Kalman滤波在跌倒检测中的实验分析
基于无迹卡尔曼滤波和小波分析的IMU传感器去噪技术研究

现代电子技术Modern Electronics Technique2024年3月1日第47卷第5期Mar. 2024Vol. 47 No. 50 引 言中国疾控中心的数据显示,跌倒已经成为中国65岁及以上老年人受伤致死的首要原因[1] 。
跌倒的医疗结果很大程度上取决于发现是否及时,现有的商用跌倒检测系统主要分为三类,即视频式跌倒检测系统、基于环境传感器的跌倒检测系统、穿戴式跌倒检测系统[2⁃6]。
视频式跌倒检测系统是在人体活动区域内安装摄像头来获取图像,然后在PC 端对图像进行处理分析,以此来判断人体运动状态。
这种方法虽然检测精度较高,但是由于成本限制,无法对老人进行24 h 的看护。
环境传感器检测系统通常将红外传感器、压力传感器、毫米波雷达等传感器安装在室内对老人进行运动检测,文献[7]利用雷达感知技术,通过检测人体高度来判断人体运动状态。
然而这种方法的成本过于昂贵,很难普及到群众。
基于无迹卡尔曼滤波和小波分析的IMU传感器去噪技术研究阳兆哲, 李跃忠, 吴光文(东华理工大学 机械与电子工程学院, 江西 南昌 330032)摘 要: 获得精确的姿态信息是跌倒检测的关键。
文中在姿态角解算问题中提出一种基于无迹卡尔曼滤波和小波滤波的改进方法,通过Savitzky⁃Golay 滤波器和小波滤波融合算法对加速度计以及陀螺仪数据进行降噪处理,利用降噪后的加速度数据对陀螺仪数据进行PI 积分补偿,将补偿后的陀螺仪数据进行Mahony 解算,其结果作为无迹卡尔曼滤波的状态信息;其次通过加速度值解算,将其结果作为无迹卡尔曼滤波的量测信息实现姿态解算。
实验表明,在静态条件下,相对于常见的扩展卡尔曼滤波融合切比雪夫滤波算法,该方法使IMU 传感器原始加速度计精度提高了83.3%,姿态角标准差平均减少了0.001 93,能够有效地减少随机噪声。
零点漂移、高斯噪声对IMU 传感器姿态角信号的影响,使跌倒检测系统在复杂的环境条件下具有较高的精度以及稳定性。
一种改进的自动摔倒检测算法_刘红

Abstract: Fall detection is an important problem in the application research of video surveillance. Quick and effective ways of getting the information of the people falling to the ground can help the people get timely assistance to reduce further injury. This paper proposed an improved algorithm of automatic fall detection. Based on using human aspect ratio features to judge human movements,two features—effective area ratio and center variation rate were adopted in this algorithm to modify detection results. Misjudgments could be effectively prevented and the accuracy of detection results could be greatly increased. This algorithm had a less computing complexity and was easy to implement. Experimental results showed that the algorithm had good robustness.
老人防摔腰带的设计与实现
• 190•为守护老人身体健康,本项目设计了一种能够提前预测老人摔倒的腰带,以缓冲气囊为主,缓解摔倒后对人体的冲击力从而起到保护作用。
其凭借轻便美观及全自动工作过程在降低操作难度的同时保证了穿戴的舒适性,为保障老年人的健康安全提供了全新角度的解决方案。
1 老人防摔腰带总体设计1.1 功能设计本产品是一款基于单片机和气囊的老人防护产品。
通过传感器预测摔倒的发生,由控制器触发电磁阀使压缩气体充入气囊,在摔倒前及时弹出来保护老人的安全。
缓冲气囊经折叠后固定在人体的腰间,弹出后用于保护佩戴者的臀部、后腰以及大腿两侧,以此来大大减少摔倒后受到的伤害。
与此同时,我们的产品采取用户和家属实时关联的理念,在腰带上安装有警报装置,在老人摔倒后发出警报声来吸引周围人的注意,并且设有相关手机APP 与地图导航软件关联,可将老人摔倒位置信息发送给监护人,以此保障老人的安全,给予第一时间的救护。
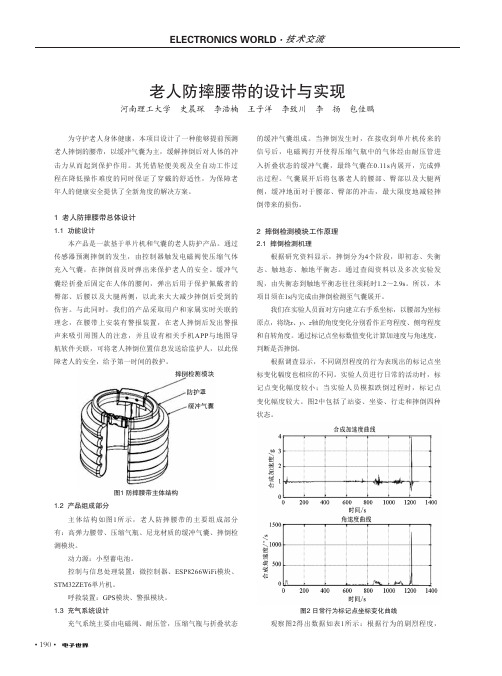
图1 防摔腰带主体结构1.2 产品组成部分主体结构如图1所示,老人防摔腰带的主要组成部分有:高弹力腰带、压缩气瓶、尼龙材质的缓冲气囊、摔倒检测模块。
动力源:小型蓄电池。
控制与信息处理装置:微控制器、ESP8266WiFi 模块、STM32ZET6单片机。
呼救装置:GPS 模块、警报模块。
1.3 充气系统设计充气系统主要由电磁阀、耐压管,压缩气瓶与折叠状态的缓冲气囊组成。
当摔倒发生时,在接收到单片机传来的信号后,电磁阀打开使得压缩气瓶中的气体经由耐压管进入折叠状态的缓冲气囊,最终气囊在0.11s 内展开,完成弹出过程。
气囊展开后将包裹老人的腰部、臀部以及大腿两侧,缓冲地面对于腰部、臀部的冲击,最大限度地减轻摔倒带来的损伤。
2 摔倒检测模块工作原理2.1 摔倒检测机理根据研究资料显示,摔倒分为4个阶段,即初态、失衡态、触地态、触地平衡态。
通过查阅资料以及多次实验发现,由失衡态到触地平衡态往往须耗时1.2~2.9s 。
所以,本项目须在1s 内完成由摔倒检测至气囊展开。
基于多传感器融合的老人跌倒检测
基于多传感器融合的老人跌倒检测作者:欧国维蒙山来源:《微型电脑应用》2020年第01期摘要:老年人跌倒受伤的问题已经随着人口老龄化显得非常突出,目前主流的跌倒检测算法既不实用也不准确。
为此提出一种新的基于加速度计、陀螺仪和磁力计的跌倒检测算法。
把人的活动姿势分平躺姿态和非平躺姿态,并假设在跌倒后检测到躺卧姿势。
检测算法分三步:四元数卡尔曼滤波,姿态识别,活动强度分析。
通过安装在腰部的九轴传感器采集数据,通过四元数卡尔曼滤波器,使系统可以获得在地面坐标系统中人体姿态矢量。
人体的姿态矢量包括欧拉角、四元数、加速度。
欧拉角用于确定平躺姿态和非平躺姿态,四元数和加速度用来分析平躺时的活动强度。
该算法具有计算量小、实时性好并且检测精度高、检测方便的特点。
关键词:老人; 跌倒检测; 欧拉角; 卡尔曼滤波方程; 姿态检测; 活动强度中图分类号: TP311 ; ; ;文献标志码: AFall Detecton for Elder People Based on Mult-sensor FusonOU Guowe, MENG Shan(College of Electroncs and nformaton Engneerng, Shenzhen Unversty, Shenzhen 518052)Abstract: Fall related njury s a central problem for the elder people. But prevalent methods are nether practcal nor useful n accuracy. Ths paper proposes a novel fall detecton algorthm usng accelerometers, gyroscopes and magnetometers. n our study, we dvde human actvtes nto two categores: lyng posture and no-lyng posture. We assume that a lyng posture s detected after falls. The proposed algorthm has three steps: quaternon Kalman flter, posture recognton, actvty ntensty analyss. The data are obtaned by usng nne-axal nertal measurement unt attached on the wast. Usng the quaternon Kalman fler, the system can obtan body's posture vectors measured n the frame of reference of the ground. The body's posture vectors nclude Euler angles, quaternon,acceleraton, etc. The Euler angles are used to determne the lyng posture or no-lyng posture. The quaternon and acceleraton are used to analyze actvty ntensty when lyng posture are detected. The proposed method features low computatonal cost and real-tme response. n addton, t has a nce accuracy and convenent n detect falls.Key words: Elder; Fall detect; Euler angle; Posture recognton; Actvty ntensty0 引言世界衛生组织(WHO)2016年9月报道指出跌伤是世界各地意外或非故意伤害死亡的第二大原因。
可穿戴式跌倒检测与预警系统研究

和测量值计算当前最优值: Matl’ixMul(K,H,Tempi,0NE,0NE,0NE); MaIrixMinus(I,Tempi,Tempi,0NE,0NE);
Ma【rixMuI(Templ,P,tcov.PNowopt,0NE,0NE,0NE);/计算更新
后 //1古计协方差矩阵;P(klk)=(I—Kg(k)*H)。P(kfk—I)
MatdxAdd(Temp l,Q,P,ONE,0NE);,/预测数据的 //协方差矩阵;P(klk—1)=A(k,k—1)+P(k一1『 k—1)4F(k,k—1)’+Q MatrixCal(H,P,Tempi,0NE); MatrixAdd(Temp 1,R,Tempi,0NE,ONE); GaussIjordan(Temp l,0NE);
跌倒检批模块
报警及定位摸块
location.LocationClient及com_baidu.10ca【ion.L0cationClien【0ption。
在发出报坐标到地址的转换服务.通过 向服务器发送包括经纬度信息在内的HrrllP请求,服务器返回JsON l-2模块功能 系统采用sTM32作为主处理器,接收来自陀螺仪、三轴加速度计 的数据和信号。执行算法进行数据处理.并在必要时通过蓝牙模块向 手机1发送报警信号.手机l接到报警信号后继续向手机2发出报警 短信或电话.同时给出警报所在的位置信息。 i轴加速度计。是测量载体x轴、v轴以及z轴方向上线加速度的 仪表.通过3个轴向的加速度判断跌倒动作。当然.仅通过三轴加速度 计是测不到转动的动作的,难以测量出完整的3D动作.所以进行跌 倒动作的判断还需要结合陀螺仪。陀螺仪可以对转动、偏转的动作做 很好的测量,这样就可以精确分析判断出使用者的实际动作。 数据.再通过Js0N解析获得地址信息。
Kalman滤波技术在地球化学数据处理中的应用

Kalman滤波技术在地球化学数据处理中的应用武飞;柳炳利【摘要】The conventional geochemical data processing problems, the introduction of Kalman ifltering for noise reduction on the geochemical data preprocessing, and Kalman ifltering techniques applied geochemical data error correction system feasibility studies and Tonglvshan 1:5 000 STREAM Cu in an example of the measurement data validation analysis results showed that, Kalman ifltering technique on geochemical data processing has advantages geochemical data for error correction.%针对传统地球化学数据处理问题,引入Kalman滤波对地球化学数据进行降噪预处理,并对Kalman滤波技术应用于地球化学数据误差校正的可行性进行了系统研究,并以铜绿山1:5万水系中Cu的测量数据为例进行了验证分析,试验结果表明,Kalman滤波技术在对地球化学数据处理方面具有优势,适用于地球化学数据的误差校正。
【期刊名称】《软件》【年(卷),期】2013(000)009【总页数】5页(P70-74)【关键词】Kalman滤波;地球化学数据;降噪【作者】武飞;柳炳利【作者单位】成都理工大学,成都 610059;成都理工大学数学地质四川省重点实验室,成都 610059【正文语种】中文【中图分类】P40地球化学数据预处理在整个地球化学数据的处理流程中占有重要地位,常规的方法往往人为的去除高值极易掩盖异常信息。
基于Kalman滤波器的故障诊断方法及其在铁道车辆中的应用-铁科院
第 27 卷第 1 期 2007年1月 文章编号 : 1008- 7842 ( 2007) 01- 0009- 04
0 0 c1 0 0 0 0 k1 0 0
0 0 0 c1 0 0 0 0 k1 0
0 0 0 c1 0 ,
x [ k + 1] = e ATk x [ k ] + A- 1 ( e ATk - I ) Bu[ k] 其中 T k = tk + 1 - t k , 为采样时间间隔。令 A = e AT k
( c21 + c22)l 2 - c21l c22l 0 0 0 2k 2l k 2l 0 0
2
- c21l 2c1 + c21 0 0 0 - k2 - k 2l 2k1 + k 2 0 0 0
,
- k 2 - k 2l
,
10
铁道机车车辆
第 27 卷
^
0 0 c1 [ Cf ] = 0 0 0 0 k1 [ Kf] = 0 0
, zV z#V
A- 2 e- A t cos( t +
^
^
∃e
t 0
^
- At
^
cos( t +
^
) d t = ( I + A- 2) - 1 [- A- 1e- At cos( t + ) + ) + A- 1 cos( ) - A- 2 sin ( ) ] ( 13)
基于Kalman滤波算法的陀螺仪动态漂移补偿研究
基于Kalman滤波算法的陀螺仪动态漂移补偿研究马正华;卢成俊;戎海龙;贺小捧【摘要】应用MEMS陀螺仪测量人体手臂运动姿态时,针对陀螺仪受线加速度干扰导致测量姿态发散的问题,提出基于Kalman滤波算法的姿态误差补偿方法;该方法首先将陀螺仪采集到的角速度通过方向余弦算法解算得到姿态角,并将陀螺仪动态漂移造成的姿态角误差视为时变信号,通过建立姿态角漂移误差的状态方程及观测方程,应用卡尔曼滤波算法,实现对姿态角漂移误差的估计,最终达到对陀螺仪动态漂移误差的补偿;实验与仿真结果表明,应用该算法能够有效的抑制线加速度干扰导致的陀螺仪测量的姿态发散,适用于陀螺仪对人体手臂运动姿态的测量.【期刊名称】《计算机测量与控制》【年(卷),期】2016(024)009【总页数】4页(P191-194)【关键词】姿态测量;方向余弦算法;卡尔曼滤波算法;姿态补偿【作者】马正华;卢成俊;戎海龙;贺小捧【作者单位】常州大学信息科学与工程学院,江苏常州 213000;常州大学信息科学与工程学院,江苏常州 213000;常州大学信息科学与工程学院,江苏常州 213000;常州大学信息科学与工程学院,江苏常州 213000【正文语种】中文【中图分类】TP3获取真实准确的人体运动姿态信息是对人体开展生物力学方面的研究和对人体的各种运动信息进行检测、跟踪以及统计分析的基础。
MEMS惯导器件由于体积小、成本低、易于数字化和动态测量特性良好等优点成为人体姿态测量的理想选择[1-3]。
对陀螺仪输出进行积分便能得到姿态信息[4],而由于本身特性的限制,MEMS陀螺仪的输出噪声以及随机漂移导致解算得到的姿态产生漂移误差[5-6],并随时间推移而累积增大,因此陀螺仪通常与其他姿态传感器组合使用获得稳定可靠的姿态信息。
目前传统的方法是采用融合算法,以加速度传感器、地磁传感器输出姿态角来修正陀螺仪的输出。
Sabatini AM提出了一种VSD-EKF(variable-state imension extend kalman filter)算法,该算法假设目标物体在缓慢移动,即假设载体没有线加速度干扰,用MARG 传感器估计人体三维姿态信息,但该算法解算精度只排除了环境磁场影响和陀螺仪随机误差影响,没有考虑到人体姿态变化带来的加速度变化导致加速度计干扰的情况[7]。
旋转机械振动信号的Kalman滤波及故障诊断
旋转机械振动信号的Kalman滤波及故障诊断赵锦剑;杨光永;周安然;项敏敏【摘要】对于一个稳定运行的旋转机械系统,其振动响应信号可以由自回归(AR)模型来描述.在此基础上提出了一种基于Kalman滤波原理的旋转机械振动信号处理方法.利用Kalman滤波算法估计出稳定系统振动响应信号的AR模型参数,并利用此模型建立Kalman滤波所需的状态空间方程,再结合Kalman递推算法构建一种新的振动信号滤波处理方法.并将此方法应用到旋转机械系统故障诊断中.研究结果表明:所用的方法能够有效地消除旋转机械振动信号中的噪声和检测出振动信号中的微弱突变信息.【期刊名称】《仪表技术与传感器》【年(卷),期】2014(000)005【总页数】4页(P80-83)【关键词】Kalman滤波;AR模型;振动信号;状态空间方程;突变信息;故障诊断【作者】赵锦剑;杨光永;周安然;项敏敏【作者单位】云南民族大学电气信息工程学院,云南昆明650504;云南民族大学电气信息工程学院,云南昆明650504;华南理工大学机械工程学院,广东广州510640;云南民族大学电气信息工程学院,云南昆明650504;云南民族大学电气信息工程学院,云南昆明650504【正文语种】中文【中图分类】TB535+.20 引言机械系统振动信号处理及故障诊断方法包括自适应滤波[1]、高阶谱分析[2]以及独立分量分析(ICA)[3]等。
自适应滤波适用于较复杂的机械振动信号处理,它具有很强的自学习和自跟踪能力,能够通过系统辨识来对某一未知的动态系统进行逼近。
高阶谱是分析非平稳信号和非高斯信号的有力工具,可以定量地描述信号中与故障密切联系的非线性相位耦合。
Yang[4]等研究了利用双谱分析定量地描述信号中与机械故障密切联系的二次相位耦合的方法,进而对转子故障进行诊断。
但常规的双谱分析只以单通道信息为研究对象,不能完全地反映旋转系统的非线性特征,从而影响了故障诊断的准确性。
Kalman滤波在室内定位动态测量中的应用
l
( l m3 1 一 m2 1 ) + ( 1 m3 2 - m2 2 ) y
l 1 l
0 P I 与O 两 条 射线 的交 点 。这 里 系统 采 用 三个 摄 像
头 两 两 交 汇 得 到空 间点 的三 个 位 置 坐 标 .来 提 高 系统 测 量 的 精 度
) 的结 果 为 :
P: l Y l = ( A r A) 一
( 5 )
I J
其中:
l l 1 1 l I
m l 3
1 2 3
m 1 4
1
Ml m 3 l— m l 1
I tl m 3 2一 m 1 2
1 l
图形 图像
— — —
—
—
物 体 三 维 信 息 的过 程 [ 6 1 而本 文 的室 内定 位 测量 是 利 用
坐 标 系 下 的齐 次 坐标 。从 而 得( U l m3 l — ml 1 )
1 1
的 四个
双 目立 体 视 觉 定 位 原 理 .即采 用 两 个 摄 像 头 在 针 孔 成 像模型下 . 如 果 摄 像 头 光 心 和像 点 已知 . 就 可 以确 定 这 两点组成的唯一射线 . 而 物 点 必 然 在 此 射 线上 由两个 摄 像 头 进 行 交 汇 就 有 两 条 这 样 的射 线 .射 线 相 交 于 物
+( 1 3 一 m2 3 ) = m2 4 l m3 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Kalman滤波在跌倒检测中的实验分析作者:李文阳
来源:《科学与信息化》2020年第20期
摘要为了能够更好地研究老年人的跌倒检测的准确性和实时性,在基于kalman滤波的跌倒检测理论方法基础上进行实验分析。
采用kalman滤波对目标中心点的运动轨迹进行预测,将人体中心点的实际运动轨迹和预测运动轨迹进行匹配,通过误差比较来判断老人是否发生跌倒。
实验结果表明,该方法可以尽可能地弥补传统视频检测技术检测率低和实时性差的问题,可为老人意外跌倒提供了安全保障。
关键词跌倒检测;kalman滤波;误差分析
1 实验过程
当老年人发生跌倒时,老人的运动质心轨迹会发生一个阶跃式的变化,与正常行走时的轨迹有非常大的偏差,我们利用kalman滤波对老人行走的轨迹进行跟踪,考虑到老人的特殊性,本文选取不同的实验人员进行模拟跌倒,过程分为正常行走,跌倒,站起,实验过程中我们用绿色的框标出检测到的实验者,用红色的框预测实验者下一帧的位置,图1中所展示的是实验者的检测状态,实验者的质心用红色的星形标出来。
实验过程中,我们以kinect V2 摄像头为基准建立空间坐标系,实验选取从一系列的实验者跌倒视频中选取连续的140帧作为研究对象,用kalman 滤波对实验者的质心进行跟踪预测,得到质心在空间坐标系中的运动轨迹如图2。
从图2中我们能发现当人正常行走时,人体质心点的位移几乎没有发生变化因此100帧之前和130帧之后运动目标的质心运动轨迹较为平缓,虽有波动,但幅度不是很大,从第100帧开始,质心位移就发生了阶跃性的变化直到115帧左右达到顶峰,直到130帧时轨迹又趋于平缓,通过大量实验对比发现,在第100帧到130帧这个时间内实验者经历了从开始跌倒,跌倒在地到又站立起来这一系列的过程。
因此,本文的研究方法是有效可行的[1]。
2 误差分析
为了进一步研究跌倒时刻实验者的真实运动轨迹和预测运动轨迹的误差阈值,我们选取了3位实验者分别采取了快速向前跌倒,快速向后跌倒,快速侧倒,缓慢向前跌倒,缓慢向后跌倒,缓慢侧倒等姿势进行了大量模拟实验,获取的运动轨迹数据进行处理后,得到了误差和帧数之间的变化曲线,如图3所示
图3展示的是3位实验者以不同的姿势从正常行走到发生跌倒时的误差曲线图,从图中可以发现在100帧之前误差在0附近上下波动,波动范围在-0.2-0.6之间,参照图3的质心运动轨迹图可知,这段时间实验者在正常行走,属于正常波动范围,在第100帧左右时误差值突然达到了0.8,这是因为kalman滤波预测是根据上一帧数据来预测下一帧数据,而在当前帧时实验者发生了跌倒,导致实际质心位置和预测质心位置发生大的偏差,过了当前帧,实际质心轨迹和预测质心轨迹又回到了正常阈值范围,当实验者从跌倒在地到站立起来这个过程中,同样在117帧左右的位置误差超出了正常阈值范围。
通过实验证明我们的误差阈值范围大于0.6时,我们可判断老人发生可跌倒[2]。
3 实验结果与分析
为了验证检测系統的有效性,实验设置了6个实验场景,分别为快速向前跌倒,快速向后跌倒,快速侧面跌倒,缓慢向前跌倒,缓慢向后跌倒,缓慢侧面跌倒,实验者为3位。
每个人在不同的场景中做了10次跌倒实验,在不同场景中的跌倒检测率如表1所示。
通过表1的检测率可以发现,当实验者快速跌倒时的检测率明显高于缓慢跌倒的检测率,这是因为kalman滤波在对实验者的质心轨迹跟踪预测时由于相邻两帧之间的质心Y轴方向位移变化过于缓慢,系统有可能认为老人在慢慢蹲下,不属于跌倒行为,当我们把误差阈值稍微扩大一点就会发现缓慢跌倒时的检测率明显上升了,为了进一步研究老人缓慢跌倒的决定因素,文章下一步将会研究kalman增益的变化情况,通过研究增益曲线来是检测率尽可能提升[3]。
4 结束语
本文把kalman滤波应用到跌倒检测中,通过实验者运动轨迹质心点预测值与实际值之间的误差来判断老人是否发生跌倒,能够实时的对老人的行为进行监控,很大程度上克服了传统跌倒检测方法对依赖传感器的束缚,实验表明,本文检测方法能够准确计算出老人在空间坐标系中的坐标,并且用kalman滤波能迅速有效的跟踪预测老人的行为,最大限度地避免老人因跌倒造成不可挽回的损失,为了更加有效的检测跌倒,下一步将会融合骨骼传感技术,实现24小时无间断的监测
参考文献
[1] 吴琼.中国人口老龄化背景下的城市老年人社会支持网研究[D]. 大连:东北财经大学,2011.
[2] Noury N,Fleury A,Rumeau P,et al. Fall detection - Principles and
Methods[C].International Conference of the IEEE Engineering in Medicine & Biology Society. Conf Proc IEEE Eng Med Biol Soc,2007:1663.
[3] 蔡靖,樊毅尧,董子健,等.基于穿戴式平台的老人摔倒监测系统设计[J].传感器与微系统,2017,36(7):130-133.
作者简介
李文阳(1991-),男,湖北人;毕业院校:湖北工程职业学院,专业:计算机,学历:研究生,职称:讲师,现就职单位:湖北工程职业学院,研究方向:通信。