一种基于移动机器人行为的人员疏散的元胞自动机模型
基于元胞自动机人员疏散模型的分析研究
M , . c +'
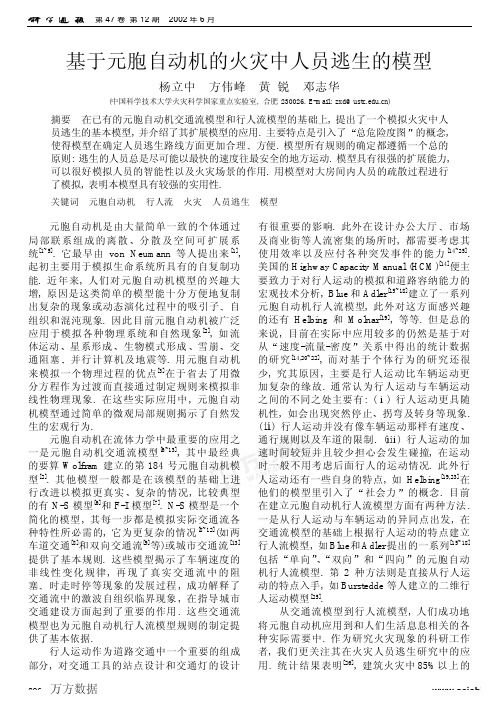
图 2 人员 下一步可 能运动 的方 向和概率
( 1 ) 网格位置吸引力概率 将火灾发生 的区域 设定为一个二 维空间 . 建 立模型 . 将 所研究 的 二维空间划分为大 小相 同的若干 网格 . 每个 网格 为~个元胞 . 所有元 ‰ = ( 3 ) 胞共 同构建 了元胞 空间。每个元胞空 间容纳一个人 , 根据人的体积投 式中 : d ( i , j ) —— 网格 ) 到疏散 出 口的距离 , m a x d ( i , j ) ——距离 出 影 大小 . 将 元胞大 小设立 为 0 . 5 m * 0 . 5 m I S l 最大的 网格距离值 . mi n d O , j ) ——距离 出口最小 的网格距离值 。距 元 胞空间规定 . 每个元 胞每个 时刻只存在三 种状态 : 一 被建筑物 其位置 吸引力概率越 大 . 反之距离疏散 出 口 或障碍 物占据 , 二被人 员占据 . 三为空。 元胞 的所设定的属性描述 了火 离 疏散出 口越近 的网格 .
l
l ■
i
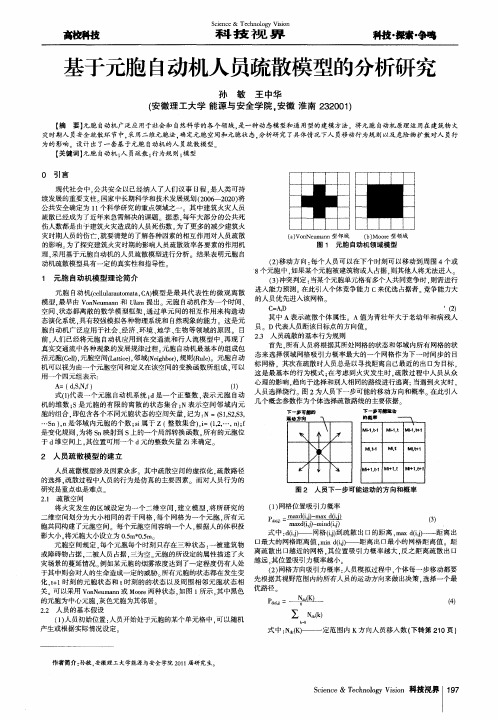
( a ) V o n N e u ma n 领域
图 1 元胞 自动机领域模型
( 2 ) 移 动方 向: 每个 人员可 以在 下个时刻可 以移动到周 围 4 个或 8 个元胞 中 . 如果某个元胞被建筑物或人 占据 . 则其他人将无法进入 1 元 胞 自 动机 模 型 理 论 简 介 ( 3 ) 冲突判定 : 当某个元胞单元格有多个人共 同竞争时 , 则需进行 进入能力 预测 。 在此 引入个体竞争能力 C来优选 占据者 竞 争能力 大 元胞 自动 机f c e l l u l a r a u t o ma t a . C A ) 模型是 最具代 表性 的微观 离散 的人员优 先进入该 网格 模型 , 最早 由 V o n N e u m a n n和 U l a m 提 出。元胞 自动机作为一个时间 、 C = A。 D ’( 2 ) 空间、 状 态都离散的数学模 型框架 . 通过单 元 间的相 互作用来构 造动 其 中 A表示疏散个体 属性。A值 为青壮年大 于老幼 年和病残人 态演化系统 . 具有较强模拟各种物理系统和 自 然现象 的能 力 这是元 员 D代表 人员距 该 目 标 点的方 向值 胞 自动机 广泛应用于社会 、 经济、 环境 、 地学、 生物 等领域 的原 因。 目 2 . 3 人员疏散 的基本行为规则 前. 人们 已经将元胞 自 动机 应用到在交通 流和行人 流模型 中 . 再 现了 首先 . 所有人员将根据其所处 网格 的状态和邻域 内所有 网格 的状 真实交通流 中各种现象 的发展规律过程 元胞 自动机最基本的组成包 态来选 择领域网格吸 引力概率最大 的一 个 网格作为下一 时间步的 目 括元胞( C e l i ) , 元胞空 间( L a t t i c e ) , 邻域( N e i g h b o r ) , 规则 ( R u 1 e ) 。元胞 自动 标 网格 .其次在疏散时人员总是以寻找距离 自己最近的出 口为 目标 . 机可 以视为 由一个元胞空间和定义在该空间的变换 函数所组成 . 可以 这是最基本 的行为模式 : 在 考虑到火灾发生 时 . 疏散过程 中人员从众 用 一 个 四元 组 表 示 : 心理 的影 响. 趋 向于选择和别人相 同的路线进行逃离; 当遇到火灾时 . A =【 d , S , N, f ) ( 1 ) 人员选择绕行 。 图 2为人 员下一 步可能 的移动方 向和概率。 在此引入 式( 1 ) 代表一 个元胞 自 动机 系统 ; d 是一 个正整数 , 表示 元胞 自动 几个概念参数作为个体选择疏散路线 的主要依据。 机 的维数 : s 是元 胞的有 限的离散 的状态 集合 : N表示空 间邻域 内元 下一簪" i i / l l  ̄ 下一 可蘸鼍曲 胞的组合 , 即包含各个不 同元胞状态 的空 间矢量 , 记为 : N=f s 1 , s 2 , s 3 , S n) , n 是邻 域 内元胞 的个数 ; s i 属 于 z( 整数集 合) , i =( 1 , 2 , …, n ) ; f M¨ . t . 1 MI - 1 . t M¨ . ' | 是变化规则 . 为将 s n 映射到 s 上的一个局 部转换 函数 所有 的元 胞位 于d 维空间上 。 其位置可用一个 d 元 的整数 矢量 z i 来确定 。
基于元胞自动机的火灾中人员逃生的模型
896www.scichina基于元胞自动机的火灾中人员逃生的模型杨立中 方伟峰 黄 锐 邓志华(中国科学技术大学火灾科学国家重点实验室, 合肥 230026. E-mail: zxd@)摘要 在已有的元胞自动机交通流模型和行人流模型的基础上, 提出了一个模拟火灾中人员逃生的基本模型, 并介绍了其扩展模型的应用. 主要特点是引入了的概念,使得模型在确定人员逃生路线方面更加合理分散及空间可扩展系统[1~5]. 它最早由von Neumann 等人提出来[1],起初主要用于模拟生命系统所具有的自复制功能. 近年来, 人们对元胞自动机模型的兴趣大增, 原因是这类简单的模型能十分方便地复制出复杂的现象或动态演化过程中的吸引子星系形成雪崩并行计算机及地震等. 用元胞自动机来模拟一个物理过程的优点[3]在于省去了用微分方程作为过渡而直接通过制定规则来模拟非线性物理现象. 在这些实际应用中, 元胞自动机模型通过简单的微观局部规则揭示了自然发生的宏观行为.元胞自动机在流体力学中最重要的应用之一是元胞自动机交通流模型[6~13], 其中最经典的要算Wolfram 建立的第184号元胞自动机模型[2]. 其他模型一般都是在该模型的基础上进行改进以模拟更真实时走时停等现象的发展过程, 成功解释了交通流中的激波自组织临界现象, 在指导城市交通建设方面起到了重要的作用. 这些交通流模型也为元胞自动机行人流模型规则的制定提供了基本依据.行人运动作为道路交通中一个重要的组成部分, 对交通工具的站点设计和交通灯的设计有很重要的影响. 此外在设计办公大厅速度-流量-密度) 行人运动更具随机性, 如会出现突然停止) 行人运动并没有像车辆运动那样有速度) 行人运动的加速时间较短并且较少担心会发生碰撞, 在运动时一般不用考虑后面行人的运动情况. 此外行人运动还有一些自身的特点, 如Helbing [19,23]在他们的模型里引入了的概念. 目前在建立元胞自动机行人流模型方面有两种方法.一是从行人运动与车辆运动的异同点出发, 在交通流模型的基础上根据行人运动的特点建立行人流模型, 如Blue 和Adler 提出的一系列[15~18]包括双向四向死亡者是由于没能及时逃出火灾现场而吸入了烟尘及有毒气体而致死的, 2000年2512新疆克拉玛依市友谊宫特大火灾(330人死亡)都是血的惨痛的例子, 因此对火灾中人员逃生现象和规律的研究直接关系到人员的生命安全问题.目前对火灾中人员逃生的研究主要集中在:() 对人员在火灾中逃生行为的研究, 如研究人员对火灾的早期反应[30], 时间压力对人员逃生的影响[31]等等. 这些研究从不同方面得到了很多理论结果并在实际应用中取得了一定的成效. 总的来说, 目前一个明显的趋势就是未来的模型将包含更多的行为细节.而这方面的表现将很大程度上依赖于建立模型所使用的方法. 现有的一些连续方程模型, 一般是将逃生的人员作为无意识的粒子来看待,因此缺乏对实际逃生过程的一些复杂现象的模拟能力, 而如果用元胞自动机模型就可以很好地考察人员的智能性和差异性的作用. 但是考虑到火灾人员逃生的特殊性以及复杂性, 目前已有的元胞自动机模型都不能很好地直接应用.通过分析我们认为, 火灾人员逃生模型不同于一般行人流模型之处主要有: () 火灾中人员都尽可能以最大速度逃生. (简单和必要性原则. 通过分析火灾对人员逃生的影响,可以认为人员在火灾中的逃生过程主要受两个方面因素的影响: 一是主观因素, 包括人员对周围环境的认识(如各个出口位置分布人员对火灾发生位置和危险程度的认识等等. 二是客观因素,包括人员逃生能达到的最大速度客观因素之间是相互影响总危险度图位置危险度火灾危险度总危险度图总危险度图总危险度图0.40 m 的空间, 这是在密集人流中典型的人员空间分配[25](另外一种常用的标准[24]是0.457m s −1, 正常情况下为1.30 ms −1左右[16]. 因为模型中所有人员是并行变更位置的, 这样就引入了反应时间问题, 如果规定每个时间步每个人员只能移动一格, 则紧急情况下每个时间步为0.40/1.80) 当人员发现某处发生火灾时, 则该处及周围格点的危险度随之增大. (总危险度图898 www.scichina本文的模型分为基本模型和扩展模型两种,基本模型主要有3个并行变更阶段. 第1个阶段是目标格点的选择, 每个人员在本身所在格点及相邻的4个格点中(即不包括对角线运动)根据自己的选择一个空的总危险度位置危险度火灾危险度总危险度位置危险度火灾危险度火灾危险度”则在扩展模型中考虑. 第2个阶段的目的是解决冲突, 所有人员按第1阶段变更之后, 如果进入某个格点的人数大于0, 则按每人相同的概率选择一位留下, 其余回到原位, 这样做主要是为了模拟现实情况下的人员运动的不确定性. 用这种方法解决冲突还有一个作用就是较密集的地方由于竞争增大必然会有更多的人员不能移动, 这就模拟了人员之间推挤而导致前进困难的情况. 这两个阶段就完成了该时间步的人员位置变更. 最后一个阶段主要是对进行变更, 根据各人员对周围环境的重新认识变更各自的总危险度图) 对每个被人员占据的元胞, 比较其与周围4个元胞(除去被其他人员占据的元胞)的总危险度大小, 选择危险度最小者作为要进入的目标元胞, 并将目标元胞的进入人数增加1;全部结束后转到() 判断每个元胞的进入人数n , 若其值大于0, 则按均等机会原则选择其中一位留下,其余元胞在本时间步不做移动; 到这里实现了所有元胞状态(即是否被人员占据)的变更; 全部结束后转到() 分析每个新位置上人员的, 若因为发现更优出口而需要改变路线, 则调整其, 将新出口作为危险等级最低点, 在扩展模型中还要考虑根据火灾场景来调整其; 全部结束之后重新转到() 为了模拟人员的智能加入的概念(见图1, (a)和(b)中的阴影部分分别是视野为1和2时中间位置元胞所看到的范围), 随着人员视野的扩大,其对当前时间步运动方向的确定就可以按照下一时间步的最优选择来进行. 此外, 视野还可以用来模拟人员在火灾中由于烟气存在而导致的视力范围缩小等问题. (危险源”, 其周围的危险度相应增大. () 另外,可以通过数据收集和问卷调查的方式收集实际生活中人员在火灾中的各种反应数据并将其加入到模型当中. 例如在接收到火灾信息后的反应(因为人从接收信息到做出逃生决定之间有个反应时间, 不同的人反应时间也会不同). 在对出口不明的情况下是如何选择逃生路线的(如跟随多数人运动还是往人少的地方运动等), 以及人在有毒烟气中停留时间与其生理上受到的伤害之间的关系等等, 这些因素的考虑可以使模型更真实地模拟火灾人员逃生情况.图1 元胞视野示意图2 模拟算例下面给出用基本模型和扩展模型模拟的大房间内人员疏散的一些典型结果.2.1 基本模型的算例图2是用基本模型模拟一个大房间(只有一个出口)内人员疏散的情况, 为了和已有的模型进行比较, 这里暂时不考虑火灾场景的作用,即总危险度图呈辐射状衰减, 门口处的元胞危险等级最低,而离门口最远的两个角落上的元胞危险等级最高. 整个房间被划分成30第15个时间步和第80个时间步时的人员分步情况图. 通过与文献[24, 26]的比较,可以看出本文模型可以很好地模拟这种简单的情况.2.2 扩展模型的算例为了验证扩展模型的应用能力, 模拟了扩展视野之后的大房间内人员疏散的情况. 图3是在算例1的基础上将视野范围改为图1(b)所示情况后的人员疏散情况(初始条件和的确定都相同). 图3(a)~(c)分别为第15,50和80个时间步时人员的分布情况, 比较图2(c)与3(c)可以看出, 由于扩展了视野, 人们能够看到更广的范围从而进行更合理的路线选择(因为从人们的常识以及与文献[24, 26]的比较来看, 图3中的人员分布情况更合理一些). 同样这种情况也可以用来解释人员在火灾中由于烟气存在而导致的视力下降现象, 即将算例1解释为烟气浓度更大时的人员疏散过程.从本算例可以看出, 引入概念的确可以解决真实火灾场景中的一些特殊现象.此外, 该扩展模型还可以用来模拟由于烟气对人们视力的影响或其他原因导致的不同出口处人员分布不均匀而导致逃生效率降低的情况.另外, 其他的扩展模拟同样可以用来研究实际逃生过程的特殊现象, 例如考虑不同速度等级的人员分配可以研究长走廊中由于局部加宽而引起的逃生效率变化问题.算例3是在算例2的基础上加入了火灾场景后的人员逃生情况, 这里简单地认为火源及其影响区域不随时间变化, 并只考虑火灾场景对人员心理的作用(对人员逃生路线的影响),暂时不考虑有毒烟气对人员生理机能(包括期望速度和视力等)的影响. 对于火灾场景的危险度我们是这样考虑的: 在火灾影响区域内, TD (总危险度)等于PD (位置危险度)与FD (火灾危险度)的线性和, 通过对模型的演算, 发现当FD 与PD 的系数比为10左右时模拟效果比较好,因此在该算例中选择系数比为10. 真实火灾中对于不同的人(其对火灾危险度认识不一致)以及不同危险程度的火灾, 这个系数比是不同的,需要通过相应的数图2基本模型模拟的大房间人员疏散示意图图3 扩展模型(增大视野)模拟的大房间人员疏散示意图万方数据900www.scichina 图4 扩展模型模拟的发生火灾大房间内人员逃生示意图据调查获得. 这里为了简单起见, 认为所有人员对房间和火灾的认识都是完整的, 并且不随时间变化. 这样每个人员的由和叠加而成, 是以火源为危险等级最高点呈辐射状衰减, 并有一定的影响范围,同算例1和 2. 最终中, 火源处危险等级最高. 图4同样给出了逃生过程的3个典型阶段. 图4(a)~(c)分别是第5, 15和50个时间步时人员分布情况(圆形阴影部分为火源(十字形区域)及其影响区域), 可以看出由于火灾场景的加入使得该处的危险度急剧升高, 人们相应地改变了逃生路线, 绕过了火灾影响区域.3结束语本文简单介绍了元胞自动机及其在交通流和行人流中的应用, 从中可以看出元胞自动机具有很强的模拟复杂物理现象的能力, 其在火灾人员逃生模型的应用前景也是很诱人的. 尽管如此, 据作者所知, 目前利用元胞自动机来专门研究火灾中人员逃生现象的模型鲜见报道, 其主要原因在于火灾这种现象本身的复杂性加上目前对元胞自动机行人流模型的研究还未成熟,使得这方面的工作开展得较慢.研究火灾中人员逃生现象, 建立一个合理总危险度图方便, 并且简单地反映了火灾场景对人员主观方面的影响. 基本模型力求包括一些基本的基本现象以及火灾人员逃生中的一些特殊现象, 例如通过改变来模拟诸如由烟气引起的视力范围缩小2Wolfram S. Theory and Applications of Cellular Automata.Singapore: World Scientific, 19863 Wolfram S. Cellular Automata and Complexity. Baltimore:Addison-Wesley Publishing Company, 19944谢惠民. 复杂性与动力系统. 上海: 上海科技教育出版社, 19945 张本祥, 孙博文. 社会科学非线性方法论. 哈尔滨: 哈尔滨出版社, 19976Kai N, Michael S. A cellular automaton model for freewaytraffic. J Phys I, 1992, 2(12): 2221~22297 Fukui M, Ishibashi Y. Traffic flow in 1D cellular automatonmodel including cars moving with high speed. J Phys Soc Jpn, 1996, 65(6): 1868~18708Rickert M, Nagel K, Schreckenberg M, et al. Two-lanetraffic simulations using cellular automata. Physica A, 1996,231(4): 534~5509Simon P M, Gutowitz H A. Cellular automaton model forbi-directional traffic. Physical Review E, 1998, 57(2):2441~244410 Wolfman D. Cellular automata for traffic simulations.Physica A, 1999, 263(1-4): 438~45111 Sasvari M, Kertesz J. Cellular automata models of singlelane traffic. Physical Review E, 1997, 56(4): 4104~411012 Biham O, Middleton A A, Levine D. Self-organization anddynamical transition in traffic-flow models. Physical Review A, 1992, 46(10): 6124~612713 Chowdhury A D, Schadschneider A. Self-organization oftraffic jams in cities: effects of stochastic dynamics and signal periods. Physical Review E: Rapid Communications (AIP, USA), 1999, 59(2): 1311~131414 Special Report 209: Highway Capacity Manual.Transportation Research Board, National Research Council,Washington D C, 1985. Chapter 1315 Blue V J, Adler J L. Emergent fundamental pedestrian flowsfrom cellular automata microsimulation. Transportation Research Record, 1998, 1644: 29~3616 Blue V J, Adler J L. Bi-directional emergent fundamentalpedestrian flows from cellular automata microsimulation.In: Ceder A, ed. Transportation and Traffic Theory,Proceedings of the 14th International Symposium on Transportation and Traffic Theory, Jerusalem, Israel, 1999.235~25417 Blue V J, Adler J L. Cellular automata microsimulation formodeling bi-directional pedestrian walkways. Forthcoming in Transportation Research B-METH, 2001, 35(3):293~31218 Blue V J, Adler J L. Modeling four-directional pedestrianflows. In: Proceedings of the 79th Transportation Research Board. Washington D C, 200019 Helbing D, Molnar P. Social force model for pedestriandynamics. Physical Review E, 1995, 51(5): 4282~428620 Virkler M R, Elayadath S. Pedestrian speed-flow-densityrelationships. Transportation Research Record, 1994, 1438:51~5821 Lovas G G . Modeling and simulation of pedestrian trafficflow. Transportation Research B, 1994, 28(6): 429~44322 AlGadhi S, Mahmassani H. Simulation of crowd behaviorand movement: fundamental relations and application.Transportation Research Record, 1991, 1320: 260~26823 Helbing D, Farkas L, Vicsek T. Simulating dynamicalfeatures of escape panic. Nature, 2000, 407(28): 487~49024 Special Report 209: Highway Capacity Manual.Transportation Research Board, National Research Council,Washington D C, 199425Burstedde C, Klauck K, Schadschneider A, et al.Simulation of pedestrian dynamics using a two-dimensional cellular automaton. Physica A, 2001, 295(3-4): 507~52526 Levin B C, Braun E, Navarro M, et al. Further developmentof the n-gas mathematical modelan approach for predicting the toxic potency of complex combustion mixtures. American Chemical Society, 1995, 599: 293~31127 Gwynne S, Galea E R, Owen M, et al. A review of themethodologies used in evacuation modeling. Fire and Materials, 1999, 23(6): 383~38828 Ashe B, Shields T J. Analysis and modelling of theunannounced evacuation of a large retail store. Fire and Materials, 1999, 23(6): 333~33629 Hartzell G E. Engineering analysis of hazards to life safety infires: the fire effluent toxicity component. Safety Science, 2001,38(2): 147~15530 Sekizawa A, Ebihara M, Notakeet H, et al. Occupants’behaviour in response to the high-rise apartments fire in Hiroshima city. Fire and Materials, 1999, 23(6): 297~30331 Ozel F. Time press and stress as a factor during emergencyegress. Safety Science, 2001, 38(2): 95~10732 Bak P. How nature works: the science of self-organizedcriticality. Nature, 1996, 383(6603): 772~773(2002-01-31收稿, 2002-04-16收修改稿)万方数据。
《基于空间细化元胞自动机的行人疏散建模与仿真》范文
《基于空间细化元胞自动机的行人疏散建模与仿真》篇一一、引言近年来,行人疏散建模与仿真在公共安全、城市规划、建筑安全等领域引起了广泛的关注。
空间细化元胞自动机作为现代建模和仿真的有效工具,其在处理大规模人群动态问题上的表现尤其出色。
本文旨在通过构建基于空间细化元胞自动机的行人疏散模型,进行行人疏散行为的仿真研究,为相关领域提供理论依据和参考。
二、元胞自动机模型与行人疏散元胞自动机是一种通过定义元胞(或单元)及其状态和变化规则,对离散的空间和时间进行建模的仿真方法。
在行人疏散过程中,可以将建筑物内部或特定区域的空间进行格网化,并采用元胞自动机进行仿真模拟。
然而,传统的元胞自动机在描述空间环境和个体行为方面往往较为简化,因此我们提出基于空间细化的元胞自动机模型进行行人疏散建模。
三、基于空间细化元胞自动机的行人疏散模型构建(一)模型假设与参数定义在构建模型时,我们假设每个元胞内的人员数量和速度等参数是可变的,同时考虑了多种影响因素,如空间布局、出口位置、出口容量等。
我们定义了包括个体行为特征、空间环境特征和动态变化特征等在内的多种参数。
(二)模型构建基于上述假设和参数定义,我们构建了基于空间细化元胞自动机的行人疏散模型。
该模型包括元胞的划分、个体行为的设定、动态变化规则的制定等部分。
在元胞划分上,我们根据实际场景的空间布局进行细致的划分;在个体行为设定上,我们考虑了行人的行走方向、速度、避障行为等因素;在动态变化规则上,我们根据行人的行为特征和空间环境的变化进行动态调整。
四、行人疏散仿真与结果分析(一)仿真实现我们利用计算机编程技术实现了基于空间细化元胞自动机的行人疏散仿真。
在仿真过程中,我们根据实际情况设置了不同的场景和参数,对行人疏散过程进行了多次模拟。
(二)结果分析通过对仿真结果的分析,我们可以得到以下结论:1. 空间布局对行人疏散效率有显著影响。
合理的空间布局可以有效地提高疏散效率,减少拥堵和混乱现象的发生。
基于元胞自动机的人员疏散模型设计与实验
i n a l l f i e l d s o f s o c i a l a n d n a t u r a l s c i e n c e s 。i n c u r r e n t e r a w i t h t h e t e c h n o l o g i e s o f i n t e me t f o t h i n g s a n d b r o a d b a n d c o mmu n i c a t i o n。t h e a p p l i c a t i o n b e c o me s mu c h w i d e r .B y u s i n g t h e p i r n c i p l e o f c e l l u l a r a u t o ma t a ,we e s t a b l i s h a ma t h e ma t i c a l mo d e l o f e v a c u a t i o n .T h e mo d e l
第3 O卷第 7期
2 0 1 3年 7月
计 算机 应用 与软 件
C o mp u t e r Ap p l i c a t i o n s a n d S o f t wa r e
Vo 1 . ቤተ መጻሕፍቲ ባይዱ 0 No . 7
J u 1 .2 0 1 3
基 于 元胞 自动机 的人 员 疏 散 模 型 设 计 与 实 验
任 小 娟
( 山东英才学院 山东 济南 2 5 0 0 1 4 )
摘
要
元胞 自动机作为一种动态模 型与通 用性建模 的方 法, 其应用几 乎涉及社 会和 自然科 学的各个领域 , 在 当前物联 网技术 、
宽带通信技术 时代得到 了更加广泛的应用。利 用元胞 自动机 原理建立人 员疏散 的数学模型 , 模 型采用 二维元胞 自动机技 术, 确定元 胞 空间和 元胞状 态, 根据实际情况建 立人 员移 动行为规则并讨论元胞 重复行进 次数和危险 物质 扩散对人 员行 为 的影响。实验结果
基于元胞自动机的人群疏散模型

e ic f i e n c y o f t h e r e j e c t i o n o f d ng a e r s nd a he t a p p e a l i n g o f t h e e x i t s . T h i s p a p e r ma i n l y s t u d i e s he t e f e c t o f t h e d e n s i t y o f
c r o wd s b l nd i l y wi l l c a u s e c o n g e s i t o n b e c a u s e t he l ow e f ic f i e n c y o f e v a c u a io t n .
Ke y wo r d s : t h e o r y o fCA; o c c u p nt a ps yc h o l o g y ; e v a c u a t i o n ; a l g o r t i h m o f Eu c l i d s p a c e d i s t nc a e
Ev a c u a t i o n Mo de l Ba s e d o n The The o r y 0 f CA GONG Qi n g — Ge , S HE N Xi a o - F e i , WANG We n - J u n
( I n s t i t u t e o f E q u i p me n t a n d nf I o r ma t i o n T e c h n o l o g y u n d e r t h e C h i n e s e A r me d P o l i c e F o r c e , E n g n i e e r i n g U n i v e r s i t y o f he t C h ne i s e A r me d P o l i c e F o r c e , Xi ’ a l l 7 1 0 0 8 6 , C h na i )
《基于空间细化元胞自动机的行人疏散建模与仿真》范文
《基于空间细化元胞自动机的行人疏散建模与仿真》篇一一、引言随着城市化进程的加速,大型公共场所如购物中心、火车站、地铁站等人员密集区域的行人疏散问题日益突出。
如何有效地模拟和预测行人疏散行为,对于保障公共安全具有重要意义。
本文提出了一种基于空间细化元胞自动机的行人疏散建模与仿真方法,旨在为相关研究提供理论支持和实践指导。
二、空间细化元胞自动机模型空间细化元胞自动机模型是一种基于空间离散化和时间离散化的行人行为模拟方法。
该模型将疏散空间划分为若干个元胞,每个元胞代表一定区域内的空间状态。
在此基础上,通过定义元胞的属性和状态,以及元胞间的相互作用和转换规则,模拟行人的运动和疏散过程。
在本文中,我们采用了空间细化元胞自动机模型来描述行人的疏散行为。
首先,将疏散空间划分为若干个细小的元胞,每个元胞具有一定的空间属性和状态。
然后,根据行人的行为特性和疏散环境,定义元胞间的相互作用和转换规则。
最后,通过计算机仿真技术,模拟行人的运动和疏散过程。
三、行人疏散建模在行人疏散建模过程中,我们需要考虑行人的行为特性、疏散环境以及元胞间的相互作用等因素。
首先,我们需要定义行人的基本属性,如性别、年龄、行走速度等。
其次,我们需要考虑疏散环境对行人行为的影响,如出口位置、障碍物分布、灯光亮度等。
最后,我们需要根据元胞间的相互作用和转换规则,模拟行人的运动和疏散过程。
在本文中,我们采用了多种方法来进行行人疏散建模。
首先,我们通过问卷调查和实验数据等方式收集了行人的基本属性和行为特性。
其次,我们根据疏散环境的实际情况,建立了相应的元胞属性和状态。
最后,我们通过定义元胞间的相互作用和转换规则,以及行人的行为模型,模拟了行人的运动和疏散过程。
四、仿真实验与分析为了验证本文提出的基于空间细化元胞自动机的行人疏散建模与仿真方法的有效性,我们进行了仿真实验。
首先,我们建立了仿真场景,包括疏散空间的布局、出口位置、障碍物分布等。
然后,我们设置了不同的疏散场景和条件,如不同数量的行人、不同的疏散环境等。
基于元胞自动机和社会力模型的人员疏散问题研究

程;接着,为了使疏散模型更准确,考虑人员心理作用引入社会力模型,并充分考虑自驱动力、人与人之间作用
力以及 人与边 界 之间作用力;最 后,对改 进 后的疏散 模型进行验 证,不同时刻的游客分布情况图,出口人员聚
集数量以及疏散时间关系验证了所提模型的有效性,同时与目前上海迪士尼的疏散时间相比,基于元胞自动机
工业技术 D OI:10.16 6 6 0 / ki.1674 - 0 98X . 2 0 0 7-56 4 0 -7539
科技创新导报 2020 NO.30
Science and Technology Innovation Herald
基于元胞自动机和社会力模型的人员疏散
问题研究①
——以上海迪士尼乐园为例
模型的人员疏散更具有竞争力。
关键词:元胞自动机 社会力 上海迪士尼 疏散 效率
中图分类号:TP391
文献标识码:A
文章编号:1674-098X(2020)10(c)-0041-06
Research on Evacuation Based on Cellular Automata and Social Force Models
qhp950@。
科技创新导报 Science and Technology Innovation Herald
41
Copyright©博看网 . All Rights Reserved.
科技创新导报 2020 NO.30 Science and Technology Innovation Herald
——Taking Shanghai Disneyland for Example
CHEN Zhiting LIU Baicen LI Peiyuan QIN Haipeng (School of Electrical Engineering and Automation, Jiangsu Normal University, Xuzhou, Jiangsu Province,
基于元胞自动机模型的地铁人员疏散仿真研究

Research on Subway Evacuation Simulation Based on Cellular Automata Model
(Guangzhou Railway Polytechnic, Guangzhou Abstract XU Aijun XIE Yixin 510430)
合地铁建筑结构特征, 提出基于元胞自动机建立地铁应急疏散模型, 利用遗传算法淘汰适应度低下的网格节点, 从而生成全 局最优子图, 计算最佳逃生路径。仿真实验证明, 新模型和算法平均疏散路径长度最短, 能很好地应用于地铁疏散预案和消 防演练之中。 关键词 元胞自动机; 遗传算法; 地铁; 疏散模型 TP393 DOI: 10. 3969/j. issn. 1672-9722. 2017. 05. 033 中图分类号
无人占据两种情况。网格节点之间疏散人员按照 逃生出口顺序沿着网格从一个节点移动到另一节 点, 从而准确展现地铁建筑结构和障碍物位置, 真 实表现人群逃生路径信点 (m, n) 概率, 则 P m n 可以表达式为
i P m n = Q exp( F ΓT m n)exp( F A A im n)(1 - H m n)O m n
其中
(3)
-1
2
元胞自动机的定义与特征
元胞自动机是指在具有离散和有限状态的元
其中, (m, n) 被疏散人员占据情 H m n 是相邻网格点
Q m n 表示相邻网格点 况, (m, n) 被障碍物占据情
é ù i Q = êå exp( FT T m n)exp( F A A im n)(1 - H m n)O m nú ëm n û (4)
Metro subway underground is too complex to cause fire. According to evacuation flow and individual behavior, com⁃
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第51卷第23期 2006年12月论文一种基于移动机器人行为的人员疏散的元胞自动机模型翁文国袁宏永范维澄(清华大学工程物理系公共安全研究中心, 北京100084. E-mail: wgweng@)摘要紧急情况(如火灾等)下的人员疏散研究可为减少人员受到伤害提供必要的指导. 提出一种基于移动机器人行为的人员疏散的元胞自动机模型. 将疏散的人员看作是智能移动机器人, 其运动模式包括目标制导、避障、绕行和紧张行为驱动人员与环境的相互作用. 将移动机器人的运动模式与元胞自动机理论结合, 建立人员疏散模型. 针对不同移动速度的人员疏散模拟研究表明, 提出的模型能够比较准确地预测紧急情况下的人员疏散现象.关键词疏散模型 元胞自动机 移动机器人随着社会和经济的发展, 安全问题越来越引起了人们的关注, 特别是1994年“一二·八”新疆克拉玛依市友谊宫特大火灾(330人死亡), 2000年“一二·二五”洛阳市东都特大火灾(309人死亡), 2004年北京密云县元宵灯会踩踏事故(37人死亡)等的灾难事件, 迫切要求进行人员疏散的研究. 在火灾等紧急情况下, 安全疏散是保证人员安全的重要手段. 火灾安全设计和评估中通常可用的是安全疏散时间(the available safe egress time, ASET)和必需的安全疏散时间(the required safe egress time, RSET). ASET与建筑物的防火性能和火灾发展速度等因素有关; RSET与人员行为和人群特征等因素有关.目前, 人员疏散模型的建模方法大致可分为两种: 一种是宏观的方法, 即把人员视为连续流动介质, 可以利用现成的流体力学的研究成果, 但此方法忽略个体的作用和个体间的差异; 另一种方法是微观的方法, 即充分考虑人员行为. 微观方法又可分为连续模型和离散模型, 连续模型中最为著名的是Helbing等人[1,2]的社会力模型, 离散模型中使用最多的是元胞自动机模型和格子气模型[3~9]. Helbing等人[1,2]用社会力模型展现了人员疏散过程中的一些动力学特征: 失调、扎堆、快即是慢等, 但连续性模型运行速度慢, 计算机模拟时间随人数的增加呈指数增长, 因此不太适合行人众多情况下的模拟. 离散型模型的特点是规则简单、运算速度快. Muramatsu等人[3]运用一种有偏随机走动者格子气模型来模拟二维问题中的行人流, Tajima等人[4]则把这种格子气模型应用到特定的建筑结构中, Maniccam[5]讨论了格子气模型中更新规则和后退步对四向行人流的影响, Kirchner等人[6]建立了基于生物趋向规律的元胞自动机人员疏散模型; 国内杨立中等人[7,8]建立了参考社会力模型和基于总危险度的人员疏散微观离散模型, 以及宋卫国等人[9]建立了考虑摩擦与排斥的人员疏散元胞自动机模型. 本文中, 亦将采用元胞自动机模型, 但利用移动机器人的运动模式驱动人员与环境的相互作用.运动模式源于心理学[10]和神经学[11], 而本文的思想是利用更新的模式[12]——应用于大脑和机器人的运动模式. 基于行为的移动机器人研究, 其最终目标是利用非生命部件构造生命系统[13]和计算机算法, 如强化学习、神经网络和进化算法等, 使机器人拥有越来越多的智能, 其行为最大限度地类似于人类. 相反, 智能移动机器人的行为也接近于人类某些典型的行为, 如目标制导, 避障等. 因此人类大力发展智能移动机器人的同时, 也可以利用智能移动机器人的一些理论来指导人类在某些情况下的行为. 本文将建立一种基于移动机器人行为的人员疏散的元胞自动机模型, 并描述一个模拟算例, 即不同移动速度的人员从一层办公楼的疏散过程.1提出模型本文的模型是以元胞自动机更新规则为基础, 结合移动机器人的运动模式的研究思路建立起来的[14]. 模型的框架是将建筑物平面进行均匀的网格论 文第51卷 第23期 2006年12月划分, 每个网格或被障碍物占据, 或被人员占据, 否则为空. 模型中每个元胞对应0.5 m ×0.5 m 的空间, 是人流中典型的人员空间分配[15], 模型中的每个人员占据一个元胞. 每个人员只能在某个时间步沿东、西、南、北四个方向中的一个方向移动一格, 移动方向的选择将由每个方向的移动权重确定, 移动权重是基于移动机器人的运动模式计算的.考虑真实环境中的人员, 可能的运动模式包括目标制导(向门口或其他人员, 如朋友等的移动)、避障(躲避其他人员或障碍物, 如墙壁等)、绕行(绕过低速度的人员或障碍物, 如桌子等)以及紧张行为(如发生火灾时人员的紧张不安导致的错误行为). 当人员检测到障碍物时, 运动模式会产生一个斥力使人员远离这个障碍物:avd S S d M d S S Md M ⎧⎪−⎪=<⎨−⎪∞<⎪⎩≥≤S , (1) av av /S S 为沿障碍物中心到行人的连线, 远离障碍物的方向, 其中S 是影响半径, 超出此半径的障碍物不会对其产生影响, M 是安全边界, d 是行人与障碍物之间的距离. 绕行的幅值与避障的相同, 即: sw av ,=S S 方向是垂直于沿障碍物中心到行人的连线, 显然它有两个方向, 本文的模型选择随机的一个. 目标制导的运动模式提供行人到目标物的吸引力:mo1d C d D D d C C D d D ⎧⎪−⎪=<⎨−⎪∞<⎪⎩≥≤S , (2) mo mo /S S 为沿行人到目标物中心的连线, 朝目标物的方向, 其中C 和D 分别是控制区和死区的半径. 当人员在紧张情况下, 可能会导致错误行为, 我们将之称为紧张行为:ne ||1=S , (3)ne ne /S S 为0和2π 之间的伪随机方向, 这些运动模式都是相互独立的, 能并行处理. 而这些运动模式之间的相互重要性用相应的权重值表示, 比如, 当一个房间内发生火灾时, 目标(门)制导比其它的运动模式都重要. 权重值一般由人为设定, 也有通过自动方式确定, 如在线学习[16]、基于案例[17]或者进化算法[18]等. 本文为了简化元胞自动机的更新规则将人为设定各个运动模式的权重值, 运动模式的矢量与其权重值相乘, 这些乘积在四个方向的加和值即是各个方向的移动权重. 图1(a)表示了四个方向移动权重的确定图.本文的元胞自动机模型按以下规则进行更新: (ⅰ) 每个人员的四个方向的移动权重由上文描述的运动模式确定;(ⅱ) 如果某个方向的最近邻域的元胞被障碍物或者别的人员占据, 这个方向的移动权重设为0;(ⅲ) 人员在某个时间步仅向移动权重最大的方图1 四个方向的移动权重的确定图(a)以及二维网格(元胞)中人员的邻域设置(b)运动模式S mo , S av , S sw 和S ne 分别代表目标制导、避障、绕行和紧张行为的运动模式, 权重值W mo , W av , W sw 和W ne是相应运动模式的重要性的体现, 四个方向的移动权重是运动模式与其权重值乘积的矢量求和第51卷第23期 2006年12月论文向移动一格;(ⅳ) 如果四个方向的移动权重均为0, 人员将静止不动.这个模型采用顺序更新策略, 在每个更新, 所有人被随机编号为1到N, 其中N是系统中的人数, 然后从1到N按顺序进行更新.本文采用图1(b)所示的二维网格(元胞)中人员的邻域设置[19], 因此避障和绕行的运动模式的参数设为: 3S=, 1M=. 为了简单起见, mo1=S.2模拟算例根据上文模型的描述, 我们模拟一个典型的人员疏散算例: 人员从一层办公楼的疏散过程, 如图2(a). 这一层的办公楼有三类房间, A类、B类和C类房间的大小分别是4 m×6 m, 12 m×6 m和8 m×6 m.中间走廊的宽度为2 m, 仅有一个东面出口, 宽度也是图2 疏散模型的典型阶段图(a) 开始阶段t = 0 s; (b) 中间阶段t = 10 s; (c) 中间阶段t = 55 s; (d) 仅剩下不多人员的结束阶段论 文第51卷 第23期 2006年12月2 m. 而各个房间门的分布如图2(a): A 类房间的门(宽度为1 m)紧挨着东墙, B 类房间有两个门(宽度均为2 m)分别离东、西墙各1 m, C 类房间的门(宽度为1 m)置于正中间. 在模拟过程中, 所有的门均是开放的.A 类、B 类和C 类房间的人员初始随机均匀分布30、90和60人, 其中移动速度2.0(白色), 1.5(灰色)和1.0 m/s(黑色)的人员均为10、30和20人. 模拟中时间步设为1/12 s, 在模型中体现人员不同移动速度是通过分别间隔3, 4和6个时间步移动一格. 对于有两个门的房间(B 类房间), 本文设定人员从最近的门疏散. 各个运动模式的权重值由人为设定: W mo =1, W av = W sw = W ne = 0.1. W mo 可以认为是人员对于出口处熟悉程度的测度, 本文设定的W mo 为最大值, 意味着人员在疏散过程中知道离出口处的最短路径, 但由于与别的人员的相互作用和紧张行为(W av , W sw 和W ne )无法沿着最短路径疏散.图2(a)~(d)显示了人员疏散过程, 分别是t = 0, 10, 55和115 s 的疏散模型的典型阶段图. 从图2中可以观察出疏散动力学的一个重要特征: 疏散过程中人员靠着他们之间的空隙往出口处移动. 图2(b)的中间阶段可以看出, 人员疏散过程中在出口处会出现一个半圆形的人员堵塞形状. 当大量人员疏散到走廊时, 人员并不在走廊的东面出口处集结, 相反走廊西面的人员密度比东面的要多, 如图2(c), 这是由于走廊的宽度不够大, 造成人员疏散效率的下降. 从图2(d)的疏散结束阶段, 可以看到, 剩下不多人员中移动速度慢(1.0 m/s,黑色)的居多, 这意味着移动速度快的在疏散过程中会占据优势. 这个结论也可以从图3中观察得出. 图3是不同速度的疏散成功的人员数量, 疏散成功是指人员跑出走廊的东面出口, 图3的图3 不同速度的疏散成功的人员数量数据是100个算例的统计平均值. 显然在疏散过程中的任何时刻, 移动速度快的疏散成功的人员数量比移动速度慢的要多, 如t = 60 s 时刻, 移动速度为2.0 m/s 的人员疏散成功人数为123人, 而1.5 m/s 的人数为104人, 但是1.0 m/s 的人数最少为82人. 而不同速度的疏散成功时刻也不一样: 移动速度快的人都成功疏散的时间短, 相反移动速度慢的人疏散时间长, 如移动速度为2.0 m/s 的疏散时间为132.5 s, 1.5 m/s 的疏散时间为141.7 s, 1.0 m/s 的疏散时间为152.5 s.通过本算例的模拟可以看出通过适当的参数选择, 本文模型可以得到比较合理的模拟结果, 这证明了本模型的适用性.3 结论本文提出了一种基于移动机器人行为的人员疏散的元胞自动机模型. 该模型将疏散的人员看作是智能移动机器人, 其运动模式包括目标制导、避障、绕行和紧张行为驱动人员与环境的相互作用. 将移动机器人的运动模式与元胞自动机理论结合, 建立人员疏散模型. 应用该模型对不同移动速度的人员从一层办公楼疏散过程的模拟结果, 观察出一些合理的疏散动力学的现象, 如人员疏散过程中在出口处会出现一个半圆形的人员堵塞形状, 移动速度快的在疏散过程中会占据优势等. 这一模拟结果表明了本模型的适用性.进一步工作将利用移动机器人的计算机控制算法, 如强化学习、神经网络、进化算法等实现对人员疏散过程中的智能控制, 使之更符合人员的行为.致谢 本工作受国家重点基础研究发展计划(批准号: 2001CB409603)资助.参 考 文 献1 Helbing D, Farkas I, Vicsek T. Simulating dynamical features ofescape panic. Nature, 2000, 407: 487—4902 Helbing D, Molnar P. Social force model for pedestrian dynamics.Phys Rev E, 1995, 51: 4282—42863 Muramatsu M, Nagatani T. Jamming transition of pedestrian traffic at acrossing with open boundaries. Physica A, 2000, 286: 377—3904 Tajima Y, Nagatani T. Clogging transition of pedestrian flow inT-shaped channel. Physica A, 2002, 303: 239—2505 Maniccam S. Effects of back step and update rule on congestion ofmobile objects. Physica A, 2005, 346: 631—6506 Kirchner A, Nishinari K, Schadschneider A. Friction effects andclogging in a cellular automaton model for pedestrian dynamics. Phys Rev E, 2003, 67: 0561127 杨立中, 李健, 赵道亮, 等. 基于个体行为的人员疏散微观离散模型. 中国科学, E 辑: 技术科学, 2004, 34(11): 1264—1270第51卷第23期 2006年12月论文8 杨立中, 方伟峰, 黄锐, 等. 基于元胞自动机的火灾中人员逃生的模型. 科学通报, 2002, 47(12): 1484—14899 宋卫国, 于彦飞, 范维澄, 等. 一种考虑摩擦与排斥的人员疏散元胞自动机模型. 中国科学, E辑: 技术科学, 2005, 35(7): 725—73610 Piaget J. Biology and knowledge. Chicago: University of ChicagoPress, 197111 Frederiks J A M. Handbook of clinical neurology, Vol. Ⅳ, Disor-ders of speech perception and symbolic behavior. North Holland: Elsevier, 196912 Arkin R C. Motor schema-based mobile robot navigation. Int JRobot Res, 1989, 8: 92—11213 Brooks R. A layered intelligent control system for a mobile. IEEE JRobot Automat, 1986, 2: 14—2314 Weng W G, Hasemi Y, Fan W C. Motor schema-based cellularautomaton model for pedestrian dynamics. Int J Mod Phys C, 2006, 17: 853—859 15 Schreckenberg M, Sarma S D. Pedestrian and evacuation dynamics.Berlin: Springer, 200116 Clark R J, Arkin R C, Ram A. Learning momentum: On-line per-formance enhancement for reactive systems. In: Proceedings of the IEEE International Conference on Robotics and Automation.France: IEEE, 1992, 5: 111—11617 Ram A, Santamarĺa J C. Multistrategy learning in reactive controlsystems for autonomous robotic navigation. Informatica, 1993, 17: 347—36918 Pearce M, Arkin R C, Ram A. The learning of reactive control pa-rameters through genetic algorithms. In: IEEE/RSJ International Conference on Intelligent Robots and Systems. Raleigh: IEEE, 1992, 1: 130—13719 Nishidate K, Baba M, Gaylord R J. Cellular automaton model forrandom walkers. Phys Rev Lett, 1996, 77: 1675—1678(2006-07-21收稿, 2006-10-13接受)《科学通报》投稿指南在《科学通报》发表的原创性研究论文应同时具备以下条件:(ⅰ) 是自然科学基础理论或应用研究的最新成果;(ⅱ) 有重要科学意义, 属国际研究热点课题;(ⅲ) 有创新(新思路、新方法、新认识、新发现等);(ⅳ) 对本领域或(和)相关领域的研究有较大促进作用;(ⅴ) 就内容和写作风格而言, 对大同行或非同行科学家都有可读性和启发性.对原创性研究论文的写作要求:文章应论点明确、数据可靠、逻辑严密、结构简明; 尽量避免使用多层标题; 文字、图表要简练, 用较少的篇幅提供较大的信息量; 论述应深入浅出、表达清楚流畅; 专业术语运用准确, 前后保持一致.题目是文章的点睛之处, 要紧扣主题, 简明扼要, 但要有足够的信息, 能引起读者的兴趣; 应避免使用大而空的题目, 最好不用“…的研究”、“…的意义”、“…的发现”、“…的特征”等词; 尽可能回避生僻字、符号、公式和缩略语. 一般不超过24个汉字, 英文以两行为宜. 不使用副标题.摘要应反映论文的主要观点, 概括地阐明研究的目的、方法、结果和结论, 能够脱离全文阅读而不影响理解. 尽量避免使用过于专业化的词汇、特殊符号和公式. 摘要的写作要精心构思, 随意从文章中摘出几句或只是重复一遍结论的做法是不可取的. 摘要中不能出现参考文献序号.关键词用于对研究内容的检索. 因此, 关键词应紧扣文章主题, 尽可能使用规范的主题词, 不应随意造词. 关键词一般为3~8个.正文应以描述文章重要性的简短引言开始. 专业术语应有定义, 符号、简略语或首字母缩略词在第一次出现时应写出全称.引言是文章的重要组成部分, 关系到文章对读者的吸引力. 在引言中应简要回顾本文所涉及到的科学问题的研究历史, 简要介绍相关理论或研究背景. 需列举相关的参考文献, 尤其是近2~3年内的研究成果. 应非常明确地给出本研究的目的, 以及与以往研究的不同之外, 并在此基础上提出本文要解决的问题, 最后扼要交代本研究所采用的方法和技术手段等. 引言部分不加小标题, 不必介绍文章的结构.材料和方法主要是说明研究所用的材料、方法和研究的基本过程, 使读者了解研究的可靠性, 也使同行可以根据本文内容验证有关实验.讨论和结论应该由观测和实验结果引申得出, 并注意与其他相关的研究结果进行比较, 切忌简单地再罗列一遍实验结果. 讨论得出的结论与观点应明确, 实事求是.图和表应按正文中出现的先后顺序编号, 并置于文中相应位置处. 图的分辨率不能低于600 dpi, 图中线条要清晰, 图插在正文内. 表用三线表. 图表中物理量符号和单位符号之间以“/”分隔, 如“t/min”.公式以阿拉伯数字连续编号, 并用圆括号括起置于公式右侧.参考文献采用顺序编码制进行文内标注和文后著录, 即按正文中引用的先后顺序编号, 序号用方括号括起, 置于文中提及的文献著者、引文或叙述文字末尾的右上角. 参考文献引用是否得当是评价论文质量的重要标准之一. 如果未能在论文中引用与本项研究有关的主要文献, 尤其是近2~3年内的文献, 或是主要引用作者自己的文献, 编辑可能会认为对这篇文章感兴趣的读者不多. 对文中所引参考文献, 作者均应认真阅读过, 对文献的作者、题目、发表的刊物、年代、卷号和起止页码等, 均应核实无误, 切忌转引二手文献的不负责任的做法.。