多个体系统的二分蜂拥一致性
带测量噪声的多个体系统领导者跟随一致性问题

O高校讲坛 0
S IN E E H O O YIF R TO CE C &T C N L G O MA I N N
21 年 02
第 1 期 1
带测量噪声的多个体系统领导者 跟随一致性问题
王 期 B ( 安徽理 工大 学理学 院 安徽
淮南
220 ) 3 0 1
【 摘 要】 由于随机通信环境对 多个体 系统网络 的影响 , 个体之 间信息的获取 和传送过程 中, 噪音是不可避免地存在的 。因此 , 带测量噪 声 和有 网络拓扑的跟踪一致 问题 需要进一步的探究。本文提 出了一种协议能减弱测量噪声的效应 的一致协议 , 得到多个体 系统在 均方意义下达 到一致 的一个充分条件。 【 关键词】 多个体 系统; 测量噪声 ; 一致协议
l i x() 。t)= ,mE ”() 。 £)1 mE( £ () O l ( t () 0 i () 4
此 时闭环 系统是随机稳定的 领 导者可用二阶积分器来描述 : () o tv () ()a () ( ) t=t )。t,。 t= ot 5 (
,∞ r∞ ,
=
制协议考虑了个体的位置状况及个体 的速度信息 , 令 ( ( u ) t ) 图g 描述 由一个领 导者和 n 个跟 随者构 成多个体系统 的内部连接 拓 ( 为跟 随者 i f £ ) 在 时刻 的邻域及领导者 , ( 为跟随者邻集 , ( 为 f ) t ) 扑 , B d g a , % } R 是领导者的邻 接矩 阵。令 H L B 下面 则 = i { 。 …, 。 ∈ a =+ , 跟随者 i 的领导者邻集 。 介绍一个引理 : 令 =o( 0 …, ) R ‘ ,= , , ) , (I …, ) , cf , ∈ ” (l… ‘ = , = ∞ 叶 引理 : 下面的各情况是等价 的: clo …, )则 闭环系统可用矩阵形式表述: ot ( , 10 ) 点是图 g 的全局可达点 : ) 2 H是正定矩阵 ,它 的特征值具有 正实部 ; ) 3若 是平衡的 , H H 是对称正定矩阵。 则 +r 本 文通 过分布式控制协议来 考虑多个体 系统 的领 导者跟随一 致 性 问题 。 这个系统有一个 领导者 和 n个跟踪者 。 I=o-kl xy o x- k Z ∞ 0 a1yat + kB loya 一I v  ̄ r 工 则领导者 的一阶动力 学模型为 : 其 中 = , 是分段常数的切换信号 , d ge … , 。 £+ ∑ =i ( a e )
多智能体系统的有限时间与固定时间一致性

N
2) ∑ w qi ≥ N 1 -q( ∑ w i ) q .
为与第 i 个顶点相连的顶点的数目,即 d i = ∑ a ij ,度
i=1
j∈N i
矩 阵 定 义 为 D = diag{ d 1 ,d 2 ,…,d n } . 图 G 的
Laplacian 矩阵定义为 L = D - A.在无向图 G 中,L 是
G = (V,E,A) 表示各个智能体之间进行信息交换的
网络拓扑,顶点集 V = { v1 ,v2 ,…,vn } 为有限的非空集
合,其中 vi 代表第 i 个智能体,顶点的下标集为 I =
{ 1,2,…,n} ,边集 E = V × V.如果顶点 vi 和顶点 vj 有信
息传递,则它们之间有一条边,表示为 eij = (vi ,vj ) ∈
1 江苏师范大学 计算机科学与技术学院,徐
州,221116
统固定时间一致性跟踪问题.Zhang 等 [14] 研究了具有饱和输入的二阶
有领导者的多智能体系统固定时间一致性问题. Zhao 等 [15] 提出一种
终端滑模协议,解决了具有未知外部干扰的二阶多智能体系统的固
定时间一致跟踪问题.
目前,能够同时考虑有限时间一致性和固定时间一致性的文献
另一方面,在实际生活中,人们总是希望多智能体系统能在有
限时间内达到一致. Li 等 [ 11] 研究了具有约束的不 确 定 非 线 性 多 智
能体系统的有限时间跟踪问题. Zhang 等 [ 12] 研究了事件驱动的多智
能体系统的有限时间一致性. Wang 等 [ 13] 则提出一种包含线性项和
非线性项的新协议,使得切换拓扑下的多智能体系统在有限时间达
相对较少.为了能在统一的框架下解决有限时间一致性和固定时间一
多个体系统的一致性方法——两点跳算法

其中三 LZ。 :+
假设 图是静态 的, ( ) 则 1 式可以看作 :
一
∑W ∑ 薯 +
|E N J E N ; ’
。
( 5 )
() 2 式可 以看作 :
一
| ‘ N .
∑ + I W ∑ 】 Wf∑ + 1 ∑
\ keN { JE ^ \ kEN I |
(。 不存在 , w 0 , ) 则 = 。则可 以将多个体系统的动态过程描述为 :
= 一
至
∑
≥ ) A (
( )
L
() 2
其中 [ 一, ] L D W 为有 向图的拉普拉斯矩 阵。如果对 = =— , 任意 的 i j 都有 = 则我们称 多个体 系统 在上等式 ( ) #, , 2 下达 到一
假设在 多个体 网络系统 中,i x是个体 ii12 … , 的状 态。 图 2 两点跳算法的收敛 速度 ( ,, Ⅳ) = G ( ,) = Ⅳ E 代表 网络个体之间 的信息交互拓扑 图,, J代表个体 的数 目, ] 、 E 代表有 向图中边的集合 。 如果边 ( ) E 则称节点 是节点 的邻 , , 居 。 表示节 点 的邻居集合 。 则对每一个个体 , 其动力学模型 X i 被描
0 引言
随着分布式网络及 多个体系统的迅速发展 . 多个体系统 中的一致 性 问题引起越来越多研究者 的关注 因为掌握其 中的原理不仅有助 于 理解多种 自 界中的现象 . 然 如鱼 群绕 着某一 中心转 圈 . 成群的鹿 的迁 徙等现象 : 而且它还应用在很 多重要 的多领域 . 机器人之间 的协 同 如 合作 。Of i a e 和 M r y . 出了一致性 问题 的理论框架及一般 l t S br a— u at 提 r u 的一致性算法。 在多个体系统中 .一致 ” “ 代表着个体在一定程度上就某种状态量 趋 于一致 . 而该一致值取决 于所有个体 的状态 而一致性算法则是体 现个体之 间信息传输时所遵循 的法规 此外 . 一些文献对多个体 系统 的一致性 问题进行了更深层 次的研究 H 等人分析 了具有多个领导 u 者 的控制系统的一致性 问题 . 分别对 固定 网络拓扑和切换 网络拓扑这 两种情形下 . 给出另外的多个体系统能够收敛到上述多个领导者为顶 点 的立方体 内 Re n研究了具有动态领导者 的有界控制输入 的一致性 跟踪协议 . 且系统为切换信息 交换 网络拓扑结构 . 并 最终给 出一致性 跟踪协议 的收敛条件 本文 中. 我们讨 论一个具有很好 的收敛速度 的一致性算法——两 点跳算法
二阶多个体系统控制受限下的无碰撞速度一致性问题
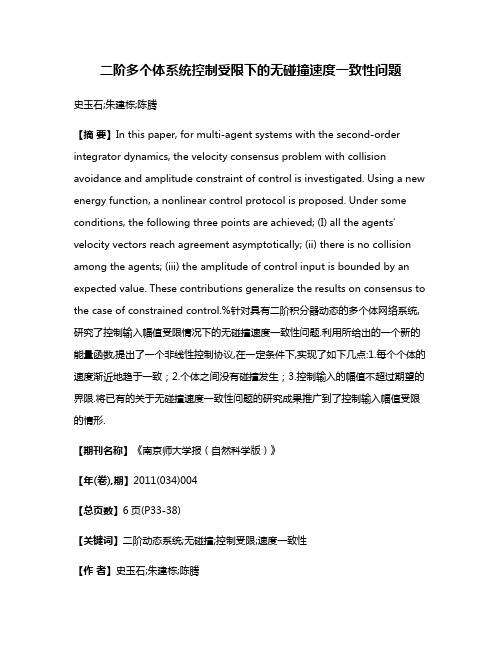
二阶多个体系统控制受限下的无碰撞速度一致性问题史玉石;朱建栋;陈腾【摘要】In this paper, for multi-agent systems with the second-order integrator dynamics, the velocity consensus problem with collision avoidance and amplitude constraint of control is investigated. Using a new energy function, a nonlinear control protocol is proposed. Under some conditions, the following three points are achieved; (I) all the agents' velocity vectors reach agreement asymptotically; (ii) there is no collision among the agents; (iii) the amplitude of control input is bounded by an expected value. These contributions generalize the results on consensus to the case of constrained control.%针对具有二阶积分器动态的多个体网络系统,研究了控制输入幅值受限情况下的无碰撞速度一致性问题.利用所给出的一个新的能量函数,提出了一个非线性控制协议,在一定条件下,实现了如下几点:1.每个个体的速度渐近地趋于一致;2.个体之间没有碰撞发生;3.控制输入的幅值不超过期望的界限.将已有的关于无碰撞速度一致性问题的研究成果推广到了控制输入幅值受限的情形.【期刊名称】《南京师大学报(自然科学版)》【年(卷),期】2011(034)004【总页数】6页(P33-38)【关键词】二阶动态系统;无碰撞;控制受限;速度一致性【作者】史玉石;朱建栋;陈腾【作者单位】南京理工大学紫金学院,江苏南京210046;南京师范大学数学科学学院,江苏南京210046;南京师范大学数学科学学院,江苏南京210046【正文语种】中文【中图分类】O231.1近些年来,关于多个体系统运动的一致性问题引起了相关研究人员的极大关注.比如多个运动的智能机器人[1]、无人驾驶的飞机[2],每个个体自身都有相同的或相似的动态方程,且不同个体之间可能有信息传递发生.它们各自要完成的任务,就是借助从其他个体那里得到信息,通过控制协议使自身的状态渐近地与其他个体的状态趋于一致.人们所要做的就是利用个体自身的动态方程和个体间信息传递的网络拓扑结构,设计控制输入协议,最终实现群体的一致性.因其广泛的实际应用背景,引起了控制理论界的广泛兴趣,并取得了丰硕的研究成果.关于具有一阶动态的多个体系统的一致性问题,比较早的文献可见[3-5],文献[3]基于有向图对一致性问题建立了一个理论框架,并考虑了切换拓扑及信息传输时滞问题.针对固定拓扑情形,提出了一个线性控制协议,给出闭环系统实现一致性的一个充分条件,即有向图的强连通性.文献[4]则进一步给出了一致性的充要条件,即在有向图中存在有向生成树.文献[5]也给出了等价的结果.根据牛顿第二定律建立的数学模型往往是二阶动态方程,因此对二阶动态多个体系统的研究更具有实际意义.文献[6,7]较早地关注了这类问题,其中文献[6]提出了一种线性一致性协议,文献[7]提出了带有调节参数的控制协议,指出了闭环系统的一致性不仅与信息传输网络的拓扑结构有关,并且与参数的选择有关,得到实现一致性的一个充分条件.文献[8]则把一致性算法应用到了小车的编队控制中.[9]给出了更一般形式的控制协议,得到了一致性的充要条件,通过选择不同的参数,可得到不同形式的一致性状态.文献[10]在[9]的基础上又提出了加权平均一致性协议,并推广了[9]中的相关结果.此外,针对不同的二阶多个体系统模型,出现了许多优秀的研究成果,比如文献[11]考虑了随机切换拓扑情形,给出了新的一致性条件.在文献[12]中,假定位置信息和速度信息的传递网络拓扑可以是不同的,并给出有界的控制协议,使个体最终位置向量和速度分量各自趋于一致.近年来,群集运动的无碰撞一致性问题受到了研究人员的重视.具有相同动态方程的智能群体,通过所设计的控制协议使得智能群体的运动状态渐近地实现一致性,并且在运动的过程中个体之间没有碰撞发生.Tanner等在[13,14]中利用势场法和力学分析技巧,考虑了基于无向信息传输网络的智能群体群集运动控制问题,既涉及到固定拓扑情形,也包括切换拓扑情形.文献[15]基于结构能量函数和一致性协议提出了无向切换网络的群集运动控制算法,并讨论了避障和跟踪问题.文献[16]则利用一个新的能量函数,设计了一个新的群集运动无碰撞控制协议.需要提出的是,对无碰撞的一致性问题,一般考虑的是无向网络,所设计的控制协议也是非线性的.无碰撞的要求在编队控制中同样存在.在实际应用中,控制输入往往受到幅值或能量方面的限制.研究输入受限下的控制问题也更具有实际意义,这也是多年来控制理论领域的一个研究热点.文献[17]对二阶动态多个体系统提出了一个有界控制输入协议,并对输入上界进行了估计,但文中没有涉及无碰撞的要求.能否借鉴[17]中设计有界控制协议的思想在群集控制中设计输入受限的无碰撞一致性协议呢?本文正是围绕这一问题展开研究.关于这方面的研究成果还未见报道.本文对二阶多个体系统,给出了一种控制受限的控制输入协议.根据控制输入的界值,可以设定控制器中的参数,确定系统初值的范围,保证了控制受限下闭环系统实现速度一致性.文中个体系统的不同状态分量信息传递的网络拓扑结构可以是不同的.其中 ri,vi,ui∈Rm,i∈I,m ≥1.ri为个体i的位置向量,vi为个体i的速度向量,ui为控制输入项.个体间位置向量的信息传递网络为无向图G(A),速度向量的信息传递网络为无向图G(B),两者之间的拓扑结构不一定相同,即A≠B.因为G(A),G(B)都是无向网络拓扑,所以A=[aij],B=[bij]均是对角线上各元素为0,其余元素不全为0的对称矩阵.设计控制输入ui时,只能利用个体i的自身信息及在信息传递网络中所能直接接收的信息.定义1[16]本文所谓的控制受限的无碰撞速度一致性问题即为设计ui,使得整个闭环的网络系统满足(i)速度渐近实现一致,即|vi(t)-vj(t)|→0,t→∞,∀i,j∈I;(ii)个体之间无碰撞发生,即|ri(t)-rj(t)|≠0,∀t∈[0,+∞),∀i≠j;(iii)控制受限,即|ui(t)|≤M,t∈[0,+∞),其中M是控制项的幅值上界.为了设计控制协议,首先引入一个引理:引理函数(其中a,d都是常数)及其导数在x≥0时有如下性1考虑由n个个体构成的多个体系统,每个个体的动态方程为如下二阶积分器质: (I)φ(x)当x=0时有最大值时有最小值0,且 x>d时,φ(x)<1.1(II)φ(x)关于x的导数为当x> d1时,ψ(x)>0;当时,ψ(x)有最大值时,ψ(x)有最小值图1为函数及其导数当a=1,d=2,1 x∈[0,20]时的图像.证明 (I)因为,不难看出,当且仅当 x=d1时,φ(x)=0,此时φ(x)值最小.又因为0<a<d1,所以当 x>d1时,0<x-d1<x+a,则1.而在[0,d]区间内φ(x)为减函数,1因此当x=0时φ(x)有最大值(II)φ(x)的导数为再对其求导,易知ψ(x)在上为增函数,在上为减函数.因此当有最大值,为当x=0时,ψ(x)有最小值为(III)比较的大小,因为0<a<d1,则又因为所以本文中假设位置信息传递和速度信息传递的网络G(A)和G(B)的拓扑结构都是固定的,我们提出如下控制协议其中K1,K2>0,tanh(·)为双曲正切函数,-1≤tanh(·)≤1.向量的双曲正切函数等于每个对应分量的双曲正切函数组成的向量,即若x=(x1,x2,…,xn)T,则tanh(x)=(tanhx1,tanhx2,…,tanhxn)T.从控制协议的形式看,ui只用到了个体自身的信息及网络中所能接收的信息.下面给出本文的主要结果.定理考虑由n个个体组成的多个体系统,每个个体的动态方程由(1)式表示.设位置信息传递网络G(A)为一个完全图,速度信息传递的网络G(B)为一个连通图.假设每个个体的初始位置满足0<d1初始速度满足,令取K1=,则在控制协议(3)下,定义1所描绘的控制受限的无碰撞速度一致性问题可解.其中证明由于当 j∉Ni(A)时,aij=0,当 j∉Ni(B)时,bij=0,故由引理可知因为l所以再设计Lyapunov函数易知V≥0,对上函数求导,有根据Lasalle不变集原理,闭环系统的状态将收敛到若˙V=0,可得当bij≠0时,(vi-vj)Ttanh(vi-vj)=0,即vi=vj.又因G(B)为连通图,所以若˙V=0,有综之,对有,即速度向量渐近趋于一致.要证明个体之间没有碰撞发生,只需证对∀t≥0,i,j∈I,|ri(t)-rj(t)|不能为0.下面用反证法证明这一结果.假设在某时刻 t1,有某两个个体i1、i2有碰撞发生,即有 |ri1(t1)-ri2(t1)|=0,则有由引理可知将代入上式得又因为,则由引理可知将代入上式得则由(5)和(7)式可知这与V是非增的单调函数矛盾.因此对于任意时刻t和任两个结点i,j∈I,都不存在|ri(t)-rj(t)|=0的情形,所以个体之间是无碰撞的.定理得证.考虑4个个体的拓扑结构,每个个体有如(1)式的二阶动态系统,若位置信息传递网络拓扑结构和速度信息传递网络拓扑结构如图2所示,它们的赋权邻接矩阵分别为则有 n=4,am=0.9,aM=2.8,aA=11.2,bM=5.若令m=2,即位置分量、速度分量和控制输入均为二维的;再令,即,则有1,即有 d1=1,由定理得l=5 即.取 K2=5,则令初始速度为仿真时间为5,图3为ui的仿真结果.可以看出ui取值严格限制在(-50,50)之间,即满足条件|ui|<50.随着各个个体速度分量趋于一致后,ui的值趋向于0.图4和图5为个体各状态分量随时间变化的仿真结果.由图可以看出4个个体的速度最终趋于一致,且个体间保持一定的距离,无碰撞发生.本文研究具有二阶动态系统的多个体系统,设计有期望幅值界限的控制协议,使得最终所有个体渐近地取得相同的速度向量,且个体两两之间没有碰撞发生.有向网络拓扑结构下的多个体系统控制受限下的协议设计还有待进一步研究.【相关文献】[1] Fax J A,Murray R M.Information flow and cooperative control of vehicle formations[J].IEEE Trans Automat Control,2004,49(9):1 465-1 476.[2] Lian Z T,Deshmukh A.Performance prediction of an unmanned airborne vehicle multi-agent systems[J].European Journal of Operational Research,2006,172(2):680-695.[3] Saber R O,Murray R M.Consensus problems in networks of agents with switching topology and time delays[J].IEEE Trans Automat Control,2004,49(9):1 520-1 533.[4] Ren W,Beard R W.Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J].IEEE Trans Automat Control,2005,50(5):655-661.[5] Lin Z Y,Francis B,Maggiore M.Necessary and sufficient graphical conditions for formation control of unicycles[J].IEEE Trans Automat Control,2005,50(1):121-127.[6] Xie G M,Wang L.Consensus control for a class of networks of dynamic agents [J].International Journal of Robust and Nonlinear Control,2007,17(10/11):941-959.[7] Ren W,Atkins E.Distributed multi-vehicle coordinated control via local information exchange[J].International Journal of Robust and Nonlinear Control,2007,17(10/11):1 002-1 033.[8] Ren W.Consensus strategies for cooperative control of vehicle formations [J].IET Control Theory& Applications,2007,1(2):505-512.[9] Zhu J D,Tian Y P,Kuang J.On the general consensus protocol of multi-agent systems with double-integrator systems[J].Linear Algebra and its Applications,2009,431(5/7):701-715.[10] Shi Y S,Zhu J D,Chen T.On the general weighted-average protocol of multi-agent systems with double-integrator dynamics[C]//Proc of the 28th Chinese Control Conf.Guilin,2009:4 860-4 865.[11] Zhang Y.Consensus of multi-agent systems with stochastic switching topology [C]//Proc of the 27th Chinese Control Conf.Kunming,2008:545-549.[12] Ren W.On consensus algorithms for double-integrator dynamics[C]//Proc of the 46th IEEE Conf on Decision and Control.New Orleans,2007:2 295-2 300.[13] Tanner H G,Jadbabaie A,Pappas G J.Stable flocking of mobile agents,PartI:fixed topology[C]//Proc of the 42nd IEEE Conf on Decision and Control.Maui:IEEE Press,2003:2 010-2 015.[14] Tanner H G,Jadbabaie A,Pappas G J.Stable flocking of mobile agents,PartII:dynamic topology[C]//Proc of the 42nd IEEE Conf on Decision and Control.Maui:IEEE Press,2003:2 016-2 021.[15] Saber R O,Murray R M.Flocking with obstacle avoidance:cooperation with limited communication in mobile networks[C]//Proc of the 42nd IEEE Conf on Decision and Control.Maui:IEEE Press,2003:2 022-2 028.[16]俞辉,王永骥,程磊.基于有向网络的智能群体群集运动控制[J].控制理论与应用,2003,24(1):79-83.[17] Chen Y Y,Tian Y P.A backstepping design for directed formation control of three-coleader agents in the plane[J].International Journal of Robust and Nonlinear Control,2009,19(7):729-745.。
有时延的奇异多个体系统的可接受一致性

有时延的奇异多个体系统的可接受一致性【关键词】可接受一致性;奇异多个体系统;时延;动态输出反馈0 引言最近几年,许多研究人员关注多个体系统的一致性问题,归因于多个体系统在不同领域的潜在应用,如自己驱动粒子的集合运动,动物的蜂拥现象,无人航天器的多个机器人编队控制,卫星的族群队列,等等。
1 问题描述考虑一个有n个个体的多个体系统,如下:2 可接受一致性令u=[u1,u](u=[u2,u3,…,un])作为一个非奇异矩阵,那么u-1lu=jl,这里jl是l的若当规范形式。
令λ1,λ2,…,λn 表示l的特征值,这里λ1=0,和它相关的特征向量为定理1当且仅当下面的条件同时成立,多个体系统(3)达到可接受一致性,(i)(e,a+bk0c+bk)是可接受的;推论1如果网络拓扑g没有生成树,那么当且仅当多个体系统(3)是可接受的,它才可以达到可接受一致性。
3 结论有时延在动态输出反馈一致性协议下,高阶线性奇异多个体系统的可接受一致性问题得到解决。
通过一个近似于分离原则的非奇异转换,可接受一致性问题转换为多个奇异子系统的可接受问题,一致性协议的得到矩阵分发给不同的子系统。
进一步,可接受的一致性协议准则以线性矩阵不等式形式给出,由于它不依赖个体的数量,所以是可扩展性的。
更有,给出一个确定一致性函数的方法,此方法可以确定时延影响、最迟条件和在一致性函数上的网络拓扑。
【参考文献】[1]t.visek,a.czirok,e.ben-jacok,i.cohen,o.shochet,novel type of phase transition in a system of self-driven particles,phys.rev.lett[j].75(6)(1995)1226-1229.[2]r.olfati-saber,flocking for multi-agent dynamic systems:algorithms and theory,ieeetrans.automat[j].control .51(3)(2006)401-420.[3]f.xiao,l.wang,j.chen,y.gao,finite-time formation control for multi-agent systems,automatica[j].45(11)(2009)2605-2611.[4]n.cai,y.zhong,formation controllability of high-order linear time-invariant swarm systems,iet control theory appl[j].4(4)(2010)646-654.[5]a.jadbabaie,j.lin,a.s.morse,coordination of groups of mobile autonomous agents using nearest neighbor rules,ieee trans.automat.control[j].48(6)(2003)988-1001.[6]fu qiang, shin hj, lee bj, han hk. enhanced systemic exposure of fexofenadine via the intranasal administration of chitosan-coated liposome[j]. int j pharm. 2012 jul 1;430(1-2):161-6.[责任编辑:曹明明]。
非参数不确定多智能体系统一致性误差跟踪学习控制

非参数不确定多智能体系统一致性误差跟踪学习控制严求真;孙明轩;李鹤【摘要】This paper presents a consensus-error-tracking iterative learning control method to tackle the consensus problem for a class of leader-following non-parametric uncertain multi-agent systems, which perform a given repetitive task over a finite interval with arbitrary initial error. The iterative learning controllers are designed by applying Lyapunov synthesis. As the iteration increases, each following multi-agent’s consensus-error can track its desired consensus-error trajectory, and the all following multi-agents’ states perfectly track the leader’s state on the specified interval. The robust learning technique is applied to deal with the nonparametric uncertainties, and the hyperbolic tangent function is used to design feedback terms, in order to compensate the cycle-varying but bounded uncertainty. Numerical results demonstrate the effectiveness of the learning control scheme.%针对一类在有限时间区间上执行重复任务的主−从型非参数不确定多智能体系统,提出一致性误差跟踪学习控制方法,用于解决在任意初始误差情形下的一致性问题。
多个体的二分蜂拥

收稿日期:2013-6-10作者简介:赵晶晶(1984--), 男, 在读硕士。
研究方向:应用数学。
通讯作者,E-mai :286260979@-多个体的二分蜂拥一致性赵晶晶(安徽理工大学理学院 安徽 淮南 232001)摘要:本文提供无虚拟领导者的二分蜂拥一致性问题。
用结构平衡符号图论,本文证明算法保证一个二分蜂拥行为,在算法中取消一个隐函数。
在一个集合运动中,整体分成两族,在其中一族的每个个体都以相同方向运动。
同时,在不同族里的每个个体又都以相反的方向运动。
而且,在分开的两族都近似接近相同的速率,而且也要保证每个族里面避免冲突。
最后,提出的二分蜂拥控制方法通过数值仿真例子检验。
关键词:多个体,二分蜂拥。
Bipartite Flock Consens of Multi-agents SystemsJingjing ZhaoAbstract: This paper provides two swarming consistency problem without virtual leader. With the structure symbol graph, we prove that the algorithm guarantees a two swarming behavior, cancel an implicit function in the algorithm. In a set in motion, the whole is divided into two groups, in which each individual owners in the same direction. At the same time, each individual in the different family and in the opposite direction. But, in two separate approximate nearly the same rate, but also to ensure that every family inside to avoid conflict. Finally, two flocking control method is proposed through numerical simulation example test.Keywords: multi-agent Bipartite flock.1 引 言经常在生物蜂拥和人类集体行动中遇到个体有不同的运动目标,或者不同的运动方向,这些可能是由利益冲突、内部不同意见或外部干扰等等所引起[5,6]。
多智能体系统一致性问题概述

理论日臻完善阶段:逐渐探索并完善了 一致性理论在有向/无向通信网络、固 定/动态拓扑、时滞系统、信息不确定 以及异步通信中的相关问题,已形成了 相对完善的系统理论
第三阶段
(2004-)
一致性理论研究 的三个阶段
一致性协议
图论基础
图论是一致性问题分析的重要工具。对于一个多智能体系统,很自然的 会想到用图论来表示智能体之间信息交换的过程。下面是在一致性问题研究 中要用到的图论知识的总结。
一致性协议
矩阵论基础
下图是含有七个节点的有向图,并给出了其相应的邻接矩阵A 和拉普拉斯矩阵L 。
一致性问题的数学模型
一致性协议
则称多智能体系统实现一致性。
一致性协议
一阶一致性
在早期关于一致性问题的研究中,绝大多数研究工作针对 智能体为一阶智能体的情形,分析不同网络拓扑结构下实现一 致性需要满足的条件和一致性实现时的收敛值。
生物群体机制模拟阶段:主要模拟自然界 群体一致性现象以 Boid 模型和 Vicsek 模型为代表
第一阶段 (1987-1995)
理论探索研究阶 第二阶段 段:Jadbabaie (1995-2004) 等人对Vicsek 模型的一致性行 为给出了理论证 明,开辟了多智 能体一致性理论 研究的探索之路。
协同 决策
针对网络环境下订单购买(代理/决策)问题, 相关文献引入分布式一致性协议来协调订单 价格。每个买家指定不同的阈值策略,并按 此下订单。证明了分布式协议可以取得如集 中式决策相同协调效果。
生物学家Winfree指出耦合振子(Coupled
耦合振子
Oscillators)系统同步问题可以简化为研究相 位变化问题。相关文献中分析了非线性耦合振
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多个体系统的二分蜂拥一致性
文章研究了无虚拟领导者的二分蜂拥一致性问题。
提出的算法保证了二分蜂拥行为,同时取消了隐函数。
通过把运动的集合分成两族,只要在不同族里的个体以近似相同的速率往相反的方向运动,两族就能各自实现一致性。
标签:多个体;二分蜂拥;一致性
引言
经常在生物蜂拥和人类集体行动中遇到个体有不同的运动目标,或者不同的运动方向,这些可能是由利益冲突、内部不同意见或外部干扰等等所引起[3,4]。
Couzin[5]研究整体集合选择的方向,当有些个体在优先权上不同,而且会发现当领导者意见相差不多时,跟随者将会平均方向。
随着意见分歧的加大,所有的跟随者会从原来的一个方向到两个完全不同的方向。
Conradt[6]调查在整体行为上的内部利益冲突的机制,特别是同步速率和分裂。
整体分裂成两个族,发生在整体的大的冲突上[1]。
整体分裂会有许多有利的例子,如灾难逃离[6]和自然界捕食者和被捕者的情景。
但是在二分机制的深入研究也在进行,而且对于二分蜂拥设计一个分裂控制方法也是具有挑战性的任务。
这些促使我们分析性地调查研究在生物集体运动和社会整体行为的分裂现象背后的物理规则。
1 基本知识
令G(V,?着,A)代表一个符号图,其中,V={1,…,n}为节点集合;?着?哿V×V为边集合;A∈Rn×n是图G的邻接矩阵,其中aij=±1?圳(j,i)∈?着,否则aij=0。
有自环的图,文章不考虑。
G(A)的路径?籽是边集合的连通,其中所有节点k1,…,kp互相不同的。
文章中Rm是一个m维的实矢量空间;Im是一个m×m的单位矩阵,而且1n=[1,…,1]T∈Rn。
另外,符号||·||,?茚分别代表欧几里德范数,克罗内克积。
2 问题描述
考虑下面的二阶多个体系统:
(1)
假定位置和速率是的网络拓扑结构,分别用,时变网络有相同的半径R,那么个体i的邻居可以表示为Ni={j|||qi-qj||<R,(i,j)∈E}。
固定网络GP是一个无向连通的符号图,暗示A在aij=±1((j,i)∈?着p)时,是对称的,否则aij=0。
用符号L表示速率信息网络Gp的拉普拉斯矩阵。
定义1[1,2]如果多个体系统(1)作为一个整体最后分成两族,以同样的速率,其中一族中的个体往相同的方向运动;同时,另一族中的个体往相反方向运
动,称多个体系统(1)是一个二分蜂拥。
也就是对于任意的i,j∈E,limt→∞pi (t)=±limt→∞P j(t)。
更进一步,在整个进程中,不存在任何冲突,即对于任意的i,j∈E有。
3 一致性分析
设计一个控制协议:
(2)
在ui中,不仅给出了个体的位置关系,也考虑了个体的速度关系。
同时取消了隐函数,不同于文献[1]的情形。
定理1假设网络Gp(A)是一个连通的无向图,图G1(t)和G2(t)都是连通的。
在(2)作用下,如果GP(A)是平衡图,网络G1(t)和G2(t)是连通的,,则多个体系统(1)实现二分蜂拥一致性。
证明:由于GP(A)是平衡图,从引理1中得出存在一个正规变换D∈D,D=diag([?滓1,?滓2,…,?滓n]),?滓i∈{±1},那么DTAD是非负的。
考虑变换z=(D?茚Im)p,p=[p■■,…,p■■]T,z=[z■■,…,z■■]T,系统(1)可以重新写为。
构造一个李雅普诺夫函数函数:
,得:
由于■(t)是半负定的,zi(t)是有界的,因此,从第二个方程看出,如果个体i和个体j在同一个族Gl,l∈{1,2};||qij||∈(0,R);个体间的冲突可以避免,G1(t)和G2(t)是连通的,,而且■(t)也是有界的。
由于有。
多个体系统(1)在(2)的作用下,实现二分蜂拥一致性。
4 结束语
文章设计一个二分蜂拥控制协议,使得整体分裂为两个向相反方向运动的族。
用平衡图谱理论,可以使系统实现蜂拥一致性。
参考文献
[1]C.Altafini.Consensus problems on networks with antagonistic interactions[J].IEEE Trans Automatic,2012
[2]T.Zaslavsky.Signed.graphs.Discrete.Appl.Math[M]. 1982,4(1):47-74
[3]F.Harary.A matrix criterion for structural balance[J].NavalRes.Logist.Quart,
1960,7:195-199
[4]L.Conradt,J.Krause,I.D.Couzin,and T.J.Roper.Leading according to need in self-organizing groups[J].The American Naturalist,2009,173(3):304-312
[5]T.Vicsek and A.Zafeiris.Collective motion.Physics Reports[J],2012,51(3-4):71-510
[6]I.D.Couzin,J.Krause,N.R.Franks,and Simon A.Levin.Effective leadership and decision-making in animal groups on the move.Nature[J],2005,43(3):513-516.
作者简介:季亚雷(1987-),男,江苏淮安人,安徽理工大学硕士生,研究方向:多个体系统的一致性。