69、零基础51单片机教程 声音传感器模块
基于51单片机的语音识别系统设计的设计思路
基于51单片机的语音识别系统设计的设计思路
基于51单片机的语音识别系统设计一般分为以下几个部分:
1. 语音输入模块:这一部分需要一个语音输入模块,用于采集用户的语音信号。
一般常用的语音输入模块有麦克风、语音识别芯片等。
2. 信号处理模块:对采集到的语音信号进行预处理和特征提取处理,以便进行后续的识别处理。
主要的处理过程包括信号滤波、特征提取、特征参数处理、信号识别等。
3. 语音识别模块:根据信号处理后得到特征参数,使用语音识别算法对输入的语音进行识别,将语音信号转换成文本信息,表示用户交互的意图。
4. 控制处理模块:通过上述处理得到用户的控制信息,根据不同的控制信号执行对应的操作,如控制LED灯、语音合成等。
5. 外围控制模块:根据用户的需求,可以添加外围控制模块,包括LED灯、电机、蜂鸣器等,以实现更多实际应用需求。
整个系统的设计需要详细分析每个模块的功能和实现,根据实际应用需求进行硬件选型和系统设计,同时对系统进行综合测试和性能评估。
单片机与传感器应用实例
VD2= 1; VD3=0; delay(); VD3= 1; VD4=0; delay(); VD4 = 1; VD5=0; delay(); VD5= 1; VD6=0; delay(); VD6 = 1; VD7=0; delay(); VD7= 1; VD0=0; delay(); } }
{ delay1s(); Second++; if(Second==60) { Second=0; }
P0=table[Second/10]; P2=table[Second%10];
} }
2.动态显示程序 #include <AT89C52.H> unsigned char code table1[]={0x06,0x5b,0x4f,0x66,0x6d}; //“1-5”字 符代码 unsigned char code table2[]={0x76,0x79,0x38,0x38,0x3f}; //“HELLO” 字符代码 unsigned char i,j; unsigned char a,b; unsigned char temp;
dis_buf[1]=(uchar)(dat1%10); //个位 if(dis_buf[0]==0) i=1; return(i); }
五、任务总结
红外距离检测仪的设计包含了数码管的识别、传感器型号的选择、模数转换、传感器与单片机两者共同完成的 一个较大的项目。在接下来的理论学习中,将深入介绍这些理论知识。
七、任务拓展训练
利用单片机设计一个交通灯,十字路口的红绿灯交替点亮和熄灭,并用LED灯显示倒计时。
1、东西绿灯亮,南北红灯亮 2、黄灯亮 3、东西红灯亮,南北绿灯亮。
67、零基础51单片机教程 热敏感应模块

第一种线材---杜邦线---颜色有多种--注:后继各种模块 全部按照本方法接线
模块:S ---接开发板(信号输入 P2.0脚) 模块:V--- 接开发板VCC针脚 模块:G---接开发板GND针脚
模块统一防插反接口
模块:S ---接开发板(信号输入脚) 模块:V--- 接开发板VCC针脚 模块:G---接开发板GND针脚
●TI,发送中断标志位。在方式0时,当串行发送第8位数 据结束时,或在其它方式,串行发送停止位的开始时,由 内部硬件使TI置1,向CPU发中断申请。在中断服务程序 中,必须用软件将其清0,取消此中断申请。
●RI,接收中断标志位。在方式0时,当串行接收第8位数 据结束时,或在其它方式,串行接收停止位的中间时,由 内部硬件使RI置1,向CPU发中断申请。也必须在中断服 务程序中,用软件将其清0,取消此中断申请。
模块使用说明
• 1、热敏电阻模块对环境温度很敏感,一般用来检测周围环境的温度; • 2、通过对电位器的调节,可以改变温度检测的阀值(即控制温度值),
如需要控制环境温度为50度时,模块则在相应环境温度调到其红灯亮,S 则输出低电平,低于此设定温度值时,输出高电平,红灯不亮; • 3、S输出端可以与单片机直接相连,通过单片机来检测高低电平,由此 来检测环境的温度改变; • 4、S输出端可以直接驱动本店继电器模块,由此可以组成一个温控开关, 控制相关设备的工作温度,也可以接风扇用来散热等; • 5、本模块的温度检测范围为20-80摄氏度; • 6、本模块也可以换成带有线的温度传感器,用于水温,水箱等的控制。
零基础51单片机教程
HL-1学习板 热敏感应模块
主讲:星慈光
热敏感应模块
模块特色: 1、采用NTC热敏电阻传感器,灵敏度好 2、比较器输出,信号干净,波形好,驱动能力强,超过15mA。 3、配电位器调节温度检测阀值 4、工作电压3.3V-5V 5、输出形式 :数字开关量输出(0和1) 6、设有固定螺栓孔,方便安装 7、小板PCB尺寸:3.1cm x 2.4cm 8、使用宽电压LM393比较器
基于51单片机的声控开关

XTAL2:来自反向振荡器的输出。
振荡器特性:XTAL1和XTAL2分别为反向放大器的输入和输出。该反向放大器可以配置为片内振荡器。石晶振荡和陶瓷振荡均可采用。如采用外部时钟源驱动器件,XTAL2应不接。有余输入至内部时钟信号要通过一个二分频触发器因此对外部时钟信号的脉宽无任何要求,但必须保证脉冲的高低电平要求的宽度。
PSEN:外部程序存储器的选通信号。在由外部程序存储器取指期间,每个机器周期两次/PSEN有效。但在访问外部数据存储器时,这两次有效的/PSEN信号将不出现。
EA/VPP:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器。注意加密方式1时,/EA将内部锁定为RESET;当/EA端保持高电平时,此间内部程序存储器。在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。
P0=DSY_CODE[d%100/10];P2&=0XFB; DelayMS(5); P2|=0x0F;
P0=DSY_CODE[d%10];P2&=0XF7; DelayMS(5); P2|=0x0F;
}
void main()
{
EA=1; TMOD=10; TH0=245; TL0=245; TR0=1; ET0=1;PASS=0;d=0; BEEP=0;
RST:复位输入。当振荡器复位器件时,要保持RST脚两个机器周期的高电平时当8051
通电,时钟电路开始工作,在RESET引脚上出现24个时钟周期以上的高电平,系统即初始复位。初始化后,程序计数器PC指向0000H,P0-P3输出全部为高电平,堆栈指钟写入07H,
其它专用寄存器被清“0”。RESET由高电平下降为低电平后,系统即从0000H地址开始执行程序。然而,初始复位不改变RAM(包括工作寄存器声控延时开关
汽车内生命监控系统设计
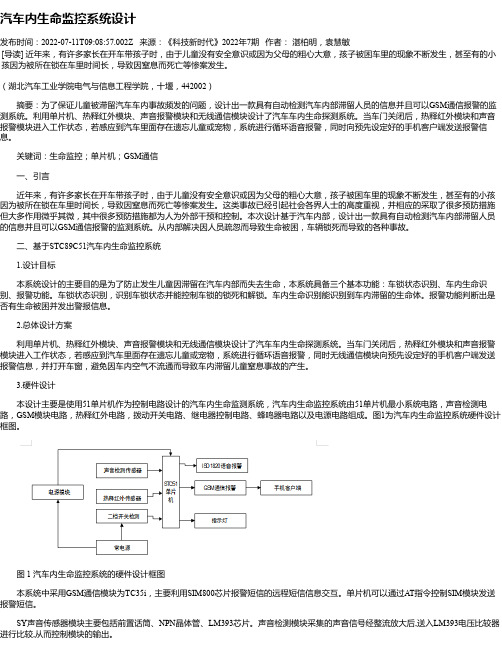
汽车内生命监控系统设计发布时间:2022-07-11T09:08:57.002Z 来源:《科技新时代》2022年7期作者:湛柏明,袁慧敏[导读] 近年来,有许多家长在开车带孩子时,由于儿童没有安全意识或因为父母的粗心大意,孩子被困车里的现象不断发生,甚至有的小孩因为被所在锁在车里时间长,导致因窒息而死亡等惨案发生。
(湖北汽车工业学院电气与信息工程学院,十堰,442002)摘要:为了保证儿童被滞留汽车车内事故频发的问题,设计出一款具有自动检测汽车内部滞留人员的信息并且可以GSM通信报警的监测系统。
利用单片机、热释红外模块、声音报警模块和无线通信模块设计了汽车车内生命探测系统。
当车门关闭后,热释红外模块和声音报警模块进入工作状态,若感应到汽车里面存在遗忘儿童或宠物,系统进行循环语音报警,同时向预先设定好的手机客户端发送报警信息。
关键词:生命监控;单片机;GSM通信一、引言近年来,有许多家长在开车带孩子时,由于儿童没有安全意识或因为父母的粗心大意,孩子被困车里的现象不断发生,甚至有的小孩因为被所在锁在车里时间长,导致因窒息而死亡等惨案发生。
这类事故已经引起社会各界人士的高度重视,并相应的采取了很多预防措施但大多作用微乎其微,其中很多预防措施都为人为外部干预和控制。
本次设计基于汽车内部,设计出一款具有自动检测汽车内部滞留人员的信息并且可以GSM通信报警的监测系统。
从内部解决因人员疏忽而导致生命被困,车辆锁死而导致的各种事故。
二、基于STC89C51汽车内生命监控系统1.设计目标本系统设计的主要目的是为了防止发生儿童因滞留在汽车内部而失去生命,本系统具备三个基本功能:车锁状态识别、车内生命识别、报警功能。
车锁状态识别,识别车锁状态并能控制车锁的锁死和解锁。
车内生命识别能识别到车内滞留的生命体。
报警功能判断出是否有生命被困并发出警报信息。
2.总体设计方案利用单片机、热释红外模块、声音报警模块和无线通信模块设计了汽车车内生命探测系统。
实验四 声音传感器实验
信息工程学院实验报告实验项目名称:实验四声音传感器实验实验时间:班级:姓名:学号:一、实验目的1. 学习CC2530 单片机GPIO 的使用。
2. 学习声音传感器的使用二、实验原理1. CC2530 节点与三轴加速度传感器的硬件接口(1). 声音传感器模块(MIC)引脚GND:外接GNDDO:数字量输出接口(0 和1)+5V:外接5V 电源(2). 传感器模块与2. GPIO(1). 简介CC2530单片机具有21个数字输入/输出引脚,可以配置为通用数字I/O或外设I/O信号,配置为连接到ADC、定时器或USART外设。
这些I/O口的用途可以通过一系列寄存器配置,由用户软件加以实现。
I/O端口具备如下特性:●21个数字I/O引脚●可以配置为通用I/O或外部设备I/O●输入口具备上拉或下拉能力●具有外部中断能力。
这21个I/O引脚都可以用作于外部中断源输入口。
因此如果需要外部设备可以产生中断。
外部中断功能也可以从睡眠模式唤醒设备。
(2). 寄存器简介本次实验中主要涉及到GPIO的寄存器如下:3. MIC 声音传感器(1). 概述声音传感器的作用相当于一个话筒(麦克风)。
它用来接收声波,显示声音的振动图象。
但不能对噪声的强度进行测量。
该传感器内置一个对声音敏感的电容式驻极体话筒。
声波使话筒内的驻极体薄膜振动,导致电容的变化,而产生与之对应变化的微小电压。
这一电压随后被转化成0-5V 的电压,经过比较器转换数字信号后,被数据采集器接受,并传送给计算机。
传感器特点:●具有信号输出指示。
●输出有效信号为低电平。
●当有声音时输出低电平,信号灯亮。
应用范围:●可以用于声控灯,配合光敏传感器做声光报警,以及声音控制,声音检测的场合。
(2). 使用方法本实验利用CC2530 的GPIO 读取声音传感器模块的检测结果输出端,当检测到一定的声音时,此输出端为低电平;未检测到一定的声音时,此输出端为高电平。
因此在实际应用中可以根据这种情况判断是否有声音在传感器附近产生。
C51语音单片机通用开发板电路图和相关程序-11页文档资料

89C51-ISD4000语音单片机通用开发板本板采用国内最常用的MCS-51语言单片机89C51,与最新的ISD4000系列语音芯片结合,可供用户开发各种最新的智能型数码语音产品。
一、结构板上已装配好:89C51--单片机,8031内核,4K可反复擦写的程序存储器,32条I/O口,5V工作ISD4003-08--语音芯片,音质优异的模拟存储技术,可反复录放,8分钟,可分1200段,SPI接口方式,3V供电LM386--功率放大器,0.5W驱动24C01(选配件)--I2C总线串行存储器。
还有驻极体话筒(MIC)、话筒放大器、音量电位器、发光管等部件。
二、性能参数外接电源电压:5V(稳压)外接喇叭:4-16欧姆,0 .5W工作电流:25~30mA ( 录音),50~80mA (放音)静态电流:13mA随板提供的演示程序功能:1、录音跳线插在"REC"一侧是录音状态,按住"AN"键不放,指示灯亮即可对着板上话筒讲话录音,松键时录音停止并形成一段。
再按则录下一段。
按"STOP"键为复位,再录音时又从第一段开始。
2、放音跳线插在"PLAY"一侧是放音状态,按一下"AN"键即播放一段,一段结束后自动停止放音,再按"AN"则播放下一段按"STOP"键为复位,再放音时又从第一段开始。
89C51-ISD4000语音电路程序AT89C51单片机89C51单片机12MHz注:本程序为ISD4002、4003的控制程序,ISD4004的程序须加些改动,请注意程序后边的注释。
SS EQU P1.0 ;片选SCLK EQU P1.1 ;ISD4003时钟MOSI EQU P1.2 ;数据输入MISO EQU P1.3 ;数据输出LED EQU P1.7 ;指示灯INT EQU INT0 ;中断AN EQU P1.6 ;执行STOP EQU P1.5 ;复位PR EQU P1.4 ;PR=1录音 PR=0放音;初始化ORG 0000H ;AJMP MAIN ;MAIN: MOV SP,#10H ;MOV P1,#0FFH ;MOV P2,#0FFH ;MOV P3,#0FFH ;MOV P0,#0FFH ;CLR EA ;MAII: SETB LED ;关指示灯ACALL DSTOP ;ISD掉电MAS0: MOV 3AH,#200 ;MAS1: JB AN,MAS0 ;等按AN键DJNZ 3AH,MAS1 ;ACALL UP ;ISD上电MOV 20H,#00H ;ISD低位地址MOV 21H,#00H ;ISD高位地址JB PR,REC ;PR=1 录音AJMP PLAY ;PR=0 放音;SETREC 16位;从指定地址录音 10100 <X A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 >REC: MOV A,20H ;发地址 A7-A0ACALL ISDX ;MOV A,21H ;发地址 A9-A8SETB ACC.7 ;CLR ACC.6 ;SETB ACC.5 ;CLR ACC.4 ;CLR ACC.3 ;ACALL ISDX ;SETB SS ;关片选;从当前地址录音 10110 <X A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 > REC1: MOV 36H,#10 ;REC2: ACALL YS50 ;延时录音DJNZ 36H,REC2 ;CLR LED ;开指示灯MOV A,#0B0H ;发 1011 0XXXACALL ISDX ;SETB SS ;关片选REC3: MOV 35H,#200 ;REC4: JNB INT,REC7 ;OVF=0芯片溢出JNB AN,REC3 ;DJNZ 35H,REC4 ;SETB LED ;关指示灯ACALL STOPP ;停止当前操作REC5: JNB STOP,REC6 ;中断RESETJB AN,REC5 ;等待AN=0ACALL STOPP ;停止当前操作AJMP REC1 ;REC6: CLR SCLK ;时钟SCLK=0SETB SS ;关片选ACALL STOPP ;停止当前操作AJMP MAII ;REC7: SETB LED ;关指示灯MOV 36H,#15 ;REC8: ACALL YS50 ;延时录音JB AN,REC6 ;等待AN=1DJNZ 36H,REC8 ;CLR LED ;MOV 36H,#15 ;REC9: ACALL YS50 ;延时录音JB AN,REC6 ;等待AN=1DJNZ 36H,REC9 ;AJMP REC7 ;;SETPLAY 16位;从指定地址放音 11100 <X A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 > PLAY: JNB AN,PLAY ;等待AN=1MOV A,20H ;发地址 A7-A0ACALL ISDX ;MOV A,21H ;发地址 A9-A8SETB ACC.7 ;SETB ACC.6 ;SETB ACC.5 ;CLR ACC.4 ;ACALL ISDX ;SETB SS ;关片选;PLAY 8位;从当前地址放音 11110 <X A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 > PLAY1: CLR LED ;LED开指示灯MOV A,#0F0H ;发 11110 XXXXXXXXACALL ISDX ;发 << SETPLAY >>SETB SS ;关片选PLAY2: JNB STOP,REC6 ;STOP=0停止放音JB INT,PLAY2 ;无OVF EOM继续放音SETB LED ;关指示灯ACALL STOPP ;停止当前操作;检测OVFCLR SS ;开片选CLR SCLK ;时钟SCLK=0SETB SCLK ;时钟SCLK=1JB MISO,REC6 ;芯片到未CLR SCLK ;时钟SCLK=0SETB SS ;关片选ACALL STOPP ;停止当前操作PLAY3: JNB STOP,REC6 ;中断放音JB AN,PLAY3 ;等待AN=0AJMP PLAY1 ;顺序放音;ISD上电 << POWERUP >>UP: MOV A,#20H ;发00100 XXXXXXXXXXXACALL ISDX ;SETB SS ;关片选ACALL YS50 ;50mS延时ACALL YS50 ;50mS延时RET ;;停止当前操作<< STOP >> 8位STOPP: MOV A,#30H ;发 0X11 0XXXACALL ISDX ;SETB SS ;关片选ACALL YS50 ;50mS延时ACALL YS50 ;50mS延时RET ;;停止当前操作掉电<< STOPPWRDN >> 8位DSTOP: MOV A,#10H ;发0X010 XXXXXXXXXXACALL ISDX ;SETB SS ;关片选ACALL YS50 ;50mS延时ACALL YS50 ;50mS延时;ISD3300,4003 SPI写入程序 8位数据在A ISDX: CLR SS ;开片选MOV R6,#8 ;CLR SCLK ;时钟SCLK=0ISD1: MOV C,ACC.0 ;MOV MOSI,C ;数据写 MOSISETB SCLK ;时钟SCLK=1RR A ;CLR SCLK ;时钟SCLK=0DJNZ R6,ISD1 ;RET ;;**** 10mS延时 ****YS1: MOV TMOD,#01H ;MOV TH0,#0D8H ;10mS延时初值置入MOV TL0,#0F0H ;(65536-X)*1=10MSSETB TR0 ;65536-(10000/1)=D8F0HJNB TF0,$ ;CLR TF0 ;CLR TR0 ;RET ;;**** 50mS延时 ****YS50: MOV TMOD,#01H ;MOV TH0,#3CH ;50mS延时初值置入MOV TL0,#0B0H ;(65536-X)*1=50MSSETB TR0 ;65536-(50000/1)JNB TF0,$ ;CLR TF0 ;CLR TR0 ;RET ;END ;附:ISD4004的程序改动注明:SETREC:;指定地址录音MOV 20H,#00H ;低八为地址MOV 21H,#00H ;高八位地址MOV 22H,#0a0H ;操作码MOV A,20HACALL ISDXMOV A,21HACALL ISDXMOV A,22HACALL ISDX指定地址录音(SETPLAY)和指定地址快进(SETMC)的改动与上述相同ISD4000-89c51开发板C程序示例// ISD4002-89c51开发板演示例程 C51版本 *// 作者:中青世纪 Lell *// 2019.2.27 *// 更多ISD4000使用心得请登陆中青世纪论坛 *// http://atvoc/bbs *#include <reg51.h>sbit SS = P1^0; //片选sbit SCLK = P1^1; //ISD4003时钟sbit MOSI = P1^2; //数据输入sbit MISO = P1^3; //数据输出sbit LED = P1^7; //指示灯sbit ISD_INT= P3^2; //中断sbit AN = P1^6; //执行sbit STOP = P1^5; //复位sbit PR = P1^4; //PR=1录音? PR=0放音void delay(unsigned int time) //延迟n微秒{while(time!=0){time-- ;}}void delayms(unsigned int time) //延迟n毫秒{ TMOD=0x01;for(time;time>0;time--){TH0=0xfc;TL0=0x18;TR0=1;while(TF0!=1){;}TF0=0;TR0=0;}//************************************//ISD4002 spi串行发送子程序,8位数据//************************************void spi_send(unsigned char isdx){ unsigned char isx_counter;SS=0; //ss=0,打开spi通信端SCLK=0;for(isx_counter=0;isx_counter<8;isx_counter++) //先发低位再发高位,依次发送。
单片机声控定位系统doc
哈尔滨华德学院毕业论文摘要利用MCS-51作为硬件平台,在同一个平面内,使用NE555发出固定频率的声波,并且使用三个固定频率信号接收器来接收声音,在发第一次声音的时候开始计时,在第一个探头收到时截止。
由于声音是由物体振动产生,正在发声的物体叫声源。
声音以波的形式传播。
声音是声波通过任何物质传播形成的运动,并且声音在空气(15℃)中的速度是340m/s,所以可以用声音来计算出发声器与接收探头之间的距离,按上述方法做三次,经过计算,最后确定出发生器位置。
本次设计是基于MCS-51单片机的声控定位系统的设计,硬件部分主要是MCS-51单片机。
该系统采用了MCS-51作为控制电路核心。
单片机能够对采集的数字信号进行处理和判断,实现用声音定位出发声器的位置。
该设计的主要任务是根据外部控制和输入固定频率的声音信号量,这样可以实现对于一个物体的位置的确定。
关键词MCS-51平台;结构化程序语言;声音;数字信号采集- I -哈尔滨华德学院毕业论文The Voice positioning system based on ArduinoAbstractMCS-51hardware platform using , in the same plane , using a fixed -frequency sound waves issued NE555 and using three fixed frequency signal receiver for receiving sound, the sound issued when the first start time, closing the first probe when closed. Since the sound is produced by vibrating objects , objects being vocal sounds sources. Sound propagation in the form of waves. Sound is the movement to form sound waves propagate through any substance , and the speed of sound in air (15 ℃) in the 340m / s, so it can be used to calculate the distance voice sound way between the probe and the receiver , three times by the above method , after calculation, the finalization of the generator location.This design is based on the MCS-51 microcontroller voice positioning system design , hardware mainly by the MCS-51 microcontroller . The system uses the MCS-51as a control circuit core . Microcontroller for digital signal processing and collection of judgments, implementer sound with sound localization starting position . The main task of the design is based on an external control input and the amount of fixed-frequency sound signal , this can be achieved for the determination of the position of an object .Keywords MCS-51 platform;Structured Programming Language;Sound;Digital signal acquisition- II -哈尔滨华德学院毕业论文目录摘要...... .. (I)Abstract (II)第1章绪论 (1)1.1 选题目的和意义 (1)1.2 国内外现状 (1)1.3 论文研究内容 (2)第2章开发环境及主要元器件 (3)2.1 开发工具 (3)2.1.1 MCS-51简介 (3)2.2 使用的主要元器件 (7)2.2.1 固定频率声音识别模块 (7)2.2.2 LM567 (10)2.2.3 固定频率发声器 (12)2.2.4 NE555 (13)2.2.5 LCD液晶显示器 (15)2.3 本章小结 (17)第3章设计与实现 (18)3.1 定位机理 (18)3.1.1 强度差 (18)3.1.2 时间差 (18)3.1.3 音色差 (18)3.1.4 位相差 (18)3.2 系统基本流程图 (19)3.3 程序设计思想: (20)3.3.1 电平触发方式 (20)3.3.2 整体平台设计 (21)3.3.3 定位算法(一): (21)3.3.4 定位算法(二): (22)3.3.5 显示设计 (23)- III -哈尔滨华德学院毕业论文3.4 本章小结 (25)第4章系统测试优化 (26)4.1 测试基本内容 (27)4.1.1 测试方法与仪器 (27)4.1.2 测试数据完整性 (27)4.1.3 测试结果分析 (27)4.2 系统优化 (28)4.2.1 程序优化 (28)4.2.2 实体优化 (28)4.3 本章小结 (30)结论 (31)致谢 (32)参考文献 (33)附录 (34)英文原文 (34)The Phase to Develop the System (34)英文译文 (41)系统开发阶段 (41)- IV -哈尔滨华德学院毕业论文第1章绪论1.1选题目的和意义人们经常借助听觉来判定发音物体的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号比较电路
•
信号比较部分采用LM393集成芯片实现功能,3管脚接声音采集电路,
输入采集到的声音信号;管脚2接LED显示电路所给定的一个可调电压。其中,
声音信号与给定的电压比较,若大于该电压,则由1脚输出信号0;若低于给
定的电压,则由1管脚输出信号1
灯1
灯2
S 1
LED显示电路
• 该部分电路的原理图看到,该电路由VCC给一个高电平,滑 动变阻器用以调节供给比较器的电压阀值。当接电时,灯1亮; 当比较器输出值为1时,由于电路两边都是高电平,所以灯2不亮, 反之,灯2亮,这样就能反应出有无声音信号了。
K12-L298P电机驱动板
R3-L293D电机驱动模块
慧净microbit扩展板 micro:bit转接板
慧净micro:bit智能小车驱动板
microbit机器人2WD驱动板
驱动板正面
慧净树莓派扩展板 SMP-ad8951
树莓派SMP-ad8951
慧净树莓派智能小车驱动板SMP-298Pcar
第一种线材---杜邦线---颜色有多种--注:后继各种 模块 全部按照本方法接线
模块:V--- 接开发板VCC针脚 模块:G---接开发板GND针脚
模块统一防插反接口
模块:S ---接开发板(IO针脚) 模块:V--- 接开发板VCC针脚 模块:G---接开发板GND针脚
第二种线材---3P防插反线----(自备)注:后继各 种模块全部按照本方法接线
模拟麦克风声音传感器 声控模块 HJduino电子积木--选配
选配
分贝检测 模拟声音传感器 HJduino电子 积木 咪头模块 声控开关
选配
声音传感器模块 麦克风传感器模块 声音 检测模块 模拟 音频输出
选配
声音传感器模块 声控开关 声音检测 麦 克风传感器模块 模拟+数字
选配
数字 声音检测模块 声音感应传感器 声控模块 HJduino电子积木
模块:S ---接扩展板S--开发板IO口引脚 模块:V--- 接扩展板V--开发板VCC针脚 模块:G--- 接扩展板G--开发板GND针脚
模块接口 3P线接头
3P线接头
Hale Waihona Puke 扩展板接口51单片机最小系统
AVR单片机最小系统
STM32单片机最小系统
慧净ARduino主板--扩展板
Arduino UNO智能小车开发驱动扩展板
●RI,接收中断标志位。在方式0时,当串行接收第8位数 据结束时,或在其它方式,串行接收停止位的中间时,由 内部硬件使RI置1,向CPU发中断申请。也必须在中断服 务程序中,用软件将其清0,取消此中断申请。
串口助手--显示接收传感器数据
实验效果
谢谢
话筒(麦克风)组成
• 接二极管的目的是在场效应管受强信号冲击时起保护作用。 场效应管的栅极接金属极板。这样,驻极体话筒的输出线便有两 根。即源极S,一般用蓝色塑线,漏极D,一般用红色塑料线和连 接金属外壳的编织屏蔽线。
话筒(麦克风)应用
• 广泛应用于交通干道噪声监测、工业企业厂界噪声检测、建 筑施工场界噪声检测、城市区域环境噪声检测、社会生活环境噪 声检测监测和评估。
树莓派SMP-298Pcar
HJ-FAN 风扇模块 灭火机器人消防智能小 车航模桨叶5V灭火风扇模块
实验参考电路
模块:S ---接开发板IO口针脚
HL-1接线说明 模块:V--- 接开发板VCC针脚 模块:G---接开发板GND针脚
实验源码
如何通过串口收发数据
串口1接收到的数, 从SBUF中读取;如要从串口 1 发送,将数据送入SBUF 即可。
话筒(麦克风)组成
• 该传感器是内置一个对声音敏感的电容式驻极体话筒。驻极 体话筒主要由两部分组成——声电转换部分和阻抗部分。声电转 换的关键元件是驻极体振动膜。它是一片极薄的塑料膜片,在其 中一面蒸发上一层纯金薄膜。然后再经过高压电场驻极后,两面 分别驻有异性电荷。膜片的蒸金面向外,与金属外壳相连通。膜 片的另一面与金属极板之间用薄的绝缘衬圈隔离开。这样,蒸金 膜与金属极板之间就形成一个电容。
话筒(麦克风)组成
• 当驻极体膜片遇到声波振动时,引起电容两端的电场发生变 化,从而产生了随声波变化而变化的交变电压。驻极体膜片与金 属极板之间的电容量比较小。因而它的输出阻抗值很高,约几十 兆欧以上。这样高的阻抗是不能直接与音频放大器相匹配的。所 以在话筒内接入一只结型场效应晶体三极管来进行阻抗变换。场 效应管的特点是输入阻抗极高、噪声系数低。普通场效应管有源 极(S)、栅极(G)和漏极(D)三个极。这里使用的是在内部源极和 栅极间再复合一只二极管的专用场效应管。
话筒(麦克风)简介
• 话筒又可称之为声敏传感器,它是一种在气体液体或固体中 传播的机械振动转换成电信号的器件或装置。它采用接触或非接 触的方式检测信号。声敏传感器的种类很多,按测量原理可分为 压电、电致伸缩效应、电磁感应、静电效应和磁致伸缩等等。本 课采用电容式声敏传感器中的一种也就是电容式驻极体话筒做个 简单的介绍。
声音传感器模块功能说明
• 声音传感器是机器人专门用来搜寻声音来源的传感器,当然 声音传感器也可以用来检测声音的大小,本传感器对声音特别灵 敏。声音传感器利用麦克风对声音非常敏感的特点,使用特制的 麦克风来检测声音,然后把麦克风的大小转化为高低变化的电平 信号,输入到单片机处理器中,单片机处理器根据信号的变化做 出相应的程序处理。
声音传感器
• 声音传感器的作用相当于一个话筒(麦克风)。它用来接收 声波,显示声音的振动图像,但不能对噪声的强度进行测量。
• 该传感器内置一个对声音敏感的电容式驻极体话筒。声波使 话筒内的驻极体薄膜振动,导致电容的变化,而产生与之对应变 化的微小电压。这一电压随后被转化成0-5V的电压,(模拟型) 经过A/D转换被数据采集器接受,并传送给计算机,(数定型) 经过比较器转换成数字0 1输出,并传送给计算机。
零基础51单片机教程
HL-1学习板 声音传感器模块
主讲:星慈光
声音传感器模块
模块参数: 模块尺寸: 供电电压:3.3-5V 信号输出方式:数字信号输出(感应到声音后输出低电平) 接口形式:2.54间距排针(防接反插座) 固定方式:兼容Le高等积木(直接对插),预留两个M3螺丝孔,方便 固定。 灵敏度可调(图中蓝色数字电位器调节)
硬件组成
• 该声音传感器由声音采集电路、信号比较电路和LED显示电 路组成,主要芯片有51单片机和LM939电压比较器,工作电压为 3.3V-5V。
参考原理图
声音采集电路
• 这部分由一个声音采集器,一个由RC振荡器构成的滤波器和 一个放大器组成。其中,声音采集器可以检测声音,滤波器可以 减少外部干扰,放大器放大信号电压,以便进行处理。