BootLoader的设计与实现
基于Norflash的Bootloader的设计与实现
点亮或熄灭LED来判断程序执行情况; (2)修改时钟频率; (3)使能指令Cache; (4)从串口中打印一些必要的交互信息,了解系统
状态;
(5)初始化中断,包括屏蔽中断,清除中断悬挂标志,
初始化中断向量表,注册需要的中断处理函势等: (6)打印版本、时间等信息,并从i、Jorflash复制内核
到SDRAM中,当然也可以修改指针,跳到内核固化在 FLASH中的首地址处,将控制权交给操作系统,开始在 FLASH中逐句执行内核自带的引导程序,由该引导程序 完成内核的加载工作。很明显,访问速度较慢;
(Center of Robot,GuiLin University of Electronic Technology,Gnilin,541004,China)
Abstract:Bootloader is the first programs tO lq2n when the system turns oil or reboots.And Bootloader is key joint between the operating system and the hardware,and also responsible for the initialization hardware and the guidance operating system and so on, Currently,there are some common Bootloaders,but how tO develop and port it on the basis of special hardware platform is a important and difficult question.This paper analyses the important task and realization method of Bootloader by copy the programs from Norflash tO store the SDRAM and run the O&
毕设级项目:基于单片机从零写bootloader

毕设级项目:基于单片机从零写bootloader摘要:1.引言2.单片机bootloader 简介3.单片机bootloader 设计与实现a.目标平台与工具选择b.代码烧写流程c.代码结构与组织d.重要函数与实现4.遇到的问题及解决方案a.硬件问题b.软件问题5.总结与展望正文:基于单片机的毕设项目,从零开始编写bootloader,对于学习和实践嵌入式系统的设计与开发具有很大的价值。
本文将详细介绍这一过程,包括bootloader 的设计思路、实现步骤以及遇到的问题和解决方案。
首先,我们需要了解什么是bootloader。
bootloader(引导加载程序)是嵌入式系统中的一个关键部分,它负责在系统加电后初始化硬件并执行系统启动代码。
通常情况下,bootloader 会被固化在单片机的非易失性存储器中,以保证系统能够从断电状态恢复。
接下来,我们将详细讨论单片机bootloader 的设计与实现。
首先,我们需要选择一个合适的单片机平台和相应的开发工具。
这里我们以STC89C52 单片机为例,采用Keil uVision5 作为开发环境。
在设计和实现bootloader 时,我们需要关注代码烧写流程。
一般来说,bootloader 的烧写过程可以分为以下几个步骤:1.下载程序到单片机:通过ISP(In-System Programming)或JTAG 接口将程序下载到单片机内部的非易失性存储器中。
2.跳转到bootloader 入口:单片机加电后,会从非易失性存储器中执行bootloader 的入口地址。
3.初始化硬件:bootloader 会对单片机内部和外部的硬件进行初始化,例如初始化时钟、复位和串口等。
4.烧写应用程序:bootloader 会将从串口接收到的应用程序代码烧写至单片机的程序存储器中。
5.跳转到应用程序入口:完成代码烧写后,bootloader 会跳转到应用程序的入口地址,开始执行。
基于CAN总线的Bootloader设计与实现
基于CAN总线的Bootloader设计与实现王琦;黄悦鹏;邢正阳;苏骏凯;倪孟雄【摘要】使用 BDM 工具下载或升级应用程序,不仅麻烦而且稳定性也不高。
采用在线更新的方法,设计并实现了一种基于 CAN 总线的 Bootloader。
介绍车载网络通信与诊断服务的实现、Bootloader的设计以及其在车载控制单元的实现,并在此基础上,提出最小 Bootloader 的概念,可以有效提高程序的灵活性。
实验结果证明, Bootloader 能正确引导加载程序的运行,准确方便地实现应用程序的下载和更新,在软件开发和测试过程中能够极大地提高工作效率,而且Bootloader 的稳定性也很高。
还能将网络层和 UDS 诊断服务部分方便地移植到其他芯片上,为后序的软件开发与测试提供了方便。
%Using BDM tools to download or upgrade the application brings not only inconvenience but also low reliability. This paper designs and implements a Bootloader based on CAN bus to download or update application online. It introduces implements of network communication and diagnostic services, design of Bootloader and its implements in vehicle control unit. And on this basis, it puts forward minimum Bootloader, which can improve flexibility efficiently. Test proves that Bootloader can boot and load correctly, download and update applications accurately and conveniently, which can improve efficiency in software development and test greatly. Also, stability of this Bootloader is very high. Moreover, network layer and UDS diagnostic services of this Bootloader can be transplanted to other chips, providing convenience for following software development and test.【期刊名称】《微型机与应用》【年(卷),期】2015(000)018【总页数】3页(P14-16)【关键词】引导装载程序;在线更新;诊断服务;CAN 总线【作者】王琦;黄悦鹏;邢正阳;苏骏凯;倪孟雄【作者单位】南京邮电大学通信与信息工程学院,江苏南京 210000;南京邮电大学通信与信息工程学院,江苏南京 210000;南京邮电大学通信与信息工程学院,江苏南京 210000;南京邮电大学通信与信息工程学院,江苏南京 210000;上海奉天电子有限公司,上海 201800【正文语种】中文【中图分类】TP391为了避免在更新程序的过程中拆除ECU,通过串行总线、SD卡或USB口以及相应的通信协议,将应用程序更新到单片机中[1]。
嵌入式系统BootLoader设计与实现
设计与应用计算机测量与控制.2009.17(2) Computer Measurement &Control ・389・中华测控网收稿日期:2008-07-03; 修回日期:2008-08-13。
基金项目:陕西省自然科学基金(2007F29);陕西省科技攻关项目(2007K04-01)。
作者简介:袁 磊(1983-),男,湖南衡阳人,硕士生,主要从事嵌入式系统方向的研究。
朱怡安(1960-),安徽人,教授,博导,主要从事嵌入式计算,移动计算方向的研究。
文章编号:1671-4598(2009)02-0389-03 中图分类号:TP36812 文献标识码:A嵌入式系统BootLoader 设计与实现袁 磊,朱怡安,兰 婧(西北工业大学计算机学院,陕西西安 710072)摘要:如何根据开发板的硬件资源,设计bootloader (引导加载程序)是嵌入式系统设计的重点与难点;通过分析系统的硬件组成,对bootloader 的功能,特点,结构及其主要任务进行了研究,对比分析了intel pxa250和intel pxa270的主要异同,以加载linux 操作系统内核为例,针对intel pxa270&linux 嵌入式系统开发平台,提出了一种利用uboot 实现bootloader 的软件设计与实现的新方法,从而成功引导加载操作系统内核;该设计具有一定的通用性,可广泛地应用到其他的处理器及其应用系统中;同时,详细阐述了uboot 的执行流程及其移植方法。
关键词:引导加载程序;PXA270;嵌入式系统;U -boot ;嵌入式linuxDesign and Implementation of BootLoader in embedded systemYuan Lei ,Zhu Y ian ,Lan Jing(College of Computer Science ,Northwestern Polytechnical University ,Xi πan 710072,China )Abstract :How to develop Bootloader on t he basis of specific hardware platform is a key point and difficulty of embedded system design.The paper do research on t he function ,character ,architecture and main tasks of bootloader t hrough analysing to t he organizition of system hardware.It compares t he main diferences and similarities between intel pxa250and intel pxa270.Taking loading linux operation system kernal as a example ,it introduces a new met hod on how to design and implement bootloader on t he basis of intel pxa270&linux embedded system platform.So as to sucessfully loading t he operation system kernel.The design has some flexibility and can be used to ot her proces 2sors and applications system easily.At t he same time ,it introduces how t he uboot is executed and how to transplant t he U -boot to PXA270in particular.K ey w ords :boot loader ;PXA270;embedded system ;U -boot ;embedded linux0 引言PXA270是Intel 公司生产的一款基于ARM9内核的32位RISC 芯片。
嵌入式系统中Bootloader的设计与实现

计算机操作系统的内核引导程序 (Bootloader) 是系统必 不可少的一部分 其一般要实现的功能[1]如下 (1)初始化 CPU 速度 存储器 存储器配置寄存器以及串口等 (2)激活 指令/数据 Cache 建立堆栈指针 建立启动参数区 构造参 数结构和标识列表 (3)通过上电自检,来识别存在哪些设备 并报告异常 提供对电源管理中休眠/恢复的支持 (4)跳转 到内核起始处 系统启动 当前 嵌入式应用开发中使用嵌 入式操作系统已成为一个热点 是单片机应用从低水平向高 水平的一个进步 在嵌入式操作系统中 Bootloader 也被认 为是不可缺少的一段程序[2] 它主要用作系统从硬件启动到 操作系统启动的过渡 相当于 PC 机中的 BIOS 和 OS Loader 和 BIOS OS Loader 一样 它需要固化在目标板 中 每次启动目标板时 首先会运行 Bootloader 在它完成 CPU 和相关硬件的初始化后 才从规定的地址启动操作系统 或嵌入式应用的固化程序 作者结合参加 基于信息家电的 嵌入式实时操作系统研究 (广西区科技攻关项目)的项目实 践经验 以嵌入式 Linux 系统中编写 Bootloader 以及应用 Bootloader 为实例 系统总结嵌入式系统中 Bootloader 的设 计方法 这对嵌入式设备研发中使用操作系统有很好的借鉴 意义
就开始把整个 Linux 的内核拷贝到 SDRAM 中运
0x0c00.0000 开始的第 1 个 1MB 放 Bootloader 从 0x0c10.0000 行 进入 kernel 的拷贝工作
开始的 2MB 放 Linux kernel, 从 0x0c30.0000 开始的余下部分
bootloader程序设计
讲解BOOTLOADER(启动代码)的运行机制,代码功能与实现方法。
1.为什么要编写启动代码启动代码是系统上电或复位以后运行的第一段代码,他的作用是在用户程序运行之前对系统硬件及软件环境进行必要的初始化并在最后使程序跳到用户程序.在此之前系统的所有硬件都是不好用的,初始化代码直接对ARM处理器内核及硬件控制器进行编程,所执行的操作与具体的目标系统紧密相关。
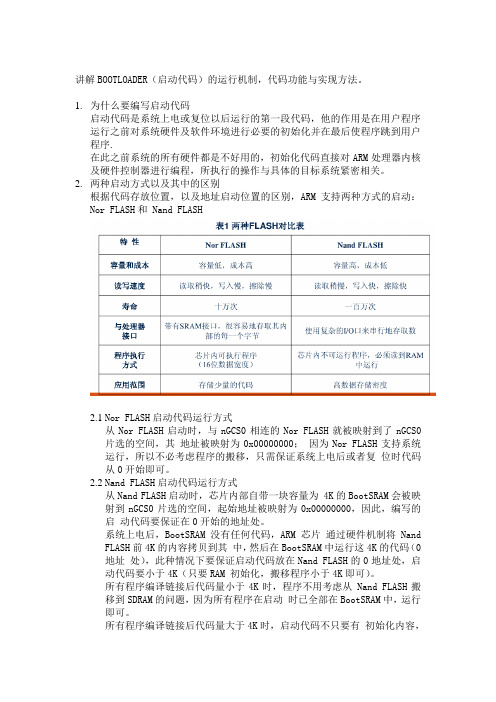
2.两种启动方式以及其中的区别根据代码存放位置,以及地址启动位置的区别,ARM支持两种方式的启动:Nor FLASH和 Nand FLASH2.1Nor FLASH启动代码运行方式从Nor FLASH启动时,与nGCS0相连的Nor FLASH就被映射到了nGCS0片选的空间,其地址被映射为0x00000000;因为Nor FLASH支持系统运行,所以不必考虑程序的搬移,只需保证系统上电后或者复位时代码从0开始即可。
2.2Nand FLASH启动代码运行方式从Nand FLASH启动时,芯片内部自带一块容量为 4K的BootSRAM会被映射到nGCS0片选的空间,起始地址被映射为0x00000000,因此,编写的启动代码要保证在0开始的地址处。
系统上电后,BootSRAM没有任何代码,ARM芯片通过硬件机制将Nand FLASH前4K的内容拷贝到其中,然后在BootSRAM中运行这4K的代码(0地址处),此种情况下要保证启动代码放在Nand FLASH的0地址处,启动代码要小于4K(只要RAM 初始化,搬移程序小于4K即可)。
所有程序编译链接后代码量小于4K时,程序不用考虑从 Nand FLASH搬移到SDRAM的问题,因为所有程序在启动时已全部在BootSRAM中,运行即可。
所有程序编译链接后代码量大于4K时,启动代码不只要有初始化内容,还要有一段搬移代码,将全部程序从Nand FLASH搬移到SDRAM,也就是系统启动时需要两次搬运,第一次将前4K搬移到BootSRAM,第二次将所有代码搬移到SDRAM中,其中第一次无需人工干预,硬件机制自动实现,第二次需要程序员编写代码实现。
毕设级项目:基于单片机从零写bootloader
毕设级项目:基于单片机从零写bootloader摘要:1.项目背景与意义2.单片机与Bootloader 简介3.Bootloader 设计与实现3.1 Bootloader 功能模块3.2 Bootloader 启动流程3.3 Bootloader 下载方式4.实验过程与结果4.1 硬件环境搭建4.2 Bootloader 程序编写4.3 Bootloader 下载验证5.总结与展望正文:【项目背景与意义】随着嵌入式系统的广泛应用,单片机在现代电子技术中占据着越来越重要的地位。
Bootloader 作为嵌入式系统的重要组成部分,负责实现系统启动、初始化以及应用程序的下载和运行。
从零开始编写Bootloader 对于深入理解单片机工作原理及提高嵌入式系统开发能力具有重要意义。
【单片机与Bootloader 简介】单片机是一种集成了CPU、存储器、外设接口等多种功能于一体的微型计算机。
Bootloader 是在单片机启动时运行的一段程序,通常包括系统初始化、Flash 存储器保护、应用程序下载和运行等功能。
【Bootloader 设计与实现】【Bootloader 功能模块】Bootloader 主要包括以下功能模块:1.系统初始化:配置单片机的工作模式,初始化外围设备,为后续操作做好准备。
2.Flash 存储器保护:防止非法访问或篡改Flash 存储器中的程序。
3.应用程序下载:通过串口、并口等通信接口接收外部发送的应用程序数据,并将其写入Flash 存储器。
4.应用程序运行:将Flash 存储器中的应用程序加载到RAM 中,并跳转到应用程序入口地址执行。
【Bootloader 启动流程】单片机上电后,首先执行Bootloader 程序。
具体流程如下:1.读取单片机内部或外部的配置信息,根据配置信息确定Bootloader 的入口地址。
2.将Bootloader 程序从Flash 存储器中读取到RAM 中,并跳转到Bootloader 入口地址执行。
嵌入式系统BOOTLOADER的设计与实现
系统加电或复位后, 所有的 C U 通常都从某个由 C U制造商预先安排的 P P 地址上取指令。比如,基于 A M7D cr 的 C U 在复位时通常都从地址 R T MI o e P 00000 x0000取它的第一条指令。 而基于 C U 构建的嵌入式系统通常都有某种 P
最后,对已经实现的 B O L A E O T O D R进行了测试和评估,并就今后的改进
方向提出了自己的意见。 关键字:嵌入式系统;B O L A E ; LN X O T O D R U IU C
Ab t a t sr c
o e i n a a u d s m d Vr aye e y ee t nc vc ds nd m nf t e t a ia e bde iul v r lcr i d ie e ge ad u c r o y n edd t l R s it w r r r h r o e t e o m a rn w n h u h e B l s se B i y L y tm. r f , OOT OADE i t fs sf a p ga t t s e a
t n ns sm av e te rvm n i t f ue h bi u o e i o h i poe et h u r. e r g p d c n m n t e K y od B O L A E , edd t U LN X ew r : T O D R e bde ss m, IU O m ye C
采用的 S C 4 0 3 4B 处理器就是 A M7 D 的内核 。 R T MI
简单的嵌入式系统一般并不使用操作系统, 只包含一些控制流程。 但是当系 统所提供的功能复杂化以后,比如需要提供图形界面等等, 这个时候就必须考虑
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
用户程序 初始化
用户程序
上一页
下一页
-20-
3.2 BootLoader初始化步骤 (1)
3.2.1 硬件初始化阶段
1 设置 中断向量表 最小硬件 初始化
① 设置中断向量表
最 小 启 动 代 码 stage1
2
中断向量表放在上电后映射在 从0x00000000开始的8*4个字节 的连续存储空间中;
其作用是指定了各种异常中断 处理程序的入口地址。
3
RTOS运行环境 初始化
返回3
上一页
下一页
-21-
3.2 BootLoader初始化步骤 (2)
3.2.1 硬件初始化阶段
1 设置 中断向量表 最小硬件 初始化
② 最小硬件初始化
最 小 启 动 代 码 stage1
2
3
RTOS运行环境 初始化
返回1
上一页
下一页
-8-
1.1 BootLoader简介 (5)
BootLoader下载方式
通过编程器将可执行目标文件烧写到
BootROM中。 通常通过串行口、网口或JTAG等接口 下载。
目标机
串口 RAM
MPU
BOOT ROM
下载工具
宿主机
网口 JTAG
返回1
上一页
下一页
-9-
1.1 BootLoader简介 (6)
返回1
上一页
下一页
-5-
1.1 BootLoader简介 (2)
嵌入式系统引导加载程序
对于PC机来说,其开机后操作系统启动前的硬件初始化操
作是由BIOS完成的; 对于嵌入式系统来说,出于通用性、价格等方面的考虑, 通常并没有像BIOS那样的固件程序; 启动时用于完成初始化操作的引导加载程序必须自行编写, 这段程序一般被称为Bootloader程序。
3.2.2 RTOS初始化阶段
4 硬件抽象层 初始化 RTOS 初始化
⑥ 启动RTOS
运行优先级最高的就绪任务; 启动RTOS时钟中断。
stage2
5
6
启动RTOS
返回3
上一页
下一页
-26-
3.2 BootLoader初始化步骤 (7)
3.2.3 用户程序初始化阶段
7 用户程序 初始化
⑦ 用户程序初始化
返回2
支持硬件协处理器的软件 未定义指令异常时进入此模式 仿真
上一页 下一页
-17-
章节目录
3.操作系统移植
内容提要
3.1 BootLoader总体流程图 3.2 BootLoader初始化步骤 3.3 编写最小启动代码
-18-
3.操作系统移植
内容提要 本章首先介绍了BootLoader 所必需实现 的功能;然后采用流程图方式介绍了 BootLoader编写的步骤;接着用图示的方法介 绍了最小启动代码的编写。
6.初始化流程
3.工作状态的选择
7.编写最小启动代码
4.工作模式的选择 移植前规划阶段
返回1
操作系统移植阶段
上一页 下一页
-11-
章节目录
2.移植前规划
内容提要
2.1 移植的硬件条件 2.2 编译器的选择 2.3 工作状态的选择 2.4 工作模式的选择
-12-
2.2 编译器的选择 (2)
常用的ARM编译器
最小启动代码
stage1阶段执行的代码,我们称之为最小启动代码。所谓
最小启动代码是指为了完成系统(OS或用户应用程序)启 动所必须的最少硬件的初始化程序。
返回1
上一页
下一页
-10-
1.3 µC/OS-II移植流程
Phase 1 Phase 2
1.移植的硬件条件
5.BootLoader框架
2.编译器的选择
中止 (abt) 用于支持虚拟内存和存储 在ARM7TDMI没有大用处 器保护 支持硬件协处理器的软件 未定义指令异常时进入此模式 仿真
上一页 下一页
与用户模式类似,但具有可以直 接切换到其它模式等特权
未定义(und)
返回2
-16-
2.4 工作模式的选择 (3)
异常模式
处理器模式 用户 系统 说明 备注 不能直接切换到其它模式
6
启动RTOS
返回3
上一页
下一页
-24-
3.2 BootLoader初始化步骤 (5)
3.2.2 RTOS初始化阶段
4 硬件抽象层 初始化 RTOS 初始化
⑤ RTOS初始化
RTOS内核启动参数初始化; RTOS扩展部件初始化。
stage2
5
6
启动RTOS
返回3
上一页
下一页
-25-
3.2 BootLoader初始化步骤 (6)
BootLoader特点
BootLoader除了依赖CPU的体系结构外,还依赖于具体的嵌
入式板级设备的配置; 对于两块不同的嵌入式开发板,即使它们是基于同一种CPU 而构建的,如果他们的硬件资源和配置不一致,要想让运 行在一块板子上的BootLoader程序也能运行在另一块板子 上,也还是需要作一些必要的修改。
BootLoader启动过程
为了增加BootLoader的通用性和可移植性,本文把启动过
程分为stagel和stage2两个阶段。 stage1阶段:执行的是用汇编语言来实现的依赖CPU体系结 构的代码,这样可以提高系统的启动速度。 stage2阶段:完成的是OS内核启动前的准备工作,多采用 处理能力强、可移植性好的C语言来实现。
为RTOS运行准备合适的RAM; 呼叫RTOS主(Main)程序。
3
RTOS运行环境 初始化
返回3
上一页
下一页
-23-
3.2 BootLoader初始化步骤 (4)
3.2.2 RTOS初始化阶段
4 硬件抽象层 初始化 RTOS 初始化
④ 硬件抽象层初始化
5
stage2
系统cache、总线设置; 中断及中断处理程序初始化; I/O端口配置; 初始化定时器; 对RTOS所需的其它设备初始化。
(irq) 用于通用中断处理 (svc) 操作系统保护代码 (abt)
用于支持虚拟内存和存储 在ARM7TDMI没有大用处 器保护 支持硬件协处理器的软件 未定义指令异常时进入此模式 仿真
上一页 下一页
未定义(und)
返回2
-15-
2.4 工作模式的选择 (2)
特权模式
处理器模式 用户 系统 说明 备注 不能直接切换到其它模式
返回1
上一页
下一页
-4-
1.1 BootLoader简介 (1)
BIOS
定义:BIOS (Basic Input/Output System)是一组固化
到计算机内主板上一个ROM芯片上的程序,它保存着计算机 最重要的基本输入输出的程序、系统设置信息、开机后自 检程序和系统自启动程序; 主要功能:是为计算机提供最底层的、最直接的硬件设置和 控制。
(usr) 正常程序工作模式 (sys) 支持操作系统的特权任务
与用户模式类似,但具有可以直 接切换到其它模式等特权
支持高速数据传输及通道 快中断(fiq) 说明 FIQ异常响应时进入此模式 处理 1.这五种模式称为异常模式; 中断 (irq) 用于通用中断处理 IRQ异常响应时进入此模式 2.可以通过程序切换进入外,也可由特定的异常进入; 3.当特定的异常出现时,处理器进入相应的模式; 管理 (svc) 操作系统保护代码 复位和软件中断时进入此模式 4.每种异常模式都有一些独立的寄存器; 5.系统上电或复位后自动进入管理(SVC)模式,本移植 用于支持虚拟内存和存储 COS-II的任务正常是运行在管理模式。 中止 (abt) 在ARM7TDMI没有大用处 器保护 未定义(und)
返回3
上一页
下一页
-19-
3.1 BootLoader总体流程图
3.1.1 总体流程图
1
设置 中断向量表
最小硬件 初始化 RTOS运行环境 初始化 硬件抽象层 初始化 RTOS 初始化
硬件 初始化
2
最 小 启 动 代 码
stage1
3
4 RTOS 初始化
5
stage2
6
启动RTOS
软件 初始化 返回3
(usr) 正常程序工作模式 (sys) 支持操作系统的特权任务
说明 支持高速数据传输及通道 1.除用户模式外,其它模式称为特权模式; 快中断(fiq) FIQ异常响应时进入此模式 处理 2.ARM内部寄存器和一些片内外设在硬件设计 上只允许(或可选为只允许)特权模式下访问; 中断 (irq) 用于通用中断处理 IRQ异常响应时进入此模式 3.特权模式可以自由的切换处理器模式,而用户 模式不能直接切换到别的模式。 管理 (svc) 操作系统保护代码 复位和软件中断时进入此模式
目前,比较流行的编译器有SDT、ADS、IAR、KEIL和GCC等,
其中SDT和ADS均为ARM公司开发,ADS为SDT的升级版。
本移植采用的编译器
ADS1.2(ARM Developer Suite )集成开发环境。
返回2
上一页
下一页
-13-
2.3 工作状态的选择
ARM处理器工作状态
自从ARM7TDMI Core以后,体系结构中具有T变种的ARM处
理器核可以工作在以下两种状态。 ARM状态
ARM状态下执行字对准的32位ARM指令;
Thumb状态 Thumb状态下执行半字对准的16位Thumb指令。