自同步振动及振动同步传动的机电耦合机理
电机的耦合
电机的耦合电机的耦合是指在同一系统中多个电机之间存在一定的物理或电磁耦合关系。
耦合现象可能会对电机系统的正常运行产生影响,因此,了解和掌握电机的耦合规律是电机工程师进行系统设计和故障诊断的重要基础。
一、电机耦合的分类根据耦合机理和影响方式,电机的耦合可以分为以下几种类型:1. 机械耦合:多个电机通过共享同一轴或传动装置而相互耦合。
这种耦合方式在许多工业领域广泛应用,如机床、印刷机等。
机械耦合可能会导致传动装置的失调、振动和噪声增加等问题。
2. 磁场耦合:多个电机之间的电磁场相互作用导致耦合效应。
这种耦合方式在直流电机、同步电机和感应电机等电力传动系统中比较常见。
磁场耦合可能会造成磁场干扰、电磁振荡和冗余损耗等问题。
3. 控制耦合:多个电机之间的控制信号相互干扰,导致电机系统的控制性能下降。
这种耦合方式主要出现在采用集中控制的电机系统中,如机器人、自动化生产线等。
控制耦合可能会导致控制信号误差增加、动态响应变差等问题。
二、电机耦合的影响电机的耦合现象可能对电机系统产生以下一些影响:1. 性能下降:电机之间的耦合会导致电机系统的控制性能下降,如动态响应速度变慢、定位精度降低等。
这对于某些高要求的应用场合,如精密加工设备、医疗器械等,是不可忽视的问题。
2. 功耗增加:电机之间的耦合可能导致一些冗余功耗的产生,增加系统的整体功耗。
这会对能效要求较高的应用领域,如节能电机、电动汽车等,带来一定的影响。
3. 故障扩散:电机系统中的一个故障可能因为耦合效应的存在而扩散到其他电机上,导致系统中多个电机同时出现故障。
这需要在电机设计和故障诊断中进行综合考虑和防范。
三、电机耦合的控制与故障诊断为了减小电机耦合的影响,电机工程师可以采取以下措施:1. 合理的布置和隔离:在电机系统设计中,合理安排电机之间的空间布局和布线,并采取隔离措施,减小电机之间的物理和电磁耦合效应。
2. 优化控制策略:通过优化控制算法和参数调节,降低电机之间的控制耦合。
同步电机的工作原理
同步机电的工作原理一、引言同步机电是一种常见的电动机类型,其工作原理是基于电磁感应和磁场互作的原理。
本文将详细介绍同步机电的工作原理,包括结构、工作方式和工作原理的基本原理。
二、同步机电的结构同步机电由定子和转子组成。
定子是由若干个绕组组成的电磁线圈,绕组中通有交流电源。
转子是由永磁体或者电磁线圈组成的,通过电磁感应与定子的磁场相互作用,产生转矩,从而驱动转子旋转。
三、同步机电的工作方式同步机电有两种工作方式:同步工作和异步工作。
1. 同步工作同步机电在同步工作方式下,转子的转速与定子的旋转磁场的频率彻底相同,因此称为同步机电。
在同步工作方式下,同步机电的转子始终与定子的磁场保持同步,转矩稳定,转速恒定。
同步机电常用于需要精确控制转速的应用,如电力系统中的发机电、电动机等。
2. 异步工作同步机电在异步工作方式下,转子的转速与定子的旋转磁场的频率不同,因此称为异步机电。
在异步工作方式下,同步机电的转子与定子的磁场之间存在滑差,转矩不稳定,转速不恒定。
异步机电常用于需要启动转矩较大的应用,如电动机、压缩机等。
四、同步机电的工作原理同步机电的工作原理基于电磁感应和磁场互作的原理。
下面将详细介绍同步机电的工作原理。
1. 电磁感应原理当定子绕组通电时,会产生一个旋转的磁场。
根据电磁感应定律,转子中的导体将受到电磁力的作用,导致转子开始旋转。
这个旋转的运动将持续下去,直到转子的转速与定子的旋转磁场的频率达到同步。
2. 磁场互作原理同步机电的转子上通常设置有永磁体或者电磁线圈。
当定子的旋转磁场与转子上的永磁体或者电磁线圈的磁场相互作用时,会产生转矩,从而驱动转子旋转。
这种转矩的大小与定子和转子之间的磁场强度、磁场分布等因素有关。
3. 同步工作原理在同步工作方式下,同步机电的转子始终与定子的磁场保持同步。
定子的旋转磁场通过定子绕组产生,绕组中通有交流电源。
定子绕组通电后,产生的旋转磁场将与转子上的永磁体或者电磁线圈的磁场相互作用,产生转矩,驱动转子旋转。
三电机激振自同步振动系统的机电耦合机理
振 分析 , 了三电机激 振振动系统 自同步振动和振动 同步 的机 电耦 合机理 , 揭示 验证 了所建机 电耦合模型 的正 确性 , 为
高效 节 能 的 新 型 振 动 筛 提 供 了理 论 基 础 。 动 进一步开发大功率 、
V 键 词 : 动 ;自同 步 ; 电耦 合 ; 真 ; 关 振 机 仿 Malb t a
报一 油 、 和建 材 等 行业 的 高 效工 作 机 械 ( 振 动 筛 、 医药 如
g
同步振 动机 械是 一类 广泛 应用 于冶 金 、 炭 、 煤 石
振动 输送机 、 动给 料机等 ) 在石 油钻 井作业 中 , 振 。 大 量 的现 场实 践 证 明 , 动 筛 分 离钻 屑 的能力 由它 的 振 主要 工作部 件 —— 筛 网决 定 , 以 , 所 振动 筛性 能 的好 坏 , 现场 使用 的角 度看 , 从 很大 程度 上是 由该 筛实 用 筛 网的 目数 、 网 的面积决 定 的 , 了增 加振 动筛 筛 筛 为 网 目数 又保 证 足够 的钻 井液 处 理 能 力 , 只有 增 加 就
筛 网总面积 , 也就 客观上 要 求增 大振 动筛 功率 , 这 提 高 系统 激振 力 _ 。 】 ]
多 电机 激 振 振 动 筛 不 需 增 大 单 个 电机 的 激 振
1 三 电机 激 振 自同步 系统 的机 电耦 合
数 学 模 型
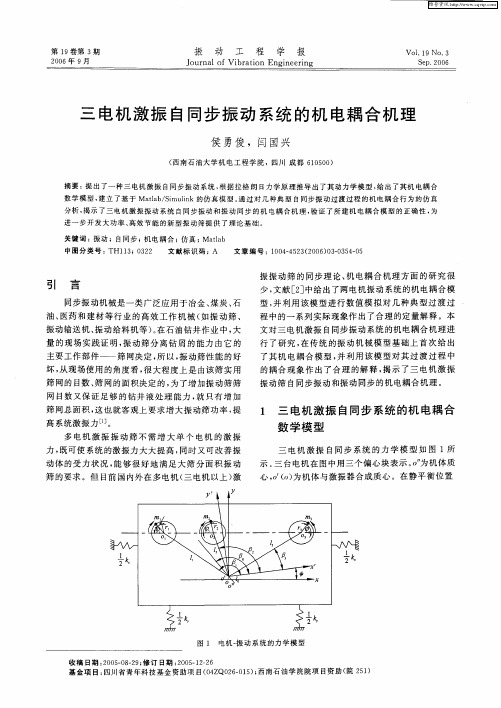
三 电机 激 振 自同步 系 统 的 力 学 模 型 如 图 1所
维普资讯
第 1 9卷第 3期 20 年 9 06 月
V o1 .19 No.3
S ep. 06 20
三 电机 激 振 自同步 振 动 系统 的机 电耦 合 机 理
侯 勇俊 ,闫 国兴
耦合相振子系统同步
耦合相振子系统同步
近年来,耦合相振子系统同步已经成为了研究领域中的热点问题。
相位同步是许多自然和工程系统中普遍存在的关键特性之一,因此理解和控制同步现象有着关键意义。
本文将从基本概念开始,详细阐述耦合相振子系统同步。
1. 概念说明
耦合相振子系统同步是指,在多个具有相似振动模式的振子系统之间发生同步现象,即各个系统之间运动状态的相位和频率趋向于相同。
该现象比较常见,常见的例子包括人体行走、脉冲功率机理、脑电放电等。
2. 同步机理
同步机理的研究是理解耦合相振子系统同步的关键。
经过研究发现,耦合相振子系统同步可以归结为耦合强度、振动频率差异、相位差等因素的影响。
具体来说,当两个或更多的振子系统之间的耦合强度较大时,它们会发生同步;当振动频率差异较小时,耦合相振子系统同步更容易发生;相位差也会影响耦合相振子系统同步的发生。
3. 应用
耦合相振子系统同步有广泛的应用前景。
例如,可以在研究人类协调运动时,利用同步现象来控制运动;在无线电技术中,互相同步的多个振荡器可以被用来保持精确的时间基准。
4. 研究成果
随着研究的深入,一些有趣的成果已经被取得。
例如,有学者通过数学模型预测同步现象的发生时间,从而为实际应用提供了重要的帮助;另一个研究小组则试图研究如何通过调节耦合强度来实现预定同步目标,这也让人们对未来耦合相振子系统同步的应用前景充满期待。
总之,耦合相振子系统同步是一个极为重要的研究领域,具有广
泛的应用前景。
理解它的本质原理,探索新的同步机制,是未来研究的重点方向之一。
同步振动系统机电耦合特性及系统稳定性分析
145科技展望TECHNOLOGY OUTLOOK中国航班CHINA FLIGHTS摘要:多锤联动过程中经常运用控制同步方式,并建立同步振动系统,本文对此进行了介绍,通过仿真分析提出并建立锤-桩-土运行系统,并构建相应的机电耦合模型,分析系统运行的稳定性,分析机电耦合的规律性,为同步振动系统运行提供了一定的参考意义。
关键词:同步振动系统;机电耦合特性;系统稳定性目前很多工程施工过程中均采用了联动控制方式,是对单台振动方式的重要补充,采用了机械机构连接每台振动锤,在目前很多工程施工中得到了推广,机电耦合过程中大量采用了同步振动系统,能够实现良好的机电耦合效果。
1同步振动系统的机电耦合数学模型同步振动系统运行过程中,在桩上放置了两台桩锤,采用合理打桩的工作方式,这种工作方式能够达到良好的耦合性。
在耦合系统运行过程中,可以将桩与桩锤看作为绝对刚体,土壤则是弹性体。
在作业过程中,桩随着桩锤振动,土壤与运动过程中的弹性力以及阻尼力,通过数值计,为位移与桩运动速度之间的线性函数,具有明显的线性特征[1]。
在振动系统整体的沉桩过程中,受到多种因素的影响,桩下沉速度在其中影响作用不大,与一个阻尼器与弹簧作用大小基本相似。
在桩逐渐下移过程中,运动中的弹性力在振动平衡点附近可以表示线性力。
土壤自身的黏性值较为有限,可以将阻尼力表示为随着速度正比例变动的线性力。
这是同步振动系统运行过程中重要的耦合特性之一。
三相异步电机是桩锤驱动过程中经常采用的重要方式之一。
多变量耦合过程中属于显著的非线性系统。
在沉桩时,锤、土、桩等三者之间构成了一个系统的机电耦合关系。
2同步振动系统稳定性分析同步振动系统在机电耦合过程中具有自身独特的耦合规律,系统振动过程中稳定性良好。
研究中选择两台转速相等的锤电机进行分析,随着振动的不断推进,电机转速在一定的范围之内逐渐升高,同时相位差值也随之逐渐收敛于零,电机转速一般最高可达1400r·min-1,此时相位差值会逐渐趋近于非零数值,转速中存在极限数值,主要是受到土壤参数的影响。
同步电机的工作原理

同步机电的工作原理引言概述:同步机电是一种常见的电动机类型,其工作原理基于电磁感应和磁场的同步运动。
本文将从五个大点来详细阐述同步机电的工作原理。
正文内容:1. 磁场的产生1.1 磁极的设置:同步机电通常由固定的磁极和转子组成。
固定磁极由永久磁铁或者电磁铁制成,用于产生磁场。
1.2 磁场的分布:磁场在机电内部均匀分布,形成一个旋转的磁场。
2. 电磁感应2.1 定子线圈:同步机电的定子线圈由导线绕制而成,通常与电源相连。
当电流通过定子线圈时,会产生一个旋转磁场。
2.2 磁通的变化:定子线圈的旋转磁场与固定磁极的磁场相互作用,导致磁通的变化。
2.3 电磁感应:根据法拉第电磁感应定律,磁通的变化会在转子上诱导出电动势,从而产生电流。
3. 磁场的同步运动3.1 极对极吸引:由于定子线圈的旋转磁场与固定磁极的磁场相互作用,导致转子被吸引到固定磁极的位置。
3.2 同步转速:当转子达到与旋转磁场同步的转速时,磁场的吸引和排斥力达到平衡,使转子保持在稳定的旋转状态。
3.3 同步频率:同步机电的转速与电源频率相关,通常为每分钟60倍电源频率。
4. 动力输出4.1 转子的旋转:同步机电的转子通过磁场的吸引力和排斥力,以同步的方式旋转。
4.2 动力传递:转子的旋转动力可以通过轴传递到外部负载,实现机械能的转换。
4.3 高效能输出:同步机电的工作原理使其能够以高效能的方式输出动力,适合于各种应用领域。
5. 控制方法5.1 电流控制:通过控制定子线圈的电流,可以调整同步机电的转速和输出功率。
5.2 磁场控制:通过改变固定磁极的磁场强度或者方向,可以调整同步机电的工作特性。
5.3 频率控制:通过改变电源频率,可以调整同步机电的转速和输出频率。
总结:综上所述,同步机电的工作原理基于磁场的产生和电磁感应,通过磁场的同步运动和动力输出实现机械能的转换。
控制方法可以通过电流、磁场和频率的调整来实现对同步机电的控制。
同步机电以其高效能的特性在各个领域得到广泛应用。
同步电机的工作原理

同步机电的工作原理同步机电是一种常见的电动机,其工作原理基于电磁感应和电磁力的相互作用。
它由固定部份(定子)和旋转部份(转子)组成,通过交变电流产生的磁场来实现电能到机械能的转换。
1. 定子部份:定子是同步机电中的固定部份,通常由三个相互位移120度的绕组组成。
这些绕组被称为定子绕组,它们通过电源供电。
当电流通过定子绕组时,会在定子内产生一个旋转磁场。
这个旋转磁场的频率等于电源频率,通常为50Hz或者60Hz。
2. 转子部份:转子是同步机电中的旋转部份,通常由一个磁体组成。
转子内部有一个永磁体或者通过直流电源供电的绕组。
当定子绕组产生旋转磁场时,转子内的磁体味受到电磁力的作用,使得转子开始旋转。
转子的旋转速度与定子的旋转磁场的频率保持同步。
3. 工作原理:同步机电的工作原理可以分为两个阶段:启动和运行。
启动阶段:在启动阶段,同步机电需要通过外部的启动装置来匡助其达到同步速度。
启动装置可以是起动电阻、起动电容器等。
当机电启动时,启动装置会改变电路参数,使得机电能够旋转。
一旦机电达到同步速度,启动装置会被切断。
运行阶段:在运行阶段,同步机电会保持与电源频率同步运行。
定子绕组产生的旋转磁场和转子的磁体之间会产生电磁力,这个力会使得转子保持同步运行。
由于同步机电的转子速度与电源频率同步,因此它适合于需要稳定转速的应用,如电力系统中的发机电。
4. 特点和应用:同步机电具有以下特点:- 转速稳定:由于同步机电的转子速度与电源频率同步,因此它的转速非常稳定。
- 高效率:同步机电的效率较高,通常在90%以上。
- 大功率:同步机电适合于大功率的应用,如工业驱动和电力系统中的发机电。
- 复杂控制:同步机电需要较复杂的控制系统来实现同步运行。
同步机电广泛应用于各个领域,如工业生产线、电力系统、电动汽车等。
在工业生产线中,同步机电可以提供稳定的转速和较高的效率,用于驱动各种设备。
在电力系统中,同步机电作为发机电可以将机械能转换为电能。
同步电机的工作原理

同步机电的工作原理一、引言同步机电是一种常见的电动机,广泛应用于工业生产中。
了解同步机电的工作原理对于理解其性能和应用具有重要意义。
本文将详细介绍同步机电的工作原理,包括结构、原理和工作方式。
二、同步机电的结构同步机电由定子和转子组成。
定子是由三相绕组构成的,通常采用星型连接。
转子由磁体构成,通过轴承与机电的轴连接。
三、同步机电的工作原理1. 磁场产生同步机电通过定子绕组中的电流产生磁场。
当三相交流电通过绕组时,会形成旋转磁场。
这个旋转磁场是由电流在绕组中的相位差所决定的。
2. 磁场与转子的交互作用转子上的磁体与定子产生的旋转磁场相互作用。
由于磁体的磁性,转子会受到磁力的作用,导致转子开始旋转。
3. 同步运行由于定子产生的旋转磁场的频率与电源频率相同,转子的旋转速度与旋转磁场的速度保持同步。
因此,同步机电被称为同步机电。
四、同步机电的工作方式同步机电有两种常见的工作方式:同步发电和同步驱动。
1. 同步发电在同步发电中,同步机电作为发机电使用。
电源通过绕组提供电流,使得定子产生旋转磁场,而转子则被机械能驱动旋转。
旋转的转子通过感应产生电势,将电能转化为机械能。
2. 同步驱动在同步驱动中,同步机电作为驱动器使用。
电源通过绕组提供电流,使得定子产生旋转磁场,而转子则被外部机械装置驱动旋转。
同步机电通过转子的旋转产生磁场,将电能转化为机械能,从而驱动外部机械装置。
五、同步机电的优点和应用同步机电具有以下优点:1. 高效率:同步机电的效率较高,能够有效地转化电能为机械能。
2. 稳定性好:同步机电的转速稳定,能够保持与电源频率同步。
3. 调速性能好:同步机电可以通过调节电源频率或者改变绕组的连接方式来实现调速。
同步机电广泛应用于以下领域:1. 工业生产:同步机电常用于驱动工业生产中的机械装置,如泵、风机、压缩机等。
2. 发电厂:同步机电作为发机电使用,将机械能转化为电能。
3. 交通运输:同步机电在电动车、电车和高铁等交通工具中得到广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自同步振动及振动同步传动的机电耦合机理X熊万里1,2 闻邦椿1 段志善2(1东北大学机械工程与自动化学院 沈阳,110006)(2西安建筑科技大学机电工程学院 西安,710055)摘要 自同步振动和振动同步传动在机械工程上已获得成功应用,但是振动机械实现自同步振动和振动同步传动的过渡过程长期以来却一直不明确,利用现有的振动机械模型还不能定量解释系统从不同步到同步、或是从一种同步状态过渡到另一种同步状态的物理过程。
本文对此进行了专门的研究,在传统的振动机械模型基础上建立了电机-振动机械系统的机电耦合模型,利用该模型进行数值模拟对过渡过程中的一系列实际现象做出了合理的定量解释,揭示了自同步振动和振动同步传动的机电耦合机理。
关键词:振动;自同步;机电耦合;振动同步传动中图分类号:T H 113.1;T M 301.3引 言自同步振动和振动同步传动是振动利用工程中的一类特殊物理现象,在冶金、建材、煤炭等行业的物料筛分和物料输送设备中具有广泛用途,文献[1~2]对此曾做过系统深入的研究。
文献[1]从机械动力学的角度导出了自同步振动机械工作的同步条件和稳定性条件,为自同步机械的设计及调试奠定了理论基础。
文献[2]从能量传递的角度分析了振动同步传动的物理过程,并进行了实验研究。
近年来,同步研究已经发展到控制同步与振动同步相结合的组合同步阶段[3],即把电机系统和振动机械系统纳入到统一的机电系统中进行研究。
文献[4]从控制同步的角度研究了双机传动系统的定速比控制问题,文献[5~6]进一步研究了多机传动系统的智能控制问题。
由于同步经常与系统的非线性特性联系在一起,现在已有不少研究者开始进行非线性系统的混沌同步[7~8]研究。
这些研究大大深化了人们对同步问题的认识,把同步研究推进到一个新的水平。
但是经典的自同步理论中却还有许多问题未得到圆满解决,例如:自同步系统受到外界的扰动导致不同电机的转速和相位发生差异时,系统是如何自行恢复同步状态的;对于已经同步运动的自同步振动机械系统,切断一台电机的电源后,断电的电机为什么有时还能与未断电的电机继续同步运转,等等。
这些现象一直未从定量角度得到解释。
本文在文献[9~10]的基础上,建立了电机系统和振动机械系统的机电耦合数学模型,从机电耦合的角度定量再现了系统从不同步到同步、或是从一种同步状态过渡到另一种同步状态的过渡过程中系统各参量的变化规律,从而揭示了自同步系统的机电耦合同步机理。
第13卷第3期2000年9月振 动 工 程 学 报Journal of Vibration Engineer ing Vol.13No.3Sep.2000X 国家自然科学基金资助项目(编号:59875010)收稿日期:1999-04-22;修改稿收到日期:1999-11-101 电机-振动机械系统的机电耦合数学模型 电机-振动机械系统的力学模型如图1所示。
图中a 、b 两台电机及支撑弹簧相对于振动机对称布置,两电机在图中用两偏心块表示。
振动系统可能发生的运动为水平方向x ,竖直方向y 和扭摆方向W 的振动。
考虑到自同步振动和振动同步传动是振动机械系统在一定条件下的自组织行为,系统在实现同步或同步传动的过程中,两台电机之间及电机与振动机之间存在着复杂的能量交换关系,而这种关系只能在一个包含有三个子系统的动力学模型中才可能得到描述,本文建立的电机-振动机械系统的数学模型包括两部分,一部分是传统的振动机械模型,另一部分是两个电机子系统的数学模型。
图1 电机-振动机械系统的力学模型 振动机械模型可由拉格朗日力学原理直接导出。
本文参考文献[9]的数学模型,直接给出其数学表达式如下 Mx b +c x x a +k x x =m 0e (<õ2a cos <a -<õ2b cos <b )+m 0e (<¨a sin <a -<¨b sin <b ) (1) My b +c y y a +k y y =m 0e (<õ2a sin <a +<õ2b sin <b )-m 0e (<¨a cos <a +<¨b cos <b )(2) J W ¨+c W W õ+k W W =c 0(<õa -<õb -2W õ)-m 0el [<¨a sin(<a -W )-<õ2a cos(<a -W )]+ m 0el [<¨b sin(<b +W )-<õ2b cos(<b +W )](3) J 0<¨a =T ma-T f a -c 0(<õa -W õ)-m 0e [y b cos <a -x b sin <a ]-m 0el [W ¨cos(<a -W )-W õ2sin(<a -W )](4) J 0<¨b =T mb -T f b -c 0(<õb +W õ)-m 0e [y b cos <b +x b sin <b ]+m 0el [W ¨cos(<b +W )-W õ2sin(<b +W )](5)式中 M 和J 表示振动系统(包括电机及偏心块)的质量和转动惯量,e 表示偏心距离,l 为两电机的中心距;x ,y 和W 分别表示水平方向、垂直方向和扭振方向的位移,x a ,y a ,W ·,xb ,y b 和W¨分别表示相应方向的速度和加速度;m 0和J 0表示偏心块的质量和转动惯量;<a 和<b 表示两偏心块的角位移,<·a ,<·b ,<¨a 和<¨b 表示相应方向的角速度和角加速度;c x ,c y ,c W ,k x ,k y ,k W 分别为x 方向、y 方向和W 方向的阻尼和刚度;T ma ,T mb ,T f a 和T f b 分别为两电机轴上的电磁转矩和负载转矩。
对于电机系统,由于过渡过程中转子的转速是不断变化的,取随转子以同步转速旋转的MT 坐标系[10]作为参考坐标系可以得到两台电机的状态方程如下326 振 动 工 程 学 报 第13卷u M 1au T 1a=r 1a +p L sa -X 1L sa p L ma -X 1L ma X 1L sa r a 1+p L sa X 1L ma pL ma p L ma -(X 1-n p <·a )L m r ′2a +pL ra -(X 1-n p <·a )L ra (X 1-n p <·a )L ma p L ma (X 1-n p <·a )L ra r ′2a +pL ma i M 1a i T 1a i M 2a i T 2a (6)u M 1bu T 1b0=r 1b +p L sb -X 1L sb pL mb -X 1L mb X 1L sb r b 1+pL sb X 1L mb pL mb pL mb -(X 1-n p <·b )L mb r ′2b +p L r b -(X 1-n p <·b )L r b (X 1-n p <·b )L mb p L mb (X 1-n p <·b )L rb r ′2b +pL mb i M 1b i T 1b i M 2b i T 2b (7)式中 u ,i 表示电压和电流,角标1,2表示定子和转子,L s ,L r 和L m 分别表示定子相绕组、转子相绕组的自感和定转子相绕组之间的互感,n p 表示电机的磁极对数,X 1表示定子的电角速度;r 1和r ′2分别表示电机的定子电阻和转子折算电阻,p 在这里表示微分算子:p =d d t 。
两台电机的电磁转矩方程[10]为T ea =32n p L ma (i T 1a i M 2a -i M 1a i T 2a )(8)T eb =32n p L mb (i T 1b i M 2b -i M 1b i T 2b )(9) 两台电机的转子运动方程为H a <õa =T ea -T ma(10)H b <õb =T eb -T mb(11)式中 H a ,H b 分别代表两台电机转子系统的转动惯量。
式(1)~(11)合在一起即构成了电机-振动机械机电耦合系统的数学模型。
容易看出,该模型表示的是一个多变量耦合的非线性系统。
相比于传统的机械模型而言,该模型反映了振动机械系统和电机系统之间以及两个电机子系统之间的相互耦合关系。
下面作者以该模型为基础对自同步振动和振动同步传动的过渡过程进行研究。
2 自同步振动过渡过程的机电耦合行为自同步振动的过渡过程反映的是振动机械系统中两台电机及相应偏心块的转速和相位的变化规律。
根据工程实际经验,这种过渡过程常出现在振动机械的起动过程之中。
起动时由于振动系统的动力学参数和初始条件不可能完全对称,两电机在逐步加速至额定转速的过程中,其转速和相应偏心块的相位并不完全相等,因此激振力的大小和方向也在不断改变。
这种变化反映在振动机上就表现为振动的方向角和振幅不断发生变化,同时伴随着扭振发生。
随着两电机的转速和偏心块的相位逐步趋于一致,对于图1所示的振动系统而言,振动机水平方向和扭振方向的振动由于阻尼的耗散作用会逐步衰减掉,最后只剩下垂直方向的稳定的同步振动。
在本文中,由于作者所关注的是振动系统在受到外界干扰时自行恢复同步的能力,在下面的分析中,不直接研究系统的起动过程,而是以系统的同步状态作为初始状态,通过加入电机的转速扰动和相位差扰动来分析系统参数的变化规律。
对单纯的起动同步过程的研究限于篇幅本文不拟赘述。
327第3期 熊万里等:自同步振动及振动同步传动的机电耦合机理本文所研究的振动机由两台异步电动机(Y 80s -4型)带动偏心块驱动,机械系统的相关力学参数如下:M =180kg,m 0=4kg,J =50kgm 2,J 0=0.01kgm 2,c x =c y =1000Ns/m,c W =1000Ns/rad,k x =k y =78000N/m,k f =4900Nm/rad,g =9.81kg/s 2。