机器人学导论第三章答案
机器人学导论复习题及参考 答案
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
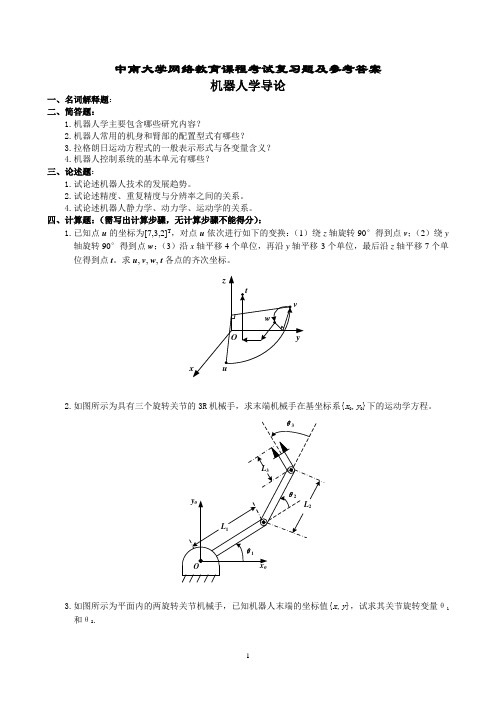
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
(完整word版)机器人学导论复习题及参考答案(word文档良心出品)
西安高学考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
工业机器人学第三章习题

A3-1.写出齐次变换矩阵 T,它表示相对固定坐标系{A}作以下变换。
B1) 绕Z 퐴轴旋转 90°; 2) 再绕X 퐴轴转-90°;푇3) 最后做移动【3 7 9 】;A3-2.写出齐次变换矩阵 T,它表示相对坐标系{B}做以下变换。
B 푇1) 移动【3 7 9 】;2) 绕X 퐵轴旋转-90°; 3) 绕Z 퐵轴转 90°。
3-3.求下面齐次变换的逆变换푇−1 0 1 0 −10 0 −1 2 −1 0 0 0 T = []13-4.已知 0.25 0.43 0.86 5.0A B T 0.87 −0.50 0 −4.0= [ ] 0.43 0.75 −0.50 3.0 0 0 0 1A求 T的第(2,4)元素.B3-5 已知矩阵? 0 −1 0 ? 0 0 1 ? −10 2 ?1] [代表齐次坐标变换,求其中的未知元素值(第一列元素)。
푈3-6 设工件相对于参考系{U}的描述为T,机器人基座相对于参考系푃푈的描述为T,已知B010−1100100−12−1000푈=[푇푃0105푈]푃=[]퐵001900010001要求机器人手爪坐标系{H}与工件坐标系{P}重合,试求变换퐻퐵푇3-7. 已知坐标变换矩阵푈퐴푇,퐵퐴푇,푈퐶푇.0.866−0.50001110000.5000.8660−100.866−0.50010푈=[]퐵퐴푇=[푇] 퐴001800.5000.866−200001000 10.866−0.5000−30.4330.750−0.5−3퐶=[푇]푈0.2500.4330.86630001画出空间尺寸链图,并求퐵퐶푇.3-8.如图3-17 所示的多面体顶点坐标系,试求4x4 的齐次变换矩阵푖−1푖푇和0푖푇(i=1,2,3,4,5).3-9. 如图3-18 所示的多面体各顶点坐标系,试求4x4 的齐次变换矩阵푖−1푖푇和0푖푇(i=1,2,3,4).3-10. 如图3-19 所正方体的顶点和中心坐标系,试求4x4 的齐次变换矩阵푖−1푖푇和0푖푇(i=1,2,3)。
中南大学机器人学导论复习题及参考答案
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
机器人学导论复习题及参考答案 新
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
4.试论述机器人静力学、动力学、运动学的关系。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3R机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。
3.如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x,y},试求其关节旋转变量θ1和θ2.P4.如图所示两自由度机械手在如图位置时(θ1= 0 , θ2=π/2),生成手爪力 F A = [ f x 0 ]T 或F B = [ 0 f y ]T 。
求对应的驱动力 τA 和τB 。
0x f ⎤⎥⎦5.如图所示的两自由度机械手,手部沿固定坐标系在手上X 0轴正向以 1.0m/s 的速度移动,杆长l 1=l 2=0.5m 。
设在某时刻θ1=30°,θ2=-60°,求该时刻的关节速度。
已知两自由度机械手速度雅可比矩阵为1121221211212212l s l s l s l c l c l c θθ---⎡⎤=⎢⎥+⎣⎦J6.如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称RPR 机械手),求末端机械手的运动学方程。
参考答案一、名词解释题: 二、简答题:1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。
机器人学导论作业答案
机器人学导论作业答案作业一一、问答题1.答:机器人的主要应用场合有:(1) 恶劣的工作环境和危险工作;(2) 在特殊作业场合进行极限作业;(3) 自动化生产领域;(4) 农业生产;(5) 军事应用。
2.答:工业机器人(英语:industrial robot。
简称IR)是广泛适用的能够自主动作,且多轴联动的机械设备。
它们在必要情况下配备有传感器,其动作步骤包括灵活的转动都是可编程控制的(即在工作过程中,无需任何外力的干预)。
它们通常配备有机械手、刀具或其他可装配的的加工工具,以及能够执行搬运操作与加工制造的任务。
数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。
该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。
3.答:科幻作家阿西莫夫机器人三原则:(1) 不伤害人类;(2) 在原则下服从人给出的命令;(3) 在与上两个原则不矛盾的前提下保护自身。
我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
4.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4) 机器人动力学;(5) 机器人控制技术;(6) 机器人传感器;(7) 机器人语言。
5.答:按几何结构分:(1) 直角坐标式机器人;(2) 圆柱坐标式机器人;(3) 球面坐标式机器人;(4) 关节式球面坐标机器人。
6.答:通常由四个相互作用的部分组成:执行机构、驱动单元、控制系统、智能系统。
7.答:一共需要5个:定位3个,放平稳2个。
8.答:机器人的主要特点有通用性、适应性。
决定通用性有两方面因素:机器人自由度;末端执行器的结构和操作能力。
9.答:工业机器人的手部是用来握持工件或工具的部件。
大部分的手部结构都是根据特定的工件要求而专门设计的。
机器人学导论第三章课后答案

机器人学导论第三章课后答案1、下面是奇奇在学习本单元时所作笔记的部分内容,其中说法不正确的是()[单选题] *A.拆解电动机时,要注意安全使用螺丝刀等工具B.用电器与发电机在工作时都是将其他形式的能转化为电能(正确答案)C.用思维导图或表格都能清楚地表示各种发电方式的能量转化情况2、对于制作校园生物分布图,下面说法不正确的是( )。
[单选题] *A.给生物编号,将号码记录在分布图上,可以有空间记录更多生物B.制作校园生物分布图必须独立完成(正确答案)C.分布图是整理信息,找出研究成果的好方法3、不同时期、不同类型的船具有不同的特点和发展趋势。
[判断题] *对(正确答案)错4、35铁钉生锈速度最快的是( )。
[单选题] *A.铁钉完全浸没在水中B.铁钉一半浸在水中一半暴露在空气中(正确答案)C.铁钉一半浸在油中一半在干燥的空气中5、藻类植物属于绿色开花植物。
( ) [单选题]对错(正确答案)6、“地心说”认为,()是宇宙的中心,并且静止不动。
[单选题] *A.地球(正确答案)B.太阳C.月球7、太阳系中,体积最大的行星是( )。
[单选题] *A.地球B.金星C.木星(正确答案)8、种子发芽的过程中最先出现的现象是()。
[单选题] *A.长出嫩芽B.种皮破裂C.种子膨大(正确答案)9、小船在行驶过程中容易偏离方向,以下()的方法能让小船保持一定的方向。
[单选题] *A.安装上船舵(正确答案)B.安装上风力推进装置C.安装蒸汽推进装置10、以下没有新物质产生的变化是( )。
[单选题] *A.水蒸发变成水蒸气(正确答案)B.白醋浸泡贝壳C.白糖加热变成焦糖11、设计制作小船需要考虑的因素是()。
[单选题] *A.经费预算B.材料和结构C.安全可靠12、蜡烛燃烧发生的变化属于( )。
[单选题] *A.物理变化B.化学变化C.物理变化和化学变化(正确答案)13、家用灯泡工作时既能发光,同时也会发热,说明电灯可以把电能转化为()。
2015年6月中南大学网络教育课程考试《机器人学导论》复习题及参考答案
一、名词解释: 1.自由度 2.机器人工作载荷 3.柔性手 4.制动器失效抱闸 5.机器人运动学 6.机器人动力学 7.虚功原理 8.PWM 驱动 9.电机无自转 10.直流伺服电机的调节特性 11.直流伺服电机的调速精度 12.PID 控制 13.压电元件 14.图像锐化 15.隶属函数 16.BP 网络 17.脱机编程 18.AUV 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的? 6.试论述工业机器人的应用准则。 四、计算题: (需写出计算步骤,无计算步骤不能得分) : T 1.已知点 u 的坐标为[7,3,2] ,对点 u 依次进行如下的变换: (1)绕 z 轴旋转 90°得到点 v; (2)绕 y 轴旋转 90°得到点 w; (3)沿 x 轴平移 4 个单位,再沿 y 轴平移-3 个单位,最后沿 z 轴平移 7 个单位 得到点 t。求 u, v, w, t 各点的齐次坐标。