第3章传感器系统静态特性建模资料
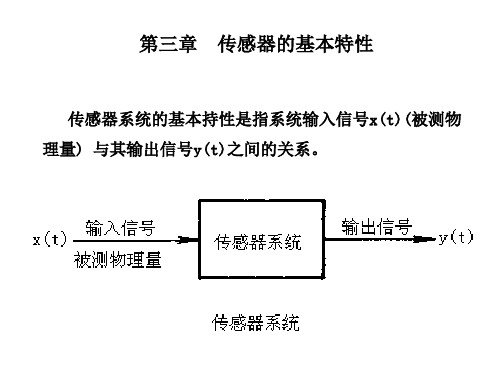
第三章 传感器的静态特性和动态特性讲解
例1:一阶传感器的频率响应,系统输入量(压力) F 为F(t)= b0 x(t ),输出 量为位移y( t ),不考虑运动。
解:①列出微分方程
a1
dy dt
a0
y
b0
x
②作拉普-拉斯变换
Y (S )(a1S a0 ) b0 X (S )
③令H(S )中的S =jω,即σ= 0
H ( j ) Y (S ) b0 X (S ) ja1 a0
ΔLj=(b+kxj)-yj
均方差函数为: 取其极小值,有:
4)总精度 系统的总精度由其量程范围内的基本误差与满度值Y(FS)之
比的百分数表示。基本误差由系统误差与随机误差两部分组成, 迟滞与线性度所表示的误差为系统误差,重复性所表示的误差 为随机误差。
总精度一般可用方和根来表示,有时也可用代数和表示。
统示值范围上、下限之差的模。当输入量在量程范围以内 时,系统正常工作并保证预定的性能。
对于4-20mA标准信号,零位值 yo=so=4mA,上限值 yfs=20mA,量 程 y(FS)=16mA。
3)灵敏度 S 输出增量与输入增量的比值。即
① 纯线性传感器灵敏度为常数:S=a1。
② 非线性传感器灵敏度S与x有关。
4)分辨率
在规定的测量范围内,传感器所能检测出输入量 的最小变化值。有时用相对与输入的满量程的相对 值表示。即
2、静态特性的性能指标
1) 迟滞现象(回差EH )
回差EH 反映了传感器的输 入量在正向行程和反向行程全 量程多次测试时,所得到的特 性曲线的不重合程度。
2) 重复性 Ex (不重复性) 重复性 Ex 反映了传感器在输入量按同一方向(增或减)全
第三章测试系统特性2-静态特性

传感器与测试技术
第3章 测试系统的特性
静态标定步骤:
作输入-输出特性曲线(重复、正反行程)
求重复性误差
求作正反行程的平均 输入-输出曲线 求回程误差 求作定度曲线 求作拟合直线,计算 线性度和灵敏度
航海学院
定度曲线 拟合直线
传感器与测试技术
第3章 测试系统的特性
例题:某称重传感器测量范围为0—80Kg,线性度为 2%,两线输出方式,传感器工作电压为24 v,输出 信号为1—5v。 (1)下表为该传感器标定数据,试判断该传感器精 度是否达到设计指标?
航海学院
传感器与测试技术
第3章 测试系统的特性
b)线性度(linearity——非线性度non-linearity )
定度曲线与拟合直线的偏离程度,用线性误差表 示,即用系统标称输出范围(全量程)A内,定度曲 线与拟合直线的最大偏差表示。通常表示成相对误 差形式。
y
L
A Lmax
L max A
=0.02mA/C表示温度变化1C电流变化的特性
g) 分辨力(率) (Resolution )
指能引起输出量发生变化时输入量的最小变化量, 表明测试装置分辨输入量微小变化的能力。 •对于数字式仪表而言,输入量连续变化时,输出量 作阶梯变化,一般可以认为该输出显示标尺的最后 一位所表示的数值就是它的分辨力,例如数字式温 度计的温度显示为180.6℃,则分辨力为0.1℃; •对于模拟式仪表,即输出量为连续变化的装置,分 辨力是指测试装置能显示或记录的最小输入增量, 一般为最小分度值的一半。 阈值:输入零点附近的分辨力。
传感器与测试技术
第3章 测试系统的特性
e)精度(Accuracy )
评定测试系统产生的测量误差大小的指标,其定 量描述方式包括: (1)用测量误差来表征
传感器的静特性课件

传感器材料
传感器的工作环境也会对其重复性产生影响。例如,温度、湿度、压力等环境因素的变化,都可能影响传感器的重复性。
传感器工作环境
优化传感器内部结构
01
通过优化传感器内部结构,可以提高其重复性。例如,优化弹性体结构、减小摩擦等措施,都可以提高传感器的重复性。
选择稳定的材料
02
选择稳定的材料可以保证传感器在各种工作条件下都能保持稳定的输出值,从而提高其重复性。
改良工作环境
03
通过改良传感器的工作环境,可以减小环境因素对传感器输出的影响,从而提高其重复性。例如,保持恒温、恒湿、恒压等环境条件,都可以提高传感器的重复性。
05
CHAPTER
传感器的迟滞性
传感器在正反行程中输出-输入曲线不重合的现象。
老化与磨损
03
CHAPTER
传感器的灵敏度
01
02
灵敏度越高,表示传感器对输入变化的响应越快、越准确。
灵敏度:传感器输出变化量与输入变化量的比值,表示传感器对输入变化的响应程度。
外部环境因素
温度、湿度、压力、电磁干扰等环境因素对传感器灵敏度产生影响。
传感器本身特性
不同类型和结构的传感器具有不同的灵敏度。
加强环境控制
定期对传感器进行校准和维护,及时发现和修复可能影响稳定性的问题。
定期校准和维护
THANKS
感谢您的观看。
迟滞性
由于传感器内部的摩擦阻力、弹性元件的滞后等因素所致。
迟滞性产生的原因
迟滞性通常表现为输出量与输入量不成线性关系,导致测量误差增大。
传感器的性能和指标静态特性
_
§ 4.2 传感器的性能和指标 静态特性-线性度
传感器非线性特性线性化:
y
yF•S Δmax
O
xm
x
式中: e1 ——非线性误差 (线性度) Δ最大——最大非线性绝对误差 y F S ——满量程输出量
§ 4.2 传感器的性能和指标 静态特性-漂移
测试系统在输入量不变时,其输出发生变化的现象 称为漂移。
x O
器
频 域 响 应 特 性
幅频特性
相频特性
传感器输入输出特性的一般表达式:
y a0 a1 x a2 x an x
则 y a1 x+a2 x a4 x ,为
2 4
2
n
情况三:若a0 a3 a5 =an ( 0 n为大于3的奇数),
仅有偶次非线性项情况
_
y
+ + x
其线性范围窄, 较少采用
y
灵敏度漂移
漂移分两种: 1)零点漂移 2)灵敏度漂移
零 点 漂 移
x
§ 4.2 传感器的性能和指标 静态特性-迟滞
迟滞是表明传感器输出一输入特性曲线在正行程时 与反行程时的输出量不重合的程度。
式中Δ m 为正反行程输出值 间最大差值。
§ 4.2 传感器的性能和指标 静态特性-重复性
重复性表示传感器在按输入量同一方向作全量程多 次测试时所得特性曲线不一致性程度。
Imin~Imax
称为测量范围,也称量程.
Imax - Imin
量程 =
§ 4.2 传感器的性能和指标 静态特性-灵敏度
S 输出量的变化 输入量的变化 = dy dx
线 性 系 统 灵 敏 度
y
传感器的静态特性PPT课件
式中:y —— 输出量; x —— 输入量; a0 —— 零点输出; a1 —— 理论灵敏度;
a2、a3,…,an —— 非线性项系
数
第13页/共59页
传感器的静态特性
衡量传感器静态特性的主要指标
①量程
②分辨力
③阈值
④灵敏度
⑤重复性
⑥迟滞
⑦线性度
⑧精度
第39页/共59页
3.32..11.4每传个感标器定的点基上本只特有性一个测量值的情况
注意:相关性分析——相关系数R
第40页/共59页
3.32..11.4每传个感标器定的点基上本只特有性一个测量值的情况
1阶拟合: y 0.0192x 0.0813 R2 0.9925
6阶拟合: y 1*10 -13 x6 - 2 *10 -10 x5 8 *10 -8 x 4 。。。 R2 0.999
示,即
滞后的处理:敏感元件优化
第20页/共59页
传感器的静态性能
6.重复性
重复性指传感器输入量按同一方向作全 量程连续多次变动时所得曲线不一致的程度。
具体计算方法是先分别测出正、反行程 多次测量的各个测试点的最大偏差,再取2者 中的最大值,按下式计算
重复性比线性度重要的多
第21页/共59页
传感器的静态性能
1.1 信号的形式
第4页/共59页
第5页/共59页
1.1 信号的(形2式) 智能传感器
被测量
传感器
预处理及输 入接口
微处理器
输出接口
执行机构 或
显示记录
智能传感器的结构
第6页/共59页
智能传感器的功能
1)自补偿功能 3)自诊断功能 5)双向通信功能
传感器的静态特性

传感器静态特性的一般知识传感器作为感受被测量信息的器件,总是希望它能按照一定的规律输出有用信号,因此需要研究其输出――输入的关系及特性,以便用理论指导其设计、制造、校准与使用。
理论和技术上表征输出――输入之间的关系通常是以建立数学模型来体现,这也是研究科学问题的基本出发点。
由于传感器可能用来检测静态量(即输入量是不随时间变化的常量)、准静态量或动态量(即输入量是随时间而变化的量),理论上应该用带随机变量的非线性微分方程作为数学模型,但这将在数学上造成困难。
由于输入信号的状态不同,传感器所表现出来的输出特性也不同,所以实际上,传感器的静、动态特性可以分开来研究。
因此,对应于不同性质的输入信号,传感器的数学模型常有动态与静态之分。
由于不同性质的传感器有不同的内在参数关系(即有不同的数学模型),它们的静、动态特性也表现出不同的特点。
在理论上,为了研究各种传感器的共性,本节根据数学理论提出传感器的静、动态两个数学模型的一般式,然后,根据各种传感器的不同特性再作以具体条件的简化后给予分别讨论。
应该指出的是,一个高性能的传感器必须具备有良好的静态和动态特性,这样才能完成无失真的转换。
1. 传感器静态特性的方程表示方法静态数学模型是指在静态信号作用下(即输入量对时间t 的各阶导数等于零)得到的数学模型。
传感器的静态特性是指传感器在静态工作条件下的输入输出特性。
所谓静态工作条件是指传感器的输入量恒定或缓慢变化而输出量也达到相应的稳定值的工作状态,这时,输出量为输入量的确定函数。
若在不考虑滞后、蠕变的条件下,或者传感器虽然有迟滞及蠕变等但仅考虑其理想的平均特性时,传感器的静态模型的一般式在数学理论上可用n 次方代数方程式来表示,即2n 012n y a a x a x a x =+++⋯+ (1-2)式中 x ――为传感器的输入量,即被测量;y ――为传感器的输出量,即测量值;0a ――为零位输出;1a ――为传感器线性灵敏度;2a ,3a ,…,n a ――为非线性项的待定常数。
机器人传感器技术基础:传感器的静态特性
0
x
图 重复性
3.重复性:
R
Rm a x yFS
100 %
4.迟滞(回差滞环)现象:
表明传感器在 正向行程和反
y yFS
向行程期间,
ΔH
输出-输入特性
xFS
曲线不重合的
0
程度。
x 图 迟滞特性
对于同一大小的输入信号x,在x连续增大的行程中, 对应某一输出量yi,与在x连续减小的行程中,对应 某一输出量yd之间的差值叫滞环误差,即所谓的迟
滞现象。
在整个测量范围内产生的最大滞环误差用∆m表示,
它与满量程输出值的比值称最大滞环率:
Байду номын сангаас
H
H max 100 % yFS
5.分辨率与阈值 :传感器在规定的范围所能检测输入量 的最小变化量。 阈值是使传感器的输出端产生可测变化量的最小被测输入 量值,即零点附近的分辨力。如下测温仪分辨率为0.1。
2.灵敏度:在稳态下输出增量与输入增量的比值:
Sn
dy dx
df x
dx
f
'x
对线性传感器,其灵敏度就是它的静态特性的斜率:
k y x
非线性传感器灵敏度是一个变量,只能表示传感器 在某一工作点的灵敏度。
3.重复性: 输入量按同一方向
y
Rmax2
作全程多次测试时,所得
特性曲线不一致的程度。
Rmax1
5.分辨率与阈值 :传感器在规定的范围所能检测输入量 的最小变化量。 阈值是使传感器的输出端产生可测变化量的最小被测输入 量值,即零点附近的分辨力。如下测温仪分辨率为0.1
6.稳定性:在室温条件下,经过相当长的时间间隔, 传感器的输出与起始标定时的输出之间的差异。
传感器的静态特性
x iyi −
∑ ∑ n
x
2 i
−
x i
yi
xi 2
∑ ∑∑ ∑(∑ ∑) b =
x
2 i
yi −
x i
xi yi
n
x
2 i
−
xi 2
2 灵敏度
Chapter1 传感器的一般特性
传感器的灵敏度是指到达稳定工作状态时,输出变 化量与引起此变化的输入变化量之比
Y
输出变化量 K = 输入变化量
= ∆Y ∆X
Chapter1 传感器的一般特性
在分析、设计和应用传感器时,传递函数的概念非常有 用。它的另一个作用是在方框图中作表示系统动态特性的 图示符号。 传递函数是输出信号与输入信号之比。
( ) ( ) W D
=Y X
D
=
bmDm anDn
+bm−1Dm−1 +Λ +b1D+b0 + an−1Dn−1 +Λ + a1D+ a0
Chapter1 传感器的一般特性
an
Sn
+ an −1S n −1 +Λ
+a1S
+ a0Y (S )
= bmSm
+bm−1Sm−1+Λ
+b1S
+b0
X
(S)
1.零阶传感器的数学模型 零阶传感器的系数只有a0,b0; K为静态灵敏度
Chapter1 传感器的一般特性
§1-1 传感器的静态特性
Chapter1 传感器的一般特性
静态标准条件
1.没有加速度、振动、冲击
(除非这些参数本身就是被测量);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ym=fm(s1, s2,···, sn) sn=f ’n(y1, y1,···, ym)
传感器系统静态特性建模技术 ——建模方法分类
按是否求取参数分:
1) 参数拟合建模 设定某个模型,以实现对数据拟合,确定该模型的
传感器系统静态特性建模技术(1) ——插值法
从数学上加以概括,可得到样条函数的定义如下:
三次样条函数记作S(x),a x b,满足:
①在每个小区间 [xi , xi1] (i 0,1, , n 1)是三次多项式。 ②在每个内节点 xi (i 1, , n 1) 上具有二次连续导数。
③ S(xi ) yi ,i 0,1, , n
传感器系统静态特性建模技术
——传感器系统模型
(2)多传感器系统 1)多传感器系统结构
Sensor1 y1
s1 s2
Sensor2 y2 ym
计算机或 S 微处理器
检测结果
sn Sensorm
2)建模所要做的工作:
y1=f1(s1, s1,···, sn) s1=f’1(y1, y2,···, ym)(a)获取标定数据;
三角法(线性插值),临近点取值法,多维曲面插值 法。
2)参数拟合建模法 常采用多项式模型,最小二乘法拟合
传感器系统静态特性建模技术(1) ——插值法
(1)线性插值法 T
特点:1)方法简 单,实现容易, 计算量小;2)逼 近精度低。
T(U5) T(U4)
0
U4 Ux U5
U
T
(U x
)
T
(U 4
)
T
(x xn ) (xi xn )
Tn (x)
n
li (x) yi
i0
n
i0
n j0
x xj xi x j
yi
ji
拉格朗日插值法由于存在龙格效应问题,在实践中并
不常用。
传感器系统静态特性建模技术(1)
——插值法 T
被逼近 曲线
T(U5) T(U4)
逼近曲线
误差 曲线
0
U4 Ux U5
U
(U5 ) U5
T (U4 U4
)
•
(U
x
U4
)
传感器系统静态特性建模技术(1)
——插值法
(2)最临近点法 T
把最临近输入
点的输出值作 为该点的输出。 T(U5)
如U于T(xU右是距5)图T离。(U中最x)U近=x,与
T(U4)
特点:1)方法简
单;2)这种方
法不产生新的
0
值,逼近精度
差
U4 Ux U5
U
传感器系统静态特性建模技术(1) ——插值法
(3)多项式插值法
由泰勒级数可知:
f (x) y0 y '0
(x
x0
)
1 2!
y
''0
(x
x0
)2
因此,传感器的逆函数可以用多项式来近似。
已知函数y=f(x)在m个点xi处的函数值及倒数值yi,•••,yj(r1),为求f(x)的近似简单函数φ(x),应当要求φ(x)满足条
传感器系统静态特性建模技术 ——传感器系统模型
(1)单传感器系统 1)单传感器系统结构
s
Sensor
y
计算机或 s 微处理器
检测结果
y=f (s)
s=f (y)
2)建模所要做的工作: (a)制作样本(s(1),y(1)), (s(2),y(2)), ···,(s(N),y(N)); (b)确定函数s=f (y)
传感器系统静态特性建模技术(1)
——插值法
又l0(x0)=1,于是让l0(x)的分母为(x0-x1)(x0-x2) ••• (x0-xn) 即可。依此类推,可得到
li
(x)
(x x0 ) (xi x0 )
(x xi1)(x xi1) (xi xi1)(xi xi1)
于是可以获得拉格朗日插值通式:
x1) T ( x1 x0
x0 T x0
x0 )
( x1
•
)
(
x
x0
)
依此类推可得 Tn(x)=l0(x)y0+ l1(x)y1 +•••+ ln(x)yn
且 l0(x0)=1, l0(x1)=0, l0(x2)=0, •••, l0(xn)=0
明显地:l0(x)含有因式(x- x1)(x- x2) ••• (x- xn)时,可使得 l0(x1)=0, l0(x2)=0, •••, l0(xn)=0。
龙格效应
传感器系统静态特性建模技术(1)
——插值法
2) 三次样条多项式插值法
所谓样条(Spline),本来是指一种绘图工具, 它是一种富有弹性的细长木条,在飞机或轮船 制造过程中,被用于描绘光滑的外形曲线。使 用时,用压铁将其固定在一些给定的节点上, 在其他地方任其自然弯曲,然后依样画下的光 滑曲线,就称为样条曲线。它实际上是由分段 三次曲线拼接而成,在连续点即节点上,不仅 函数自身是连续的,而且它的一阶和二阶导数 也是连续的。
参数的过程。常用方法为最小二乘法(多项式回归)。 (2)无参数拟合建模
只关心由数据得到的平滑曲线/曲面,并不关心拟合 参数,采用方法为插值法(三次样条插值)。
传感器系统静态特性建模技术 ——建模方法
按模型自变量个数(传感器个数)划分可分为:
(1)单输入-输出模型建模 1)无参数拟合建模法: 插值法,临近点取值法 2)参数拟合建模法:选定模型,求参数。 (2)多输入-输出模型建模 1)无参数拟合建模法
传感器系统静态特性建模技术(1)
——插值法
1) 拉格朗日多项式插值法
满足插值条件:Pn(xi)=yi=f(xi),i=0,1,•••,n的n次多项式称 为函数y=f(x)的拉格朗日插值多项式。
线性插值表达式
可改写为:
T (x)
T (x) T (x0
x x0
x1 x1
T
(x0
)
)
T(
x x1
件φ(xi)=yi, φ(xi)=yj, ••• 。这种条件称为插值条件, φ(x)称为插值函数, f(x)称为被插函数,x0,x1,•••,xm称 为插值节点,最小节点与最大节点之间的区间称为
插值区间。
传感器系统静态特性建模技术(1) ——插值法
多项式插值法类别:
拉格朗日插值法; 逐次线性插值法; 牛顿插值法; 样条插值法; Sinc函数插值法。
由三次样条函数中的条件①知,S(x)有个4n待定系数。 由条件②知,S(x)在n-1个内节点上具有二阶连续导数,
即满足条件:
S (xi 0) S (xi 0) S '(xi 0) S '(xi 0) S(xi 0) S "(xi 0)