微机启动过程分析
课件演示微机的启动过程

学院:数信学院 系别:计算机系 班级:2004级乙班 姓名:韩三宝 学号:200471030104
微机的启动意味着将存于硬盘或软盘的操 作系统装入微机内存
一台正常的微机的启动过程大至分为九个阶段: 第一阶段:电源工作,Cpu复位 第二阶段:硬盘检查与设置检查 第三阶段:读取分区记录和主引导记录 第四阶段:读取Dos引导记录 第五阶段:装载系统隐含文件 第六阶段:执行Dos的引导过程 第七阶段:装入Dos的引导过程 第八阶段:执行批处理文件 第九阶段:启动完成
The end
谢谢收看!Βιβλιοθήκη 微机的启动过程总线
系统区域
1 CPU 3
ROM 易失性
OS 用户区
BIOS
内存
.OS
Word
Game
Etc
2
自检
引导
ROM
硬盘 ,外存(辅存)
当微机启动后,CPU执行 “取指令 ,只执行 指令”程序 ,该程 序为内存中ROM中的BIOS它包括 自检和引导 两部分 。 检查计算机 硬件无问题 后,引导操作系统的一部分从硬盘进入 内存,等待命令。当有新的程序进入时,从一个等待状态跳出, 执行新的指令。
微机点火的工作原理

微机点火的工作原理微机点火系统是现代内燃机上常见的一种点火系统,它采用电子控制单元(ECU)作为中心控制器,通过精确控制点火时机和点火能量,以提高燃油的燃烧效率和减少排放。
微机点火系统的工作原理如下:1. 传感器检测:微机点火系统依赖于各种传感器来获取引擎工作状态的实时信息。
这些传感器可以包括曲轴位置传感器、气缸压力传感器、氧气传感器等,它们将引擎转速、气缸压力、残余气体成分等信息传递给ECU。
2. 数据处理:ECU收集传感器传来的数据,并通过内部的算法进行处理和分析。
基于传感器数据以及预设的工作参数和燃油供应策略,ECU确定最佳点火时机和点火能量。
3. 点火信号发出:ECU根据计算出的点火时机和点火能量,向点火线圈发送控制信号。
点火线圈是负责产生高压电流并将其传送到火花塞的设备。
4. 火花塞点火:点火线圈接收到控制信号后,通过变压器原理将低电压升高到足够高的电压,然后将其传递到火花塞。
火花塞利用这个高压电流产生电火花,将点火混合气体点燃。
5. 燃烧反应:点火产生的火花使得燃烧室内的可燃混合气体燃烧起来。
根据提前点火或者延迟点火的策略,ECU可以控制燃烧过程的时间和速率,以达到最佳的燃烧效率。
6. 反馈控制:ECU根据点火后的传感器反馈信息,如氧气传感器输出值、火花塞电极间隙电压等,进行实时的调整和优化。
这样可以保证连续点火时,系统的工作状态始终处于最佳状态。
通过以上的步骤,微机点火系统可以实现精确控制和调整点火时机和点火能量,以提高发动机的功率、经济性和排放性能。
同时,由于微机点火系统的技术先进和控制精准,还能实现多种点火策略,如多点火、正时点火、连续点火等,以应对不同工况和驾驶需求。
计算机启动过程
2006年8月
《计算机操作系统》--第2章 处理机管理
9
附一: BIOS与 附一: BIOS与CMOS
CMOS说明: 说明: 说明 互补金属氧化物半导体 存储微机系统的硬件配置等信息 128个字节 系统加电引导机器时,要读取CMOS信息, 用来初始化机器各个部件的状态 系统电源和后备电池供电,耗电极低 BIOS ROM中的“系统设置程序” 设置 CMOS RAM中的参数(称作‘BIOS’设置)
操作系统
北京理工大学珠海学院 计算机学院 龚友明
附一:计算机启动过程 附一:
第一步 BIOS启动 1. 从BIOS芯片中读出指令代码 2. BIOS程序完整性检验 3. RAM数量,RAM读写检验 4. 键盘和其他基本设备检验 5. 扫描ISA和PCI总线,寻找连上的所有设备 6. 即插即用设备(PnP) 7. CMOS设备清单 8. BIOS配置程序 9. 将所有配置数据ESCD写入CMOS中
2006年8月 《计算机操作系统》--第2章 处理机管理 2
启动电脑原理 当电脑的电源打开,BIOS就会由主板上的闪存(flash memory)运行 ,并将芯片组和存储器子系统初始化。BIOS会把自己从闪存中,解压 缩到系统的主存;并且从那边开始运行。PC的BIOS代码也包含诊断功 能,以保证某些重要硬件组件,像是键盘、磁盘设备、输出输入端口 等等,可以正常运作且正确地初始化。几乎所有的BIOS都可以选择性 地运行CMOS存储器的设置程序;也就是保存BIOS会访问的用户自定 义设置数据(时间、日期、硬盘细节,等等)。IBM技术参考手册中 曾经包含早期PC和AT BIOS的80x86源代码。 现代的BIOS可以让用户选择由哪个设备启动电脑,如光盘驱动器、硬 盘、软盘、USB 闪存盘等等。这项功能对于安装操作系统、以LiveCD 启动电脑、以及改变电脑找寻开机媒体的顺序特别有用。 有些BIOS系统允许用户可以选择要加载哪个操作系统(例如从第二颗 硬盘加载其他操作系统),虽然这项功能通常是由第二阶段的开机管 理程序(boot loader)来处理
计算机常见故障

19
微机启动故障及排除
微机启动过程分析
一台正常的微机的启动过程大致可分为如下几个阶段: ⒈初始化 [一]打开电源开关,电源通电工作,并输出信号将CPU复位[Reset]. [二]检查并初始CPU,以确保CPU正确执行ROM BIOS的程序; [三]由CPU将POST[加电自检]程序调入内存并执行.
[一]硬盘适配卡[或多功能卡]没有插好或卡上的接插线及跳线设置不当; [二]硬盘适配器故障; [三]硬盘故障或没有安装硬盘但在CMOS中设置了硬盘参数.
25
启动二、三阶段出现的故障
⒋“FDD controller failure press <F一> resume[软驱控制器失效,按F一重新开 始]”提示的原因及处理方法等.
5
计算机常见故障的处理流程图
6
计算机系统检测流程
计算机开机启动软故障
一.电源故障 计算机开机启动后,除电源输出电压正
常外,还输出“电源好”[Power good]信 号,用于复位CPU,若无此信号输出,则不可 能启动计算机.
8
计算机开机启动软故障
二.加载主引导记录错故障 [一]无效的分区表产生的故障分析与处理. [二]加载操作系统出错故障分析与处理. [三]错误的操作系统产生的故障分析与处理.
23
启动二、三阶段出现的故障
●CMOS System Options Not Set[CMOS系统参数没有设置] CMOS系统参数丢失或被破坏,进入SETUP重新设置. ●CMOS Time&Date Not Set[CMOS时间和日期没有设置] CMOS中的时间和日期参数没有设置,进入标准CMOS进行设置. ●CMOS Battery State Low[CMOS电池低电压] [一]主板上给CMOS供电的电池电压不足.由于大多数主板上的电池都是充 电电池,可以开机工作一段时间,电池充电后即可继续工作.如充电后仍不能在较 长时间内[几天时间]保持设置参数,则需要更换电池; [二]出现过电池断电的现象.如主板上的CMOS复位跳线连接过,使主机设 置的参数全部丢失.只要启动微机后进入SETUP重新设置CMOS参数即可; [三]有少数主板出厂时未装电池,组装时不要忘记安装电池.
关于HXD 3型机车微机控制系统冗余启动时显示屏待机现象及处置方法的探讨

关于HXD 3型机车微机控制系统冗余启动时显示屏待机现象及处置方法的探讨摘要:HXD3型电力机车在运行过程中,由于微机控制系统在冗余启动过程中,发生微机显示屏待机或乘务员采取解锁后无人警惕装置倒计时对话框不消失现象。
结合HXD3型机车微机控制系统冗余启动原理、待机现象,对故障发生的原理、现象和应急处置进行探讨。
关键词:微机显示屏;无人警惕;冗余启动原理;待机一、HXD3型电力机车的微机控制系统冗余控制原理:HXD3型电力机车的微机控制系统(简称TCMS),在正常工作时分为两组分别工作,即微机控制系统1系和微机控制系统2系均正常工作。
如果在运行中某微机控制系统自检失败,控制系统将自动切换,另一组系统将冗余启动直接接管。
微机控制系统在正常工作时,微机控制系统1系管理I端微机显示屏正常工作功能,微机控制系统2系管理II端微机显示屏正常工作功能。
在微机控制系统由1系向2系冗余启动过程中,微机显示屏要等待与微机控制系统通讯正常后才能够正常工作,即微机显示屏在微机控制系统冗余启动过程中将存在待机时间(约10-15S),待微机系统2系冗余启动正常后,由2系微机系统直接管理两端微机显示屏。
二、HXD3型电力机车的微机控制系统冗余启动待机过程出现的现象1、HXD3型机车运行过程中若微机控制系统1系自检失败,在微机控制系统2系冗余启动时间内,I端微机显示屏在微机控制系统冗余启动过程中将存在待机时间;此时如果无人警惕装置20S倒计时窗口弹出,司机采取解锁措施出现以下㈠或㈡两种状态。
状态㈠:采取解锁措施,无人警惕装置20S倒计时报警解锁,倒计时窗口消失或窗口继续倒计时,控制系统没有产生惩罚制动,则继续运行。
状态㈡:采取解锁措施,无人警惕装置20S倒计时报警未解锁,倒计时窗口继续倒计时并产生惩罚制动,则停车后按以下方法进行处置:⑴控制系统产生惩罚制动停车后,可将大闸手柄置“抑制”位放置1S以上时间,机车正常缓解试验“惩罚制动”消除,则继续开车运行。
微机使用方法
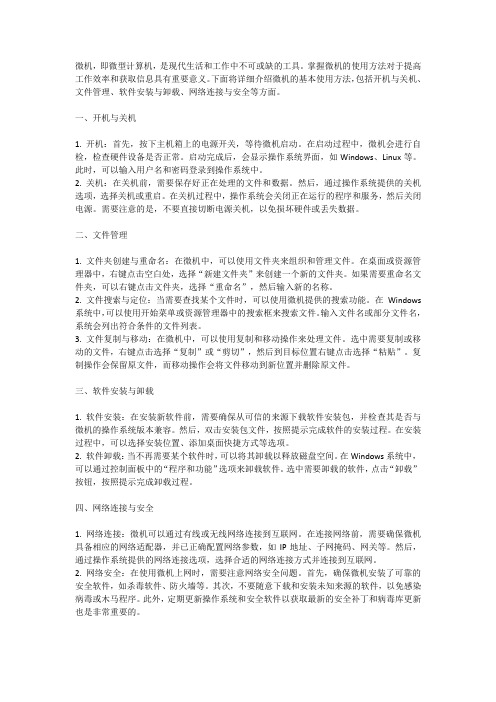
工作效率和获取信息具有重要意义。
下面将详细介绍微机的基本使用方法,包括开机与关机、文件管理、软件安装与卸载、网络连接与安全等方面。
一、开机与关机1. 开机:首先,按下主机箱上的电源开关,等待微机启动。
在启动过程中,微机会进行自检,检查硬件设备是否正常。
启动完成后,会显示操作系统界面,如Windows、Linux等。
此时,可以输入用户名和密码登录到操作系统中。
2. 关机:在关机前,需要保存好正在处理的文件和数据。
然后,通过操作系统提供的关机选项,选择关机或重启。
在关机过程中,操作系统会关闭正在运行的程序和服务,然后关闭电源。
需要注意的是,不要直接切断电源关机,以免损坏硬件或丢失数据。
二、文件管理1. 文件夹创建与重命名:在微机中,可以使用文件夹来组织和管理文件。
在桌面或资源管理器中,右键点击空白处,选择“新建文件夹”来创建一个新的文件夹。
如果需要重命名文件夹,可以右键点击文件夹,选择“重命名”,然后输入新的名称。
2. 文件搜索与定位:当需要查找某个文件时,可以使用微机提供的搜索功能。
在Windows 系统中,可以使用开始菜单或资源管理器中的搜索框来搜索文件。
输入文件名或部分文件名,系统会列出符合条件的文件列表。
3. 文件复制与移动:在微机中,可以使用复制和移动操作来处理文件。
选中需要复制或移动的文件,右键点击选择“复制”或“剪切”,然后到目标位置右键点击选择“粘贴”。
复制操作会保留原文件,而移动操作会将文件移动到新位置并删除原文件。
三、软件安装与卸载1. 软件安装:在安装新软件前,需要确保从可信的来源下载软件安装包,并检查其是否与微机的操作系统版本兼容。
然后,双击安装包文件,按照提示完成软件的安装过程。
在安装过程中,可以选择安装位置、添加桌面快捷方式等选项。
2. 软件卸载:当不再需要某个软件时,可以将其卸载以释放磁盘空间。
在Windows系统中,可以通过控制面板中的“程序和功能”选项来卸载软件。
选中需要卸载的软件,点击“卸载”按钮,按照提示完成卸载过程。
微机的启动过程大致可分为如下几个阶段
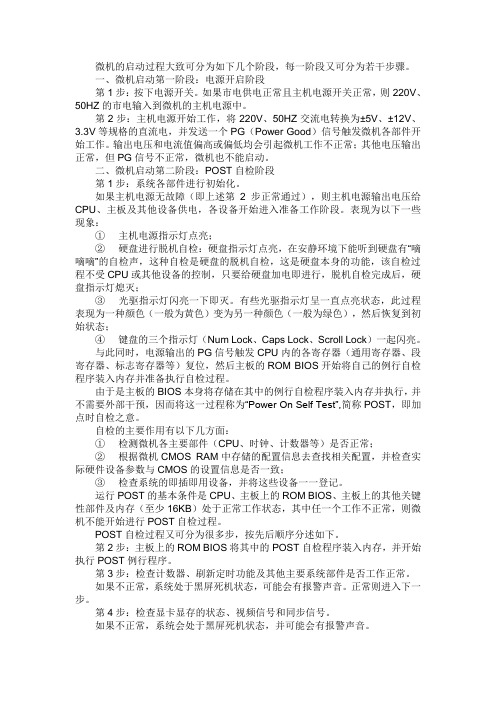
微机的启动过程大致可分为如下几个阶段,每一阶段又可分为若干步骤。
一、微机启动第一阶段:电源开启阶段第1步:按下电源开关。
如果市电供电正常且主机电源开关正常,则220V、50HZ的市电输入到微机的主机电源中。
第2步:主机电源开始工作,将220V、50HZ交流电转换为±5V、±12V、3.3V等规格的直流电,并发送一个PG(Power Good)信号触发微机各部件开始工作。
输出电压和电流值偏高或偏低均会引起微机工作不正常;其他电压输出正常,但PG信号不正常,微机也不能启动。
二、微机启动第二阶段:POST自检阶段第1步:系统各部件进行初始化。
如果主机电源无故障(即上述第2步正常通过),则主机电源输出电压给CPU、主板及其他设备供电,各设备开始进入准备工作阶段。
表现为以下一些现象:①主机电源指示灯点亮;②硬盘进行脱机自检:硬盘指示灯点亮,在安静环境下能听到硬盘有“嘀嘀嘀”的自检声,这种自检是硬盘的脱机自检,这是硬盘本身的功能,该自检过程不受CPU或其他设备的控制,只要给硬盘加电即进行,脱机自检完成后,硬盘指示灯熄灭;③光驱指示灯闪亮一下即灭。
有些光驱指示灯呈一直点亮状态,此过程表现为一种颜色(一般为黄色)变为另一种颜色(一般为绿色),然后恢复到初始状态;④键盘的三个指示灯(Num Lock、Caps Lock、Scroll Lock)一起闪亮。
与此同时,电源输出的PG信号触发CPU内的各寄存器(通用寄存器、段寄存器、标志寄存器等)复位,然后主板的ROM BIOS开始将自己的例行自检程序装入内存并准备执行自检过程。
由于是主板的BIOS本身将存储在其中的例行自检程序装入内存并执行,并不需要外部干预,因而将这一过程称为“Power On Self Test”,简称POST,即加点时自检之意。
自检的主要作用有以下几方面:①检测微机各主要部件(CPU、时钟、计数器等)是否正常;②根据微机CMOS RAM中存储的配置信息去查找相关配置,并检查实际硬件设备参数与CMOS的设置信息是否一致;③检查系统的即插即用设备,并将这些设备一一登记。
微机原理loop

微机原理loop 1. 微机原理概述• 1.1 微机的定义• 1.2 微机的发展历程• 1.3 微机的组成与工作原理• 1.4 微机的分类2. 微机的运行过程• 2.1 微机的启动过程• 2.2 微机的工作原理• 2.3 微机的指令执行流程3. 微机原理中的Loop• 3.1 循环的概念• 3.2 循环结构在编程中的应用• 3.3 微机原理中Loop的实现方法4. 微机原理中的Loop优化• 4.1 Loop的性能影响因素• 4.2 Loop的优化技巧• 4.3 微机原理中Loop优化的实践案例5. 微机原理中Loop案例分析• 5.1 微机原理中Loop在汇编语言中的应用• 5.2 微机原理中Loop在高级语言中的应用• 5.3 微机原理中Loop在嵌入式系统中的应用6. 微机原理中Loop的问题与挑战• 6.1 微机原理中Loop可能遇到的问题• 6.2 微机原理中Loop的挑战与解决方法• 6.3 微机原理中Loop的发展趋势7. 总结•7.1 微机原理中Loop的重要性与应用价值•7.2 微机原理中Loop的发展前景•7.3 结束语1. 微机原理概述1.1 微机的定义微机是指由微处理器、存储器、输入输出设备等组成的个人电脑系统。
它具有体积小、功能强大、适用广泛等特点,成为现代信息社会中不可或缺的一部分。
1.2 微机的发展历程微机的发展可以追溯到20世纪70年代,随着微处理器技术的发展,原先庞大昂贵的计算机系统逐渐被集成在一个芯片上,从而形成了微机。
1.3 微机的组成与工作原理微机主要由主机和外设组成。
主机包括中央处理器(CPU)、存储器(内存)、输入输出接口(I/O)、总线等部分。
微机的工作原理是通过CPU执行指令,完成对存储器中数据的读写操作,并通过输入输出接口与外设进行数据的输入输出。
1.4 微机的分类根据体积和用途的不同,微机可以分为台式机、笔记本电脑、平板电脑等多种类型。
它们在形态和性能上有所差异,但都属于微机范畴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微机启动过程分析
微机在启动过程中要经历很多的操作,每一步工作完成后才能进行下一步工作。
微机的大多数故障(特别是硬件故障)都出在微机启动阶段,深入了解微机启动的详细过程,就能够根据故障现象快速地推断出故障点所在,而不是盲目地试验。
微机的启动过程大致可分为如下几个阶段,每一阶段又可分为若干步骤。
一、微机启动第一阶段:电源开启阶段
第1步:按下电源开关。
如果市电供电正常且主机电源开关正常,则220V、50HZ的市电输入到微机的主机电源中。
第2步:主机电源开始工作,将220V、50HZ交流电转换为±5V、±12V、3.3V等规格的直流电,并发送一个PG(Power Good)信号触发微机各部件开始工作。
输出电压和电流值偏高或偏低均会引起微机工作不正常;其他电压输出正常,但PG信号不正常,微机也不能启动。
二、微机启动第二阶段:POST自检阶段
第1步:系统各部件进行初始化。
如果主机电源无故障(即上述第2步正常通过),则主机电源输出电压给CPU、主板及其他设备供电,各设备开始进入准备工作阶段。
表现为以下一些现象:
①主机电源指示灯点亮;
②硬盘进行脱机自检:硬盘指示灯点亮,在安静环境下能听到硬盘有“嘀嘀嘀”的自检声,这种自检是硬盘的脱机自检,这是硬盘本身的功能,该自检过程不受CPU或其他设备的控制,只要给硬盘加电即进行,脱机自检完成后,硬盘指示灯熄灭;
③光驱指示灯闪亮一下即灭。
有些光驱指示灯呈一直点亮状态,此过程表现为一种颜色(一般为黄色)变为另一种颜色(一般为绿色),然后恢复到初始状态;
④键盘的三个指示灯(Num Lock、Caps Lock、Scroll Lock)一起闪亮。
与此同时,电源输出的PG信号触发CPU内的各寄存器(通用寄存器、段寄存器、标志寄存器等)复位,然后主板的ROM BIOS开始将自己的例行自检程序装入内存并准备执行自检过程。
由于是主板的BIOS本身将存储在其中的例行自检程序装入内存并执行,并不需要外部干预,因而将这一过程称为“Power On Self Test”,简称POST,即加点时自检之意。
自检的主要作用有以下几方面:
①检测微机各主要部件(CPU、时钟、计数器等)是否正常;
②根据微机CMOS RAM中存储的配置信息去查找相关配置,并检查实际硬件设备参数与CMOS的设置信息是否一致;
③检查系统的即插即用设备,并将这些设备一一登记。
运行POST的基本条件是CPU、主板上的ROM BIOS、主板上的其他关键性部件及内存(至少16KB)处于正常工作状态,其中任一个工作不正常,则微机不能开始进行POST自检过程。
POST自检过程又可分为很多步,按先后顺序分述如下。
第2步:主板上的ROM BIOS将其中的POST自检程序装入内存,并开始执行POST例行程序。
第3步:检查计数器、刷新定时功能及其他主要系统部件是否工作正常。
如果不正常,系统处于黑屏死机状态,可能会有报警声音。
正常则进入下一步。
第4步:检查显卡显存的状态、视频信号和同步信号。
如果不正常,系统会处于黑屏死机状态,并可能会有报警声音。
如果正常,则整个微机系统无致命性故障。
此时可能会听到很清脆的“嘀”的一声(对于Award BIOS而言),有的微机是响两声,有的微机则并无提示声音。
此时,微机的显示子系统开始工作。
对于较新的数控显示器,信号灯开始由一闪一闪状态(一般为黄色)变为点亮状态(一般为绿色),显示器屏幕顶端会出现显卡BIOS的版本信息、显卡类型、显存容量等信息。
显卡信息在屏幕上一闪而过,无法通过按“Pause”键停留住,冷开机或按RESET键能出现此信息,而按“Ctrl”+“Alt”+“Del”键重启时有时不会出现此信息。
如果不知道显卡的型号或显存的数量,可用此方法查看。
当显卡子系统开始工作后,微机就可以将主板上的BIOS信息显示到屏幕上。
此时可按“Pause”键停留住屏幕信息,以便仔细查看。
在以下的步骤中,POST自检程序开始按照CMOS RAM中存储的配置信息或主板上配置信息(如CPU的外频和倍频信息、内存数量等)去找相关设备,并进行对比,此时可以按“Del”键进入CMOS设置画面重新设置相关配置信息。
第5步:检查CPU的主频。
有的微机系统CPU的频率是在CMOS中设置的,有的是通过主板上的跳线开关设置的。
第6步:检查RAM内存容量。
如果在CMOS中将“Quick Power On Test”设置为“Disabled”,则将检测三次。
第7步:检查键盘功能,此时键盘的三个指示灯(Num Lock、Caps Lock、Scroll Lock)再次地一起闪亮。
第8步:检查主板及扩展槽上即插即用设备(如显示卡、声卡、视频卡、Modem等)和串口、并口等I/O设备,如果不正常,将给出相关的错误提示信息。
第9步:检查软驱子系统复位和寻道能力,如果在CMOS的设置中将“Boot up Floppy Seek”一项设为“Enabled”,则会看到软驱电源指示灯亮,同时伴有“嘎吱”的声音,这是软驱在寻道,即软驱的磁头来回移动一圈,并最后将磁头复位到0磁道的位置,随时准备读取软盘信息。
如果不正常,将有错误提示信息。
第10步:检查IDE控制器状态(硬盘、光驱等),检测IDE接口的硬盘和光驱信息。
此时硬盘电源指示灯闪亮。
如果不正常,将给出错误提示信息。
第11步:如果以上一切正常,则将所有的设备信息做一总结,并在显示器上显示出来,如图4-3所示。
图4-3显示了POST检测到的系统设备和PCI即插即用设备信息,据此可确定某个设备是否有硬件损坏,如果能够检测到相关设备,则可以大致确定该设备无硬件故障。
最后,根据CMOS中所设置的引导顺序,准备引导系统。
三、微机启动第三阶段:系统引导阶段
第1步:如果从硬盘引导系统,则BIOS访问硬盘的0道0面1扇区,将硬盘的主引导代码的前部分装入内存,并将系统的控制权转交给硬盘的MBR。
如果是软盘启动或光盘启动则没有此步操作。
第2步:如果从硬盘引导系统,硬盘MBR将C盘的DBR(逻辑0扇区,即硬盘物理地址的0道1面1扇区)的前部分装入内存,并将系统的控制权交给DBR。
如果是从软盘启动或从光驱启动,则BIOS直接将软盘或光盘的DBR(逻辑0扇区)装入内存,同时将控制权移交给DBR。
在以下的步骤中,DOS和Windows98系统的启动过程有所不同。
对于DOS系统而言,有以下几步操作。
第3步:DBR将DOS的两个系统文件(Io.sys、Msdos.sys)装入内存。
第4步:将DOS的装入内存。
第5步:装载Config.sys中的设备驱动程序。
第6步:装载或运行Autoexec.bat中的程序或系统设置信息。
对于第5步和第6步的操作,可以在微机刚开始引导操作系统时(自检刚完成),通过按特殊功能键来有选择地执行这两步操作。
有两种方式:
①按F5功能键,略过这两步的操作过程,直接进入命令提示符“C:\>_”状态,即不加载Config.sys中的设备驱动程序,也不运行Autoexec.bat中的批命令;
②按F8功能键,可以一步一步地有选择地执行Config.sys和Autoexec.bat中的每一行程序,如果微机故障出在这个阶段,可以通过这种方法来判断。
对于Windows98系统而言,系统文件和系统配置文件包括以下一些文件:Io.sys、Msdos.sys、Config.sys、Autoexec.bat和Bootlog.txt等。
微机的启动方式和启动过程比DOS要复杂得多。
Windows98有多种启动方式,通过设置Msdos.sys文本文件中的相关条目可以实现菜单启动方式(详见3.7.2节)。
另外,在POST自检完成并开始启动Windows98系统时,按F8功能键也可激活Windows98的启动菜单。
①Normal:正常启动方式,默认的启动方式。
②Logged(\Bootlog.txt):按Bootlog.txt中的项目引导系统。
③Safe mode:安全模式启动方式。
④Step-by-Step confirmation:逐步确认启动方式。
⑤Command prompt only:命令提示符启动方式(DOS7.1的“C:\>_”状态)。
⑥Safe mode command prompt only:安全模式命令提示符启动方式。
⑦Previous Version of MS-DOS:启动到以前的DOS版本(DOS6)。
可以从中选择一种启动方式启动系统。
第7步:系统启动成功,开始运行相关应用软件。