安卓版四轴飞行器操作手册B
tb509四轴飞行器操作说明

TB509四轴飞行器操作说明1. 简介TB509四轴飞行器是一种小型无人机,具有稳定的飞行性能和灵活的操控能力。
本操作说明将介绍如何正确操作TB509四轴飞行器,包括起飞、降落、悬停、前进、后退、左右平移、旋转等基本操作。
2. 准备工作在操作TB509四轴飞行器之前,需要进行以下准备工作: - 确保电池电量充足,并正确安装到飞行器上。
- 将遥控器与飞行器进行配对。
- 找到开阔的空地,远离高楼、电线等障碍物。
3. 操作步骤步骤1:起飞1.将遥控器的油门推到最低位置。
2.飞行器和遥控器都打开电源。
3.将遥控器的油门缓慢推至最高位置,观察飞行器是否开始起飞。
4.如果发现偏移或不稳定,可以通过微调遥控器上的方向杆来调整姿态。
步骤2:悬停1.在成功起飞后,将油门推至中间位置,飞行器将悬停在空中。
2.如果飞行器出现晃动或不稳定,可以通过微调遥控器上的方向杆来调整姿态。
步骤3:前进、后退、左右平移1.前进:将遥控器的右操纵杆向前推动,飞行器将向前飞行。
2.后退:将遥控器的右操纵杆向后拉动,飞行器将向后飞行。
3.左平移:将遥控器的左操纵杆向左推动,飞行器将向左平移。
4.右平移:将遥控器的左操纵杆向右推动,飞行器将向右平移。
步骤4:旋转1.顺时针旋转:将遥控器的左操纵杆顺时针旋转,飞行器将顺时针旋转。
2.逆时针旋转:将遥控器的左操纵杆逆时针旋转,飞行器将逆时针旋转。
步骤5:降落1.将遥控器的油门缓慢推至最低位置,飞行器开始降落。
2.在降落过程中,观察飞行器的高度,并适时微调油门,以确保平稳降落。
4. 注意事项1.在操作飞行器时,要保持冷静,不要过度操控。
2.飞行器应该在开阔的空地上操作,远离人群和障碍物。
3.飞行器不应该在恶劣天气条件下飞行,如大风、雨雪等。
4.在起飞和降落时要特别注意安全,避免伤害自己或他人。
5.飞行器的电池电量应该足够进行操作,并及时充电。
以上就是TB509四轴飞行器的操作说明。
希望通过本文的介绍,您能够正确、安全地操作TB509四轴飞行器,并享受到无人机带来的乐趣。
型号s186F的四轴空中飞行器使用说明
型号s186F的四轴空中飞行器使用说明一、起飞操作步骤1、打开遥控器的电源开关,遥控器的指示灯此时为闪亮,必须将油门先推至最大控制行程,再归置最底位,指示灯变为常亮。
遥控器进入正常用遥控状态。
2、将电池安装到飞碟的电池架上。
接通飞碟上的电源。
3、将飞碟平稳放在平整的地面上,让接收板上的红色指示灯从快闪状态变为慢闪状态,飞碟进入遥控状态。
重要提示:因飞碟通电后接收板上的陀螺仪需要和水平面校正,必须确保放置的地面是水平面。
飞碟才能进入正常的遥控状态,并且遥控和飞行器的开关顺序一定要严格按照步骤来,否则容易导致飞碟失控。
二、飞行前附加说明1、白色螺旋桨为飞碟前面,黑色螺旋桨为飞碟后面。
2、飞碟通电后,检查螺旋桨旋转方向。
左前方/右后方螺旋桨顺时针方向旋转,右前方/左后方螺旋桨逆时针方向旋转。
3、飞行中若出现飞碟偏向一边,可以通过遥控器微调来调整。
三、飞行控制1、当左右操纵杆向左、右动作时,飞碟同步向左、右飞行。
2、当油门操纵杠向上、下动作时,飞碟同步向上、下飞行。
3、当转向操纵杠向左、右动作时,飞碟头部同步向左、右飞行。
4、当前后操纵杆向上、下动作时,飞碟同步向前、后飞行。
使用步骤详解:1、将四旋翼飞行器的开关调至ON,将遥控器的开关调至ON。
2、把遥控器的摇杆,上下左右摇杆推拉一下,进行配对,如果遥控器鸣一声,则视为配对成功3、推动摇杆,进行四旋翼飞行器的控制。
4、拉杆推动练习,将左摇杆推上即为飞机往上向上飞,如果将左摇杆向下推则为下降,右摇杆则为控制左右前进方向。
5、降落,缓缓地将摇杆向下拉,右右摇杆不要动左摇杆慢慢的向下拉直至降落成功。
四轴可调多轴器安全操作及保养规程

四轴可调多轴器安全操作及保养规程作为一种常见的无人机设备,四轴可调多轴器在近年来越来越多地被应用于各行各业,具有高稳定性、可塑性强的特点。
但随着无人机安全管理日益严格,良好的操作习惯和保养规程在四轴可调多轴器的使用过程中显得尤为重要。
本文将从安全操作和保养两个方面,对四轴可调多轴器的相关规程进行详细说明和介绍。
安全操作规程1. 飞行前准备在飞行前,应做好以下安全准备工作:•确认无人机和遥控器是否连接正确,测试控制时是否灵敏、正常;•检查无人机结构、电机、螺旋桨等部位有无损伤、锈蚀等情况,并加贴电机防护罩等防护装置;•检查电池电量是否充足,若不足应及时更换或充电;•飞行前根据天气和场地情况,选择合适的起飞点,避免飞行过程中遇到障碍物或过于复杂的场地。
2. 飞行中操作在飞行中,应注意以下事项:•当飞行时感受到异常震动或不稳定情况时,应立即将无人机控制器降落并检查原因;•避免在有人群、机动车或高压电线等地方飞行;•飞行时注意障碍物和阻碍飞行的物体;•飞行时不要绕圈飞行或尽量避免小圆弧拐弯,以免无人机失速、掉头或掉落;•飞行不要太过于高空,以免无人机失速或掉落;•禁止在迷雾、强风、雷雨等恶劣天气情况下飞行。
3. 紧急措施在出现突发状况、紧急情况时,应及时采取措施:•当飞机失速、失控时,遥控器应及时降落,然后进行检查和修理;•当飞机遗失或跑飞时,及时报警,并联系相关部门进行寻找和追踪;•当发现无人机电机或螺旋桨等部位着火时,应立即止火,并在安全区内处理。
同时,避免使用较为易燃的电池和材料。
保养规程除了安全操作规程,四轴可调多轴器的保养工作也同样重要。
1. 保养前准备在进行保养前,应做好以下准备工作:•关闭机身上电源开关,并拔下电池;•检查无人机结构、电机、螺旋桨等部位有无损伤、锈蚀等情况,并加贴电机防护罩等防护装置;•检查飞控系统、电池和接线等部位有无松动情况。
2. 日常保养日常保养包括以下几个方面:•定期检查电池、电机和螺旋桨等部位的状态,是否有损坏情况,及时更换;•清洗无人机结构、螺旋桨和机头等部位的灰尘和沙石等杂质;•对飞控器进行维修、升级等必要的保养和维护。
四轴工作流程
四轴工作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!Download Tip: This document has been carefully written by the editor. I hope that after you download, they can help you solve practical problems. After downloading, the document can be customized and modified. Please adjust and use it according to actual needs. Thank you!四轴飞行器(常见为无人机)工作流程简述如下:启动准备流程:①检查设备:确保四轴无人机各部件完好,电池电量充足,遥控器设置正确。
②开机自检:开启无人机和遥控器电源,系统自动进行自检,包括传感器、电机等。
③遥控器配对:确认遥控器与无人机成功连接,部分机型需手动对频。
起飞流程:①预热电机:在安全区域,轻微推油门使电机预热,检查电机旋转方向是否正确。
②姿态调整:通过遥控器调整无人机水平,确保起飞前的稳定性。
③起飞指令:缓慢推动油门,当无人机离地后,继续平稳增加高度至预定飞行高度。
飞行控制流程:①方向操控:通过遥控器的操纵杆控制四轴无人机的上升、下降、前进、后退、左右平移及旋转。
②姿态维持:内置陀螺仪和加速计等传感器持续监测并自动调整,维持飞行姿态稳定。
③航线规划:高级模式下,可预先设定飞行路线,无人机按规划自主飞行。
降落流程:①降低高度:逐渐减小油门,使无人机缓缓下降。
②姿态调整:接近地面时,精细调整无人机位置和姿态,确保平稳。
③触地停止:轻轻触地后,完全关闭油门,确保无人机完全停稳。
结束流程:①关机断电:确认无人机完全停稳后,先关闭遥控器电源,再关闭无人机电源。
微型四轴安装调试说明书2014.1.27
目录1、准备工作:调试软件和程序安装(最好都安装,飞机拿到手后)………………………………………………………………………………2-3页2、第一步:拷贝程序过程,拿到手的飞机都是考入好程序的,只有自己需要DIY 时才用看此步骤,只是手机飞行可不看此过程(可先看FTDI与飞控连接图)………………………………………………………………………………3-6页3、第二步航模遥控器飞行篇(只有用航模遥控器飞行的看此步骤)(一定要认真看,在此步骤不用上电池,如需上电池请看第三步)(可先看FTDI与飞控连接图):………………………………………………………………………………7-11页4、第三步,都需认真看,遥控飞行前准备包含电池充电注意事项:(飞行一定注意安全,电池不要过充过放)………………………………………………………………………………12-13页5、附件1 FTDI与飞控连接图(旧版,13年12月前购买)………………………………………………………………………………14页6、安卓微型四轴安装调试说明书(安卓旧版,13年12月前购买)………………………………………………………………………………15-177、安卓手机遥控飞行篇(安卓旧版,13年12月前购买)………………………………………………………………………………18页8、安卓遥控和航模遥控混合版转换说明(安卓旧版,13年12月前购买)(只有安卓航模遥控版才有此功能,转换需要用电烙铁,同时需要好的焊接技术,新手谨慎操作) (19)9、微型四轴安装调试说明书(安卓软件)(安卓新版,14年之后购买)..........................................................................................20-22 10、安卓手机新版遥控飞行篇(安卓手机飞行,14年之后购买) (23)11、安卓遥控和航模遥控混合版转换说明(安卓新版,14年之后购买)(只有安卓航模遥控版才有此功能) (24)12、FTDI与飞控连接图(新版)(安卓新版,14年之后购买) (25)13、模友的操作经验与建议 (26)再此感谢瘦网虫给予大力支持,同时也期待各位模友的建议和意见。
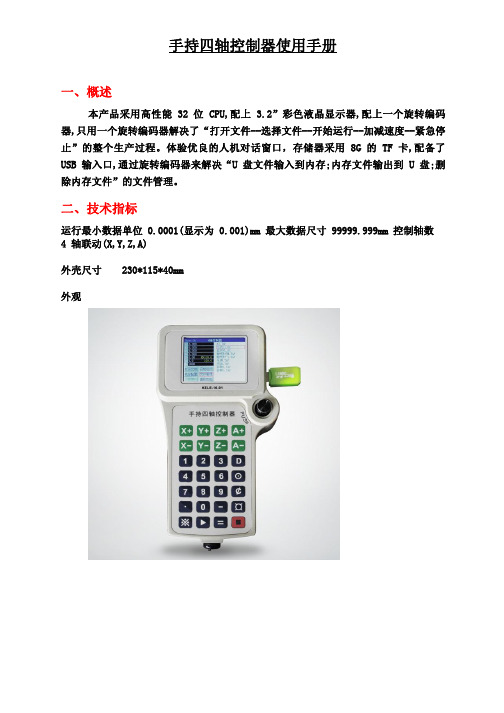
手持四轴联动控制器使用手册
R 表示圆弧 半径 F 加工 速度 在已知圆弧的起点和终点 的情况下,用半径编程,按几何作
图会现现两段圆弧,一个大圆弧 一个小圆弧,为了不致产生歧义, 规定 R>0 是小圆弧,R<0 是大 圆弧
对于整圆,因终点与起点 相重合,用 R 编程,会有无数解, 无法定义圆心位置,所以只能用 圆心坐标编程法
限位输入
使能: 是否选定限位功能 脚位: 限位脚位是固定的,所以不用 选, 电平: 输入高电平有效,还是低电平 的效, 当选用外部输入端来控制
开始运行 暂停 回原点 脚位可选 1,2,3 分别代表 N1,N2,N3
机械原点
使能: 是否选定限位功能 脚位: 限位脚位是固定的,所以不 用选, 电平: 输入高电平有效,还是低电 平的效, 方向:根据用户要求可正或负为机 器原点.负为 0 正为 1 通常 Z 轴选 1 为正方向为机械原点.
对刀:当要自动对刀时使能选择 1
回零低速:在返回机械原点时为了保证机械原点精度,会第二次归零速度. 高速:在返回机械原点时返回速度. 参考点:在自动对刀中介绍.
G 参数:
F,S,M3 不计:当选项 0 运行 G 代 码必须有 F(运行速度),S 主轴转 速,M03(主轴开关)值,当选项 1000 时运行 G 代码时默认 S2400 M03, F1000.当选项 3000 时运行 G 代码时默认 S2400, M03, F3000. 手轮参数:(选值范围 20-100)当选 100 时,手轮旋转移动一圈移动为 20cm,当 选 20 时表示为 20cm 的 20%=4cm,手轮旋转移动一圈移动为 4cm,用户可以根据 自已机器大小来选择这参数. 安全高度:出厂值为 5mm,当圆雕时安全高度一定要大于材料的半径.
tb509四轴飞行器操作说明

tb509四轴飞行器操作说明一、前言tb509四轴飞行器是一款智能无人机,具有飞行稳定、控制灵活、操作简单等特点。
本文将为您介绍如何操作tb509四轴飞行器,以帮助您快速上手并享受飞行乐趣。
二、准备工作在操作tb509四轴飞行器之前,您需要做一些准备工作:1. 确保四轴飞行器电量充足,可通过充电器将电池充满。
2. 根据实际情况选择飞行器的飞行模式,如室内模式或室外模式。
3. 找到一个开阔平坦的地方进行飞行,远离人群和障碍物。
三、操作步骤1. 打开遥控器电源,并将遥控器与四轴飞行器进行配对。
通常情况下,遥控器与飞行器的配对方式是通过按下遥控器上的配对按钮,并同时按下飞行器上的配对按钮,直到指示灯闪烁表示配对成功。
2. 将遥控器上的油门杆推到最低位置,此时四轴飞行器处于待机状态。
3. 将飞行器放在离地面约1米左右的位置,确保四轴飞行器周围没有人或障碍物。
4. 缓慢将遥控器上的油门杆推到最高位置,四轴飞行器将开始起飞。
在起飞过程中,您可以通过遥控器上的方向杆控制飞行器的方向,左右移动方向杆可使飞行器左右平移,前后移动方向杆可使飞行器前进或后退。
5. 在飞行过程中,您可以通过遥控器上的油门杆控制飞行器的高度,将油门杆推到合适的位置,飞行器将保持稳定的飞行高度。
6. 当您想要降落时,将遥控器上的油门杆缓慢推到最低位置,四轴飞行器将自动降落。
在降落过程中,您可以通过遥控器上的方向杆控制飞行器的位置,确保飞行器安全降落。
7. 在飞行过程中,如果遇到紧急情况或需要停止飞行,您可以通过按下遥控器上的紧急停止按钮,四轴飞行器将立即停止飞行并降落。
四、注意事项在操作tb509四轴飞行器时,需要注意以下事项:1. 在刚开始操作时,建议选择较为开阔的地方进行飞行,避免飞行器与障碍物碰撞。
2. 飞行器飞行高度不宜过高,以免造成飞行器失控或掉落。
3. 飞行器飞行距离不宜过远,以免失去遥控信号,导致飞行器无法控制。
4. 飞行器飞行时间有限,一般在10至15分钟左右,建议及时降落更换电池。
四轴飞行器--DIY手册 DEMO

G L 516四轴飞行器---D I Y 手册--------------------------------- 想飞的感觉不再是梦想!!此文献给广大的四轴爱好者。
原文:http://www.mikrokopter.c om/ucwikiDIY 网址: 制作: OURAVR 网友: gl516版本: V1.1 DEMO 日期:2009.6.20温馨提示: 安全第一!!!------特别谢鸣! 网友:pitolan feng_matrix RickyZhou cnmusic 的帮助和支持!TKS..h t t p://sh op 58290392.t ao ba o.co m/开门见山!GL516四轴系统的焊接,调试。
组装。
试飞。
一: 焊接1:飞控板焊接丝印(TOPLAYER+BOTTOMLAYER )1-1:新版飞控丝印图片:h t t p ://s h o p 58290392.t ao ba o.co m/PCB bottomlayer1-2: BOM (新版PCB)Part TypeDesignator Footprint +5J26 JPP 1K R25 G0603 1K R24 G0603 1K R16 G0603 1K R17 G0603 1K R18 G0603 1K R23 G0603 1K R20 G0603 1K R22 G0603 1K R19 G0603 1KR21 G0603 1N4007 D3 DIODEXX 1UF C4 G0603 1UFC3G0603h tt p://sh op 58290392.t ao ba o.co m/2K2 R6 G0603 2K R42 G0603 6K8 R13 G0603 10K R1 G0603 10K R3 G0603 10K R2 G0603 10K R4 G0603 10U/35V C37 ECAP 18K R14 G0603 20.000MHz Y1 OSC 22N C5 G060322N C6 G060322N C9 G060322N C8 G0603 22N C7 G0603 22PF C1 G0603 22PF C2 G0603 47K R37 G0603 47K R38 G0603 47K R36 G0603 100K R15 G0603 100N C19 G0603 100N C18 G0603 100N C16 G0603 100N C17 G0603 100N C11 G0603 100N C10 G0603 100N C12 G0603 100N C13 G0603 100N C21 G0603 100N C14 G0603 100N C23 G0603 100N C22 G0603 100N C25 G0603 100N C20 G0603 100N C15 G0603 100R R8 G0603 100R R7 G0603 100R R9 G0603 100R R10 G0603 100RR11 G0603 100U/6.3V SMD C29 ECAP 100U/6.3V SMD C30 ECAP100UHL1 805104 C26 G0603 104 C28 G0603 104 C27G0603 220K R5 G0603 330U/25VC36C220U/50Vh tt p://sh op 58290392.t ao ba o.co m/330U/25V C35 C220U/50V 680R R28 G0603 680R R29 G0603 680R R12 G0603 A7260 U4 MA7260 ATMEGA644_20AU U1TQFP-44 CAP C32 G0603 CAP C33 G0603 CAP C31 G0603 CAP C34 G0603 CON1 J13 JPPCON1 J7 JPPCON1 J9 JPPCON1 J15 JPP CON1 J3 JPP CON1 J8 JPP CON1 J4 JPP CON1 J16 JPP CON1 J5 JPP CONNECT J28 SIP4 DAC_X574 U6 SSO-10 ENC-03-N U9 ENC-03RM ENC-03-R U10 ENC-03RM FLY_C POWER S1 KAIGUAN GND J12 JPP GND J29 JPP GND J2 JPP GND J27 JPP GND J25JPPISP SOCKET SV5 2X3 CONNECT LED1 D2 LED LED2 D1 LED LM6484 U3 SO-14 LM7805 U8 TO220V LM7805U7 TO220V MCP1700-3002 U5 SOT-89 MMBT3904 Q2 SOT_23 MMBT3904 Q1 SOT_23 MPX4115A U2 SIP6 POWER D4 LED R30-W J30 JPP SPEAKERLS1BUZ14 SV1 SV1 2X5CONNECT SV2 SV2 2X3 CONNECT V1.2-10R R35 G0603 V1.2-10RR33G0603h tt p://sh op 58290392.t ao ba o.co m/V1.2-10R R34 G0603 V1.2-500K R32 VR V1.2-500K R31 VR V1.2/1.1-1K R27 G0603 V1.3-1K R26 G0603 V1.3-10K R39 G0603 V1.3-10K R41 G0603 V1.3-10K R40 G0603 VCC J11 JPP VCC J14 JPP VCC J1 JPPVCC J6 JPPVref J31 JPPXC1 J18 JPP XC2 J20 JPP XC3 J22 JPP XC4 J24 JPP XD1 J17 JPP XD2 J19 JPP XD3 J21 JPP XD4J23JPP备注:V1.2与V1.3的焊接区分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
烈火狂龙Mini四轴飞行器操作手册-安卓版
先感谢您选择烈火微型四轴,在准备试飞之前请仔细看完下面的相关重要信息,桨和护罩按图示来安装,注意:桨不能装错或装反,否则无法正常起飞。
本飞行器为X模式,此模式飞行更为灵活。
更便于携带微型FPV或微型摄像机等设备,满足不同的需求。
如何正确安装桨叶,首先认识一下正反桨,如下图,顺时针转风向向下的为正桨;逆时针转,风向向下的为反桨。
逆时针转顺时针转
图一正反桨识别
选配护罩的网友,可以先安装护罩到电机上,过后不要急着把桨装上去,桨要对号入座,板子上面标有转向图,还有桨的安装要便于识别航向,我常把白色的如下图安装,飞行时只要记得白色的为机尾就好飞了。
飞行器控制板上的电池插件对着自已就行,“烈火狂龙”字符那边为机头。
飞行器安装好后如下图,
飞行器运动方向
图二飞行器正面
图三飞行器侧面
开机次序:
1、先固定Mini四轴飞行器背面的电池,插上电池接口,此时指示灯
全亮,飞控上面两个红色和绿色指示灯闪烁,在闪烁完成之前,将飞行器置于水平地面上,初始化结束后,飞控上面红色指示灯常亮,绿色指示灯为通讯状态指示,有无线连接时亮。
蓝色指示灯为蓝牙状态指示,闪烁时表明没有与手机连接,常亮时表明已与手机连接,直接在安卓界面就可以控制飞行器进入起飞状态。
2、安装并打开APP
手机要求:android2.2以上操作系统、需要取得root权限、手机带重力感应、带蓝牙。
打开APP后,主界面如下图:
3、点击连接按钮,开启蓝牙并扫描设备
4、找到设备,FIRE DRAGON ,点击设备进行蓝牙配对,配对密码为:
1234
5、配对成功后自动返回控制界面,此时连接按钮变绿色
6、可选步骤:点击设置动作幅度和操作方式,设置完成后按左上方“返回”按钮返回主界面
可以将上述的比例栏的三个参数设为100%,表明使用最大动作幅度下面的微调栏三个参数全部设为0
新手建议选择触屏美国。
其它模式没有熟悉会不好控制。
7、点击启动按钮开始连接飞机,此时电路板连接灯等亮起
在此区域向上滑动为加油门,反之
减油门;按住不放向左滑动,飞行
器逆时针转向,向右滑动,飞行器
顺时针转向。
字符A为正常模式,B、C为锁尾模式,新手建议选B、C
数字1为关LED,2、3为打开飞行器上LED。
飞控板上面蓝色灯常亮为蓝牙已连接。
红色灯常亮表明初始化结束,绿色灯亮表明飞行器已经处于可起飞状态,加油门就可以飞。
下面是各种不同控制模式的解释,请选择你自己的习惯。
1、美国手:左手触摸控制油门,左手触摸控制旋转。
重力感应
控制前后和侧飞。
2、日本手:右手触摸控制油门,左手触摸控制旋转。
重力感应
控制前后和侧飞。
3、中国手:右手触摸控制油门,右手触摸控制旋转。
重力感应
控制前后和侧飞。
4、反日手:左手触摸控制油门,右手触摸控制旋转。
重力感应
控制前后和侧飞。
电池充电:
直接将Mini USB线插于USB接口另一端插上电脑USB口
或通用的手机充电器接口,充电时红色指示灯会亮,充满时绿灯亮。
无线频率:2.4G。
遥控距离:<10米。
飞行时间:5至9分钟。
新手操作时,切记分清楚航向(本飞行器为X模式,机头方向为两
个黄色浆方向),油门要适度,方向性操作时动作要柔和,不要突加突卸油门,否责极容易炸机,损坏电机或浆。
如果电机或浆损坏,需要换新的配件,要注意电机转向以及浆的正、反。
不能装错,否则无法起飞。
请勿在人多地方操作,注意安全!
烈火狂龙QQ:16053729
QQ群: 234879071
2013年2月23日。