸出結果為“假”
理方式。
學習目標
•學習如何使用光感應器製作循跡機器人 •學習使用超音波感應器製作巡邏機器人 •以解決機器人克服難關問題為例,介紹如
何解決各種機器人挑戰關卡,並從中應用 解題概念,做為問題解決的基本核心策略 。
電腦解題教學工具
可程式化機器人
LEGO Mindstorms NXT
樂高機器人 NXT 9797
} •感測器若被壓下,則由喇叭播放音效,螢幕也會
顯示笑臉畫面,學生在此可學到基本程式撰寫方 法,以及三種基本流程
閃黃燈程式
•挑戰題目--製作閃黃燈程式 •展示事先錄製的閃黃燈影片 •依照建構圖,將零件組合完畢
範例程式說明
紅綠燈程式
•挑戰題目--製作紅綠燈程式 •展示事先錄製的紅綠燈影片 •依照建構圖,將零件組合完畢
– 若是Port1按鈕被按下,則點亮PortA燈 – 若是Port1按鈕未被按下,接著再判斷若Port2按鈕被按下,則點亮PortC燈
延伸討論
•問題1: 先判斷Port1按鈕,接著才判斷 Port2按鈕,是否不公平?
•問題2: 是否會出現誤判?
•是否有別的程式寫法 ?
三輪自走車
組合基本車身 前進後退
自走車
控制馬達前近 一小段距離
控制馬達後退 一小段距離
無窮迴圈
單光感循跡
挑戰問題:如何讓機器人使用一個光感應器, 控制兩個馬達,依循地上黑線前進 ?
單光感循跡演算法
演算法說明 step 1 光感應偵測地面亮度 step 2 若偵測到亮-左馬達出力 step 3 若偵測到暗-右馬達出力 不斷重複上面步驟,即可循跡前進
程式說明
程式執行原理,與之前的閃黃燈程式相同,依序是: • 點亮連接PortA的綠燈->等3秒鐘->熄滅PortA綠燈 • 點亮連接PortB的黃燈->等1秒鐘->熄滅PortB的黃燈 • 點亮連接PortC的紅燈->等4秒鐘->熄滅PortC的紅燈
閃黃燈變換紅綠燈
•使用感測器控制閃黃燈切換紅綠燈 •展示事先錄製的影片 •依照建構圖,將零件組合完畢