独立悬架导向机构的设计
独立悬架导向机构
独立悬架导向机构的设计一、设计要求对前轮独立悬架导向机构的要求是:1)悬架上载荷变化时,保证轮距变化不超过±4.Omm,轮距变化大会引起轮胎早期磨损。
2)悬架上载荷变化时,前轮定位参数要有合理的变化特性,车轮不应产生纵向加速度。
3)汽车转弯行驶时,应使车身侧倾角小。
在0.4g侧向加速度作用下,车身侧倾角不大于6°~7°,并使车轮与车身的倾斜同向,以增强不足转向效应。
4)汽车制动时,应使车身有抗前俯作用;加速时,有抗后仰作用。
对后轮独止:悬架导向机构的要求是:1)悬架上的载荷变化时,轮距无显著变化。
2)汽车转弯行驶时,应使车身侧倾角小,并使车轮与车身的倾斜反向,以减小过多转向效应。
此外,导向机构还应有够强度,并可靠地传递除垂直力以外的各种力和力矩。
目前,汽车上广泛采用上、下臂不等长的双横臂式独立悬架(主要用于前悬架)和滑柱摆臂(麦弗逊)式独立悬架。
下面以这两种悬架为例,分别讨论独立悬架导向机构参数的选择方法,分析导向机构参数对前轮定位参数和轮距的影响。
二、导向机构的布置参数1.侧倾中心双横臂式独立悬架的侧倾中心由如图6—24所示方式得出。
将横臂内外转动点的连线延长,以便得到极点P,并同时获得P点的高度。
将P点与车轮接地点N连接,即可在汽车轴线上获得侧倾中心W。
当横臂相互平行时(图6—25),P点位于无穷远处。
作出与其平行的通过N点的平行线,同样可获得侧倾中心W。
双横臂式独立悬架的侧倾中心的高度hw通过下式计算得出滑柱摆臂式独立悬架的侧倾中心由如图6—26所示方式得出。
从悬架与车身的固定连接点E 作活塞杆运动方向的垂直线并将下横臂线延长。
两条线的交点即为P点。
滑柱摆臂式悬架的弹簧减振器柱EG布置得越垂直,下横臂GD布置得越接近水平,则侧倾小心W就越接近地面,从而使得在车轮上跳时车轮外倾角的变化很不理想。
如加长下横臂,则可改善运动学特性。
麦弗逊式独立悬架侧倾中心的高度hw可通过下式计算式中2.侧倾中心在独立悬架中,前后侧倾中心连线称为侧倾轴线。
双横臂独立悬架导向-转向系统的分析与设计

双横臂独立悬架导向-转向系统的分析与设计一、问题描述及参数范围图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。
其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。
在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用ϕ、ψ表示,转向主销内倾角用β0表示。
转向传动机构采用由齿轮-齿条转向器驱动的断开式转向梯形机构GFE E'F'G'(F'与F,G'与G对称,未画出)。
其中,左轮转向梯形机构EFG由齿轮-齿条转向器输出齿条EE'、左轮转向横拉杆EF、左轮转向节臂FG及车架构成。
E、E'分别为转向器齿条上与左右转向横拉杆铰接的球铰中心,F为左轮转向横拉杆EF与左轮转向节臂FG铰接的球铰中心,G为左轮转向节臂FG与左轮转向主销BC连线的交点,且FG⊥BC。
另外,车轮轴线KH与转向主销BC交于H,与车轮中心面交于J。
图 1 双横臂悬架-转向系统机构示意图描述悬架ABCD导向机构运动学的机构几何参数主要有:上横臂杆长AB=h1,转向主销球铰中心距BC= h2,下横臂杆长CD=h3,上、下横臂的摆角α、ψ(横臂向外下倾时,取负值),转向主销内倾角β0。
为简便计,不考虑主销后倾角的影响,并假设上、下横臂与车架铰接的轴线均平行于车辆纵向,则图示导向机构ABCD的上、下横臂AB、CD和转向主销轴线BC 将始终在过前轮轴线的汽车横向垂直平面内运动。
在水平面俯视图中,描述EFG左轮转向梯形机构运动学的机构几何参数主要有:EE'=L1,EF= L2,FG= L3,车架上齿条移动方向线EE'与前轮轴线的偏移距Y(前轮轴线在前方时,取正值),转向节臂FG相对于汽车纵向的安装角α0。
另外,左右车轮的转向角分别用α、β表示。
某SUV汽车多连杆后独立悬架设计与分析本科毕业论文

某SUV汽车多连杆后独立悬架设计与分析摘要近年来,随着汽车工业的快速发展,人们对汽车的操纵稳定性和乘坐舒适性的要求越来越高,因此对汽车的悬架系统也提出了更高的要求。
多连杆式独立悬架以其综合指标过硬、兼顾操控性和行驶舒适性在内的多种特性受到广大消费者的青睐。
然而多年以来,结构复杂、成本高昂、舒适性较好的多连杆式独立悬架只用于豪华轿车,或少部分定位较高端的中高级别轿车。
伴随着汽车制造技术的不断提升,零部件单位生产成本逐步降低,汽车厂商们开始更多的在低端轿车上装备这种结构复杂、性能优异的悬架,以此来提高车辆在行驶过程中的综合表现,并在同级别车型中形成鹤立鸡群的效应。
我这次设计的奔驰GLK300的悬架系统正是符合大众的需求,采用多连杆式独立悬架。
本次设计的主要内容是:奔驰GLK300SUV的后悬架系统的设计,后悬架采用目前较为流行的多连杆式独立悬架系统。
减振器采用双作用液力减振器,并对其进行参数计算。
对导向机构和横向稳定杆进行结构计算及强度校核。
采用CATIA软件对多连杆式独立悬架的零件进行建模并对悬架进行装配。
同时采用CATIA软件对悬架的性能进行分析,论证悬架系统设计参数的合理正确性。
在这次设计中,采用了性能较好的多连杆式独立悬架系统,虽然多连杆式独立悬架还未广泛应用于中低端轿车,但随着成本的降低,此悬架系统将越来越多的得到使用。
通过CATIA软件对悬架系统的建模及对其进行仿真优化,验证了多连杆式独立悬架的优异性能。
因此,这次设计的悬架系统具有广泛的发展前景。
关键词:多连杆;独立悬架;仿真优化;CATIAA SUV multi-link independent rear suspension of automobiledesign and analysisAbstractIn recent years, with the rapid development of automobile industry, people on the handling stability and riding comfort of the increasingly high demand, so the car's suspension system is also put forward higher requirements. Multi-link independent suspension with its comprehensive index, consideration of different characteristics of excellent handling and ride comfort, favored by the vast number of consumers. However, over the years, complex structure, high cost, comfort good multi-link independent suspension is used only for luxury cars, or a few more high-end positioning in high-grade car. Along with the automobile manufacturing technology continues to improve, spare parts production costs per unit decrease gradually, the automobile manufacturers began more equipment of this structure in the low-end cars complex, excellent performance of suspension, in order to improve the comprehensive performance of vehicles in the process, and the effect of forming in the same stand head and shoulders above others don't models. Suspension system I the design of the Mercedes-Benz GLK300 is in line with the needs of the public, the multi-link independent suspension.The design of the main content is: the design of rear suspension system of the Mercedes-Benz GLK300SUV, rear suspension uses the popular multi-link independent suspension system. Damper adopts double acting hydraulic shock absorber, and parameter calculation of its. The guide mechanism and a transverse stable rod structure calculation and strength check. The components of CATIA software for multi-link independent suspension modeling and assembly of suspension. At the same time were analyzed by CATIA software performance of suspension, reasonable design parameter argumentation suspension system.In this design, the multi-link independent suspension system with better performance, although the multi-link independent suspension is not widely used in the low-end cars, but with lower costs, this suspension system will be more and more use. Through the CATIA software model of suspension system and simulation and optimization of its, verify themulti-link independent suspension performance. Therefore, the design of the suspension system has a broad development prospects.Keywords:Connecting rod;independent suspension ;Simulation optimization;CATIA目录引言 ....................................................................................................................................... - 7 -第1章概述 ..................................................................................................................... - 11 -悬架系统概述 ...................................................................................................................... - 11 -第2章悬架分类及选择................................................................................................. - 14 -2.1 非独立悬架 ................................................................................................................. - 14 -2.2 独立悬架 ..................................................................................................................... - 14 -2.2.1 横臂式悬挂系统 ........................................................................................... - 14 -2.2.2 多连杆式悬挂系统 ....................................................................................... - 15 -2.2.3 纵臂式悬挂系统 ........................................................................................... - 15 -2.2.4 烛式悬挂系统 ............................................................................................... - 15 -2.2.5 麦弗逊式悬挂系统 ....................................................................................... - 15 -2.2.6 主动悬挂系统 ............................................................................................... - 16 -2.3 辅助元件 ..................................................................................................................... - 16 -2.3.1 横向稳定器 ................................................................................................... - 16 -2.3.2 缓冲块 ........................................................................................................... - 17 -第3章悬架参数计算..................................................................................................... - 18 -3.1 参数选定 ..................................................................................................................... - 18 -3.1.1 自振频率 ....................................................................................................... - 18 -3.1.2 悬架刚度 ....................................................................................................... - 18 -3.1.3 悬架静挠度 ................................................................................................... - 18 -3.1.4 悬架动挠度 ................................................................................................... - 19 -第4章弹性元件的设计计算......................................................................................... - 20 -4.1 弹簧中径、钢丝直径、及结构形式 ......................................................................... - 20 -4.2 弹簧圈数 ..................................................................................................................... - 20 -第5章悬架导向机构设计............................................................................................. - 22 -5.1 导向机构设计要求 ..................................................................................................... - 22 -5.2 导向机构的布置参数 ....................................................................... 错误!未定义书签。
麦弗逊悬架设计

轿车前悬架设计姓名:学院:指导老师:学号:目录一、设计任务1.1整车性能参数1.2具体设计任务二、悬架的结构形式分析2.1对悬架提出的设计要求有2.2悬架分类2.1.1非独立悬架的结构特点以及优缺点2.1.2独立悬架的结构特点以及优缺点2.1.3独立悬架的分类2.1.4捷达轿车前悬架的选择三、悬架主要参数的确定f3.1悬架的静挠度cf3.2悬架的动挠度d3.3悬架的弹性特性3.4悬架侧倾角刚度及其在前、后轴的分配四、弹性元件的设计4.1弹簧参数的计算选择4.2空载时的刚度4.3满载时计算刚度4.4螺旋弹簧的选择及校核五、麦弗逊式独立悬架导向机构的设计5.1对前轮独立悬架导向机构的设计要求5.2对后轮轮独立悬架导向机构的设计要求5.3麦弗逊式独立悬架导向机构的布置参数5.3.1侧倾中心5.3.2侧倾轴线5.3.3纵倾中心5.3.4抗制动纵倾性(抗制动前俯角)5.4麦弗逊式独立悬架导向机构设计5.4.1导向机构受力分析六、减振器6.1分类6.2相对阻尼系数6.3减振器阻尼系数δ的确定6.3.1减振器阻尼系数s cm ψδ2=6.3.2麦弗逊式独立悬架减振器如图6.3.2.1所示,按照如图安装时,其阻尼系数δ6.3.3阻尼系数δ的确定6.4最大卸荷力o F 的确定6.4.1卸荷速度x ν的确定6.4.2最大卸荷力o F 的确定6.5筒式减振器工作缸直径D 的确定七、悬架结构元件7.1三角形下控制臂长度GB=362mm7.2减振器长度7.3螺旋弹簧的长度,自由高度0H八、悬架结构元件的尺寸8.1三角形下控制臂8.2减振器8.3固定架九、悬架装配图十、参考文献一、设计任务1.1整车性能参数:驱动形式 4×2 前轮最大爬坡度 35%轴距 2471mm 制动距离(初速30km/h)5.6m轮距前/后 1429/1422mm 最小转向直径 11m 整备质量 1060kg 最大功率/转速 74/5800kw/rpm空载时前轴分配负荷 60% 最大转矩/转速 150/4000N·m/rpm最高车速 180km/h 轮胎型号 185/60 R14 T手动挡5挡1.2具体设计任务(1)查阅汽车悬架的相关资料,确定捷达轿车前悬架的结构尺寸参数(2)确定车辆的纵倾中心,计算悬架摆臂的定位角,对导向机构进行受力分析。
悬架设计

悬架设计手册二.扭杆悬架扭杆式双横臂独立悬架,用扭杆作为弹性元件,简称为扭杆悬架。
2.1 扭杆悬架的典型结构2.1.1悬架的导向机构悬架的导向机构是一种四连杆机构,四连杆机构由上摆臂、下摆臂及主销构成。
图2-1为悬架系统结构简图,三角型DEF为悬架上摆臂,DE为上摆臂轴;三角型ABC为悬架下摆臂,AB为下摆臂轴;F为上球头销、C为下球头销FC构成转向桥的主销车轮跳动过程中,上摆臂、下摆臂各自绕它们的摆臂轴进行摆动。
M、N分别为转向梯型上的两点,M为转向梯型断开点,N为转向节臂与转向拉杆的连接点。
图2-1摆臂结构有两种:A形臂和一字臂,呈A字形或三角形的摆臂为A形臂;呈一字形的摆臂为一字臂。
上摆臂一般都是A形臂。
上下摆臂均为A形臂的称为双A形臂结构,四驱的车辆或四驱平台上的两驱车辆一般采用双A形臂,如:长丰猎豹、BJ2027皮卡;一般SUV车因考虑越野性能,其前悬架大多采用双A形臂,如:长城赛弗、五十铃竞技者、海拉克斯、华泰特拉卡等。
采用双A形臂的车辆不带推力杆。
另一种布置结构为:上摆臂是A形臂,下摆臂为一字臂。
两驱车辆一般采用该种结构。
如BJ1027皮卡、长城皮卡、田野皮卡等。
该种结构因下摆臂为一字臂必须设置推力杆。
2.1.2 上置扭杆与下置扭杆扭杆的安装型式主要有两种,一种为上置扭杆,一种为下置扭杆,见图2-2。
扭杆的上置与下置主要与整车及发动机布置有关,主要看它的布置空间。
采用上置扭杆的有:BJ6486轻客、长城赛弗、金杯海狮等;采用下置扭杆的有:BJ1027皮卡、长城皮卡、江铃皮卡、庆铃皮卡等。
图2-22.。
1。
3 双横臂轴的布置为了获得优良的性能,双横臂轴线在纵平面内和水平面内都有可能布置夹角,双横臂轴线在纵平面内形成的夹角为刹车点头角,在水平面内形成的夹角为斜置角。
图2-3列出了BJ1032、BJ0127、BJ6486的双横臂轴线的布置及其特点:图2-3图中M-M为上摆臂轴线,N-N为下摆臂轴线。
独立悬架导向机构的设计

汽车悬架--独立悬架导向机构的设计第五节独立悬架导向机构的设计一、设计要求对前轮独立悬架导向机构的要求是:1)悬架上载荷变化时,保证轮距变化不超过±4.Omm,轮距变化大会引起轮胎早期磨损。
2)悬架上载荷变化时,前轮定位参数要有合理的变化特性,车轮不应产生纵向加速度。
3)汽车转弯行驶时,应使车身侧倾角小。
在0.4g侧向加速度作用下,车身侧倾角不大于6°~7°,并使车轮与车身的倾斜同向,以增强不足转向效应。
4)汽车制动时,应使车身有抗前俯作用;加速时,有抗后仰作用。
对后轮独止:悬架导向机构的要求是:1)悬架上的载荷变化时,轮距无显著变化。
2)汽车转弯行驶时,应使车身侧倾角小,并使车轮与车身的倾斜反向,以减小过多转向效应。
此外,导向机构还应有够强度,并可靠地传递除垂直力以外的各种力和力矩。
目前,汽车上广泛采用上、下臂不等长的双横臂式独立悬架(主要用于前悬架)和滑柱摆臂(麦弗逊)式独立悬架。
下面以这两种悬架为例,分别讨论独立悬架导向机构参数的选择方法,分析导向机构参数对前轮定位参数和轮距的影响。
二、导向机构的布置参数1.侧倾中心双横臂式独立悬架的侧倾中心由如图6—24所示方式得出。
将横臂内外转动点的连线延长,以便得到极点P,并同时获得P点的高度。
将P点与车轮接地点N连接,即可在汽车轴线上获得侧倾中心W。
当横臂相互平行时(图6—25),P点位于无穷远处。
作出与其平行的通过N点的平行线,同样可获得侧倾中心W。
双横臂式独立悬架的侧倾中心的高度hw通过下式计算得出滑柱摆臂式独立悬架的侧倾中心由如图6—26所示方式得出。
从悬架与车身的固定连接点E 作活塞杆运动方向的垂直线并将下横臂线延长。
两条线的交点即为P点。
滑柱摆臂式悬架的弹簧减振器柱EG布置得越垂直,下横臂GD布置得越接近水平,则侧倾小心W就越接近地面,从而使得在车轮上跳时车轮外倾角的变化很不理想。
如加长下横臂,则可改善运动学特性。
轻型汽车麦弗逊独立悬架的导向机构设计
l 一 5 )
5 m m
( 图卜3 )
9。
( 图卜4 )
1 . 5 。
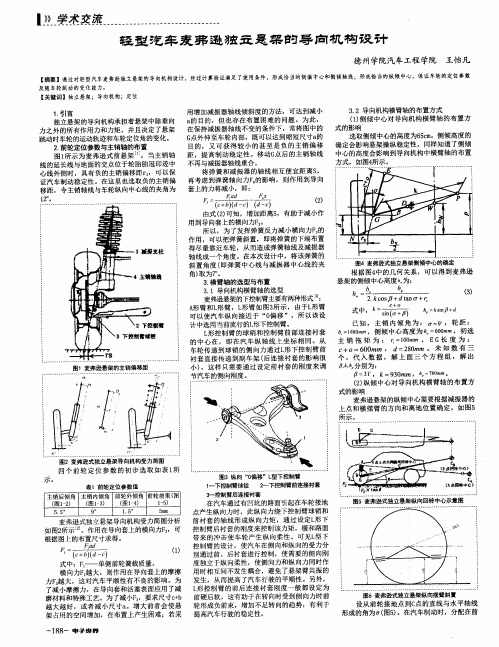
在汽车通 过有凹坑的路面 引起 在车轮接地
点产生 纵向力时 ,此 纵向力绕下控 制臂球销和 前 衬套 的轴线 形成纵 向力矩 ,通过 设 定L 形 下 控 制臂后衬套 的刚度来控制 该力矩,缓和路面 带来 的冲击使 车轮产 生纵 向柔性 。可 见L 型 下 控制臂 的设 计,使汽车在侧 向和纵 向的受力分 别通过前 、后衬套进行控 制,使需要 的侧 向刚 度独立 于纵向柔性 ,使侧 向力和纵 向力同时作 用时相 互间不发生耦合 ,避免 了悬架 臂共振 的 发生 ,从而提 高了汽 车行驶 的平 顺性。另外 , L 形控制 臂的前 后连接 衬套 刚度 一般都 设定为 图6麦弗逊 式独立悬架纵向摆臂斜置 前硬 后软 ,这 有助 于在转 向时受到侧 向力 时前 设 从前轮 接地 点到c 点的直线 与水 平轴线 轮 形成负前束 ,增加不足转 向的趋势 ,有利 于 形成 的角为 ( 图5 ) 。在汽 车制动时 ,分配 在前 提高汽车行驶的稳定性 。 = .ຫໍສະໝຸດ . 丽 d一 南
,
,
=
图2麦弗逊式独立悬架导 向机构 受力简图
四个 前轮 定位 参 数 的初 步 选 取 如表 1 所
示。
表 1前轮定位参数值 主销后倾角 主销 内倾角 前轮外倾角 前轮前束 ( 图
( 图1 - 2 )
5 . 5 。
图3纵向 ‘ ‘ 0 偏 移”L 型下控制臂 1 —下控制臂球铰 2 一下控制臂前连接衬套
图 1麦弗逊悬架 的主销偏移距
… … … … … … … 一 … … … … … …
汽车悬架设计方案
第二节 悬架结构形式分析
四、弹性元件分析 四.弹性元件结构分析
形式 特点
钢板弹簧 多片 变厚少片
螺旋 扭杆 弹簧 弹簧
单位质量贮 能量 质量 簧下质量 悬架弹性特 性 悬架结构 维修与保养 寿命④ 制造要求
最小
大 大 线性
简单 方便③ 短 不高
←—
较小① 较小 ←—
←— ←—③ ←— ←—
较小 ←—
第二节 悬架结构形式分析
五、辅助元件分析
2. 缓冲块
仅用来限制悬架最大行程的缓冲块,用半个椭圆 形橡胶硫化到钢板上制成。 兼有辅助弹性元件作用的缓冲块,用多孔聚氨脂 制作。它的特点是强度高、耐磨。
第三节 悬架主要参数的确定
一、悬架第静三节挠悬 度架fc主要参数的确定
1. 定 一、fc
1.fc定义:
2. 三种匹配方式
3)前、后轮独立——橡胶衬套
因橡胶衬套横截面方向上,按对角线方向开有楔形孔。 结果在不同方向衬套的刚度不一样。即:在汽车纵轴 线方向衬套的刚度小;衬套的纵向刚度大;衬套的总 扭转刚度大 b、c两项大的原因是:
转向行驶时,车轮与地面之间作用有侧向力FY1、 FY2 →简化作用到衬套上的力F1、F2和力矩M1、 M2→在F1和F2作用下衬套内、外侧相对移动,同 时处于橡胶衬套内径处的金属隔套突肩压紧橡胶 衬套,使之纵向刚度↑,扭转刚度↑。→减轻轴转 向效应,操纵稳定性好。
单横臂式 单 纵 臂 单 斜 臂 麦弗逊式 扭 转 梁 随 动
式
式
臂式
特性 侧轻中心高度①、 车轮相对车身跳 动时,车轮定位 参数的变化②
轮距③
悬架侧倾角刚度
④
横向刚度⑤ 占用空间尺寸⑥
结构 成本 轴距
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车悬架--独立悬架导向机构的设计第五节独立悬架导向机构的设计一、设计要求对前轮独立悬架导向机构的要求是:1)悬架上载荷变化时,保证轮距变化不超过±4.Omm,轮距变化大会引起轮胎早期磨损。
2)悬架上载荷变化时,前轮定位参数要有合理的变化特性,车轮不应产生纵向加速度。
3)汽车转弯行驶时,应使车身侧倾角小。
在0.4g侧向加速度作用下,车身侧倾角不大于6°~7°,并使车轮与车身的倾斜同向,以增强不足转向效应。
4)汽车制动时,应使车身有抗前俯作用;加速时,有抗后仰作用。
对后轮独止:悬架导向机构的要求是:1)悬架上的载荷变化时,轮距无显著变化。
2)汽车转弯行驶时,应使车身侧倾角小,并使车轮与车身的倾斜反向,以减小过多转向效应。
此外,导向机构还应有够强度,并可靠地传递除垂直力以外的各种力和力矩。
目前,汽车上广泛采用上、下臂不等长的双横臂式独立悬架(主要用于前悬架)和滑柱摆臂(麦弗逊)式独立悬架。
下面以这两种悬架为例,分别讨论独立悬架导向机构参数的选择方法,分析导向机构参数对前轮定位参数和轮距的影响。
二、导向机构的布置参数1.侧倾中心双横臂式独立悬架的侧倾中心由如图6—24所示方式得出。
将横臂内外转动点的连线延长,以便得到极点P,并同时获得P点的高度。
将P点与车轮接地点N连接,即可在汽车轴线上获得侧倾中心W。
当横臂相互平行时(图6—25),P点位于无穷远处。
作出与其平行的通过N点的平行线,同样可获得侧倾中心W。
双横臂式独立悬架的侧倾中心的高度hw通过下式计算得出滑柱摆臂式独立悬架的侧倾中心由如图6—26所示方式得出。
从悬架与车身的固定连接点E 作活塞杆运动方向的垂直线并将下横臂线延长。
两条线的交点即为P点。
滑柱摆臂式悬架的弹簧减振器柱EG布置得越垂直,下横臂GD布置得越接近水平,则侧倾小心W就越接近地面,从而使得在车轮上跳时车轮外倾角的变化很不理想。
如加长下横臂,则可改善运动学特性。
麦弗逊式独立悬架侧倾中心的高度hw可通过下式计算式中2.侧倾中心在独立悬架中,前后侧倾中心连线称为侧倾轴线。
侧倾轴线应大致与地面平行,且尽可能离地面高些。
平行是为了使得在曲线行驶时前、后轴上的轮荷变化接近相等,从而保证中性转向特性;而尽可能高则是为了使车身的侧倾限制在允许范围内。
然而,前悬架侧倾中心高度受到允许轮距变化的限制且几乎不可能超过150mm。
此外,在前轮驱动的车辆中,由于前轿轴荷大,且为驱动桥,故应尽可能使前轮轮荷变化小。
因此,独立悬架(纵臂式悬架除外)的侧倾中心高度为:前悬架0~120mm;后悬架80~150mm。
设计时首先要确定(与轮距变化有关的)前悬架的侧倾中心高度,然后确定后悬架的侧倾中心高度。
当后悬架采用独立悬架时,其侧倾中心高度要稍大些。
如果用钢板弹簧非独立悬架时,后悬架的侧倾中心高度要取得更大些。
3.纵倾中心双横臂式悬架的纵倾中心可用作图法得出,见图6—27。
自铰接点E和G作摆臂转动轴C和D的平行线,两线的交点即为纵倾中心。
滑柱摆臂式悬架的纵倾中心,可由E点作减振器运动方向的垂直线,该垂直线与过G点的摆臂轴平行线的交点即为纵倾中心OV,,如图6—28所示。
4.抗制动纵倾性(抗制动前俯角)抗制动纵倾性使得制动过程中汽车车头的下沉量及车尾的抬高量减小。
只有当前、后悬架的纵倾中心位于两根车桥(轴)之间时,这一性能方可实现,如图6—29所示。
5.抗驱动纵倾性(抗驱动后仰角)抗驱动纵倾性可减小后轮驱动汽车车尾的下沉量或前轮驱动汽车车头的抬高量。
与抗制动纵倾性不同的是,只有当汽车为单桥驱动时,该性能才起作用。
对于独立悬架而言,是纵倾中心位置高于驱动桥车轮中心,这一性能方可实现。
’6.悬架摆臂的定位角独立悬架中的摆臂铰链轴大多为空间倾斜布置。
为了描述方便,将摆臂空间定位角定义为:摆臂的水平斜置角α,悬架抗前俯角β,悬架斜置初始角θ,如图6—30所示。
三、双横臂式独立悬架导向机构设计1.纵向平面内上、下横臂的布置方案上、下横臂轴抗前俯角的匹配对主销后倾角的变化有较大影响。
图6—31给出了六种可能布置方案的主销后倾角λ值随车轮跳动的曲线。
图中横坐标为λ值,纵坐标为车轮接地中心的垂直位移量。
各匹配方案中β1、β2角度的取值见图注,其正负号按右手定则确定。
为了提高汽车的制动稳定性和舒适性,一般希望主销后倾角的变化规律为:在悬架弹簧压缩时后倾角增大;在弹簧拉伸时后倾角减小,用以造成制动时因主销后倾角变大而在控制臂支架上产生防止制动前俯的力矩。
分析图6—31中λ的变化曲线可知,第4、第5方案的λ变化规律为压缩行程λ减小,拉伸行程λ增大,这与所希望的规律正好相反,因此不宜用在汽车前悬架中;第3方案虽然主销后倾角的变化最小,但其抗前俯的作用也小,所以现代汽车中也很少采用;第1、2、6方案的主销后倾角变化规律是比较好的,所以这三种方案在现代汽车中被广泛采用。
2.横向平面内上、下横臂的布置方案比较图6—32a、b、c三图可以清楚地看到,上、下横臂布置不同,所得侧倾中心位置也不同,这样就可根据对侧倾中心位置的要求来设计上、下横臂在横向平面内的布置方案。
3.水平面内上、下横臂动轴线的布置方案上、下横臂轴线在水平面内的布置方案有三种,如图6—33所示。
下横臂轴M—M和上横臂轴N—N与纵轴线的夹角,分别用α1和α2来表示,称为导向机构上、下横臂轴的水平斜置角。
一般规定,轴线前端远离汽车纵轴线的夹角为正,反之为负,与汽车纵轴线平行者,夹角为零。
为了使轮胎在遇到凸起路障时能够使轮胎一面上跳,一面向后退让,以减少传到车身上的冲击力,还为了便于布置发动机,大多数前置发动机汽车的悬架下横臂轴M—M的斜置角。
,为正,而上横臂轴N—N的斜置角α2则有正值、零值和负值三种布置方案,如图6—33中的a、b、c所示。
上、下横臂斜置角不同的组合方案,对车轮跳动时前轮定位参数的变化规律有很大影响。
如车轮上跳、下横臂斜置角αl为正、上横臂斜置角α2为负值或零值时,主销后倾角随车轮的上跳而增大。
如组合方案为上、下横臂斜置角α1、α2都为正值,如图6—33a所示,则主销后倾角随车轮的上跳较少增加甚至减少(当α1<α2时)。
至于采取哪种方案为好,要和上、下横臂在纵向平面内的布置一起考虑。
当车轮上跳、主销后倾角变大时.车身卜的悬架支承处会产生反力矩,有抑制制动时前俯的作用。
但主销后倾角变得太大时,会使支承处反力矩过人,同时使转向系统对侧向力十分敏感,易造成车轮摆振或转向盘上力的变化。
因此,希望轿车的主销后倾角原始值为-1°一+2°。
当车轮上跳时,悬架每压缩lOmm,主销后倾角变化范围为10′一40′。
为了综合1上述要求,选择恰当的抗前俯角,国外已根据设计经验制定出一套列线图,如图6—34所示。
该图由三组线图组成:图6—34a为汽车在不同减速度时(以重力加速度g 的百分数表示),前轮上方车身下沉量f1,与抗前俯率ηd的关系;图6—34b,为下横臂摆动轴线与水平线夹角β1不相同时,主销后倾角λ的变化;率dλ/df1,与抗前俯率的关系;图6—34c为不同球销中心距时,主销后倾角λ的变化率dλ/df1与上、下横臂摆动轴线夹角(β2—β1)的关系。
运用此图的步骤如下:先根据设计的允许前俯角(在0.5g时为1°~3°)确定f1,然后找到相应的ηd,并在图6—34b上初选β1,求出主销后倾角变化率(推荐悬架每压缩lOmm时为10′一40′).如超出范围,即重新选β1,,直至达到要求为止。
接着可用图6—34c,先选定球销中心距,从图6—34b所定的dλ/df1值与初选的球销中心距在图上沿虚线所示的路线找到上、下横臂的夹角(β2—β1),如布置上允许即认为初选成功。
此图适用于轴距2.8~3.2m,质心高为0.5 8~0.6m的轿车。
4.上、下横臂长度的确定双横臂式悬架的上、下臂长度对车轮上、下跳动时前轮的定位参数影响很大。
现代轿车所用的双横臂式前悬架,一般设计成上横臂短、下横臂长。
这一方面是考虑到布置发动机方仙。
另一方面也是为了得到理想的悬架运动特性。
图6—35为下横臂长度l1保持原车值不变,,改变上横臂长度l2,使l2/l1,分别为0. 4,0.6,0.8,1.0,1.2时计算得到的悬架运动特性曲线。
其中Z—By(1/2轮距)为车轮接地点在横向平面内随车轮跳动的特性曲线。
由图可以看出,当上、下横臂的长度之比为0.6时,By曲线变化最平缓;l2/l1增大或减小时,By曲线的曲率都增加。
图中的Z—δ和Z—γ分别为车轮外倾角和主销内倾角随车轮跳动的特性曲线。
当l2/l1=1.0时,δ和γ均为直线并与横坐标垂直,这时,δ和γ在悬架运动过程中保持定值。
设计汽车悬架时,希望轮距变化要小,以减少轮胎磨损,提高其使用寿命,因此应选择l2/l1在0.6附近;为保证汽车具有良好的操纵稳定性,希望前轮定位角度的变化要小,这时应选择l2/l1在1.0附近。
综合以上分析,该悬架的l2/l1应在0.6~1.0范围内。
美国克莱斯勒和通用汽车分司分别认为,上、下摆臂长度之比取0.7和0.66为最佳。
根据我国轿车设计的经验,在初选尺寸时, l2/l1l取0.65为宜。
四、麦弗逊式独立悬架导向机构设计1.导向机构受力分析分析如图6—36a所示麦弗逊式悬架受力简图可知,作用在导向套上的横向力F3,可根据图上的布置尺寸求得式中,F1为前轮上的静载荷F1′减去前轴簧下质量的1/2。
力F3越大,则作用在导向套上的摩擦力F3f越大(f为摩擦因数),这对汽车子顺性有不良影响。
为了减小摩擦力,在导向套和活塞表面应用了减磨材料和特殊工艺。
由式(6—28)可知,为了减小力F,,要求尺寸c 十b越大越好,或者减小尺寸a。
增大尺寸c+b使悬架占用空间增加,在布置上有困难。
若采用增加减振器轴线倾斜度的方法,可达到减小尺寸。
的目的,但也存在布置困难的问题。
为此,在保持减振器轴线不变的条件下,常将图中的G点外伸至车轮内部,既可以达到缩短尺寸。
的目的,又可获得较小的甚至是负的主销偏移距,提高制动稳定性。
移动G点后的主销轴线不再与减振器轴线重合。
由图6—36b可知,将弹簧和减振器的轴线相互偏移距离s,再考虑到弹簧轴向力F6的影响,则作用到导向套上的力将减小,可用下式计算由式(6—29)可知,增加距离s,有助于减小作用到导向套上的横向力F3。
有时为了发挥弹簧反力减小横向力F3的作用,还将弹簧下端布置得尽量靠近车轮,从而造成弹簧轴线及减振器轴线成一角度。
这就是麦弗逊式悬架中,主销轴线、滑柱轴线和弹簧轴线不共线的主要原因。
2.摆臂轴线布置方式的选择麦弗逊式悬架的摆臂轴线与主销后倾角的匹配影响汽车的纵倾稳定性,图6—37中,C 点为汽车纵向平面内悬架相对于车身跳动的运动瞬心。